

1. 서 론
2. 연구 방법 및 범위
2.1 드론 및 카메라 선정
2.2 지상기준점 선점
2.3 항공사진 촬영
3. 드론을 이용한 유량산정방법 개발
3.1 대상 지점
3.2 표면유속 측정
3.3 적용성 평가
4. 결 론
1. 서 론
드론은 과거 정찰이나 표적타격 등 군사적인 목적으로 활용되어 왔다. 그러나 현재 농업, 기상관측, 통신, 방송, 물류운송, 항공측량 등 광범위한 분야에서 활용되고 있으며 드론을 이용한 산업은 지속적으로 확대되고 있다. 드론 항공측량은 LiDAR (Light detection and Ranging, 혹은 Light+Radar), 적외선, 다분광․초분광 등 고가의 센서를 적용한 기법이 주류를 이루었지만, 드론의 유실사고가 빈번하게 발생하는 이유로 일반광학센서(디지털 카메라)를 이용한 항공사진측량 기법으로 대체되고 있다. 항공사진측량의 정확도는 다양한 분야에서 많은 연구를 통해 입증된 바 있다.
수자원 분야에서도 드론을 이용한 연구가 활발히 진행되고 있으며 그 중 하천측량 분야가 대표적이라 할 수 있다. 유속측정에 관한 연구는 국내·외 대부분 동영상 촬영을 통해 표면유속장을 측정하는 방법인 PIV (Particle Image Velocimetry) 기법이 대표적인 예이다. 특히 국외의 경우 Fujita et al. (2015)은 공중에서 촬영한 이미지를 높은 정확도로 안정화하는 방법을 개발했으며 안정화 된 이미지를 STIV (Space Time Image Velocimetry) 기법으로 하천 표면 분포를 측정하였다. 이미지 안정화 과정에서 SIFT (Scale Invariant Feature Transform) 및 RIPOC (Rotation Invariant Phase Only Correlation)와 같은 알고리즘을 결합하여 개발된 방법으로 2014년 우오노 강의 융설에 의한 홍수를 조사하기 위해 적용하였다. Detert et al. (2017)은 드론을 이용하여 최초로 완전한 비접촉식으로 유량측정을 실시하였다. 드론으로 촬영한 영상의 굴절을 보정하여 하천의 횡단면을 측량하고 표면유속을 LSPIV (Large Scale Particle Image Velocimetry) 방법을 적용하여 유량을 추정한 것이다. 국내의 경우 Yu and Hwang (2017)은 실험수로에서 드론에 장착된 비디오 카메라를 이용하여 영상 촬영, 영상 보정, 영상 분석, 후처리 네 단계 과정을 통해 표면영상유속측정법(Surface image velocimetry)을 적용하여 표면유속을 측정하였다. 앞선 연구의 표면유속 측정방법의 공통점은 동영상을 촬영하여 정지영상의 시간간격으로 나누어 디지털화를 위한 영상처리과정과 더불어 하천 내 유하하는 부유물의 실제좌표와 CRT (Cathode-ray tube coordinates)좌표 간의 좌표변환 과정을 통해 영상왜곡에 대한 보정을 수행해야한다.
본 연구에서는 항공사진측량 개념으로부터 국가기본도의 기본체계로 사용하고 TM (Transverse Meractor) 좌표계를 바로 적용하여 드론을 이용한 홍수기 유량측정방법을 개발하고자 한다. 드론을 이용하여 정사 촬영된 수표면 사진에 평면직각좌표계인 TM좌표를 부여하여 표면유속을 측정을 하고, 기측량된 단면자료로부터 수위에 대한 통수단면적을 적용하여 결과적으로 유량을 측정하는 방법이다. 기존 홍수 시 유량측정은 전자파유속계, 영상유속계, 레이더유속계, ADCP 등 첨단 측정장비와 부자를 이용하여 유량측정을 실시하고 있지만 예산, 인력, 안전 및 하천공사 등의 문제로 매년 모든 지점에서 측정을 실시하지 못하는 어려움이 있다. 이런 문제를 개선하기 위해 최소 인력이 단시간 간편하게 드론을 이용하여 유량을 측정할 수 있는 방법을 개발하였다.
2. 연구 방법 및 범위
2.1 드론 및 카메라 선정
드론은 크게 고정익(Fixed Wing)과 회전익(Rotary Wing)으로 구분된다. 본 연구에서는 하천의 표면유속을 신속하고 정확하게 측정하기 위해 회전익 드론을 활용하였고, DJI 사의 Phantom 4 pro 기체를 사용하였다. 드론의 성능은 정지비행 정확도 범위의 경우 수직으로 0.5 m, 수평으로 1.5 m 정도이며 최대 10 m/s의 바람저항력을 가지고 있다. 또한 최대 비행시간은 30분 정도이다. 드론에 장착된 카메라는 1인치 크기의 2000만 화소 센서가 장착 되어 있고 8초에서 1/8000초 범위의 셔터스피드와 2초에서 60초 범위의 일정 시간간격으로 연속촬영이 가능한 인터벌 기능이 있다. 또한 Fig. 1과 같이 3축(pitch, roll, yaw) 거치대(Gimbal)에 카메라가 부착되어 진동에 안정적으로 촬영이 가능하다. 자세한 제원은 Table 1과 같다.

Table 1.
Specification of drone and camera
2.2 지상기준점 선점
지상기준점(Ground Control Point, GCP)이란 항공사진측량 후처리 과정에서 항공사진의 외부 표정요소를 정확하게 결정하기 위해 항공사진 상에서 식별되는 점을 현장에서 정밀측량을 통해 기준좌표를 획득한 것을 말한다(Oh, 2016). 지상기준점 측량은 촬영대상 지역에서 GCP의 지상좌표를 산출하기 위한 일련의 측량 과정으로서 현장에서 Fig. 2(a)의 Virtual Reference Station DGPS (VRS DGPS) 측량 장비를 이용한 삼변측량을 통해 실시하는 지상측량을 말한다. GCP 측량은 비행 전에 대상지역에 Fig. 2(b)와 같이 대공표지를 설치하여 촬영된 사진의 절대위치 기준점으로 사용한다. 촬영 대상지역의 면적, 특성에 따라 적절한 GCP의 개수는 조절이 가능하다.

본 연구에서는 Fig. 3에서 보는 바와 같이 대상지점인 의정부시(신곡교) 지점과 영동군(영동제2교) 지점에서 각 지점별 하천 좌우안에 2개씩 총 4개의 GCP를 확보하여 VRS DGPS를 이용해 좌표 측량을 하였다. 측량된 GCP 값은 Table 2와 같고 공선조건에서 촬영된 정사영상의 보다 정밀한 보정을 위해 활용하였다. 본 연구는 하천에 유하하는 부유물 이동에 대한 2차원 해석이 필요하기 때문에 항공사진측량 개념에서 높이 값인 Z값은 제외하고 X, Y값만 이용하였다.

Table 2.
Result of GCP surveying
2.3 항공사진 촬영
드론을 이용하여 대상 지점의 항공사진 촬영을 위해서는 사전에 비행위치를 미리 파악하여 항로, 비행고도 등 비행에 장애 요소가 없는지 확인하여야 한다. 촬영에 앞서 반드시 대상 지점의 비행 가능여부를 확인하고 비행금지구역인 경우에는 허가신청을 통해 허가를 득한 뒤 촬영을 시작하여야한다. 항공사진측량을 위해서는 원칙적으로 비행허가와 별도로 국방부로부터의 항공사진 촬영 허가가 필요하지만 주요 국가·군사시설이 없고 비행금지구역이 아닌 곳은 저고도로 촬영이 가능하다.
항공사진의 촬영은 Fig. 4(a)와 같이 드론을 일정높이의 정지상태(Hovering)에서 하도 내 선점(選點)한 GCP 4개의 점이 포함되도록 카메라와 수표면에 유하하는 부유물이 공선조건을 유지할 수 있도록 정사 촬영하였다. 공선조건(Collinearity Condition)은 Fig. 4(b)와 같이 지면의 대상점, 사진에 촬영된 대상점의 영상점, 노출점(카메라의 렌즈 혹은 CCD)의 3점이 한 직선상에 위치한다는 조건을 말한다(Lee, 2016).
우리나라의 수치지도 및 수치정사영상의 좌표는 대부분 평면직각좌표계에 의한 횡메르카토르(Transversal Mercator projection, TM) 도법을 원칙으로 하며, 타원체는 세계측지계 GRS80 (Geodetic Reference System, 1980) 타원체를 사용하여 변환한다. TM좌표는 X축은 좌표계 원점의 자오선에 일치하여야 하고, 진북방향을 정(+)으로 표시하며, Y축은 X축에 직교하는 축으로서 진동방향을 정(+)으로 한다(Lee and Son, 2016). 우리나라에서는 TM좌표 또는 평면직각좌표계에서의 좌표 기준점으로 서부좌표계, 중부좌표계, 동부좌표계, 동해좌표계 4개의 원점을 사용한다. 따라서 본 연구에서는 드론으로 정사 촬영된 항공사진의 좌표계를 평면직각좌표계인 GRS80 TM좌표계 한국중부원점(2010)으로 정의하였다. 또한 GCP 좌표를 이용하여 보다 정밀하게 정사 보정하였다.

3. 드론을 이용한 유량산정방법 개발
3.1 대상 지점
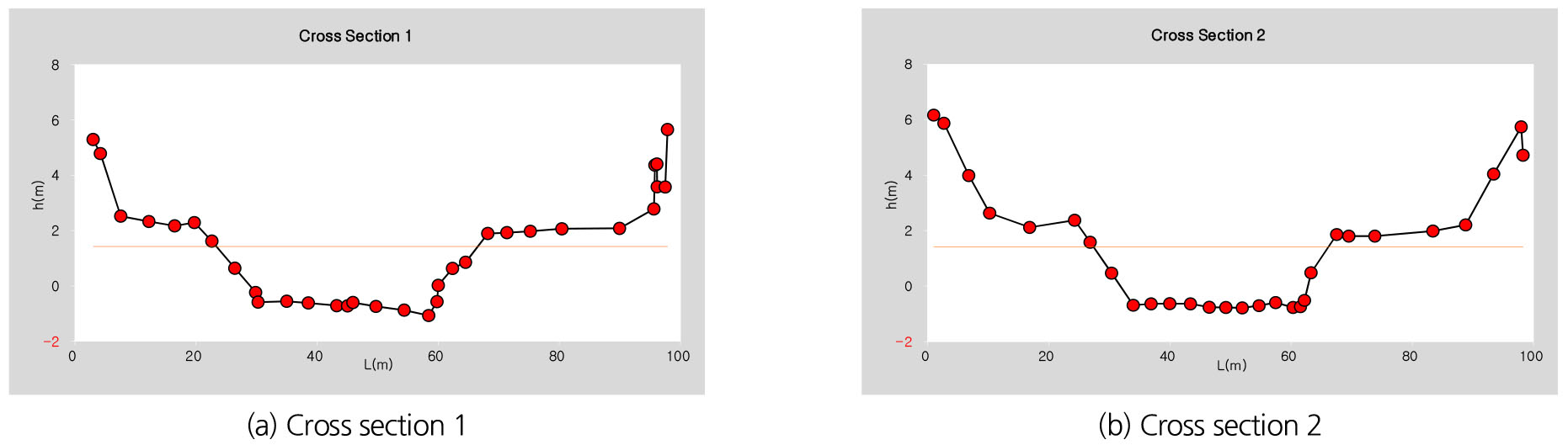
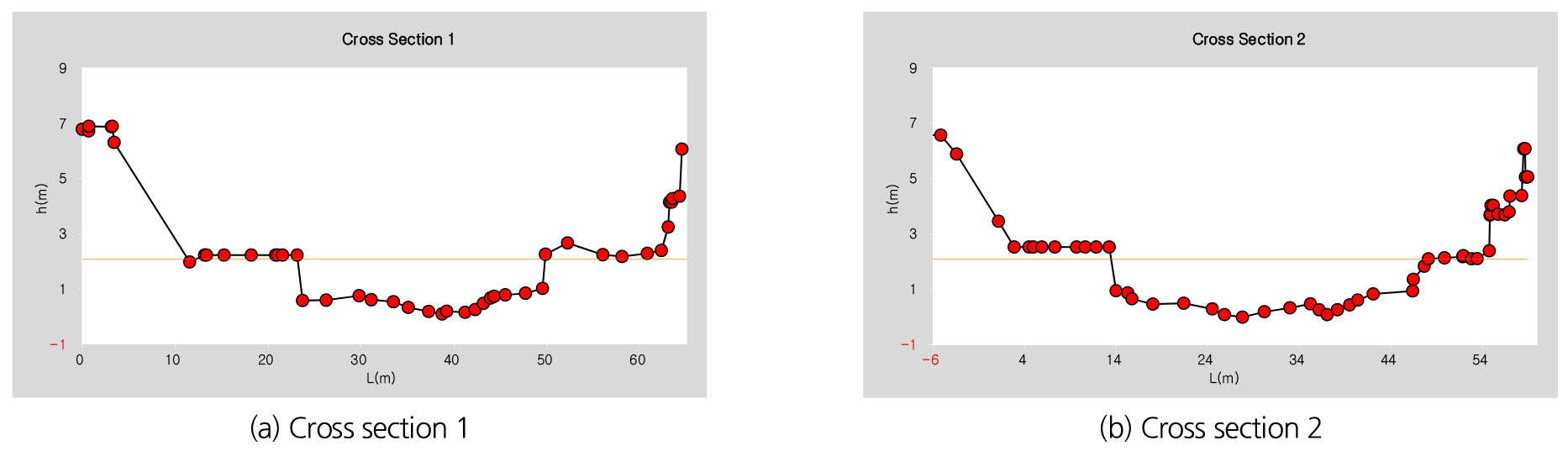
본 연구의 대상지점은 한강의 지류인 중랑천 상류에 위치한 의정부시(신곡교) 지점과 금강의 지류인 영동천 상류에 위치한 영동군(영동제2교) 지점을 선정하였다. 의정부시(신곡교) 지점의 측정은 신곡교 하류 약 500 m 위치에 Fig. 5에 도시한 바와 같이 유하거리 약 50 m 구간에 상류단과 하류단 횡단면을 선정하였다. 측정 시 수위에 따른 하폭은 약 45 m 정도의 흐름이 발생하였다. 영동군(영동제2교) 지점의 측정은 영동제2교 하류 방향에 Fig. 6에 도시한 바와 같이 유하거리 약 20 m 구간에 상류단과 하류단 횡단면을 선정하였다. 측정 시 수위에 따른 하폭은 약 30 m 정도의 흐름이 발생하였다.
3.2 표면유속 측정
3.2.1 부유물의 좌표 설정
드론을 이용한 표면유속 측정을 위해 지상 약 50 m 상공에서 정지비행 상태로 하도 내 흐름구간의 좌우안 GCP 4개점이 포함되도록 항공사진을 촬영하였다. 항공사진 촬영은 카메라 인터벌 기능을 3초 간격으로 설정하여 약 1분 내외동안 20 여장의 항공사진을 촬영하였다. 사진측량의 정밀도와 연관이 있는 GSD (Ground Sample Distance)는 사진의 해상도를 뜻하며 카메라 영상 이미지의 픽셀 당 취득되는 지표 거리로 비행고도와 비례한다. 본 연구에 이용된 Phantom 4 pro 기체의 경우 50 m 비행고도에서 수직 GSD는 1.62 cm/px, 수평 GSD는 1.37 cm/px로 산정되었다(https://www.propelleraero.com/gsd-calculator/). 20 여장의 부유물 위치를 점 디지타이징(Point Digitizing) 방법을 통해 부유물의 이동 경로에 대한 좌표를 부여하였다.
의정부시(신곡교) 지점은 2018년 8월 30일 강우가 멈추고 호우사상의 하강부에서 1개 성과를 촬영하였다. 수위 1.58 m 조건에서의 흐름에 따른 부유물 이동 위치는 Fig. 7(a)에서 보는 바와 같고 6개 부유물의 이동 위치에 대해 좌표를 부여하였다. 영동군(영동제2교) 지점은 2019년 7월 21일 강우가 소강상태에서 호우사상의 첨두 부근에서 수위 2.06 m, 2.09 m, 1.98 m의 3개 성과를 촬영하였다. 수위 1.98 m 조건에서의 흐름에 따른 부유물 이동 위치는 Fig. 7(b)에서 보는 바와 같고 10개 부유물의 이동 위치에 대해 좌표를 부여하였다. 촬영된 항공사진으로부터 점 디지타이징 작업을 통해 부여된 부유물의 위치별 TM좌표를 Table 3에 의정부시(신곡교) 지점에 대해서 대표적으로 제시하였다.
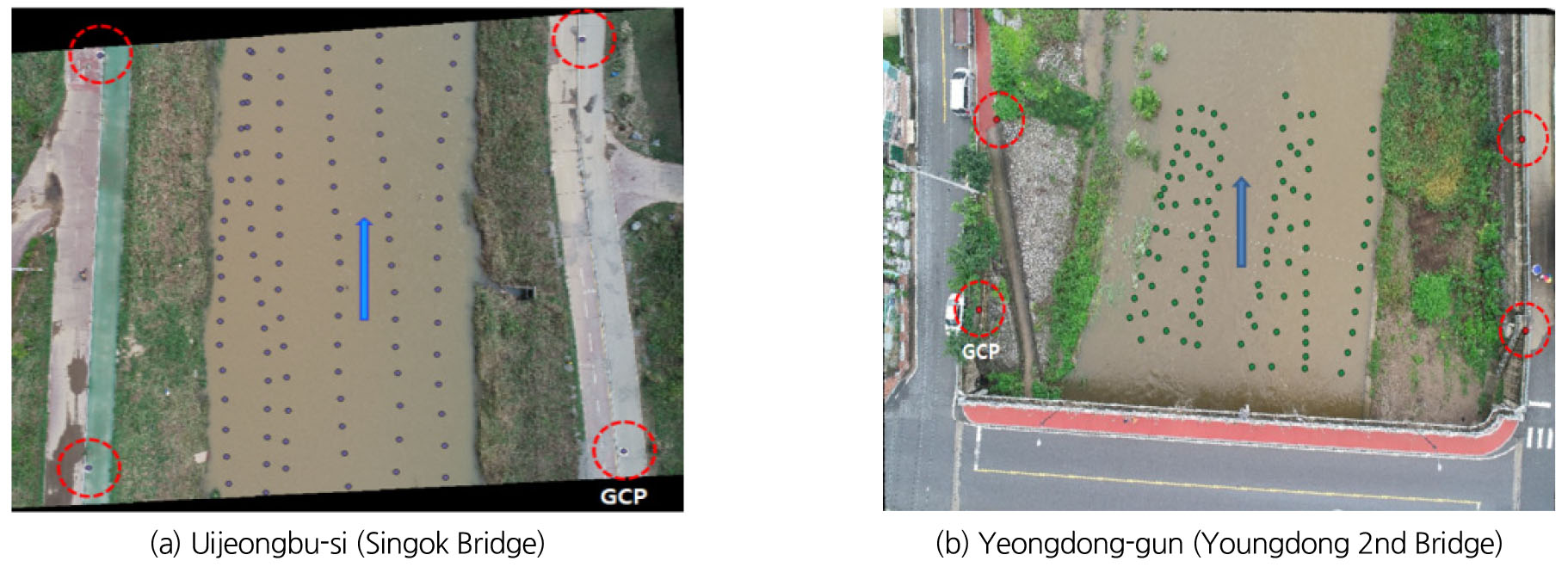
Table 3.
TM coordinate of floating point (Uijeongbu-si (Singok Bridge) station)
3.2.2 표면유속 산정
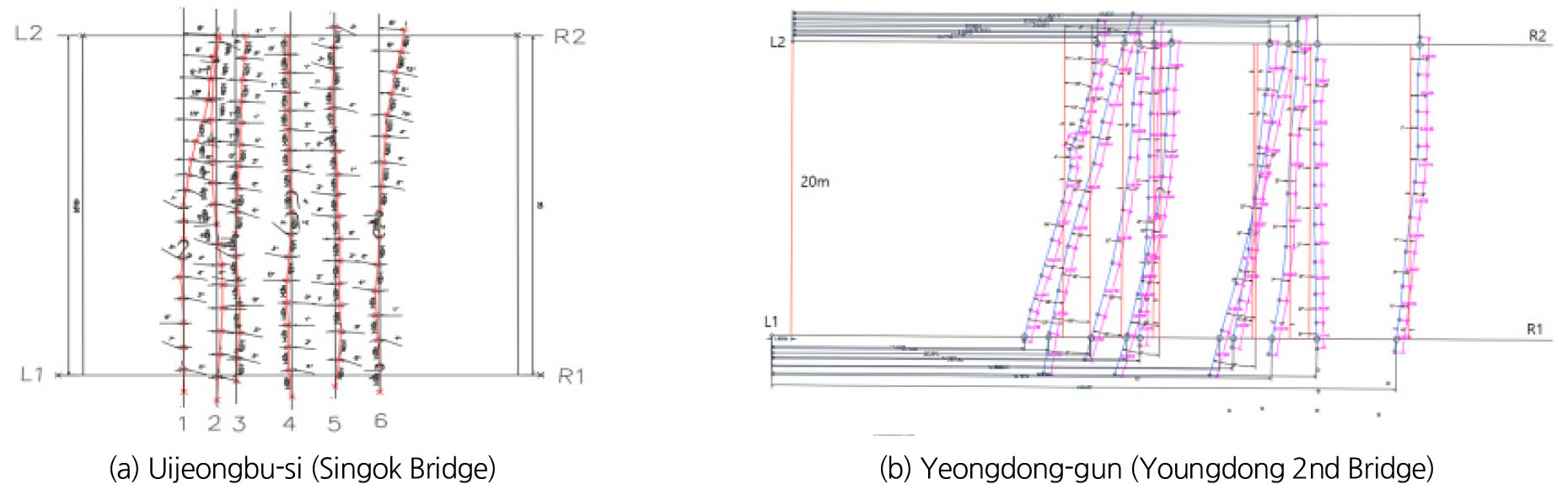
부유물의 점 디지타이징 작업을 통해 부여된 X, Y좌표로부터 흐름에 따른 3초간 이동거리 및 통수단면적인 상류단과 하류단의 횡단면의 직각방향에 대한 흐름각을 Fig. 8과 같이 산정하였다. 따라서 위치별 이동거리를 흐름각에 대해서 통수단면적의 직각방향거리로 Eq. (1)같이 보정된 이동거리를 산정하였다.
여기서, Lmp은 부유물의 3초간 이동거리, 는 위치별 통수단면적의 직각방향에 대한 흐름각이다.
또한, 상류단에서 하류단 까지 유하한 위치별 보정거리의 합인 Eq. (2)의 총 보정거리를 총 이동시간으로 나누어 Eq. (3)같이 표면유속을 산정하였다.
3.3 적용성 평가
3.3.1 유량산정
표면유속 산정에 따른 유량산정은 부자 측정에 의한 유량산정 방법인 Fig. 9와 같이 산정될 수 있다. 상하류 두 개의 횡단면선 사이의 중간지점에 횡단면선과 평행하게 또 다른 선 MN을 그을 수 있다. 두 개의 횡단면의 여러 측선을 분리하는 수면-점들이 점선으로 연결되면서 각 부자의 시작점과 끝점들이 도시되고 고정선으로 연결된다. 고정선이 MN 선을 가로지르는 부분에서 해당되는 평균유속(표면유속⨉보정계수)은 MN에 연직으로 도시되며 이러한 유속벡터의 끝점들은 유속-분포곡선을 형성하기 위해 연결된다. 상류단과 하류단의 횡단면에 해당되는 각 측선별 평균단면적에 유속-분포곡선에서 보여지는 각 측선의 평균유속을 곱할 경우 각 측선별 흐르는 유량이 산정되고 모든 측선에 대한 유량의 합은 전체 유량으로 Eq. (4)와 같이 산정된다. 한 측선에서의 평균유속은 해당 측선에 대한 유속-분포곡선 아래의 면적을 구적기를 통해 측정하여 결정하거나, 또는 구획을 지나 중간까지의 유속측정값과 동일한 근사값이 채택된다(ISO 748, 2007).
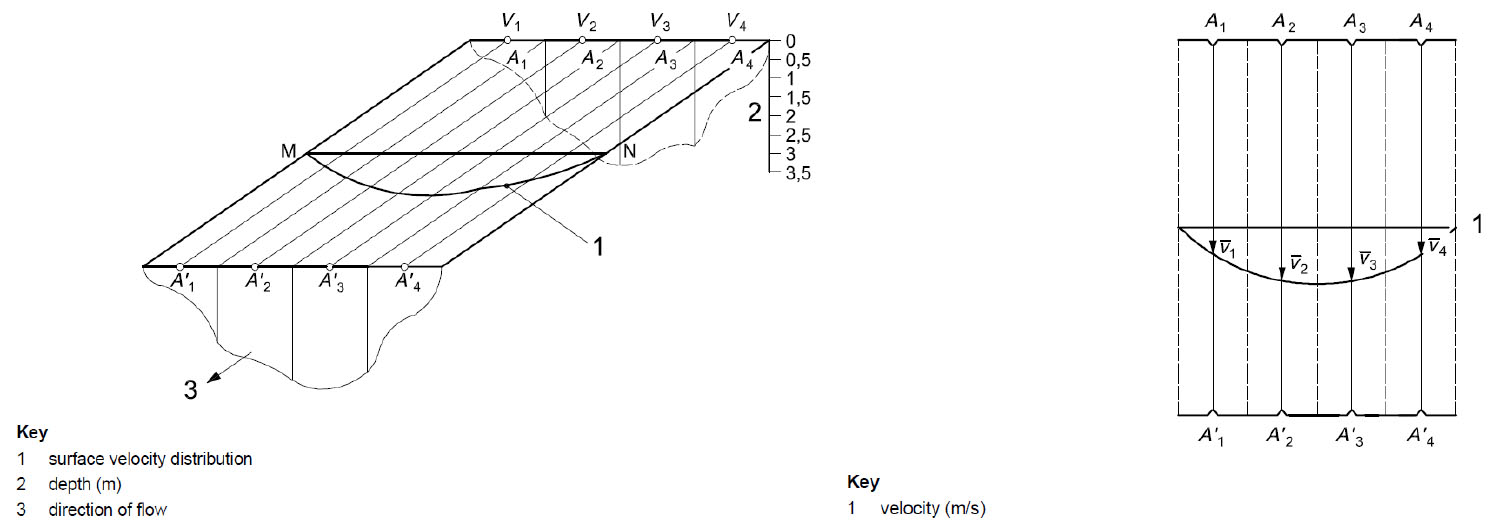
여기서, 는 각 측선별 표면유속, 는 상류단 측선별 통수단면적, 는 하류단 측선별 통수단면적이다.
본 연구에서는 평균유속 산정을 위한 보정계수는 일반적으로 적용하는 0.85를 3.2.2절을 통해 산정된 표면유속에 곱하여 평균유속을 산정하였으며, 상류단과 하류단의 횡단면에 해당되는 각 측선별 평균단면적은 Fig. 8에서 분석한 바와 같이 각 단면에서 부유물이 지나간 위치를 고려하여 측선별 평균단면적을 산정하였다.
3.3.2 수위-유량관계곡선과의 비교
드론으로 촬영한 항공사진 분석을 통해 산정된 유량과 지점별 당해 년도 수위-유량관계곡선식으로부터 산정된 유량을 비교하여 드론으로 측정된 유량의 정확도에 관한 비교 분석을 실시하였다. 의정부시(신곡교) 지점(ME, 2019)은 2018년 Flow Tracker, ADCP, 부자 등을 이용하여 44회, 영동군(영동제2교) 지점(ME, 2020)은 2019년 Flow Tracker, ADCP 등을 이용하여 37회 측정을 통해 수위-유량관계곡선을 개발하였다. 개발된 곡선식의 평가를 위해 표준오차 및 불확도를 검토한 결과 아래 Table 4에 제시한 바와 같이 의정부시(신곡교) 지점의 표준오차는 6.94%, 곡선식 불확도는 최소 2.31%에서 최대 4.03%로 매우 정교하게 개발된 것으로 판단할 수 있다. 또한 영동군(영동제2교) 지점의 경우도 표준오차 7.37%, 곡선식 불확도는 최소 2.46%에서 최대 6.49%로 마찬가지로 정교하게 개발되었다고 판단된다. 따라서 항공사진 분석을 통해 산정된 유량을 Fig. 10의 각 지점별 수위-유량관계곡선에 산입한 결과 매우 근접한 경향성을 나타내는 것을 확인할 수 있었다.
Table 4.
Uncertainty of rating curve
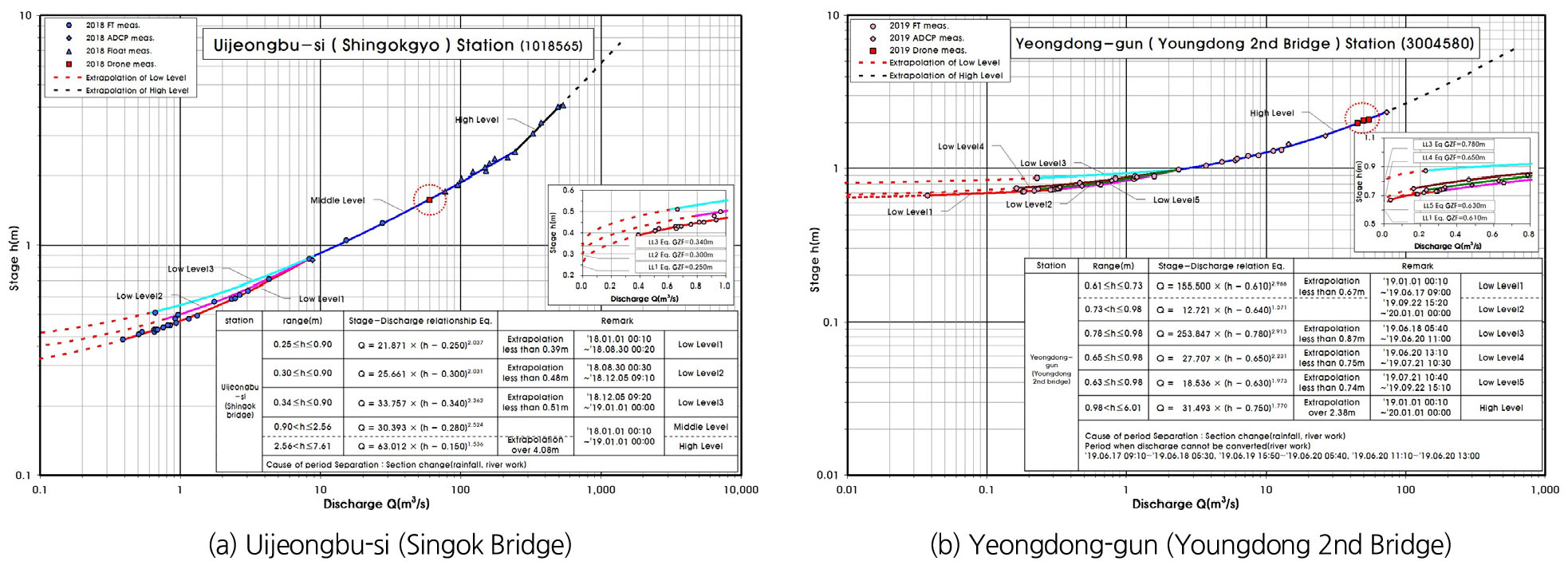
Table 5에는 수위-유량관계곡선식으로부터 산정된 환산유량과 드론으로 측정한 유량에 대해서 부유물의 이동경로를 보정하지 않은 유량과 통수단면적에 직각방향으로 흐름각을 고려하고 부유물이 지나간 위치별 평균단면적을 고려하여 보정한 유량에 대해 검토하였다. 검토한 결과 의정부시(신곡교) 지점의 경우 수위 1.58 m에서 환산유량이 58.93 m3/s, 미 보정유량이 60.13 m3/s로 약 2.04%, 보정유량이 59.87 m3/s로 약 1.60%의 편차율이 발생하였다. 영동군(영동제2교) 지점은 수위 2.06m에서 환산유량이 48.53 m3/s, 미 보정유량이 62.98 m3/s로 약 29.78%, 보정유량이 49.80 m3/s로 약 2.62%의 편차율이 발생하였다. 수위 2.09 m에서 환산유량이 50.53 m3/s, 미 보정유량이 65.73 m3/s로 약 30.08%, 보정유량이 54.35 m3/s로 약 7.56%의 편차율이 발생하였다. 수위 1.98 m에서 환산유량이 43.36 m3/s, 미 보정유량이 56.87 m3/s로 약 31.16%, 보정유량이 44.99 m3/s로 약 3.76% 편차율이 발생하였다. 미 보정유량의 경우 의정부시(신곡교) 지점은 부유물 이동경로가 큰 변화없이 통수단면적에 직각방향으로 이동하여 편차율이 낮게 산정되었고, 영동군(영동제2교) 지점은 대체적으로 부유물의 이동경로가 통수단면적의 직각방향에서 벗어나 편차율이 평균 30.34%로 높게 산정된 것으로 판단된다. 보정유량은 전체적으로 평균 약 3.88%로 5% 이내로 산정되어 드론을 이용한 항공사진 촬영에 의한 유량측정 방법의 적용성이 검증되었다고 판단된다.
Table 5.
Comparison of computation and measurement flow
4. 결 론
본 연구에서는 드론을 하천의 일정높이에서 정사 촬영된 수표면 영상을 항공사진측량 개념으로부터 GRS80 TM좌표계를 도입하여 하천 흐름의 표면유속을 산정하였다. 드론을 정지비행 상태에서 카메라 인터벌 기능으로 3초 간격 영상을 약 20매 가량 촬영하고 지상의 GCP를 이용하여 영상에 TM좌표를 부여하였다. 따라서 하천 흐름에 따라 유하하는 부유물의 이동경로를 좌표분석을 통해 실제 이동거리를 표면유속으로 환산하였다. 또한 표면유속을 보정계수를 곱하여 평균유속을 산정하고 통수단면적을 곱하여 유량을 산정하였다. 최종적으로 측정 지점의 수위-유량관계곡선식으로부터 산정된 유량과 드론으로 측정된 유량과의 비교를 통해 평균 약 3.88% 오차 를 확인하여 드론 측정유량의 정확도를 검증하였다. 따라서 드론을 이용한 홍수기 유량측정방법에 대한 적용성을 확인하였다.
추후 홍수기 유량측정에 있어서 신속하고 간편하게 측정이 가능하게 되어 측정인원을 사고위험으로부터 보호하고 홍수기 측정 시 필요인력을 다른 업무에 투입하여 자료 정확도 향상 등에 기여할 수 있을 것으로 판단된다. 다만, 드론의 비행고도 및 카메라 렌즈의 화각, 이미지 센서의 화소 등을 고려하였을 때 하천 규모의 제약이 있을 것으로 판단된다. 촬영된 영상에 지상기준점이 최소 4개 이상 포함되어야 좌표계 적용이 가능하기 때문에 하천 하폭이 최대 150 m 이하인 중소규모 하천에 적용 가능할 것으로 판단된다. 또한, 드론을 사용함에 있어서 야간, 바람 및 강우 등 환경적인 요인에 영향을 받을 수밖에 없는 점에서 측정 환경에 따라 사용상 한계로 작용할 수 있으나 이는 드론의 기술 개발이 계속되고 있다는 측면에서 가까운 시일 내에 충분히 개선될 여지가 있을 것으로 판단된다.
