

1. 서 론
2. 모의 누수 사고 시나리오 구성방법 및 탐지기법
2.1 모의 누수 사고 시나리오 구성
2.2 Deep Neural Network
3. 적용 및 결과
3.1 적용 관망: Grid-networks
3.2 가상 관망의 규모 별 누수탐사 성능
3.3 가상 관망의 계측기 종류 별 누수탐사 성능
3.4 가상 관망에서 계측기 개수 및 위치에 따른 누수탐사 성능
4. 결 론
1. 서 론
상수도시스템은 효율적인 유지 및 관리를 위해 압력계, 유량계, 밸브 등의 설비를 통해 관리된다. 또한 설치된 후 효율적인 데이터의 관리를 위해 Supervisory Control and Data Acquisition (SCADA)를 사용한 데이터를 감시 및 제어할 시스템이 적용되고 있다. 이를 통해 상수도시스템의 비정상상황을 식별하는 일반적인 방법은 압력 및 유량과 같은 시스템 특성 값의 예측오차를 실시간으로 모니터링하여 비정상상황 발생을 감지하는 것이다(Jun and Choi, 2022). 하지만 대표적인 비정상상황인 누수는 신고에 의한 식별이 주를 이루는데, 신고에 의한 누수탐사는 신고 파열누수로 정의되며 누수발생비율 중 매우 낮은 비율을 차지한다. 실제로 누수사고의 대부분은 미신고 파열누수로써 파열 후 지속시간과 보수시간 등으로 총 누수량 중 가장 많은 누수량을 차지한다. 또한 접합부나 연결부위 등에서 발생하는 배경누수 또한 지속시간을 통하여 무시할 수 없는 양의 누수가 발생할 수 있다. 이와 같은 이유로 국내에서는 유수율 제고를 위한 종합계획을 설립하여 상수도시스템 DB화, 블록시스템 구축 등을 실시하여 최적의 시스템 운영관리를 통해 목표 유수율을 유지하기 위한 노력을 하고 있다. 또한 국내에서의 누수탐사를 위한 방법은 누수율이 높은 지역이나 과거 누수 수리건수가 많고 경과 년도가 오래된 지역을 위주로 면의 접근, 선의 접근, 점의 접근 방법에 따라 순차적으로 시행하여 최종 누수지점을 탐사하게 된다. 일반적으로 데이터 분석을 통한 누수 식별 방법으로는 야간최소유량법(K-water, 2009)이 있다. 이 방법은 누수탐사를 수행할 지역의 일일 유입유량 중 야간최소유량을 측정하여 야간 사용량을 제외한 나머지를 누수량으로 추정하는 방법이다. 하지만 해당 방법을 통하여 신뢰도 높은 누수 예측을 실시하려면 정확한 야간사용량의 예측이 필수적이며 해당 지역 및 블록에 대한 면밀한 검토 또한 이루어져야 한다. 또한, 현장 탐사 중에서는 대표적으로 단계시험(K-water, 2009)이 존재한다. 단계시험은 각 구간에 설치된 제수밸브를 차폐하여 고립구역내 유량변화를 분석하여 누수를 식별하는 방법이다. 하지만 단계시험은 한 단계씩 밸브를 차폐하며 찾는 형식의 누수탐사기법으로서 관망의 형태 및 밸브의 위치에 따라 많은 제약이 따른다. 또 다른 현장 방법으로는 누수음 탐지기를 활용하는 것인데 청음봉, 전자식 누수탐지기, 노이즈 로거 등을 활용하여 관로에서의 누수위치를 탐사하는 것이다. 이와 같은 방법을 통해 누수신호를 정확히 특정하기 위해 Park et al. (2018)은 상수도관의 누수신호 특성 및 누수지점 추정을 위한 연구를 진행한 바 있다. 미신고 파열누수의 누수 지속시간 단축을 위해서는 적극적인 누수제어가 필요하지만 전문인력 및 블록시스템 구축 여부 등과 같은 한계가 존재한다. 또한 탐사인력의 부족 또한 큰 영향을 미치고 있으며 현재까지도 민원에 의한 탐사가 높은 비율을 차지하고 있다. 이를 해결하기 위하여 체계적인 업무분담과 인력을 절감할 수 있는 누수탐사 방법이 반드시 필요한 실정이며 그에 따라 전략적인 누수탐사를 위한 접근법이 다양한 방법을 통해 연구되고 있다. Lee and Yoo (2021)는 LSTM 기반의 딥러닝 알고리즘을 활용하여 누수발생에 대한 인지 모형을 개발하였으며, Ha et al. (2019)는 상수도 관망에서의 누수 감지 애플리케이션에 대한 주성분 분석(Principal Component Analysis, PCA)기법의 잠재성을 평가하였다. Yoon et al. (2012)은 상수도 관망해석 프로그램인 EPANET의 Emitter 기능을 활용하여 계수 최적화를 통해 누수위치를 결정하여 현장 대응의 경험적 누수탐지 기법을 대체하기 위한 기법을 제안하였다. Yoo et al. (2014)는 절점의 수요량 및 관 마찰계수의 불확실성에 대한 분석과 Emitter 기능을 활용하여 수리해석 모형을 구축하였다. Lee and Yoon (2004)은 가속도계를 이용한 상수도 배관의 누수지점 탐지를 위해 이론적 연구 및 실험을 진행한 바 있으며, Jung and Lansey (2015)는 Nonlinear Kalman Filter를 통해 시스템 상태를 추정하여 누수탐지를 수행하였다. Hagos et al. (2016)는 상수도시스템 내 관 파손 탐지를 위해 최대의 탐사 효율을 보이는 계량기 위치 및 종류를 파악하기 위한 방법론을 제안하였다. 또한 Santos-Ruiz et al. (2020)은 정상 및 사고 데이터에 대한 압력 잔차를 기반으로 KNN 분류기 및 방향 코사인을 통해 누수위치를 특정하여 그 성능에 대해 평가한 바 있다. Min et al. (2022)은 누수 감지와 발생 위치 파악을 위해 K-mean clustering과 시행착오 최적화를 통해 누수탐사성능을 평가한 바 있으며 Steffelbauer et al. (2022)는 각 절점 간 압력차의 피어슨 상관계수를 통해 누수위치를 특정하였다. 하지만 누수탐사를 수행하는 대부분의 연구는 누수의 발생위치와 발생 후 빠른 누수 유무에 대한 인지를 목표로 하기 때문에 발생한 누수에 따라 누수여부와 발생위치, 발생한 누수의 정량적인 규모를 판단할 수 있는 누수탐사 기법에 대한 연구가 부족한 실정이다. 또한 네트워크 내 설치되는 계측기의 개수, 설치 위치 등에 따른 누수탐사 성능분석에 대한 연구가 이루어진다 하여도, 이는 동일하게 누수위치 및 인지에 초점이 맞추어져 있기 때문에 누수위치 뿐만 아니라 누수 규모를 판단할 수 있는지에 대한 여부가 모호하다.
따라서 본 연구에서는 수리해석 모형을 활용하여 누수발생 인지와 함께 누수발생 위치, 그에 따른 규모를 탐지할 수 있는 데이터 기반의 누수탐지 기법을 제안한다. 제안된 기법은 모의 누수사고 시나리오를 통해 발생가능한 누수규모와 누수위치를 고려하여 수리결과(i.e., 압력, 유량, 유속) 등을 학습데이터로 사용한다. 이를 머신러닝 기법 중 Deep neural network (DNN) (Schmidhuber, 2015)을 통해 누수를 탐지하여 그 성능을 평가하였다. 또한, 제안된 방법론의 검증을 위해 임의로 구성한 가상 관망을 통해 관망의 형태 및 규모에 따른 누수탐지 성능과 상수도시스템 내 계측기 종류에 따른 누수탐사 모델의 성능을 분석하였다. 또한 선정한 계측기 개수 및 위치에 대한 누수탐사 효율을 분석하여 해당 모델에서 가장 높은 효율을 갖는 계측기의 종류 및 위치와 개수를 제안하였다.
2. 모의 누수 사고 시나리오 구성방법 및 탐지기법
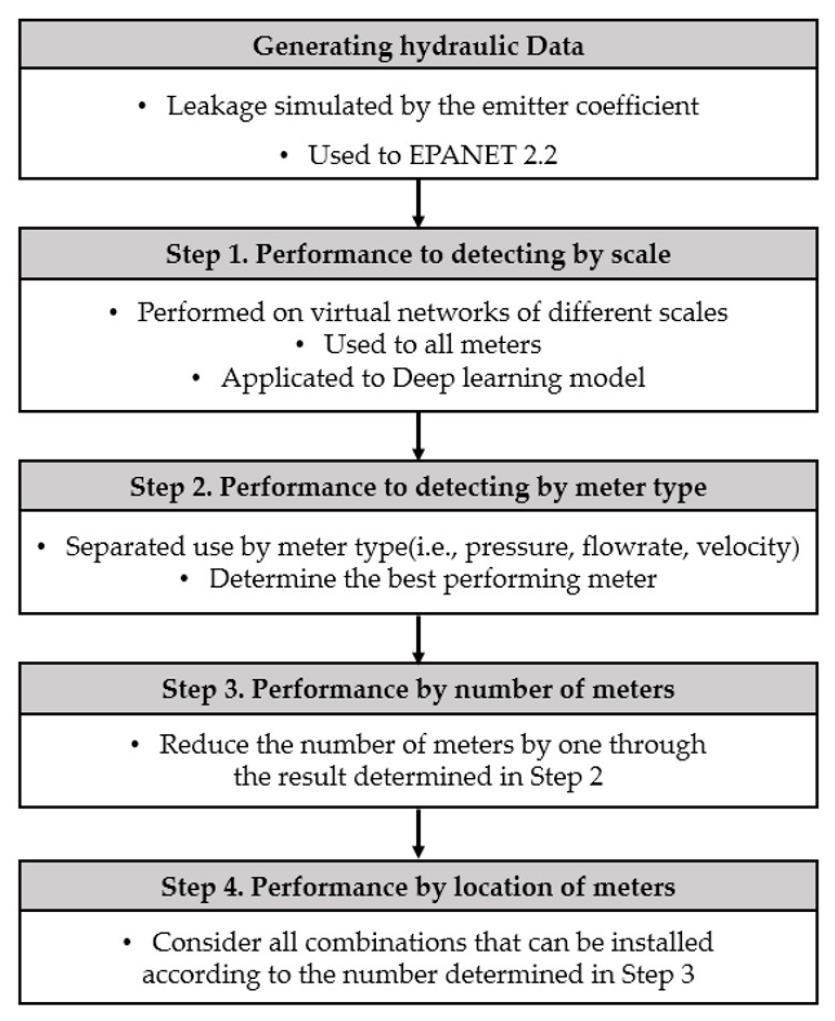
모의 누수사고 시나리오를 고려하여 누수탐사를 수행하기 위한 방법론은 Fig. 1과 같다. 우선 본 연구에서는 수리해석 모형인 EPANET 2.2(Rossman, 2000)을 이용하여 정상데이터와 최대 누수규모를 기준으로 누수규모를 줄여가며 모의 누수사고 시나리오를 구성하고 정상데이터와 취합하여 학습 데이터를 구성하였다. 모의 누수사고 시나리오를 적용할 때, 네트워크의 규모에 따른 정량적인 누수탐지 성능 비교를 수행하기 위해 Grid-network를 사용하였다. 이 후 누수탐사에 있어 모델의 성능에 높은 영향을 미치는 계측기의 종류 및 개수를 파악하여 상관관계 분석을 수행하였으며 선정된 개수에 따라 최적의 계측기 위치를 결정한다.
2.1 모의 누수 사고 시나리오 구성
본 연구에서는 수리해석 모형을 사용하여 데이터 기반으로 누수를 탐지하는 기법을 제안한다. 누수탐사를 위한 데이터는 누수위치 및 누수규모에 따른 다양한 모의사고 데이터를 획득하는 것이 필수적이다. 따라서, 누수 모의를 위한 정상 데이터 및 사고 데이터의 구성하고, 각 시나리오를 고려하여 EPANET 2.2를 활용한 모의누수에 따른 수리해석결과(i.e., 수압, 유속, 유량)를 획득하였다. 우선, 프로그램에서 누수탐사를 위한 데이터 구축 중 정상 데이터의 경우 Demand multiplier에 따른 압력 및 유량, 유속을 통해 정상 수리해석 데이터와 누수발생 시 사고 데이터를 구축하기 위해 모의사고 시나리오를 통해 사고를 모의하여야 한다. 이는 검보정이 완료된 상수도시스템의 수리해석 모형을 이용하여 운영관리자가 확인하고자 하는 관 파손사고의 위치 및 크기의 영향을 모의할 수 있다(Jun and Choi, 2022). 임의적인 누수 모의를 위해 EPANET 2.2 프로그램 내 Emitter 기능을 활용하였다. 본 연구에서는 누수의 규모를 고려하기 위해 다양한 Emitter coefficient를 적용하였으며, Emitter를 활용한 절점의 누수모의는 Eq. (1)과 같다.
여기서,
q : 누수량 (Leak volume)
p : 압력 (Pressure)
C : Emitter Coefficient
: Emitter Exponent (0.5)
모의한 누수의 형태는 파열 누수로써, 파열 누수를 모의하였다. K-water (2009)는 50 m 이상의 압력에서 0.25 m3/h 이상을 파열 누수로 결정한 바 있다. 이에 따라 파열 누수가 발생한 사고 데이터를 구성하기 위해 최대 누수량을 각 절점의 수요량 1/3로 가정하였다. 누수규모 산정을 위해 사용되는 Eq. (1)에서 r는 0.5를 사용하였다(Yoo et al., 2014). 또한 누수가 발생했을 때 관망에서 보다 현실적인 수리해석 결과를 위해 압력 기반 시뮬레이션을 수행하였다. 수요량 기반 시뮬레이션은 절점의 압력과 무관하게 항상 수요량이 공급된다는 가정을 가지기 때문에 관 파괴, 화재 발생 등과 같은 비정상상황에서의 수리해석 시 비현실적인 결과를 가져올 수 있다(Gupta and Bhave, 1996; Tanyimboh and Tabesh, 1997). 하지만 압력 기반 시뮬레이션은 절점의 압력에 따라 실제 수요량이 변화한다는 가정을 가지며, 이에 따라 비정상상황에 대한 수리해석 시, 수요량 기반 시뮬레이션보다 비정상상황에 대해 더욱 현실적인 해석이 가능하다. 본 연구에서 압력 기반 시뮬레이션의 수행을 위해 사용되는 압력과 수요량에 따른 관계식(Wagner et al., 1988)은 Eq. (2)와 같다.
여기서,
d : 실제 수요량
Df : 희망 수요량
Pf : 요구 압력(30 psi, 21.097 m)
P0 : 최소 압력(5 psi, 3.516 m)
1/e : 압력 지수(0.5)
2.2 Deep Neural Network
누수탐지를 위해 구축된 데이터를 학습하기 위한 모델은 Deep learning 기법 중 DNN을 선정하였다. 누수탐사를 위해 구성된 학습 데이터는 Demand multiplier에 따라 각각의 데이터가 생성되며 이는 절점 및 관로의 개수와 구성하는 Emitter coefficient의 개수에 따라 데이터 양이 많아진다는 것을 의미한다. DNN 기반 누수 탐지 모델에서의 각 은닉층에서 활성화 함수로 Rectified Linear Unit (ReLU)를 적용하였다. Sigmoid 및 Tanh 함수는 역전파 과정에서 입력층으로 갈수록 기울기가 소실되는 현상인 Gradient vanishing 현상이 발생할 수 있다. 이를 해결하기 위해 본 모델에서는 ReLU 함수를 적용하였다. ReLU는 Eq. (3)과 같이 표현된다.
Eq. (2)의 x가 0보다 크면 기울기가 1인 직선, 0보다 작으면 함수 값이 0이 되는 함수이다. 또한 ReLU 함수는 타 함수들에 비해 연산이 간단하기 때문에 학습속도가 빠르다는 장점이 있다. Deep learning 모델을 사용해 학습을 수행할 때 각 뉴런들의 가중치는 일정 구간 내 랜덤하게 설정된다. 이에 따라 오차역전파 과정에서 미분한 Gradient가 지나치게 커지거나 소실되는 문제에 빠질 위험성이 크다. 이 문제점을 해결하기 위해 Deep learning 모델을 대상으로 가중치 초기화를 적용하였다. ReLU 함수에 적합한 가중치 초기화 방법인 He Initialization (LeCun et al., 2002)은 Xavier Initialization (Glorot and Bengio, 2010)을 개선한 가중치 초기화 방법으로 정규 분포에서 생성된 가중치를 입력 개수의 절반으로 나누어 주며 초기화한다. ReLU 함수에서 입력이 음수일 시 출력이 전부 0이기 때문에 He Initialization을 적용할 시 높은 성능을 기대할 수 있다. He Initialization은 개발된 모델의 각 은닉층에 적용하였다.
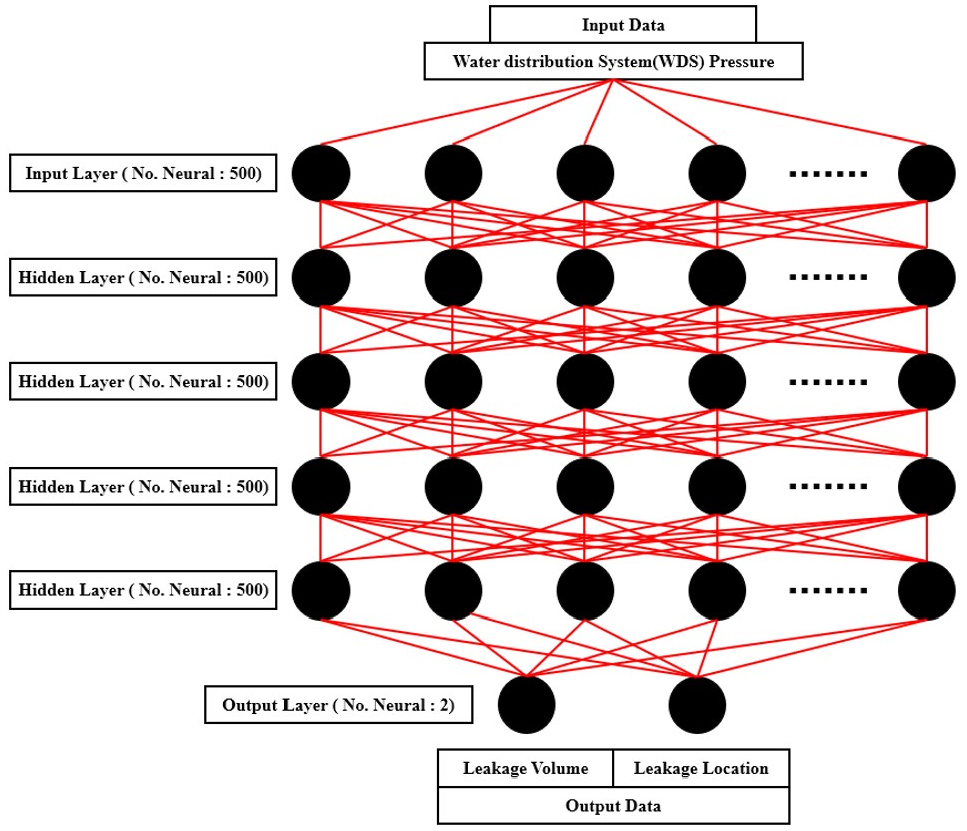
개발된 DNN 기반 누수탐사 모델은 1개의 입력층과 4개의 은닉층, 1개의 출력층으로 이루어져 있으며 입력층 및 은닉층은 각 층에서 200개의 뉴런을 가지고 있으며 출력층은 2개의 뉴런으로 이루어져 있다. Fig. 2는 개발된 DNN 모델의 구조를 나타낸 것이다. 학습을 수행함에 있어 최적 함수 Adam (Kingma and Ba, 2015)의 Learning Rate를 0.001로 적용하였으며 50,000회 반복하여 학습을 수행하였다. 과적합 방지를 위해 3,000번동안 학습이 개선되지 않을 시 학습을 중단하였으며 구성된 정상 및 사고 데이터는 MinMaxScalar를 적용하였다. MinMaxScaler 정규화는 Eq. (3)과 같다. 압력 및 유량과 같이 누수에 따라 다른 변동을 가지는 데이터들의 Feature를 통일해주기 위하여 정규화를 적용하였으며 이는 모델의 학습 속도 향상에도 유리함을 갖는다.
3. 적용 및 결과
정상 데이터 및 사고 데이터는 DNN 기반 누수탐사 모델에 적용하여 각 세부사항에 따라 결과를 분석하였다. 임의로 구성된 가상 관망에 모의 누수사고 시나리오를 적용 후 누수탐사를 수행하였고, 총 3가지의 경우로 구분하여 그 결과를 비교하였다.
Step. 1: 가상 관망의 규모 별 누수탐사 성능
Step. 2: 가상 관망의 계측기 종류 별 누수탐사 성능
Step. 3: 가상 관망에서 계측기 개수 및 위치에 따른 누수탐사 성능
3.1 적용 관망: Grid-networks
Fig. 3은 누수탐사를 위해 구성한 가상 관망이다. 격자자형태를 가진 가상 관망은 각 절점 및 관로의 개수를 다르게 하여 여러 가지로 구성하였다. 규모에 따른 누수탐사 모델의 성능만을 비교하기 위해 Grid 형태로 구성하였으며 각 절점의 기본 수요량은 9.49 m3/h을 가진다. 모의하고자 하는 누수는 파열누수이기 때문에 최대 누수량을 약 1/3로 가정하여 약 0.3 m3/h를 최대 누수량으로 가정하였다. 이에 따른 최대 Emitter coefficient는 0.8을 적용하였다. 또한 Emitter Coefficient 적용 간격을 0.1로 하여 0.1부터 0.8까지 순차적으로 각 절점에 모두 적용하여 누수를 모의하여 시나리오를 구성한다. 이는 절점의 개수가 많아질수록 모의하는 시나리오의 개수가 많아진다는 것을 의미하며 시나리오의 개수는 Eq. (5)와 같다. 구성된 가상관망의 Hazen-William 마찰계수는 130을 적용하였으며, 관로의 길이는 4 m, 관경은 350 mm으로 절점수를 기준으로 2×2, 3×3…, 10×10 등의 격자형 관망 총 9개를 구성하였다. Table 1은 가상 관망의 절점 및 관로의 개수와 고려한 누수 시나리오의 개수와 Emitter coefficient의 최대값 및 최소값을 나타낸다.
수리해석을 통해 얻어지는 정상 데이터 및 사고 데이터는 Table 2와 같은 형태를 가진다. Table 2(a)는 누수를 모의하지 않은 정상 데이터의 예시이다. Ob1~n은 수리해석 후 Time series에 따른 수리해석 결과(i.e., 압력, 유량, 유속)을 의미하며, 우측의 Lloc 및 CE는 누수모의를 위한 매개변수를 의미한다. Lloc는 누수가 발생한 절점의 번호를 의미하며 CE는 Lloc의 번호에 적용된 Emitter coefficient를 의미한다. Table 2(a)는 누수가 발생하지 않은 정상 데이터를 의미하기 때문에 누수위치를 의미하는 Lloc가 0을 나타내며 CE 또한 누수가 발생하지 않은 상태이기 때문에 0을 나타낸다. Table 2(b)는 누수를 모의한 사고 데이터의 예시이다. 우측의 Ob1~n은 누수 발생 후 수리해석을 수행하여 얻어진 수리해석 결과를 의미한다. 우측의 Lloc와 CE는 누수모의를 위한 매개변수이기 때문에, 정상 데이터와는 다르게 절점의 번호를 의미하는 Lloc가 누수가 발생한 절점의 번호를 나타내게 되며, CE는 Lloc에 해당하는 절점에서 발생한 누수의 규모를 의미하는 Emitter coefficient를 나타내게 된다. DNN 기반 모델을 통해 누수탐사를 수행할 시, 위의 데이터 예시에서 좌측의 Ob1~n의 수리해석 데이터가 Input data로써 사용되며, 누수위치 및 누수규모을 의미하는 Lloc 및 CE가 Output data로써 나타난다.
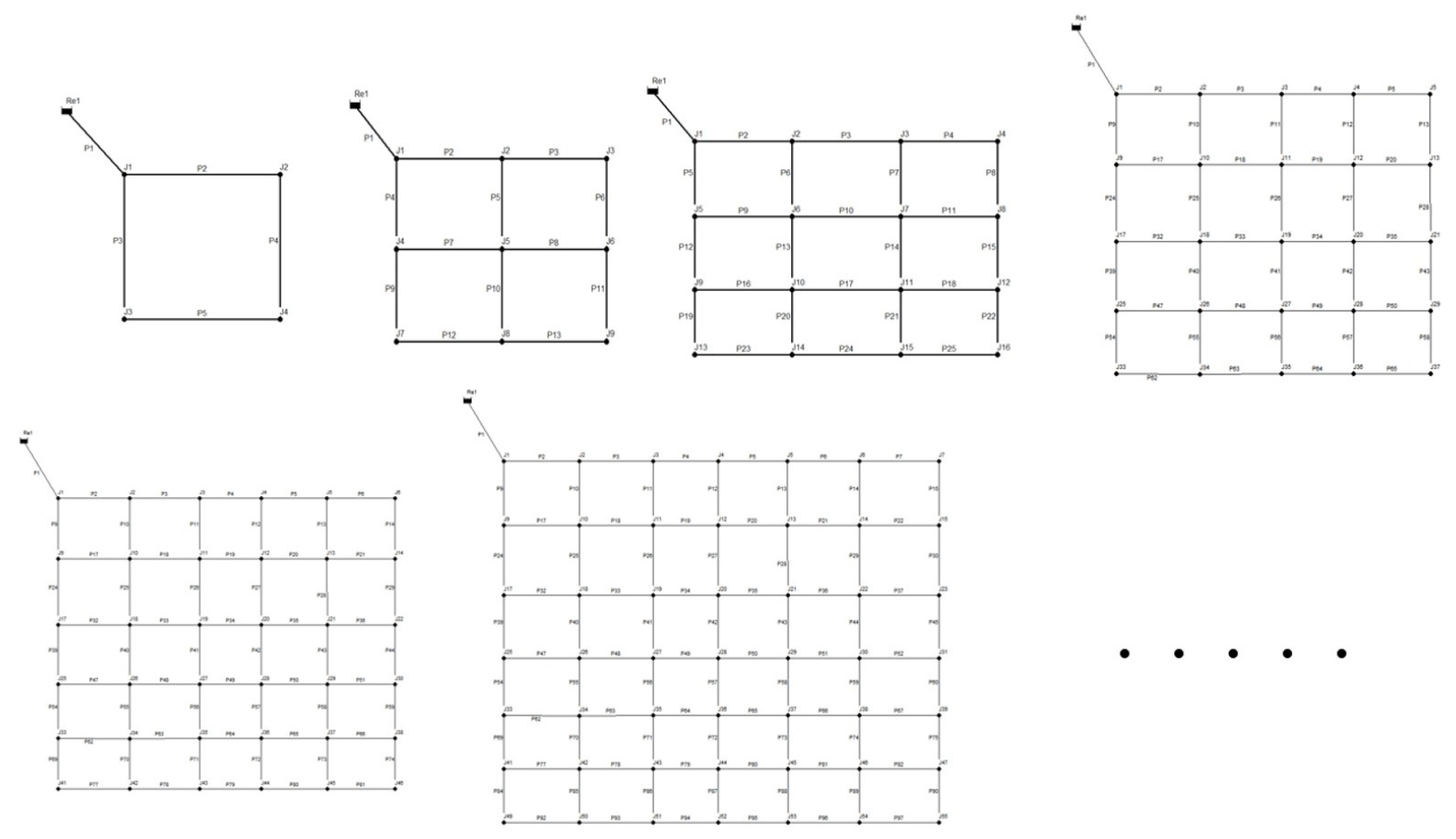
Table 1.
Information of Grid networks
Table 2.
Example of normal data (a), abnormal data (b)
3.2 가상 관망의 규모 별 누수탐사 성능
누수 모의를 위한 네트워크에서 규모에 따른 누수탐사 모델의 성능을 파악하기 위해 절점과 관로의 개수를 다르게 한 Fig. 3의 가상 관망의 누수탐사 학습 정확도 및 오차율은 Table 3과 같다.
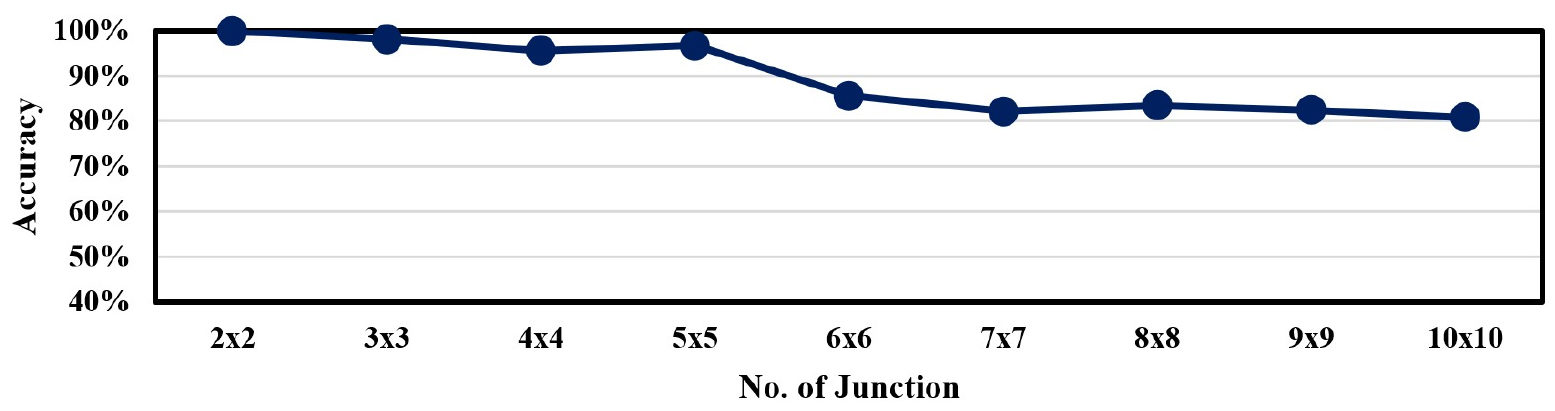
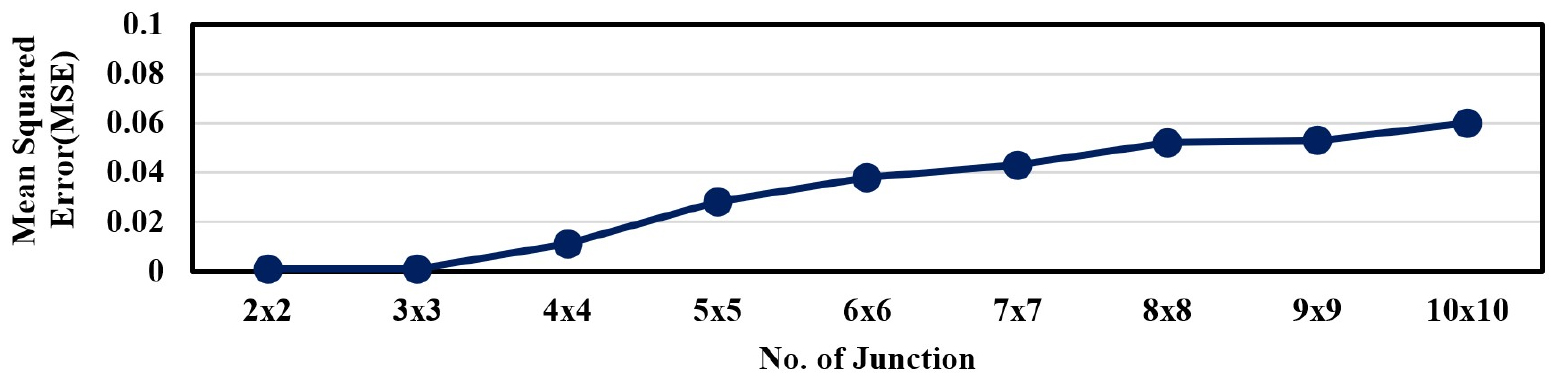
절점 4개를 가진 Grid network (2×2)부터 절점 100개를 가진 Grid network (10×10)까지 총 9개 네트워크에서 각각 누수탐사를 수행하였다. 오차는 Mean squared error (MSE)를 사용하여 학습 수행 후 누수탐사 결과에 따른 예측 오차를 판단하였다. 검증을 위해 생성된 시나리오 중 70%를 학습에 사용하였으며 15%를 학습 검증 데이터, 15%를 테스트 데이터로 활용하여 평가하였다. 각 가상 관망에 따른 시나리오 개수와 탐지 정확도 및 오차는 Table 3과 같으며 Fig. 4는 누수탐사 모델의 규모에 따른 정확도를 비교한 그래프이다. 학습 정확도는 Grid network (5×5)까지 평균 0.975의 정확도를 보이지만 절점의 개수 36개를 가진 Grid network (6×6)부터 절점의 개수 100개를 가진 Grid network (10×10)까지 평균 0.829의 학습 정확도를 보였다. 현재 개발된 누수탐사 모델은 원활한 데이터의 학습을 위해 최대값을 1, 최소값을 0으로 변환해주는 정규화를 적용해주었는데, 그에 따라 네트워크 내 절점의 개수가 많을수록 정규화 과정을 거친 절점의 번호들을 예측할 때, 작은 오차에도 절점의 번호가 다르게 나타날 수 있다. 이와 같은 원인이 누수탐사 모델의 성능을 저하시키는 것으로 판단되며 이는 곧 규모에 따라 성능이 저하된다는 것을 의미한다. Fig. 5는 누수탐사 모델의 규모에 따른 오차를 비교한 그래프이다. Grid network (3×3) 다음부터 오차가 계속 가파른 상승을 보이지만 Grid network (8×8)부터 다시 상대적으로 완만한 상승을 보인다. 이는 절점의 개수가 일정 수를 초과할 시 누수탐사 성능에 큰 차이를 보이지 않는다는 것을 의미한다. 누수탐사 모델의 성능은 규모에 따라 성능이 저하되는 경향을 보이지만, 이는 모델의 하이퍼 파라미터의 최적화를 통해 모델의 성능 개선이 가능할 것으로 보인다.
Table 3.
Performance evaluation according to network scale
3.3 가상 관망의 계측기 종류 별 누수탐사 성능
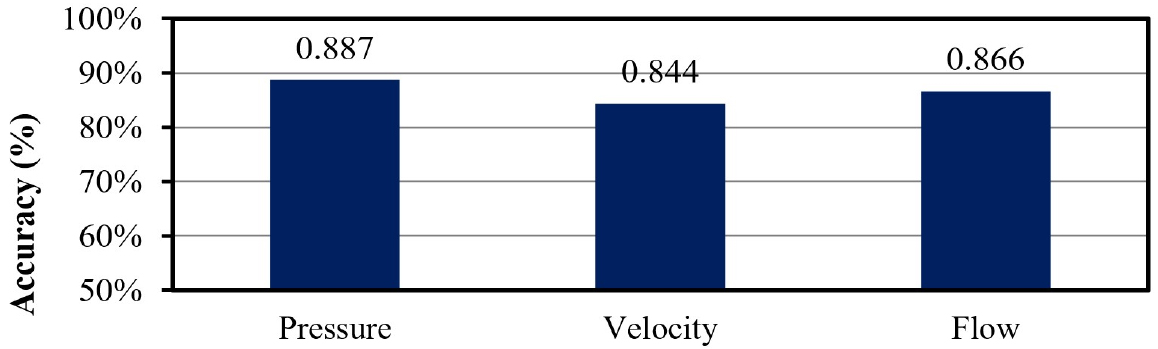
계측기의 종류 별 성능평가를 위해 가상 관망 중 절점 16개와 관로 25개를 가진 Grid network (4×4)를 대상으로 하여 압력계, 유속계, 유량계 데이터를 독립적으로 사용하여 누수탐사를 수행하였다. 계측기 종류 별 학습 정확도는 Fig. 6과 같다. Fig. 6에서 압력계, 유속계, 유량계 중 가장 높은 학습 정확도를 가진 계측기는 88.7%의 학습 정확도로 누수탐사가 가능했던 압력계이며 유속계를 단독으로 학습하였을 때 가장 낮은 84.4%의 학습 정확도를 나타냈다. 이와 같은 결과는 상수도시스템 내 누수가 발생할 시 타 데이터에 비해 압력의 변화가 더 민감하기 때문에 누수탐사를 수행할 시 타 계측 데이터에 비해 높은 성능을 나타내는 것으로 보인다. 이 후 가장 높은 학습 정확도를 보인 압력 데이터를 통해 계측기 개수 및 위치에 따른 누수탐사 모델의 학습 정확도를 분석하였다.
3.4 가상 관망에서 계측기 개수 및 위치에 따른 누수탐사 성능
가장 높은 학습 정확도를 얻을 수 있던 계측기인 압력계는 Grid network (4×4)에서 압력 데이터를 절점 하나씩 소거하여 계측기 개수에 따른 학습 정확도를 비교하였다. 이에 따른 결과는 Fig. 7과 같다. 계측기 개수가 15개부터 2개까지 큰 변화가 나타나지 않지만 1개의 계측기를 사용하여 데이터를 얻어 학습을 수행하였을 때 약 45%에 해당하는 학습 정확도를 보였다. 이는 누수탐사를 수행할 때 최소한의 상관성을 가질 수 있는 2개의 계측기가 존재할 때, 누수탐사의 효율성을 높이는 것으로 판단된다. 따라서 최소한의 계측기 개수로 선정된 2개의 계측기가 Grid network (4×4) 절점의 개수인 16개 절점에 설치될 수 있는 모든 경우의 수인 16C2개의 경우에 따라 모두 학습을 수행하여 계측기 개수에 따른 위치 분석을 수행하였다. 분석 결과는 Fig. 8과 같다.
계측기 2개만을 사용하여 학습을 수행하였을 때 가장 높은 학습 정확도를 보인 계측기의 배치와 가장 낮은 학습 정확도를 보인 계측기의 차이는 0.078로 평균 82.1%의 학습 정확도로 누수탐지가 수행되었다. 높은 성능을 보인 계측기 배치의 경우 계측기의 설치된 거리가 멀수록 상대적으로 높은 성능을 보였다. 이는 계측기끼리 거리가 멀 때 각 계측기의 관측 값에서 보여지는 상관성이 학습에 유리함을 주는 것으로 판단된다. 이 후 Grid network (4×4)에서 최적의 계측기 위치로 선정된 절점 J1과 J15의 압력 데이터를 얻어 누수탐사를 수행하였다. 학습성능의 평가를 위해 1개의 정상상태 시나리오와 15개의 누수 시나리오를 적용하여 검증을 수행하였다. 이에 따른 결과는 Table 4와 같다. 해당 모델로 16개의 누수탐사 시나리오를 적용하여 모델의 성능을 검증한 결과, 누수규모(Emitter coefficient)에서는 37.50%의 탐지성능을 보였지만 누수위치 탐사에 있어 93.75%의 누수위치 탐사 결과를 보였다. 최소한의 계측기로 누수탐사를 수행하였기에 누수규모(Emitter coefficient)의 탐지보다 누수 위치의 탐사가 더욱 유리한 것으로 나타났다. 또한 1개의 정상 시나리오를 포함하여 누수탐사를 수행한 결과, 오측이 발생하지 않았다. 이는 누수탐사를 수행할 시 누수가 발생하지 않은 정상상태에서의 오경보 확률이 낮음을 의미한다.
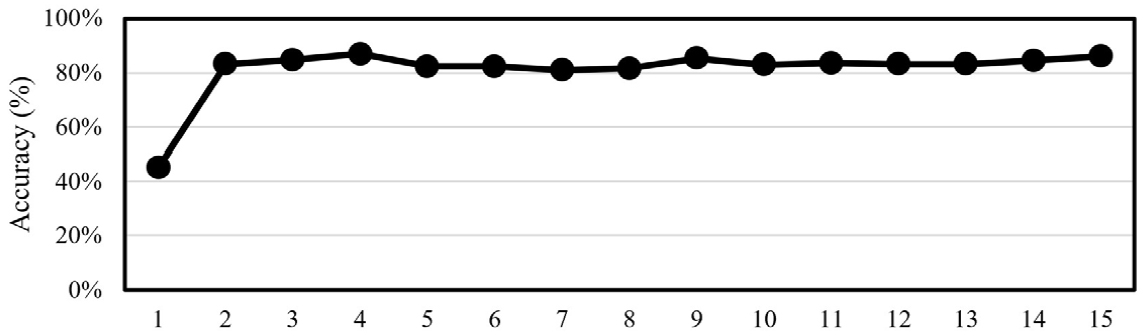
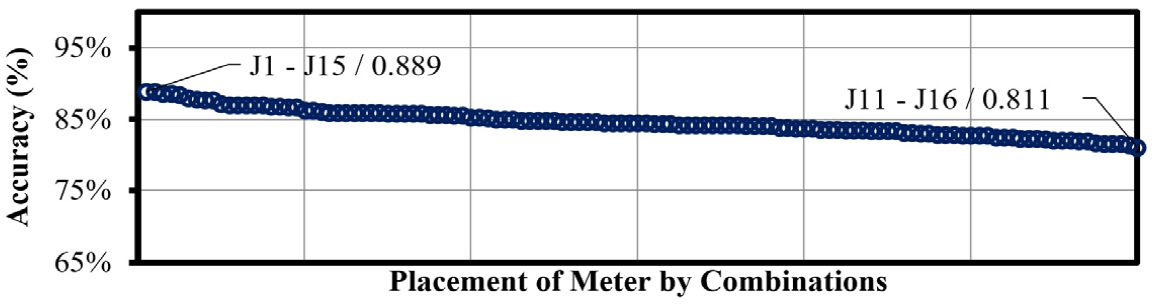
Table 4.
Detection result for leakage scenario
4. 결 론
본 연구에서는 누수 탐사를 위한 모의 누수사고 시나리오 생성 방법과 구성된 데이터를 누수탐사로 활용할 수 있는 기법을 제안하였다. 제안된 기법은 수리해석 모델 EPANET 2.2 프로그램을 활용하여 모의 누수사고 시나리오를 생성하였으며 모든 절점에 다양한 값의 Emitter coefficient를 적용하여 누수규모에 따른 여러가지 시나리오 생성이 가능했으며, 이를 통해 DNN 기반 모델로 성공적인 Pinpoint 누수탐사를 수행할 수 있었다. 개발된 모델을 통해 절점 및 관로의 개수를 다르게 하여 임의로 구성한 9가지의 가상 관망을 통해 규모에 따른 성능평가를 실시하였다. 결과적으로 계측기 종류에 따른 누수탐사 효율과 그에 따른 계측기 데이터의 개수 및 최적의 설치 위치 또한 선정할 수 있었다. 누수 탐사에 있어 네트워크의 규모에 따라 성능이 저하되는 정도를 정량적으로 평가하였으며 계측기 종류 중 압력계를 통해 누수 탐사를 수행했을 시 가장 높은 누수 탐사 정확도를 얻을 수 있었다. 또한 절점 및 관로 각 16개와 25개를 가진 가상 관망에서 누수 탐사를 위한 최소한의 계측기 개수는 2개로 선정되었으며 압력계의 민감도 내 계측기의 거리가 멀수록 상대적으로 높은 성능을 보였다. 이는 네트워크의 크기에 따라 상이한 결과를 가질 것으로 보인다. 개발된 모델을 통해 네트워크에서 실시간으로 얻어지는 데이터를 통해 누수 탐사가 가능할 것으로 보이며 현재 고려된 압력 데이터의 독립적인 사용이 아닌 유량 데이터 및 탱크의 수위와 같은 타 상수도시스템 시설물에서 얻어지는 데이터를 조합하여 학습 데이터를 구성할 시 더욱 높은 정확도를 가질 것으로 예상된다.
본 연구에서는 누수탐사 모델의 성능평가를 위해 가상 관망을 대상으로 누수탐사를 수행하였다. 대상이 되는 가상 관망은 검보정이 완료된 관망이라는 전제를 가지며 이는 네트워크 구성요소가 정해진 수요량과 설정된 물리적 인자를 바탕으로 누수 모의 시나리오를 생성하였다는 것을 의미한다. 하지만 실제 운영되는 상수도 관망은 최종 수요량, 실제 관내 거칠기 등 다양한 불확실성을 가지며 학습에 사용된 데이터는 실제 운영상황과는 차이가 존재한다. 이에 따라 향후 연구에서는 관망 내 불확실성을 가지는 데이터(i.e., end-user demand, roughness)와 데이터의 측정 오차 등을 포함한 데이터를 사용하여 누수탐사를 수행했을 시, 성능변화에 대한 정량적인 평가와 오경보 확률 등 다양한 인자를 포함하여 성능평가 및 모델을 보완할 시 실제 운영상황과 유사한 경우에도 모델의 사용이 가능할 것으로 보이며 누수발생 후 누수 지속시간에 대한 탐지 등 추가적인 연구가 필요할 것이다. 현재 누수탐사를 위해 모의된 관망은 모두 Grid 형태로써 Loop의 특성을 가진다. 이는 Branch형 관망과 같이 타 형상을 갖는 관망의 경우 누수탐사에 있어 상이한 성능을 보일 수 있다. 이에 따라 타 관망의 형태에 따른 누수탐사 성능에 대한 민감도 분석이 이루어져야 할 것이다.
