

1. 서 론
2. 원적외선 카메라와 표면영상유속계
2.1 원적외선의 특징
2.2 FIR-SIV의 기본 원리
3. FIR-SIV의 야간 조건 측정 적용성 검토
3.1 실험 조건 및 방법
3.2 영상 분석
3.3 FIR-SIV의 주간 조건 측정 정확도 검토
3.4 FIR-SIV의 야간 조건 측정 정확도 검토
4. FIR-SIV의 안개 조건 측정 적용성 검토
4.1 실험 조건 및 방법
4.2 FIR-SIV의 안개 조건 측정 정확도 검토
5. 결 론
1. 서 론
최근, 신속하고 안전하게 유속을 측정할 수 있는 표면영상유속측정법(Surface Image Velocimetry, SIV)에 대한 관심이 높아지고 있다. SIV는 다른 유속 측정법과 비교해 그 장비 구성과 측정 방식이 매우 간단하고, 측정에 소요되는 시간이 매우 적기 때문에 신속한 유속 측정이 가능하다. 뿐만 아니라 측정 방식이 간단하여, 전문 인력이나 다수의 인원을 필요로 하지 않는다. 또, 집중호우로 인한 돌발홍수의 유속 측정이나, 보나 댐의 방류수와 같은 고속류의 측정이 가능하다. 더불어 SIV는 기존의 많은 연구를 통해, 그 측정 정확도가 매우 신뢰할 만한 수준임이 입증되었고, 이에 따라 현재에는 상용화 단계에 이르렀다(Yu et al., 2015; Yu and Hwang, 2016).
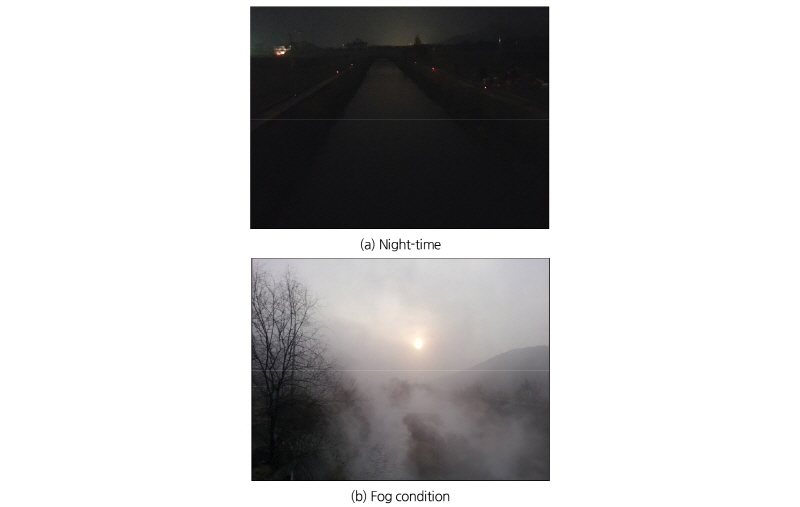
그러나 SIV는 현장 적용에서 큰 약점을 안고 있다. 이는 일반 카메라로는 촬영이 어려운 상황, 즉 ‘비가시(非可視) 환경’에 대해 적용할 수 없다는 점이다. 본고에서 언급하는 ‘비가시 환경’이란, Fig. 1과 같이 빛이 약한 야간이나 안개가 짙게 깔려 수면이 보이지 않는 상황에 해당한다. SIV는 일반 카메라를 이용하여 획득한 영상을 통해 유속을 산정하는 원리이기 때문에, 적절한 품질의 영상을 취득할 수 없다면 적용할 수 없다. 또한 안개로 인해 가시광선의 투과가 불가능한 상황에도 수표면의 영상을 획득할 수가 없어 SIV를 적용할 수 없다. 이에 따라 종전에 진행된 많은 SIV 관련 연구들의 적용 범위는 주로 주간과 안개가 없는 일반적인 상황으로 한정되어 있다.
이를 해결하기 위해 Kim et al. (2010)와 같은 몇몇 연구에서는 SIV를 야간에 적용시키는 방법들을 제시하였다. 처음에는 조명을 이용하여 하천을 밝히고 SIV를 적용하였으나, 이는 조명의 조사거리에 한계가 있어 규모가 작은 소하천을 제외하고는 적용이 사실상 불가능 하였다. 또 다른 방법으로는 근적외선(near-infrared ray)을 이용해 야간 영상 획득이 가능한 CCTV를 이용한 연구가 수행되었으나, 이 또한 야간에 조명을 비추는 것과 같이 인위적인 근적외선의 조사를 필요로 하고, 마찬가지로 그 조사거리의 한계에 부딪쳐 하폭이 매우 작은 하천을 제외하고는 적용이 불가능하였다(Fujita et al., 2011). 이처럼 기존에 진행된 야간의 SIV 적용 연구에서 발생한 문제는 모두 조명의 조사거리의 한계이다.
위와 같은 문제의 해결을 위해 최근 인위적인 빛의 조사가 필요 없는 원적외선 카메라(far-infrared ray camera)를 이용하는 방안이 제안되었다(Fujita, 2013; Fujita et al., 2013). 원적외선 카메라는 물체 자체가 방출 혹은 반사하는 원적외선 에너지를 이용하여 영상을 획득하기 때문에 주간과 야간 모두 인위적인 빛의 조사 없이 영상을 획득할 수 있다. 또한 원적외선의 파장이 길다는 특성 때문에 원거리 촬영에 보다 유리할 뿐만 아니라 안개나 연기를 투과할 수 있다는 특징을 가지고 있다. 이는 국내 하천 적용에 있어 매우 유리한 특징 중 하나이다.
국내 하천의 경우 지형적으로 주위가 산으로 둘러싸여 수면 위로 냉기의 침강이 잘 이루어지는 장소가 많다. 이로 인해 찬 공기가 그보다 따뜻한 수면상을 이동할 때 발생하는 증기안개(steam fog)가 계절을 가리지 않고 빈번히 발생하며, 안개의 짙은 정도가 매우 강해 일반 카메라로는 수표면 흐름을 촬영하기가 매우 어렵다. 또한 집중호우가 발생하는 경우에도 하천 수면위로 짙은 안개가 생성되어 SIV의 적용이 매우 어려운 상황이 발생한다(Kim et al., 2014). 이처럼 안개는 SIV 적용에 있어 해결하기 어려운 문제점 중 하나이다.
따라서 원적외선 카메라를 SIV의 장비로 사용이 가능할 경우, 일반 카메라로 수표면 흐름의 촬영이 불가능한 야간과 안개 상황에도 표면 유속 측정이 가능해져 기존 SIV의 가장 큰 문제점이었던 비가시 환경에서의 적용부분을 다소 해결할 수 있게 될 것으로 보인다. 그러므로, 향후 SIV의 근본적인 문제 해결을 위해, 원적외선 카메라를 이용한 SIV의 야간과 안개발생시 표면 유속 측정 정확도를 정량적으로 평가하고 검토할 필요가 있다.
이에 본 연구에서는, 원적외선 카메라를 이용한 표면영상유속계의 비가시 환경 내 표면 유속 측정 적용성을 검토하고자 한다. 이를 위해, 명지대학교 토목환경공학과 수리실험동 야외 개수로 실험 장치를 이용하여 기존 SIV의 표면 유속 측정 결과와의 비교를 통해 원적외선 카메라를 이용한 표면영상유속계의 비가시 환경 내 측정 성능을 평가하였다. 본고에서는 편의를 위해 ‘원적외선을 이용한 표면영상유속측정법’을 FIR-SIV (Far-Infrared-Ray Surface Image Velocimetry)로 지칭하기로 한다.
2. 원적외선 카메라와 표면영상유속계
2.1 원적외선의 특징
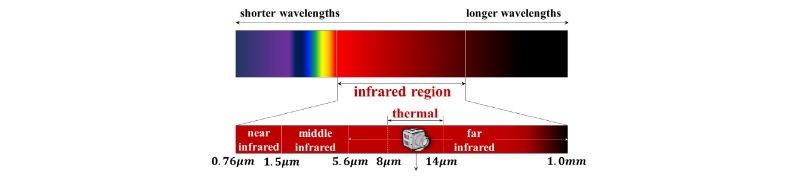
적외선은 전자파의 일종으로 열의 매체가 불필요하고, 열원으로부터 직접 전자파가 방출되는 성질을 가진다. 열원이라 함은 물을 포함해 우리 주변에 보이는 모든 물체를 의미한다. 즉, 눈에 보이는 모든 물체는 지속적으로 전자파를 방출하고 있기 때문에 적외선 카메라를 이용하여 이를 검출하면 주간과 야간에 관계없이 영상을 획득할 수 있다. 적외선의 파장 및 원리를 구체적으로 나타내기 위해 스펙트럼을 Fig. 2에 도시하였다. 그림에 표시된 적외선 영역의 좌측은 가시광선 영역이고 우측은 마이크로파의 영역으로 적외선의 파장대역은 그 중간에 위치한다.
과거 야간 촬영을 위해 사용한 근적외선 카메라는 가시광선 파장대역의 바로 옆에 위치하는 근적외선 파장대의 적외선을 감지한다. 이러한 근적외선 카메라(보통 적외선 카메라라고 부른다)는 대표적으로 우리 주변에서 흔히 볼 수 있는 CCTV 카메라 등이 있다. 야간에 CCTV 카메라를 바라보면 렌즈 주변부의 LED 램프가 적색으로 발광하는 것을 볼 수 있다. 이는 CCTV 카메라가 램프를 통해 적외선을 자체적으로 조사하고 이에 반사된 적외선을 렌즈로 감지하는 원리인데, 근적외선의 파장은 가시광선의 파장에 매우 가까워 가시광선에서 가장 파장이 긴 적색을 포함하기 때문이다. 이렇게 인위적으로 조사되는 적외선은 그 조사거리에 한계가 존재하여 원거리 촬영에 매우 불리하다.
이에 반해 원적외선 카메라는 물체 자체에서 방출되는 적외선을 감지하기 때문에 근적외선 카메라와 달리 인위적인 적외선의 조사과정이 필요하지 않다.(이 때문에 원적외선 카메라는 열영상 카메라라고도 부른다.) 또한 절대온도 이상의 모든 물체는 각기 고유의 방출률(emittance)에 따른 적외선을 계속적으로 방출한다(Kaplan, 2007). 이 때 방출되는 적외선의 파장대는 8~14 µm로 원적외선 파장대역에 해당한다. 따라서 여러 분야에서 사용되는 대부분의 원적외선 카메라는 일반적으로 8~14 µm파장대의 원적외선을 감지하도록 개발되었다. 본 연구에서 실험을 위해 사용된 원적외선 카메라 역시 8~14 µm의 원적외선을 감지할 수 있다. 그렇기 때문에 원적외선 카메라를 이용하는 경우 야간에도 수면의 흐름을 영상으로 획득할 수 있다.
반면에 원적외선 카메라를 이용한다고 해서 주간과 야간에 동일한 질의 영상을 획득 할 수 있는 것은 아니다. 이는 물체가 방출하는 원적외선의 파장대가 물체 표면의 온도에 따라 변한다는 특성 때문인데, 향후 원적외선 카메라를 SIV로써 사용하기 위해 문제를 야기할 수 있는 매우 중요한 부분이다. 물체 표면의 절대 온도  와 방출하는 에너지
와 방출하는 에너지  의 관계는 다음의 식(Stefan-Boltzmann’s law)과 같다.
의 관계는 다음의 식(Stefan-Boltzmann’s law)과 같다.
 (1)
(1)
이렇게 온도에 따라 변하는 적외선 파장대의 크기로 인해 획득되는 원적외선 카메라의 영상은 계절, 시간, 주변 환경 등에 따라 변하게 된다. 그러나 FIR-SIV의 하천 영상에서 유속 분석을 위해 중요한 부분은 수면과 추적자간의 구분을 가시화하는 것이다. 앞서 언급하였듯이 모든 물질은 각각 고유의 적외선 방출률을 가지고 있으므로 같은 온도라 할지라도 다른 파장대역의 적외선을 방출한다. 따라서 주간과 야간 획득 영상이 다르더라도 추적자와 수면간의 구분만 가능하다면 유속 분석에 큰 문제가 없다고 볼 수 있다. 다만 이는 가정일 뿐이며 같은 흐름 조건에서 영상 조건에 차이가 발생할 때 유속 분석 정확도에는 어느 정도의 불확실성이 분명 야기될 수 있다. 따라서 이에 대한 정밀한 검토가 필요하다.
2.2 FIR-SIV의 기본 원리
앞서 설명한 바와 같이, FIR-SIV는 기존 SIV에서 촬영 장비인 비디오 카메라를 원적외선 카메라로 대체한 것이기 때문에 근본적인 표면 유속 측정원리가 크게 다르지 않다. 따라서 표면영상유속계에 대한 구체적인 설명은 Fujita et al. (1998), Roh (2005), Bae (2017) 등을 참고하기 바라며, 본고에서는 생략한다.
3. FIR-SIV의 야간 조건 측정 적용성 검토
본 연구에서는 FIR-SIV의 비가시 환경 내 표면유속 측정 적용성을 검토하기 위해, 실험 수로를 이용하여 야간과 안개 발생 조건에 대한 FIR-SIV의 유속 측정 정확도 평가 실험을 수행하였다. FIR-SIV의 유속 측정 정확도 평가 참조 대상으로는 같은 조건 내 동시에 측정한 SIV 측정 자료를 사용하였다.
본 연구에서 수행하는 정확도 평가는 USGS (U.S Geological Survey)의 유량 측정 장비의 정확도 평가 기준을 참고하여 수행하였다. 기준에 의하면 측정 장비의 정확도는 5%를 기준으로 그 적합성을 평가하며, 이 때 정확도 참조 대상으로는 참값으로 간주할 수 있는 측정 장비를 사용하여야 한다(Rantz, 1982). 본 연구에서 정확도 평가를 위한 참조 대상으로써 사용하는 SIV는 이미 많은 선행 연구를 통해 그 정확도가 매우 높음이 입증되었으며, 표면 유속장을 측정할 수 있는 장비로 유일무이하므로 가장 적합한 참조 대상으로 판단된다. 또한, FIR- SIV는 근본적으로 그 원리가 SIV와 다르지 않기 때문에 SIV를 기준으로 정확도를 평가하는 것이 우선이라 판단된다. 따라서 본 연구에서는 SIV 측정 결과 대비 FIR-SIV 측정 결과의 상대오차 5%를 장비 적합성 평가 기준으로 설정하였다.
실험을 위해 본 연구에서는 명지대학교 토목환경공학과 수리실험동의 야외 개수로 실험 장치를 이용하여 실험을 진행하였다. 정확도 평가를 위한 참조 대상은 SIV이기 때문에 측정 결과의 비교는 주간 결과와 야간 결과라는 시간의 차이가 발생하는데, 정확도 검토를 위해서는 주간과 야간 측정 시점의 흐름이 동일해야 한다. 따라서 이를 위해 실험이 진행되는 동안 흐름을 유지하기 위해 개수로 실험 장치의 작동을 지속적으로 유지하였으며, 초음파 수위계를 이용하여 수위가 유지됨을 확인하였다.
추가적으로 FIR-SIV의 주간과 야간 유속 측정 성능에 차이가 있을 수 있음을 고려하여, 야간 유속 측정 정확도를 평가함과 동시에 주간 유속 측정 정확도를 함께 평가하였다. 또한 이를 통해 측정 시점이 다른 주간과 야간의 측정 결과를 모두 검토함으로서 야간 유속 측정 정확도 검토 결과의 유효성이 입증될 수 있다고 판단된다.
3.1 실험 조건 및 방법
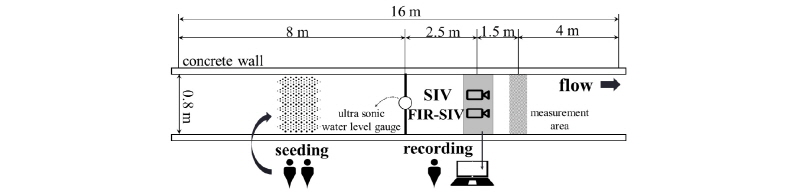
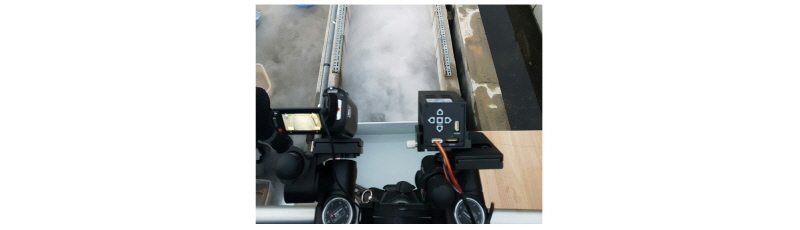
실험 모식도는 Fig. 3과 같다. 수로에는 전자유량계가 설치되어 있어 일정한 유량공급이 가능하고 흐름조건을 장시간 유지하는 것이 가능하다. 실험에서 형성한 흐름 조건(Table 1)은 유량 0.092 m3/s, 수위 0.25 m, 평균 유속 0.46 m/s이고, 이에 상응하는 Froude 수는 0.29로 상류 흐름이다.

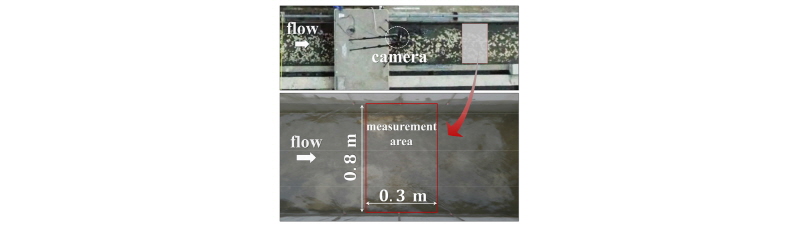
실험을 위해 사용한 원적외선 카메라와 일반 카메라의 제원은 Table 2와 같다. 측정 구간은 Fig. 4와 같이 카메라 설치 위치에서 하류로 1.35 m 떨어진 지점으로부터 흐름방향으로 0.3 m 구간에 해당하며, 좌표 변환 및 영상 왜곡 보정을 위해 6개의 참조점(reference point)을 설치하였다. 또한 영상 획득을 위해 일반 카메라와 원적외선 카메라를 측정 단면 상류부에 나란히 설치하였으며, 이 때 카메라 렌즈 중심부는 수면으로부터 2 m 높이에 위치한다. 이 때 두 카메라의 촬영 부각(angle of depression)은 60°로 측정단면을 바라보도록 설치하였다. 또한 흐름의 가시화를 위해 쌀튀밥을 추적자로 사용하였다.

주간 조건에서의 영상은 SIV와 FIR-SIV를 동시에 적용하여 획득하였고, 야간 조건에서의 영상은 주간의 흐름을 야간까지 유지하여 FIR-SIV만 적용하여 획득하였다. 각각의 영상은 15초의 길이로 4회씩 획득하여 총 60초의 영상을 획득하였다. 이 동영상은 1,800 프레임으로, 정확도 검토를 위해 충분한 양의 자료라 생각한다. 또한 흐름의 유지를 확인하기 위해 초음파 수위계를 이용하여 수위를 지속적으로 검토하였으며, 그 결과는 Fig. 5와 같다.

3.2 영상 분석
정밀한 정확도 검토를 위해 획득된 영상 내 측정 단면을 하류로부터 4개의 횡방향 측선으로 나누어 각각의 측선별로 결과를 비교하였다. 또한 수로 벽면 주변부는 수로 벽면의 마찰로 인해 흐름에 교란이 발생하여 추적자가 정상적인 유동을 보이지 않으므로 분석 대상에서 제외하였다. 따라서 각각의 측선은 양안에서 5 cm범위를 제외하고 2.5 cm 간격으로 27개 측점에 대하여 표면 유속을 산정하였다.
각 지점별 표면 유속 분석을 위해 적용한 상관영역(inter-rogation-area)의 크기는 SIV의 경우 24 × 29 화소, FIR-SIV의 경우 30 × 30 화소이다. SIV와 FIR-SIV는 사용되는 각 카메라의 제원에 따라 그 화각이 달라 획득되는 영상의 크기가 다소 차이가 나므로, 이에 적용되는 상관영역 크기 역시 달라질 수 있다. 또한 현재까지 표면영상유속계의 상관영역 크기의 결정은 그 기준이 마련되지 않았기 때문에, 일반적으로 사용자의 경험에 의존하여 그 크기를 결정한다.
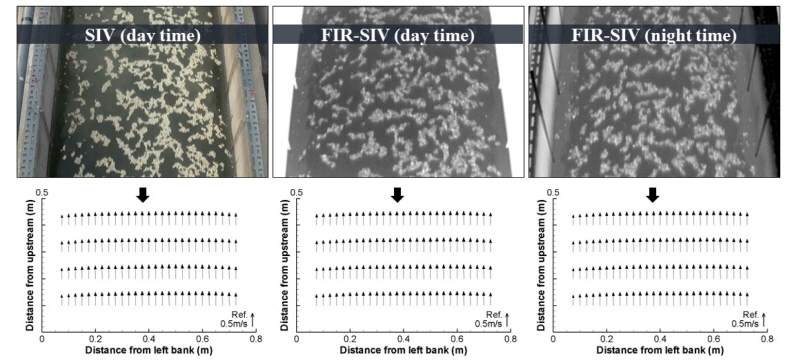
각각의 카메라로 획득된 영상과 분석된 유속장은 Fig. 6과 같다. 획득된 영상을 보면 일반적으로 지금까지 사용해온 주간 SIV 획득 영상과 비교하였을 때, FIR-SIV의 주간과 야간 영상은 모두 흐름을 선명하게 가시화하는데 문제가 없음을 알 수 있다. 다만 주간과 야간의 영상이 수로 벽면에서 다소 상이하게 나타나는 것을 볼 수가 있는데, 이는 앞서 원적외선 카메라의 특성에서 설명한 바와 같이 물체의 표면온도에 따라 변하는 원적외선 파장의 특성에 따라 나타난 차이이다. 따라서 주간에는 수로 벽면 콘크리트의 온도가 매우 높은 상태이기 때문에 영상 내에서 가장 높은 명암값을 가진 반면, 야간에는 수로 벽면 콘크리트의 온도가 감소하여 방출하는 원적외선 파장이 짧아져 낮은 명암값으로 표현된 것을 확인할 수 있다.
각각의 분석 결과는 1,799개 순간유속장의 평균으로 나타내었다. 벡터도상으로 볼 때는 육안으로 그 차이가 거의 보이지 않을 정도로 FIR-SIV 측정 결과가 SIV 측정 결과와 비슷하며, 야간의 측정 결과도 거의 같은 결과를 보였다.
3.3 FIR-SIV의 주간 조건 측정 정확도 검토
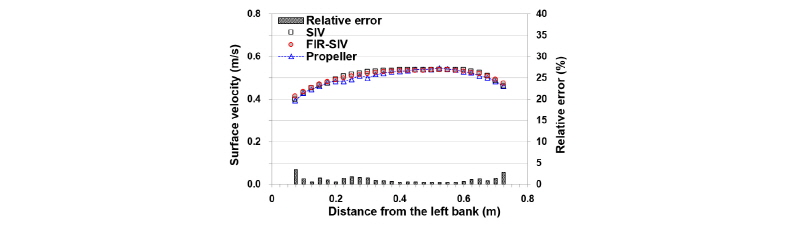
FIR-SIV 표면 유속 측정 정확도를 정량적으로 분석하기 위해 일반 비디오 카메라의 동영상을 이용한 SIV 측정 결과를 비교 기준으로 선정하였다. 이렇게 하면, 두 장비 사이의 차이는 영상 촬영장비만으로 한정된다. 그러나, 먼저 SIV의 표면 유속 측정 정확도를 먼저 검토할 필요가 있다. 이제까지 SIV의 정확도에 대해서는 Fujita et al. (1998), Roh (2005), Kim et al. (2013) 등 많은 연구가 있다. 따라서, 구체적인 SIV의 정확도에 대해 검토할 필요는 없지만, 최소한 현재 진행중인 실험에 대해서는 기존의 방법으로 유속을 검토할 필요가 있다고 판단하여 프로펠러 유속계로 유속분포를 측정하였다. 유속 측정에 사용한 프로펠러 유속계는 KENEK사의 VOT2-100- 05N으로 프로펠러의 직경은 5 mm 이다. 이 유속계를 이용하여 수표면 직하에서 1분간 측정한 유속분포와 같은 상황을 SIV로 측정한 결과는 Fig. 7과 같다. 여기서 SIV와 FIR-SIV는 모두 프로펠러 유속계의 측정 결과와 좋은 일치를 보이고 있다. 측정의 최대 오차는 5.6%이며, 평균 오차는 1.5%이다. 프로펠러 유속계는 프로펠러가 충분히 수중에 잠긴 상태에서 측정을 해야 하므로, 수표면 유속을 측정하는 SIV와의 사이에 약간의 오차는 피할 수 없다고 생각한다. 이후에는 측정 유속의 기준을 SIV로 할 것이므로, 다음부터는 프로펠러 유속계에 의한 측정 유속은 표시하지 않는다.
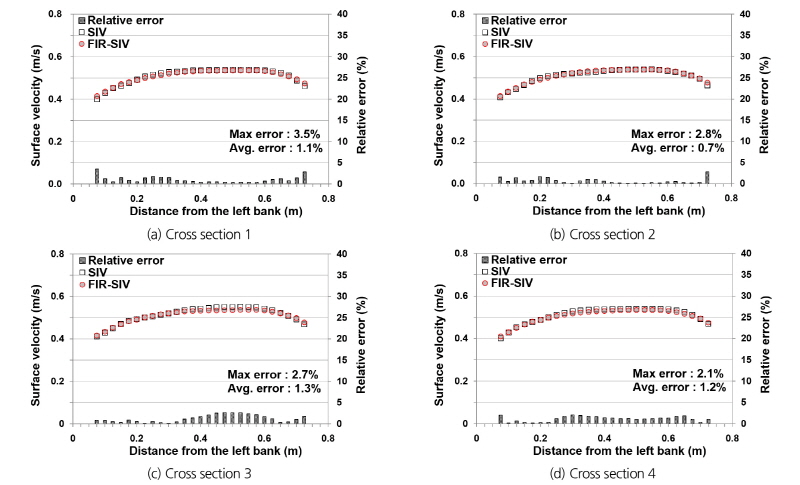
FIR-SIV 표면 유속 측정 정확도를 정량적으로 분석하기 위해 각 측선별로 표면 유속 산정 결과를 비교하였다. 주간 조건에 대한 표면 유속의 비교 결과는 Fig. 8과 같다. 추가적으로 SIV 측정 결과 대비 FIR-SIV 측정 결과의 상대오차를 그래프상에 나타내었으며, 여기서 상대오차는 Eq. (2)와 같이 산정하였다.
Relative error (%) =  (2)
(2)
위 식에서  는 FIR-SIV의 표면 유속 산정 결과이며,
는 FIR-SIV의 표면 유속 산정 결과이며,  는 SIV의 표면 유속 산정 결과이다. 이 기준을 사용하면, FIR-SIV 측정 결과의 상대오차는 순수하게 장비의 차이에 따른 것이 된다.
는 SIV의 표면 유속 산정 결과이다. 이 기준을 사용하면, FIR-SIV 측정 결과의 상대오차는 순수하게 장비의 차이에 따른 것이 된다.
결과를 보면, SIV 측정 결과와 FIR-SIV 측정 결과의 표식이 거의 겹친다. 또한 그래프 하단의 상대오차를 확인해보면 4개 측선의 비교 결과 상대오차의 최대치가 3.5%, 평균이 1% 내외로 매우 낮음을 알 수 있다. 이는 본 연구에서 평가하는 정확도의 기준 5% 이내에 포함되므로 매우 높은 정확도를 가져 적용상에 문제가 없다고 판단된다. 다시 말해, 주간 상황에 FIR-SIV를 사용하는 경우 기존 SIV를 대체하여 사용하여도 무방하다는 결론을 내릴 수 있다.
또한 본 실험 결과에서 발생한 최대 상대 오차인 3.5%는 유속으로 환산하면 0.014 m/s 에 상응한다. 이는 평균 0.5 m/s의 표면 유속을 생각하면 매우 작은 차이이며 이는 FIR-SIV의 성능과 무관한 다른 오차 발생 요인으로부터 나타날 수 있는 차이라고 생각한다. 앞서 언급한 바와 같이 SIV의 측정 결과는 분명 참값이 아닌 FIR-SIV의 측정 정확도를 판단하기 위한 기준이므로, 이러한 차이가 발생한다고 하여 FIR-SIV의 측정 정확도가 SIV보다 낮다고 판단할 수는 없다. 다만, 본 연구의 목적이 FIR-SIV의 적용성 평가이므로, 이미 정확도가 검증된 SIV를 기준으로 향후 적용상 문제의 여부를 판단하는데 연구의 초점을 두어 평가하였음을 참고하길 바란다.
3.4 FIR-SIV의 야간 조건 측정 정확도 검토
야간 표면 유속 측정 정확도 검토 과정은 주간의 경우와 동일하다. 다만, 주간과 야간이라는 측정 시기의 차이가 존재하며, 이에 따라 수로와 수면의 온도에 다소 차이가 발생한다. 이로 인해 원적외선 영상이 주간과 야간에 다소 차이가 존재한다는 것을 Fig. 6에서 확인한 바 있다. 그러나 수면과 추적자의 명암값에는 차이가 거의 존재하지 않는다. FIR-SIV의 야간 표면 유속 측정 정확도를 정량적으로 비교 분석한 결과는 Fig. 9와 같다.
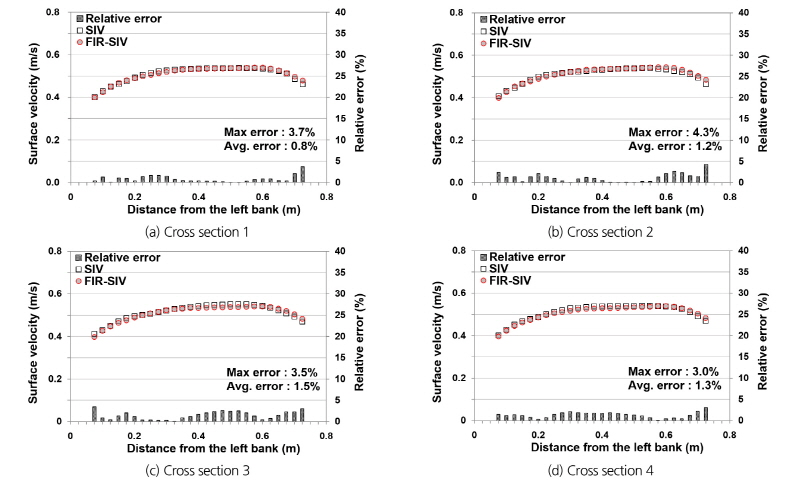
이 결과에서 주간과 동일하게 FIR-SIV 측정 결과의 표식이 SIV의 것과 매우 겹치는 것을 확인할 수 있다. 즉 야간에도 마찬가지로 SIV 측정 성능과 크게 다르지 않으며 정확도가 매우 높음을 알 수 있다. 상대오차를 보면 4개 측선의 비교 결과 상대오차 최대치는 4.3%, 평균 상대오차는 1% 내외로 주간 결과와 크게 다르지 않다.
또한 그래프를 보면 최대 상대오차가 4개 측선에서 모두 양안에서 발생하는 것을 확인할 수가 있다. 이는 앞서 설명한바와 같이 양안에서는 수로 벽면 마찰로 인해 흐름에 교란이 발생하고, 이에 따라 추적자가 정상적인 유동을 보이지 않아, 중앙부에 비해 상대적으로 유동하는 추적자의 수가 비교적 적기 때문이다. 본 실험의 결과에서는 그 차이가 5% 이내이기 때문에 큰 문제는 없다고 판단된다.
결론적으로 FIR-SIV의 야간 유속 측정 상대오차는 본 연구의 정확도 평가 기준인 5% 내에 포함될 뿐만 아니라, 평균 상대오차가 1% 내외로 주간 결과와 마찬가지로 매우 높은 정확도를 보여 적용상에 문제가 없음이 확인되었다. 즉, FIR-SIV의 측정 성능은 가시광선의 유무와 관계가 없으므로 주간과 야간 모두 사용이 가능하다고 판단된다.
4. FIR-SIV의 안개 조건 측정 적용성 검토
야간의 표면유속측정은 지금까지 선행된 많은 SIV 관련 연구에서 수차례 지적되어 왔으며, 이를 해결하기 위한 많은 노력(Fujita, 2013; Fujita et al, 2013; Kim et al., 2015)들이 있었다. 반면에 안개의 경우는 야간과 같이 매일 반드시 나타나는 현상은 아니며, 발생하더라도 그 지속시간이 야간과 비교하면 매우 짧은 수준이기 때문에 문제점으로 지적된 바가 비교적 적다. 하지만, 최근 국내의 경우 국지성 집중호우의 발생 빈도가 급증하고 있고, 자연하천에서 집중호우가 발생하는 경우에는 수면위로 짙은 안개가 깔려 SIV를 적용할 수 없게 된다. 뿐만 아니라, 1절에서 언급한 바와 같이 국내 하천의 지형적 특성상 새벽녘이면 증기안개가 발생하여 SIV의 적용이 불가능한 경우가 빈번하다.
원적외선 카메라는 기존 SIV의 야간 문제 해결을 위해 제안된 기기지만, 기기의 특성상 안개를 투과할 수 있는 장점을 지니고 있기 때문에 이를 적용하여 위와 같은 문제의 해결이 가능하다면, 기존 SIV가 지닌 비가시 환경에 대한 한계점을 모두 해결 할 수 있을 것이라 판단된다. 따라서 본 장에서는 FIR-SIV의 안개 조건 유속 측정 정확도 평가 실험을 통해 그 적용성을 검토하였다.
4.1 실험 조건 및 방법
본 실험에서 사용한 수로는 앞선 실험과 같으며, 실험을 진행하는 동안 흐름 조건의 변화로 인해 발생하는 오차요인을 배제하기 위해 초음파수위계를 이용하여 수위를 기록하고 안정된 흐름 조건(Fig. 10) 내에서 실험을 수행하였다. 실험의 흐름 조건은 Table 3과 같다.


안개 조건을 재현하기 위해 드라이아이스를 이용하여 수면위로 매우 짙은 안개를 발생(Fig. 11)시켰다. 드라이아이스는 이산화탄소를 압축하여 고체화시킨 것이며, 주변에 발생하는 연기는 공기를 냉각시켜 발생하는 수증기로 실제 하천에서 발생하는 증기안개와 그 성질이 같다. 따라서 안개 조건의 재현에 적합한 실험 방법으로 판단된다. 또한 본 연구의 주된 관심사는 매우 짙은 안개 조건에서의 FIR-SIV 유속 측정 성능 평가이므로, 재현 가능한 최대 강도의 안개를 발생시켜 실험을 수행하였다.
측정 단면 및 카메라 설치 조건, 추적자의 공급 조건, 영상 획득 조건은 4장과 동일하다. 실험 순서로는 먼저 안개가 없는 조건에서의 SIV 영상을 획득한 후, 안개 재현 조건에서의 SIV와 FIR-SIV 영상을 획득하였다. 본 실험의 목적은 FIR-SIV의 적용성 검토이지만, 기존 SIV의 안개 조건 적용의 적합성을 판단하고 한계를 확인하기 위해 안개 조건에서의 SIV 적용 실험을 함께 진행하였다.
4.2 FIR-SIV의 안개 조건 측정 정확도 검토
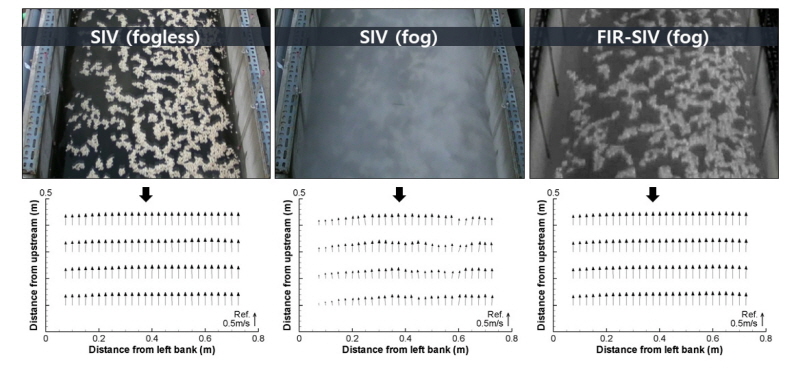
결과 분석을 위한 분석 조건은 4장과 동일하며 각각의 카메라로 획득된 영상과 산정된 유속장은 Fig. 12와 같다. 영상을 보면 안개 조건에서 SIV는 수면의 촬영이 거의 불가능함을 알 수 있다. 반면에 FIR-SIV는 안개가 있는 경우에도 흐름의 가시화가 매우 선명하게 되었음이 확인되었다. 또한 벡터도를 보면 영상 획득 결과에서 예상할 수 있듯이 안개 조건에 대해 SIV는 측정이 제대로 이루어지지 않았고, FIR-SIV는 측정 성능에 큰 문제가 없음을 확인할 수 있다.
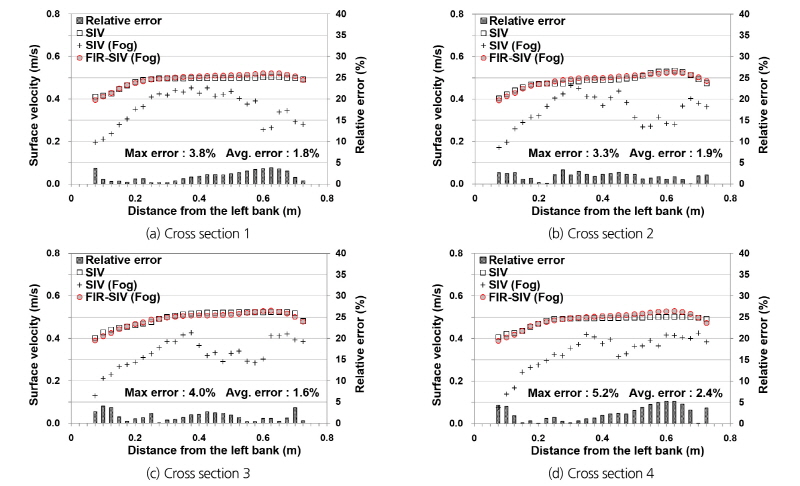
이를 정량적으로 분석한 결과는 Fig. 13과 같다. 각각의 표면 유속 측정 결과를 보면 SIV측정 결과는 측정 정확도 평가에 의미가 없을 정도로 매우 낮은 측정 정확도를 보인다. 더불어, 횡단면 표면 유속 분포의 경향 또한 참조 값과 매우 다르고 불규칙한 것으로 보아 측정 결과의 신뢰성이 매우 떨어진다. 이를 통해 기존의 SIV는 짙은 안개 조건에서의 적용이 사실상 불가능 할 것으로 판단된다.
반면에 FIR-SIV 측정 결과가 안개가 없는 경우의 정확도와 크게 다르지 않게 높은 것으로 확인이 된다. 상대오차를 확인하였을 때 최대 오차는 5.2%로 본 연구의 측정 장비 적합성 기준인 5%를 초과하였으나, 평균적으로 2% 내외로 매우 높은 정확도를 가진 것으로 나타났다. 여기서 최대로 발생한 상대오차 5.2%는 유속으로 환산시 0.03 m/s에 상응하며, 이는 앞서 3.2절에서 언급한 바와 같이 FIR-SIV 성능과 무관한 다른 오차 발생 요인에 의한 차이로 보인다. 결론적으로 안개 조건에서의 FIR-SIV 표면 유속 측정 평균 상대 오차가 본 연구에서 평가하는 정확도 기준 5% 이내에 포함되므로 높은 정확도를 가진다고 판단한다. 이에 따라 FIR-SIV는 안개 조건에서 적용하는데 문제가 없으며, 기존 SIV로 측정이 불가능하였던 짙은 안개 조건의 경우 FIR-SIV를 사용하면 해결할 수 있다.
5. 결 론
본 연구에서는 기존 SIV에서 적용상 문제가 발생하는 비가시 환경조건인 야간과 안개 조건에 대한 FIR-SIV의 적용성을 검토하였다. 이를 위해 소규모 콘크리트 실험수로에서 각 조건에 대한 SIV와 FIR-SIV 측정 결과의 비교를 통해 정확도를 평가하였다. 또한 FIR-SIV의 야간 조건 적용성을 검토하기 위해, 측정 성능에 다소 차이가 발생할 수 있는 주간 조건과 야간 조건의 유속 측정 정확도를 함께 검토하였다. 결과적으로, 참조값인 SIV 측정 결과 대비 야간 유속 측정 결과의 상대 오차 평균은 1.2%, 최대 4.3%로 높은 정확도를 보였다. 또한 평균 상대 오차 1.0%, 최대 3.5%인 주간 측정 결과와 비교해 볼 때 측정 상대오차가 거의 차이가 나지 않는 것으로 보아, 가시광선의 유무는 FIR-SIV 측정 성능에 영향을 미치지 않는다는 결론을 얻을 수 있다. 따라서 FIR-SIV는 주간과 야간에 관계없이 기존 SIV를 대체하여 사용이 가능할 것으로 판단된다.
다음으로 안개 조건 적용성 검토를 위해 실험 수로내에 드라이아이스를 이용하여 짙은 안개를 발생시켜 SIV와 FIR- SIV의 측정 성능을 비교 검토하였다. 결과적으로 SIV 측정 결과 대기 평균 상대 오차는 1.9%, 최대 5.2%로 매우 높은 정확도를 보여 안개 조건에 적용이 가능함을 확인하였다. 이에 반해 기존의 SIV는 안개가 발생하였을 때 측정 정확도가 매우 떨어져 사실상 적용이 불가능함을 확인하였다. 따라서 FIR- SIV는 기존 SIV로 측정이 불가능했던 안개 조건에 대해 적용이 가능할 것으로 판단된다.
본 연구에서는 그동안 지적되어 왔던 SIV의 비가시 환경 적용상 문제점을 해결하기 위해 제안된 원적외선 카메라의 적용성을 정밀하게 검토하였다. 결과적으로 기존 SIV의 적용이 불가능한 야간 및 안개의 비가시 환경에 대해 FIR-SIV를 적용할 수 있음을 확인하였다. 추가적으로 본 연구에서 진행한 안개 조건에 대한 표면영상유속계의 적용은 국내외적으로 최초의 시도이며, 이는 향후 SIV 관련 연구에서 중요한 기초자료로 활용될 수 있을 것으로 판단된다. 또한 지속적으로 지적되어 왔던 SIV의 야간 적용 문제가 FIR-SIV의 이용으로 해결할 수 있음을 확인하였으므로, 본 논문의 자료를 기초로 향후 다양한 방향으로의 연구가 가능해질 것이라 생각한다.
다만 본 논문에서는 하나의 흐름 조건에 대한 실험만을 진행하였으므로, 향후 이를 고려한 다양한 흐름 조건에서의 적용을 통한 추가적인 연구가 필요하다고 판단된다. 또한 원적외선 카메라의 특성에서 살펴본 바와 같이 주간과 야간에 상이한 영상이 나타나므로 이에 대한 문제를 검토할 필요가 있다. 뿐만 아니라 FIR-SIV 연구는 이제 시작 단계로서 아직까지 연구 사례가 많지 않기 때문에, 본 연구를 기점으로 향후 다양한 환경조건에 대한 적용 연구가 필요하다고 보인다.
