

1. 서 론
2. 연구 방법
2.1 초분광수심법(Hyperspectral Bathymetry Method)
2.2 최대측정가능수심(Maximum Measurable Depth)
3. 현장 실험
3.1 대상하천 개요 및 실측수심 조사
3.2 초분광영상 취득
4. 결과 분석
4.1 OBRA 및 초분광 영상 기반 수심맵 산정 초기 결과
4.2 최대추정가능수심을 고려한 수심맵 개선
5. 토 의
1. 서 론
하천 지형은 하천의 유지와 관리, 하천 수공구조물의 설계와 보수, 수생태 조사 등을 위해 필수적인 자료이며, 유량, 유속 등과 더불어 하천의 특성을 이해하기 위한 주요 관측항목 중 하나이다(Muste et al., 2009; Benjankar et al., 2018; Tonina et al., 2019; Kasvi et al., 2019). 국내의 경우, 2010년 대규모 준설을 수반한 대하천 정비사업(Cha et al., 2011; Jun and Kim, 2011; Lah et al., 2015) 이후 자연적 안정화를 위한 추가 재퇴적 및 침식이 진행 중에 있어 정밀 하상 모니터링이 요구되고 있다(Ji et al., 2015; Kim and Kim, 2020). 최근 개정된 하천법은 주요 대하천의 경우 하천 구조물 상하류, 지류 합류부, 취수시설물 설치구간 등 퇴적 및 세굴 발생이 예상되는 구간에 2년 주기로 정밀 하상 측정을 실시하되, 하상변동이 빈번하다고 판단되는 지역은 1년마다, 하상변동이 작은 곳은 5년 주기 조사를 법제화하였고(River Act, 2016), 내성천과 같은 주요 지천의 변동도 영주댐 건설 이후 주목받고 있다(Lee et al., 2019a; 2019b). 그러나, 지속적인 하상모니터링 수요의 증가에 비해 통상적인 하상조사기법들은 이러한 수요를 충족시키는 데 한계가 있다. 이들은 고비용이 소요되는 단면 측정 위주로 점단위 직접 수심을 측정하는 방법인 토탈스테이션 혹은 레벨측량(Koljonen et al., 2012), RTK GPS (Real Time Kinematic GPS)등을 활용한다(Brasington et al., 2000). 게다가 현장요원의 하상접촉으로 사질하천에서 사구나 사련 등 상세 하상구조를 교란시킬 위험이 있다(Kasvi et al., 2019). 수심이 깊을 경우 ADCP (Acoustic Doppler Current Profiler)등 음향측심기법들이 활용되고 있는데 재래식 방법에 비해 대폭 개선된 효율성으로 활용도가 증가하여 대하천 하상변동에 주로 활용되고 있다(Guerrero and Lamberti, 2011; Flener et al., 2015; Kasvi et al., 2017; Parsapour-Moghaddam et al., 2019). 그러나, 음향측심기법도 기본적으로 점단위 측정으로 대하천 단면수심측정에 사용되고 있고 면단위 하상을 위해 추가적인 보간이 필요하다. 그리고, 고가의 운용장비 비용으로 범용성 제약과 결정적으로 막음길이(blanking distance) 및 바닥면 노이즈(side-lobe) 등으로 대략 30~40 cm 이내의 저수심 측정이 불가하다(Yorke and Oberg, 2002). 따라서, 본류 저수심 퇴적구간이 측정에 한계가 있고 평수기 저수심의 중소하천 등에 적용되지 못하고 있다(Westaway et al., 2003; Guerrero and Lamberti, 2011; Alvarez et al., 2017).
한편, 지점단위의 통상적 직접 하상변동 조사기법에 비하여 효율성을 제공하기 위해 최근 원격탐사 중심의 비접촉식 면단위 하상측정기법들이 대안적인 수심 계측 기술로 검토되고 있다(Fausch et al., 2002; Mertes, 2002; Fonstad and Marcus, 2010). 대표적인 원격탐사 수심측정기법으로 영상기반 수심 SfM (Shintani and Fonstad, 2017; Kasvi et al., 2019), Green 밴드를 활용하는 수심 라이다(Bathymetric LiDAR, McKean et al., 2014; Pan et al., 2015; Zhao et al., 2017; Kasvi et al., 2019), 초분광수심법(Hyperspectral Bathymetry Method, Lyzenga, 1978; Stumpf et al., 2003; Legleiter et al., 2009) 등이 있다. 이러한 기법들은 최근 약 5 년 전부터 드론의 급속한 보급으로 경제성이 있는 저고도 고해상도 수심측정 측면에서 종래의 접촉식 수심측정 기법을 대체하거나 보완할 수 있는 방법들로 각광을 받기 시작하였다. 관련해서, 최근 관심은 다양한 하천환경에서 이러한 신규 기법들의 성능을 점검하여 기존 재래식 방식들을 대체 혹은 보완할 수 있는 실무 적용성을 검토하는 데 있다. 원격탐사 수심측정기법들 자체도 지속적으로 하드웨어나 후처리기법의 고도화를 통해 진화하고 있고, 개발된 기법들도 실제 하천환경에 적용되었을 때 수심측정 정확도, 공간해상도 및 측정 효율성, 최대 혹은 최소 측정 가능수심 등을 계량화하는 작업을 후속으로 수행 중에 있다. 본 연구는 이중 최근 조명받고 있는 초분광수심법 중 가장 보편적인 최적밴드비분석법(Optimal Band Ratio Analysis, 이하 OBRA, Legleiter et al., 2009)의 적용성을 국내 대하천을 대상으로 검토하고 측정 제원을 산정하고자 하였다.
150 개 이상의 상세 파장대 정보를 가진 초분광 영상은 과거 주로 위성이나 항공기에 탑재되어 다양한 분야의 원격탐사에 활용되기 시작하였고(Legleiter, 2014), 수심 측정에 대한 적용성, 초분광 센서의 해상도에 따른 영향성 평가, 초분광 영상을 활용한 수심 측정 절차와 방법이 개발되어 왔다. 최근 초분광수심법은 계산부하가 큰 100 개 이상의 파장대 정보를 모두 활용하는 대신, 수심 추정에 적합한 최적화된 밴드비를 이용하여 수심을 추정할 수 있는 최적밴드비분석법(OBRA)가 개발되어 수심 측정 성능 및 경제성을 획기적으로 개선시켰다(Legleiter et al., 2009). OBRA는 수심과 상관성이 높은 특정 파장 혹은 복수의 파장대의 최적조합을 지수로 실측수심과의 최적관계식 구축을 통해 수심을 추정하는 기술로, 기존 광학기반 수심추정 기법들이 수중으로의 투과, 흡수, 반사되는 과정을 물리학적으로 모형화한 방정식에 기반하다보니 각종 하천 계수 값들이 필요하여(Mobley,1999; Mobley and Sundman, 2001) 발생한 실용성 측면의 한계를 극복한 방식이다. 한편, 현재까지 초분광 기반 하천수심 측정 연구는 기존 위성이나 유인항공기 플랫폼 기반일 때 고비용, 저해상도, 낮은 재방문주기 등 한계로 상대적으로 공간적 규모가 작은 하천까지 적용상 한계가 있었으나, 저비용, 고해상도, 간편한 측정이 가능한 드론(UAV)과 이에 탑재할만큼 초분광 카메라가 소형화/경량화되고, 저비용(본 연구의 경우, 5천만원 상당)으로 개량되어 대중화를 목전에 두고 있다고 판단된다.
사실 지금까지 초분광수심법 중 OBRA 기법은 주로 유인항공기 탑재 초분광 카메라를 기반으로 적용성이 검토되어 왔다(Legleiter et al., 2009). 그러므로, 다음의 몇 가지 측면에서 적용성을 추가 검토할 필요가 있다. 우선, 고정밀의 UAV에 탑재되어 국내 대하천 현장에 적용된 사례가 없었다. 주로 Legleiter et al. (2019b)은 상대적으로 탁도가 낮고 조립질 하천인 콜로라도강에서 유인항공기를 기반으로 적용성을 점검하여 사구와 같은 상세하상 측정과 무관하고 평수기 탁도가 높은 사립질 하천인 국내 하천환경과 부합성에 한계가 있으므로 국내 환경에서 적용성이 재검토되어야 할 것이다. 초분광수심법의 대하천 실무 적용을 고려할 경우 주요 관심 중 하나가 수심 적용 범위(최소 및 최대측정가능수심; Minimum and Maximum Measurable Depth)일 것이다. 낙동강 등 주요 국내 대하천이 최심부에서 5-6 m로 형성되는 수심분포에서 초분광수심법이 측정가능한 최대수심 확인이 성능평가의 우선순위에 있다. 초분광수심법의 저수심부 성능에 대해서는 You (2018)이 수심이 10 cm~1 m 내외의 감천에서 드론 탑재 OBRA기반 초분광수심법이 7 cm 공간해상도로 사구 등 상세지형 계측이 가능하다고 제시한 바 있다. 참고로, 수심 라이다(Bathymetric LiDAR)는 50 cm 미만의 저수심 측정이 어렵고 최대측정가능수심 범위는 2 m 정도로 보고되고 있다(콜로라도강 적용사례; VQ-880-G LiDAR, Legleiter et al., 2019b).
본 연구는 국내 대하천인 낙동강의 평수기 전형적인 탁도조건(약 10 NTU)에서 초분광수심법을 적용하고 최대측정가능수심을 측정하는 방법 및 결과를 제시하여 국내 하천으로의 적용성을 평가하고자 한다. 초분광수심법의 최대측정가능수심으로 Legleiter et al. (2018)은 맑고 탁도가 낮은 콜로라도강 사례에서 대략 3.57 m를 최대측정가능수심으로 제시한 바 있는데, 최대측정가능수심을 위해 적용한 방법은 수심에 따른 상관도를 기반으로 여타 하천환경에서 확대 적용가능성이 낮은 단점이 있어 본 연구에서 개선방안을 제시하였다. 본 연구의 대상하천은 낙동강 지류인 황강 합류부로, 현장실험 당시 황강은 합천댐 방류로 탁도가 높아진 상태였다. 따라서, 합류부에서 탁도가 높은 황강 영향권에서는 고탁도 조건에서 초분광수심법의 적용성도 추가적으로 고찰하였다.
2. 연구 방법
2.1 초분광수심법(Hyperspectral Bathymetry Method)
초분광 영상은 각 화소별로 150 개 이상의 상세 파장대로 나누어진 분광정보를 제공하나, 일반적으로 수심과의 상관관계를 규명 시 모든 파장대 정보를 활용하기보다는 수심과 상관도가 높은 파장대를 사용하거나(Lyzenga, 1978), 파장대비를 지수로 사용한다(Legleiter et al., 2009). 단일 밴드 영상에 의한 수심 추정 결과에 따라 반사도와 수심은 서로 강한 음의 상관관계를 보이는 현상을 토대로 특정 파장에서는 수심과 무관한 탁도나 부유사, 식생 등의 영향을 받아 수심과의 상관성이 없는 빛의 세기가 존재하는 것에 착안하여, 두 개의 파장에 분광특성의 비(밴드비, X)를 수심 추정에 사용하는 것이다. 수심을 추정하기 위해 밴드비를 활용한 이론은 두 파장에 대한 밴드비 X는 파장 λ에 해당하는 두 휘도 값으로 나누어 산정할 수 있으며(Stumpf et al., 2003), 바닥에서 반사된 휘도 Lb의 비로 바꾸어 Eq. (1)과 같이 표현할 수 있다. 이때, Lb는 Eq. (2)와 같이 수심 d와의 상관관계로 나타낼 수 있으며(Philpot, 1989), 최종적으로 밴드비 X를 Eq. (3)과 같이 수심 d와 관련한 식으로 변환할 수 있다. 밴드비는 특정 두 파장에 대한 빛의 세기를 비율로써 나타낸 것으로, 밴드비를 활용한 수심 추정은 바닥에 의한 반사도의 영향을 무시할 수 있는 것으로 알려져 있으며, 다중분광 및 초분광 영상에 적용되기 이전에 위성이나 항공기에 탑재된 RGB 영상과 근적외선 영상을 활용하여 수심을 추정하였다(Lyzenga, 1978, 1985; Stumpf et al., 2003).
여기서, Ed는 태양광에 수면에 비추는 조도를 의미하며, C는 빛이 대기에서 물로 전달될 때의 상호 간의 전달률, T는 파장에 따른 분자 간의 힘에 대한 흡수율, Rb는 바닥에서의 반사 휘도, Rc는 물기둥에 의한 감쇠된 반사 휘도, d는 수심, K는 파장에 따른 물의 흡수율이다. 한편, 지상에서 일정 영역은 사실상 태양광이 수면을 비추는 조도는 동일하다 가정할 수 있으며, 빛이 대기에서 물로 전달될 때 파장에 따른 큰 변화가 없다고 알려져 있다(Dierssen et al., 2003). 마찬가지로 파장에 따른 분자간의 힘과 물의 흡수율도 사실상 거의 유지되기 때문에(Maritorena et al., 1994), Eq. (3)은 Eq. (4)과 같이 간략화하여 나타낼 수 있다.
Eq. (4)를 활용하여 밴드비 X와 수심 간의 상관관계를 규명하여, 반사도로부터 수심을 추정할 수 있는데, 관련된 매개변수들을 추정하기 위해서 이론모형을 구축하거나(Legleiter et al., 2009), SVR (Support Vector Regression) 등의 기계학습을 활용하는(Pan et al., 2015) 등 다양한 방법 개선이 진행되고 있다. 그러나, 매개변수들의 추정을 통한 수심(d)의 계산은 추정에 필요한 다양한 매개변수들에 대한 추가적인 현장계측이 필요하고 이론식 또한 오차를 내포하고 있으며, Eq. (4)에 반영되지 않는 변수들도 존재한다. 그리고 현장 요건에 따른 각각의 매개변수들의 공간적인 변화도 있는데, 반영이 어려운 등 지점단위 제한된 수심측정이 아닌 이상 면단위 광범위한 영역에 적용하는 데 효율성이 낮거나 적용상 현실적 한계가 있다. 또한 어떠한 밴드비(X)가 수심과 가장 높은 상관관계를 가지는 최적밴드인지 관측 시 하천환경 및 촬영조건에 따라 위치별로 정하기 어렵다. Legleiter et al. (2009)는 Eq. (4)에 기반하되 바닥에 의한 반사된 휘도가 물기둥에 의해 반사된 휘도의 크기보다 크기 때문에 물기둥에 의한 반사도의 영향을 무시할 수 있다고 가정하고, 주어진 하천영역에서 다양한 수심과 촬영조건에서 확보된 관측수심을 활용하여 수심과 최적관계를 가지는 밴드비(X)를 지수(surrogate index)로 수심과 밴드비와의 관계가 선형이라고 가정하면 Eq. (6)과 같이 표현할 수 있다고 제시하였다. 물론 여기서 관계식은 반드시 선형일 필요는 없다. 기존 수심과의 상관관계를 활용할 경우, Eq. (4)에 나타난 매개변수들을 직접 산정 대신 초분광밴드비-수심 관계 회귀식 구축 시 절편에 포함시켜 별도 산정을 할 필요가 없는 편리성이 있다. 이러한 방식은 각종 지표(surrogate)를 활용하는 방식으로, 예를 들어 수위-유량 관계식을 구축할 때 각종 직접 산정이 불가한 항목들을 실측치와의 관계식을 통해 해결하는 측면과 동일하다.
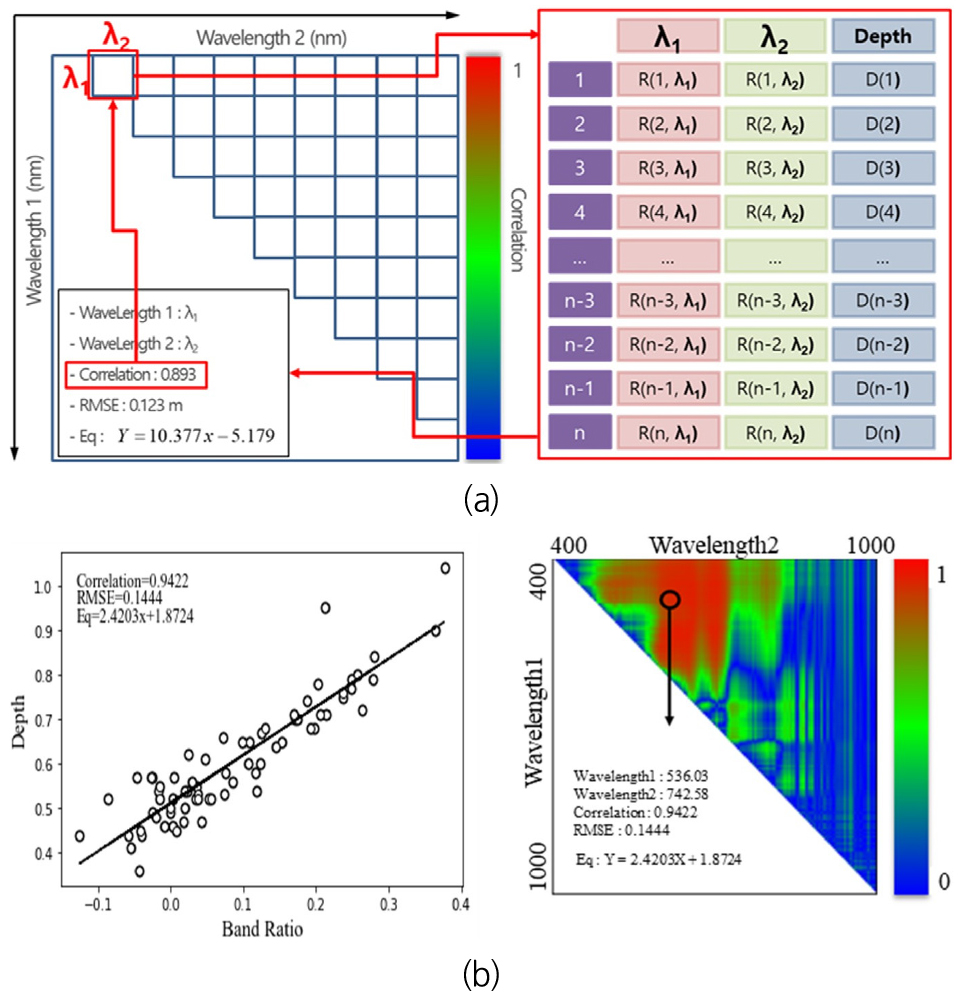
이때, Xopt는 수심이 측정된 복수의 위치에 해당하는 초분광 영상의 화소에 포착된 수백개의 분광정보 사이의 조합(i.e., nC2, n= 분광개수)를 기반으로 도출된 임의의 분광비로 설정하고 각 화소에 측정된 초분광 휘도비(reflectance ratio)와 해당수심을 선형회귀할 때 도출되는 결정계수(R2) 중 가장 결정계수가 높은 분광비 X를 최적분광비 Xopt로 선정하고(Fig. 1(a)You (2018)), 이 때 수심(d)과의 관계식을 초분광 촬영된 해당 하천 영역에서의 d-X 관계로 도출한다(Fig. 1(b)). 이러한 방식이 초분광수심법의 대표적인 OBRA (Optimal Band Ratio Analysis) 방법이다. 두 밴드로 구성된 2차원 평면에 상관계수를 색으로 표현하여 Fig. 1(b)와 같은 상관도맵(Correlation Map)으로 표현할 수 있다. 이러한 상관계수를 구성하면, 상관도가 가장 1에 가까운 위치에 해당하는 두 밴드에 해당하는 파장이 최적밴드비에 구성하는 파장이 되는 것이다.
최종적으로 산정된 d-X 관계식은 모든 초분광 영상 화소마다 적용되어 수심으로 변환하여 초분광 수심맵을 도출할 수 있다. 본 연구에서는 관계식을 Esri사의 ArcGIS pro에서 image calculator를 이용하여 해당 밴드의 영상의 정보를 추출한 후 밴드간의 비를 계산한 뒤 해당 수심 추정식에 적용하여 공간적인 수심맵을 산정하였다. 보통 최적 밴드비 분석법을 이용하여 선형 회귀분석을 진행하였을 때 저수심부에서 고수심부로 갈수록 반사도와 수심의 상관성을 저하시키는 외부적인 요인이 많아져 오차는 높아지고 상관계수가 떨어지는 경향이 생겨 비선형성이 증가하는 측면이 있다(You et al., 2020). 본 연구에서는 d-X 관계의 비선형성(2차포물선)도 고려하였다.
2.2 최대측정가능수심(Maximum Measurable Depth)
초분광 신호는 물속에서 물과 부유사 등에 의해 흡수되어 일정 수심 이상 투과가 되지 않는다. 즉, 휘도가 일정 수심 이상에서 사실상 수심을 반영하지 않음에도 불구하고 실측수심과 상관식에 포함시킬 경우 상관식을 왜곡시키거나 상관도를 저하시킬 수 있다. 그리고 도출된 상관식을 초분광 영상에 적용할 경우 투과되지 않은 고수심 영역의 수심측정에 심각한 오차를 초래한다. 따라서, 초분광수심법은 기계적으로 적용했을 경우 잘못된 Xopt를 산출하고 결과적으로 오류가 있는 d-X 관계식을 도도출할 수 있다. 그러므로 이러한 관계식 구성 시 포함시켜야 할 최대수심을 결정하는 방법을 개발하여 일정 수심 이상의 수심관측값을 OBRA에 배제(cut-off)시키는 방법이 필요하다(Legleiter et al., 2018; 2019b). 배제된 수심(cut-off depth)은 동시에 초분광으로 해당 하천조건에서 관측할 수 있는 최대수심을 제시한다는 의미가 된다. Legleiter et al. (2018)는 콜로라도강 등에 적용한 사례를 보면 대략 3.57 m 이상에서는 초분광비와 수심의 상관도가 가시적으로 저하된다는 사실을 발견하고 이 배제수심을 최대측정가능수심으로 간주하였고, OBRA 적용 시 해당 수심 이상의 실측수심들을 관계식 구성에서 배제시켰다. 동일한 방법을 Sacramento강에 적용하였을 경우 2.3 m로 최대측정가능수심이 나타났고(Legleiter et al., 2019b), 투명한 Kootenai강에 초분광수심법의 개선된 알고리즘(Logistic Regression)을 적용하여 최대측정가능수심이 9.5 m로 나타났다고 보고하였다(Legleiter et al., 2019a).
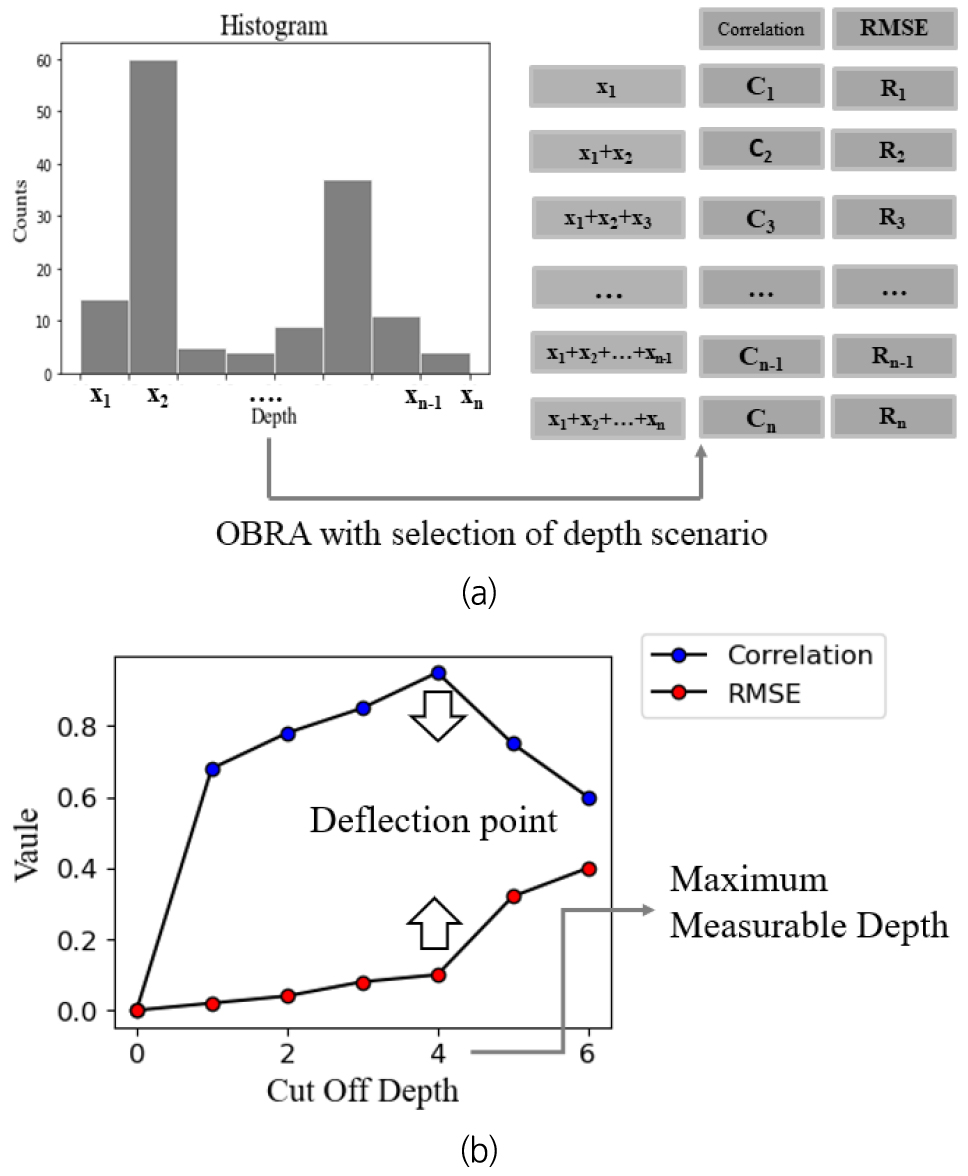
최대측정가능수심의 산정 방법은 실측한 수심의 범위를 파악한 후 적정한 구간 간격으로 수심자료들을 구분하여 순차적으로 저수심부터 점차 수심이 깊은 구간까지 구분한 데이터를 누적시켜 OBRA를 적용하되, 상관도(Correlation)와 실측과 추정 수심간의 평균제곱근오차(RMSE)를 구하여 특정 수심이상에서 상관도가 갑자기 저하되거나 평균제곱근오차가 증가하는 경우 OBRA가 적용되지 않음을 판단하고 그 수심을 최대측정가능수심으로 추정하였다. 그러나, 상관도를 활용할 경우 최대측정가능수심을 추정할 수 있으나 고수심으로 갈수록 수심관측치가 다수 누적되어 일정수심 이상에서 오차가 증가하더라도 상관도(correlation)의 변화는 유의미하지 않은 문제가 발생할 수 있다(Legleiter et al., 2019b). 이는 본 연구의 사례에서도 확인되었다. 따라서, 대안으로 OBRA에 사용된 실측수심과 동일한 위치에서의 초분광 추정수심간의 평균제곱근오차(RMSE)를 새로운 지표로 최대측정가능수심을 추정하고자 하였다. 이 경우, RMSE가 특정 수심에서 유의미하게 변곡될 때 배제수심 혹은 최대즉정가능수심으로 간주하였다.
수심 구간별 누적을 통해 OBRA의 수심과 밴드비 상관도(Correlation)와 RMSE 변화를 추적하여 최대측정가능수심을 결정하는 과정이 Fig. 2에 나타나 있다. 해당 기법의 상관도와 평균제곱근오차의 산정방법은 다음 Eqs. (7) and (8)에 각각 나타나 있다. 여기서, n은 OBRA에 사용된 수심자료의 수, 는 i번째 수심 추정 값, 는 수심평균값, 는 수심 실측값이다.
3. 현장 실험
3.1 대상하천 개요 및 실측수심 조사
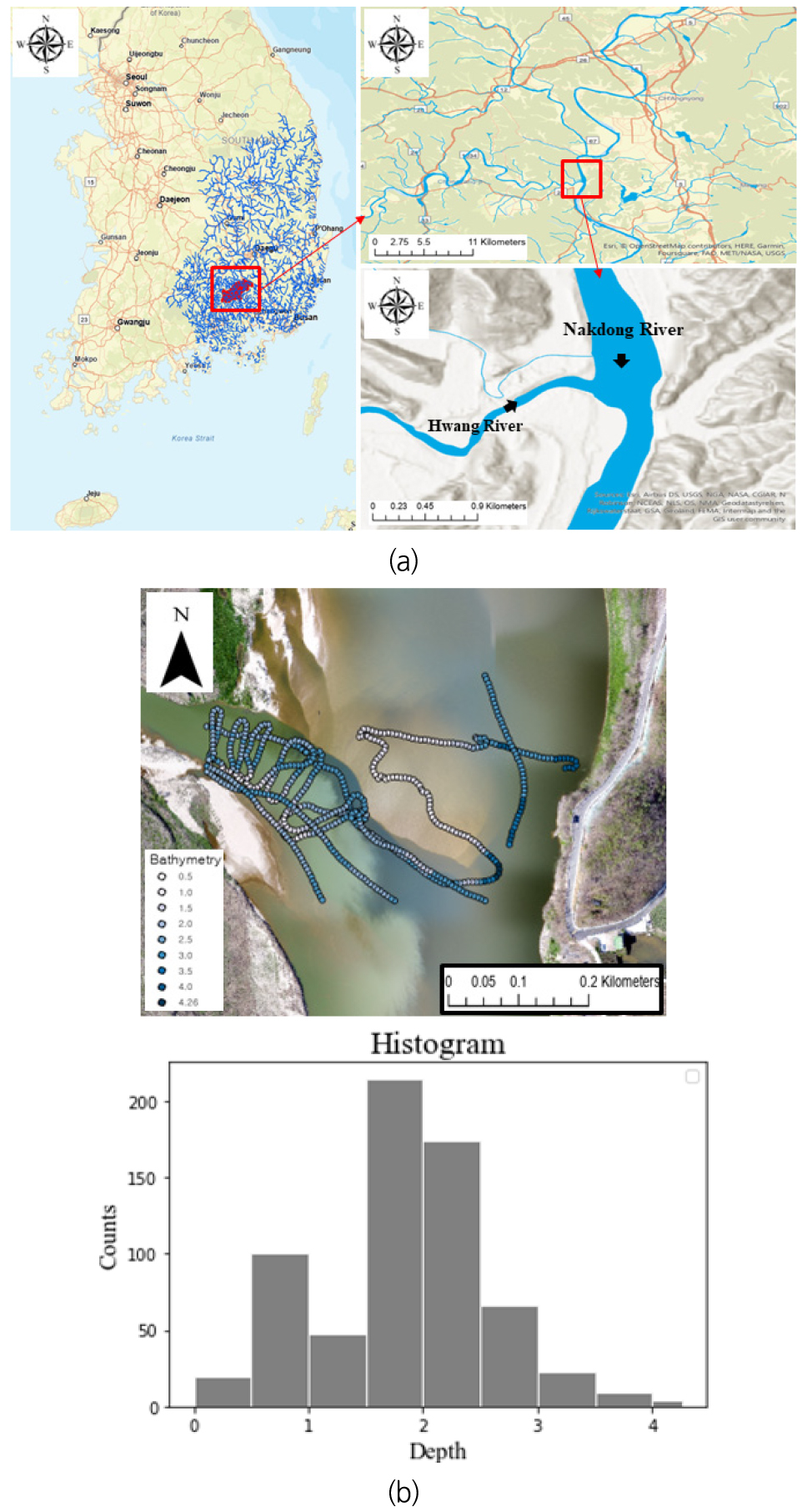
본 연구에서는 초분광 영상 기반 수심 추정 기술을 적용하기 위해 낙동강 수계의 경상남도 창녕군 합천창녕보 하류 약 1.5 km에 위치한 낙동강과 황강이 합류하는 지점을 대상 지역으로 선정하였다(Fig. 3(a)). 본 합류부에서는 본류인 낙동강과 지류인 황강이 혼합되며 다양한 수리, 수질 인자들의 특성변화를 확인할 수 있고 퇴적/침식 등 하상변동이 활발하게 발생하고 다기능보 직하류에 위치하여 주기적 하상변동 모니터링 대상지역으로, 수 cm의 저수심부터 최심부 4.26 m까지의 수심이 분포하는 지역이다. Legleiter et al. (2018)이 적용한 콜로라도강일 경우 최대측정수심이 3.57 m로 이 결과가 일괄적으로 적용된다면 초분광수심법으로 신뢰도 있게 해당지역 대부분에서 수심측정이 가능해야 할 것이다. 그러나, 이후 제시되겠지만 본 연구결과 국내대하천에서 3.57 m까지 측정되지 않았다.
대상 하천의 조사시기는 2021년 3월 30일로 갈수기에 해당하며 합류전 유량은 낙동강은 139.98 m3/s, 황강은 21.24 m3/s로 측정되고 흐름은 유속이 0.1 m/s 미만으로 거의 정체된 상태였다. OBRA 적용에 필요한 실측수심은 보트에 부착한 ADCP (Acoustic Doppler Current Profiler)를 운용하여 수집하였다. ADCP로는 SonTek사의 RiverSurveyor M9이 사용되었다. ADCP는 해당지역에서 합류부 직전(낙동강 우안)에 형성된 사주에서 시작하여 좌안의 최심부까지 단면 수심을 측정하였다(Fig. 3(b)). 이때, ADCP는 우안에서 최소 0.5 m까지 수심 측정이 가능하였으나, 사주에는 0.5 m 미만인 수심도 존재하여 ADCP 성능한계로 측정하지는 못했다. ADCP의 경우 최대측정가능수심이 대략 40 m 내외이므로 대상지역의 최대수심부(5 m 내외)는 충분히 측정 가능하였다. 합류전 낙동강 단면 측정수심은 해당지역에서 동시에 촬영된 초분광 영상과 결합하여 전형적인 평갈수기 대하천의 탁도 및 수심 특성을 보이는 낙동강 본류에서 초분광 수심 측정 기법의 적용성과 최대측정가능수심을 추정 및 검증하는데 활용되었다. 부가적으로 탁도가 높았던 지류인 황강 영향지역에서는 고밀도의 상세한 ADCP 수심측정이 수행되었으나(Fig. 3(b)), 황강 상류 합천댐 방류로 고탁수가 발생하여 초분광 수심기법의 적용성이 어려울 것으로 예상되었고, 실제로도 초분광을 활용해서 OBRA을 통한 수심측정은 일부 저수심부를 제외하고는 수심측정이 불가능한 것으로 나타났다(4.2.1절 참고). 탁도는 낙동강이 평균 탁도 10.9 NTU, 지류 황강의 탁도는 평균 탁도 176.4 NTU로 나타났다. 탁도측정 결과는 황강이 낙동강보다 높은 탁도가 발생되어 황강의 분광 특성이 탁도 요인으로 인해 초분광 수심 추정에 방해인자가 되는 것으로 판단할 수 있다.
3.2 초분광영상 취득
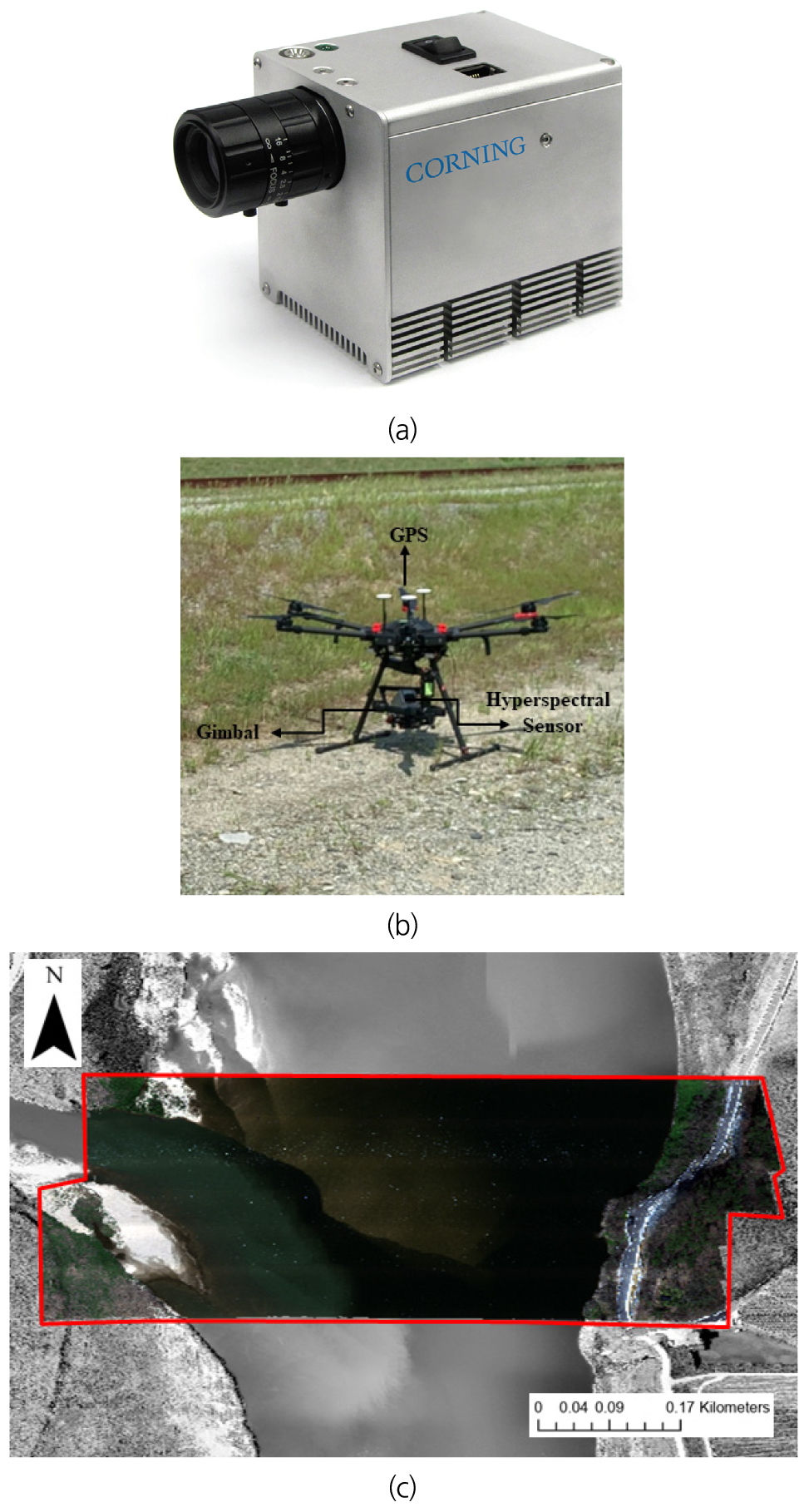
본 연구에서는 대상 하천의 분광정보를 취득하기 위해 소형 드론에 탑재된 초분광 센서인 Corning사의 Micro HSI 410 SHARK의 초분광 장비를 활용하여 취득하였다(Fig. 4(a)). 초분광센서는 중량 640 g으로 자연광 방식이며 근적외선(NIR) 파장대가 포함된 400~1000 nm 사이의 분광정보를 4 nm 단위로 150개 밴드에 걸쳐 취득할 수 있고 682개 화소를 300 Hz의 빈도로 수집한다. 해당 장비의 분광정보 수집방식은 광학 센서를 일렬로 배치하여 분광 정보를 수집하는 푸쉬브룸(Push-Broom) 형식이며 라인 스캐닝 방식(Line Scanning)을 통한 촬영 결과를 조합하여 초분광 영상을 생성시킬 수 있다(Corning, 2017). 대상 하천의 초분광 영상을 공간적으로 얻기 위해 초분광 센서를 드론에 장착하여 드론 자동비행 소프트웨어를 통해 경로를 지정한 후 드론이 초분광 영상 취득 임무 수행 후 자동 복귀하는 방식을 적용하였고 DJI Matrice 600 pro를 사용하였다. 또한 소형 드론으로 인한 초분광 장비의 흔들림 방지를 위해 DJI사의 RONIN-MX 짐벌을 장착하여 운용하였다(Fig. 4(b)).
드론탑재 촬영된 초분광 영상을 수심 추정 기술에 활용하기 위해 기하보정 및 영상정합 등과 같은 영상의 후처리 과정이 필요하다. 초분광 영상 촬영 결과인 원시 분광정보는 하나의 라인 형태로 저장이 되므로 실제 촬영한 드론 경로를 확인하여 중복되거나 불필요한 영역의 분광정보를 삭제한 후 평면영상을 위해 초분광 영상정합을 수행한다. 또한 기하보정을 통해 초분광 영상이 실제 위치와 일치하도록 참조점들을 기준으로 지형적인 특성을 보정하여 분광영상의 위치 정확도를 높였다. 본 연구에서는 자동비행 드론(DJI Matrice 600 pro)의 RTK-GPS 좌표를 통해 드론의 이동 경로를 파악하여 라인 스캐닝으로 취득한 초분광 영상 중 대상 하천이 찍힌 경로의 프레임 정보를 취득한 후 분광 정보를 포함한 초분광 영상과 위치정보를 포함한 파일을 경로에 맞게 취득하였다. 총 12 개의 경로가 추출되었고 경로에 맞는 초분광 영상에 위치정보 파일을 입력한 후 영상정합 하여 하나의 영상으로 취득하였다. 최종적으로 수집한 초분광 영상은 580 m × 230 m의 영역의 초분광 영상이며(Fig. 4(c)), 픽셀 크기는 9 cm이며, 총 400 nm~1000 nm 사이의 150 개의 밴드를 포함하고 있다.
초분광 영상에 지리정보 부여를 위한 참조점은 보조적인 광학영상을 토대로 선정하였으며 DJI사의 Mavic Pro 드론을 이용하여 초분광 영상 취득 방법과 같이 경로지정을 통해 내장되어 있는 광학영상 카메라를 통해 취득하였다. 또한 광학영상의 후처리 작업은 드론 영상정합 프로그램 Pix4D Mapper를 통해 취득하였다. Mavic Pro 드론을 이용하여 취득한 광학영상과 영상정합한 초분광 영상을 대조해 보았으며 위치가 맞지 않은 부분은 자갈이나 지형지물을 참조점으로 사용하여 Esri사 ArcGIS pro의 소프트웨어의 Georeferncing 도구를 사용하여 정확한 위치로 초분광 영상을 지리참조하였다. 정합된 초분광영상에 정확한 위치정확도의 부여를 통한 지리보정은 ADCP 실측수심과 연동을 통해 OBRA를 수행하거나 평가하는 데 사용되므로 중요하다. 실제로, 단순 초분광 촬영된 영상은 정교한 정합과정과 지리정보 부여가 쉽지 않아 통상적인 유저들이 쉽게 본 기술을 사용하지 못하는 장벽으로 작용하고 있다. 본 연구에서는 이러한 정합과 지리참조작업을 수행을 보조하도록 자체 소프트웨어를 개발하여 자동화 및 효율화를 강화시켰다. 마지막으로, 태양빛 반사로 나타나는 초분광 영상 오류(glittering error; Fig. 4(c)) 역시 필터링을 통해 제거하였다. 다만, 복수의 비행경로를 병합 시 경계면에서의 상호간 구분이 불가피하게 나타났다. 제시된 일련의 초분광 영상정합 등 후처리 과정의 상세한 절차는 본 논문 저자들의 이전 논문(You and Kim, 2021)에 상세하게 수록되어 있다.
4. 결과 분석
4.1 OBRA 및 초분광 영상 기반 수심맵 산정 초기 결과
황강-낙동강 합류부의 경우, 지류인 황강의 탁수로 인해 Fig. 5(a)와 같이 황강영향권과 낙동강 본류권으로 초분광 영상을 구분하여 초분광 밴드비-수심 관계식을 각각 유도하였다. 황강과 낙동강 영향 구역은 광학(RGB)영상을 활용하여 인위적으로 구분하였다. 이때, 황강 구역은 대부분 탁수로 구성되어 있음을 알 수 있으나 일부 매우 얕은 지역(e.g., 황강 유입부 우안)은 사주가 형성되어 있고, 사구가 육안으로 보이는 저수심부이다.
초분광 수심맵 산정은 우선 최대측정가능수심에 대한 고려없이(즉, 수심에 따른 배제없이), 전 영역에 걸친 실측 수심자료를 포함하여 OBRA를 적용하되, 이때도 가장 일반적인 선형관계식을 가정하여 시도를 해 보았다. 이 방법은 Legleiter et al. (2009)이 콜로라도강에 적용할 때와 같은 방식을 그대로 국내 환경에 낙동강과 황강(고탁수) 영역에 적용하여 관련 기술의 개선없이 국내 하천환경에 적용가능한지를 점검하는 것이 목적이다. Fig. 5는 황강과 낙동강에 대해 현장 측정 ADCP 수심 측정결과를 모두 OBRA에 적용하여 최적밴드비-수심관계식을 도출한 결과를 보여주고 있다. 황강의 경우 Fig. 5(b)에서 나타나듯이 산포도가 크고 상관도는 0.46, RMSE는 0.46 m로 높게 나타났다. 전반적으로 초분광 신호가 수심과의 상관도가 낮음을 알고 있고 이는 상관도맵에 붉은 영역이 거의 없는 결과와 일치한다. 따라서, 황강 영역은 높은 탁도로 인해 초분광 신호가 하상에 도달하지 못하고 수층 일부에서 반사되는 신호만 포집되었다는 것을 의미한다. 즉, 사실상 이 정도 탁도에서는 대부분의 수심구간에서 초분광 영상으로 측정이 불가하다는 것을 알 수 있다. 이에 비해 낙동강 영역은 Fig. 5(c)와 같이 황강에 비해 관계가 상당부분 개선된 결과로 나타났다. 상관도맵에서 상관계수가 높은 지역이 붉게 나타나도 최적밴드비에서 상관도는 0.95로 매우 높았다. 다만, RMSE (수심측정 오차로 볼 수 있음)가 0.36 m로 여전히 크게 나타난 부분이 문제이다. 보통, 높은 상관도를 보일 경우 도출된 d-X 관계식을 의심없이 사용하는 경우가 많은 데 이 경우 주의를 해야한다는 점을 이 결과가 보여주고 있다. 예를 들어 이 결과는 수심이 3 m 내외에서 약 10%의 오차가 발생할 수 있다는 사실을 의미하기 때문이다. 그리고, Fig. 5(c)의 관계식 도출 시 분포를 보면 특정수심대(저수심부와 고수심부)에 포집된 많은 수심자료가 있어서 관계 자체는 비선형성이 발현되었음에도 불구하고 선형관계식 강제 적용에도 높은 상관도를 보여주는 문제가 있다. 다시 말해, 가능한 많은 수심측정값을 적용하여 도출된 높은 상관도의 d-X 관계식이 수심별 일정한 빈도로 계측되지 않을수록 초분광수심법의 정확도를 담보할 수 없을 수 있음을 나타낸다. 즉, 되도록 수심대별로 비슷한 빈도의 직접 수심자료를 사용해야 한다는 의미이다. 이러한 d-X 관계식의 문제는 높은 RMSE로 확인된 것이다. 이 결과는 무조건적인 모든 실측수심자료의 활용이 오히려 초분광수십법의 신뢰를 현격히 감소시킬 수 있음을 시사한다. 따라서 일정 수심 이상을 배제하고 관계의 비선형 등을 고려하는 기법 적용상 제약사항을 적용시킬 필요가 있는 것이다. 또한 OBRA 적용 시 산출되는 RMSE를 주요 조건으로 활용할 수 있음을 나타낸다.
4.2 최대추정가능수심을 고려한 수심맵 개선
종합해 보면 Fig. 5에 나타난 OBRA의 초기 적용 결과는 다음의 개선이 필요하다는 점을 시사한다. 첫째, 최대추정가능수심을 산정해야 한다. 둘째, 최대추정가능수심 이상은 관계식 구축 시와 수심맵 산정 시 제외시켜야 한다. 셋째, 실측 수심을 최대한 다수 사용한다고 반드시 정확도 높은 관계식 도출을 보장해 주지 않으므로 가급적 수심대별로 일정한 빈도로 구성된 수심자료를 선별적 적용해야 한다. 넷째, 선형 관계보다는 비선형 관계가 보이는 경우 반영해야 한다는 점이다. 이러한 원칙을 적용하여 낙동강 및 황강 영역에 대해 다시 OBRA를 적용하여 수심맵을 각각 아래와 같이 재산정하여 개선여부를 검토하였다.
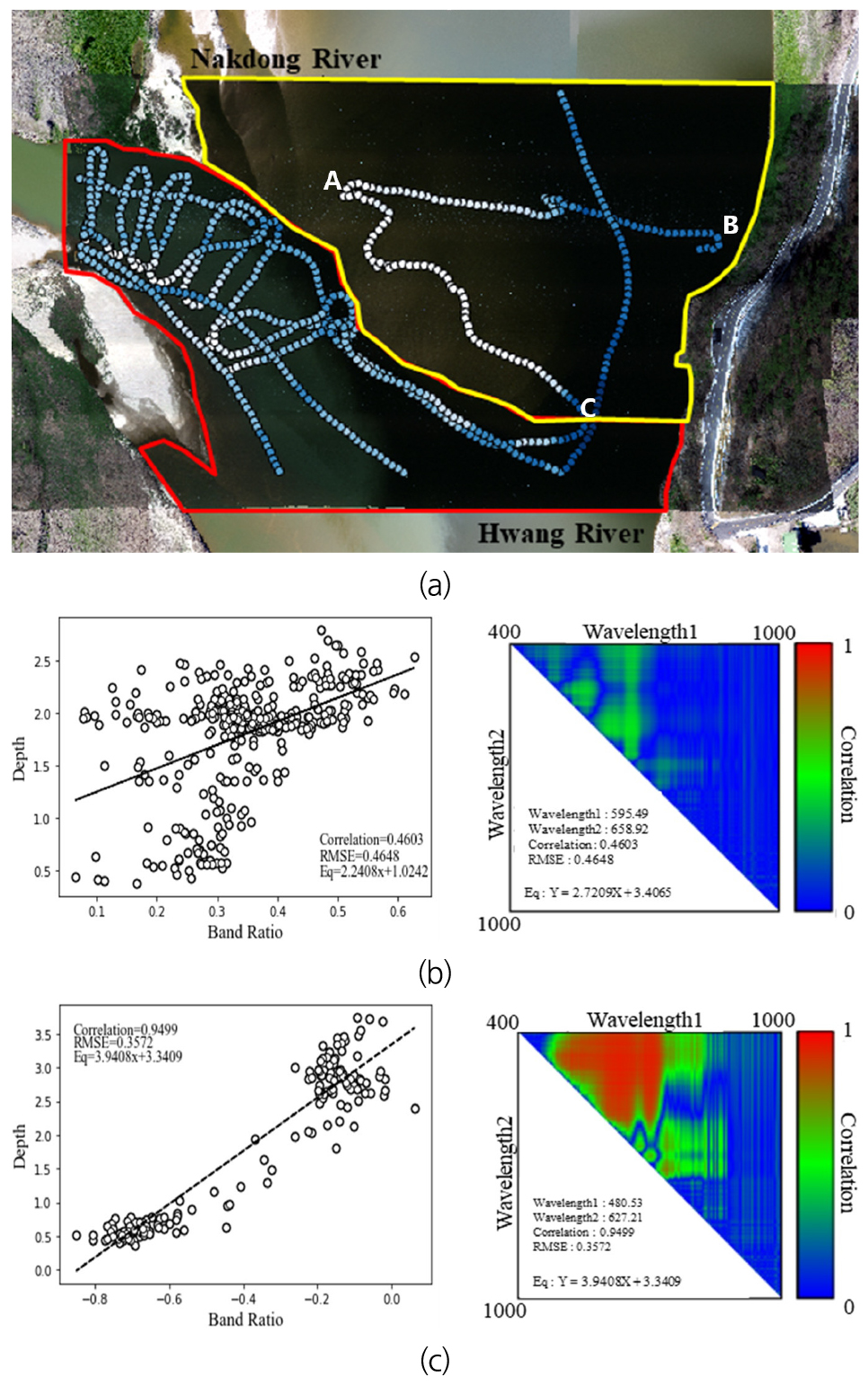
Fig. 5.
Preliminary OBRA in hyperspectral images for both Nakdong and Hwang River region where entire depth measurements were applied without considering cut-off depth over maximum measurable depth: (a) entire in-situ depth measurements by ADCP moving boat operation where both regions were divided to individually apply OBRA; (b) OBRA applied for Hwang River data; (c) OBRA applied for Nakdong River data
4.2.1 낙동강 영역 수심맵
Fig. 6(a)와 같이 우선 낙동강 영역에 국한하여 OBRA를 적용시켰다. 이 때, OBRA를 위해 사용된 ADCP 수심의 경우도 전체 측정된 ADCP 수심 대신 단면의 변화를 일정한 빈도로 반영하는 데 적절한 수심자료만 사용하였다(Fig. 5(a)의 AB 단면). 그리고 d-X 관계식도 비선형식인 2차다항식을 기본으로 적용하였다. 적용가능한 최대수심은 Table 1과 같이 다양한 시나리오로 특정수심 이상을 배제시켜 가면서 각 케이스별로 OBRA을 적용하고 도출되는 예측치와 실측치 간 RMSE 및 상관도를 산정하여 Fig. 6(b)와 같이 도시하였다.
Fig. 6(b)는 수심을 0.5 m 간격으로 저수심으로부터 최대 수심까지의 수심 자료를 누적해가면서 각 구간별 OBRA를 시행한 결과이다. 예를 들어 배제수심 2.5 m인 경우는 이상의 수심을 배제(Cut-off)시키고 이하 자료로만 OBRA를 수행했다는 의미이다. 이때, Legleiter et al. (2018)에서 제시된 방법인 배제수심 별 상관도 변화는 1.0 m 이후 현장 최대수심(3.5 m)까지 변화시켜볼 때 약간의 증감은 있지만 변화가 거의없이 높은 수준의 상관도에 일정하게 수렴됨을 알 수 있다. 이 결과는 상관도만 활용할 경우 전 수심범위에 적용가능하다는 결과로, 오히려 최대측정가능수심을 특정할 수 없다는 점을 의미한다. 이에 반해 RMSE를 사용한 결과를 보면 2.5 m 구간까지는 10 cm 오차로 완만하게 증가하다가 2.5 m 이상에서 갑자기 20 cm, 전체를 모두 적용했을 때는 약 30 cm 이상로 급격히 증가함을 알 수 있었다. 추세선에서도 명확하게 변곡되는 형상을 보였다. 따라서, 2.5 m 구간 이후의 수심 데이터는 초분광 영상의 최적밴드비와 상관성이 현저히 떨어지는 것으로 판단할 수 있어 대상 하천의 최대 추정 가능 수심은 2.5 m라고 판단할 수 있었다. 이 결과는 종래의 상관도를 활용하는 방식에 비해 RMSE를 활용하는 방식이 적절한 오차 이내를 보장할 수 있는 수심을 정할 수 있어 타당함을 알 수 있다. 본 연구에서는 RMSE 경향에서 변곡이 나타나는 지점으로 판단했지만, 만약 사용자가 지정한 특정 관측정확도(RMSE) 이상을 허용하지 않는다면 조정도 가능하다. 도출된 최대측정가능수심을 적용하여 산정된 d-X 관계식을 적용한 수심과 ADCP 실측수심을 비교하면 산정된 수심의 의미를 알 수 있다. Fig. 7은 도출된 d-X식을 초분광 영상에 적용하여 수심맵을 산정한 결과이고 2.5 m 이상의 수심이 존재하는 지역은 배제되었다. 수심맵 중 특정구역들과 해당 지역의 드론영상을 비교하면 우안의 저수심부의 경우 매우 상세하게 지형을 묘사할 수 있음을 알 수 있다. 그리고 Fig. 8에서 보듯, 초분광수심(붉은색)은 수심 2.5 m까지 실측수심과 매우 유사한 성능을 보이고 있으나 2.5 m 이상에서는 오차가 매우 커지고 초분광 신호가 상당부분 투과하지 못한 결과를 명확히 보여줌을 알 수 있다. 따라서, 낙동강 영역에서 도출된 초분광영상 기반 수심은 수심 2.5 m 이하인 지역만 신뢰도있게 사용될 수 있고, Fig. 6(b)와 같이 RMSE를 활용하는 방식이 더 적절하다고 할 수 있다. Fig. 6(c)에서는 수심대별 실측수심의 빈도도 여전히 고수심부와 저수심부가 상대적으로 큰 수준이나, 수심이 변화하는 구간도 적절히 분포하여 이 정도 수준에서 OBRA 수행에 문제없음을 나타내었다.
한편, 본 연구에서는 최적밴드비와 수심의 관계가 단순선형보다는 비선형성을 가진다고 보고 2차 다항식을 적용하였다. 그러나, 많은 경우 선형성을 가정하고 OBRA를 수행하므로 Fig. 7(b)는 선형회귀식을 적용하였을 경우 비선형과 비교한 결과를 나타냈다. 선형관계식을 적용한 경우는 비선형에 비해 그림과 같이 최대측정가능수심이 2.0 m로 나타났고 그 이상에서는 측정 성능이 매우 저하되었다. 또한, 저수심부에서 비선형관계식에 비해 전반적으로 과대산정하고 있음을 나타냈다. 이러한 비교를 통해 비선형성을 고려할 경우 측정가능한 수심이 증가하고 정확도도 높아진다고 볼 수 있었다. Fig. 8(c)는 d-X 비선형 관계식을 낙동강 구역 중 검증용 ADCP 수심과 비교한 결과이다(Fig. 5(a), AC 측선).
Table 1.
Assessment of maximum measurable depth by changing cut-off depth
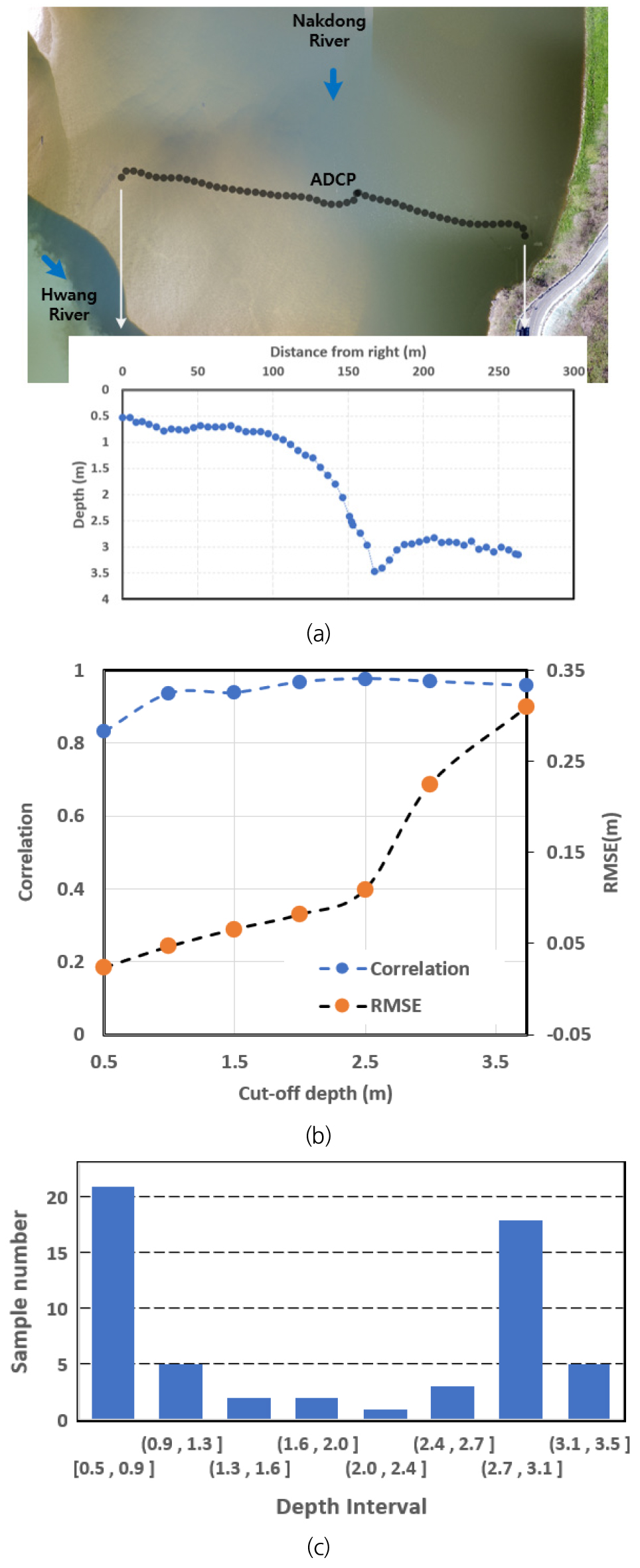
Fig. 6.
Estimation of maximum measurable depth in Nakdong River region: (a) In-situ depth measurements using ADCP to support OBRA; (b) Correlation Coefficient and RMSE in OBRA over increasing cut-off depth to find out maximum measurable depth by tracking their trend; (c) depth frequency distribution over various depth step in Nakdong River
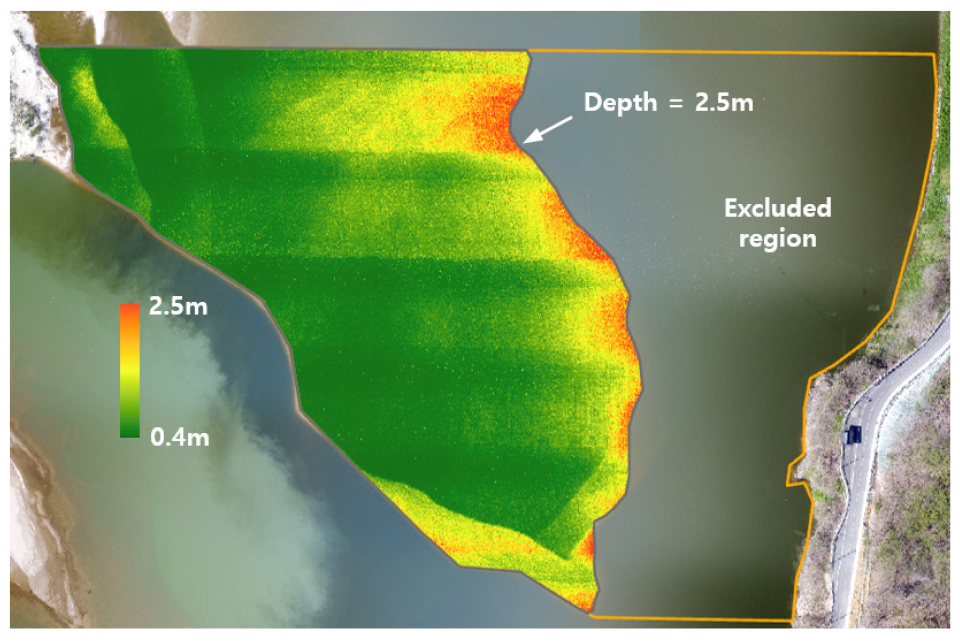
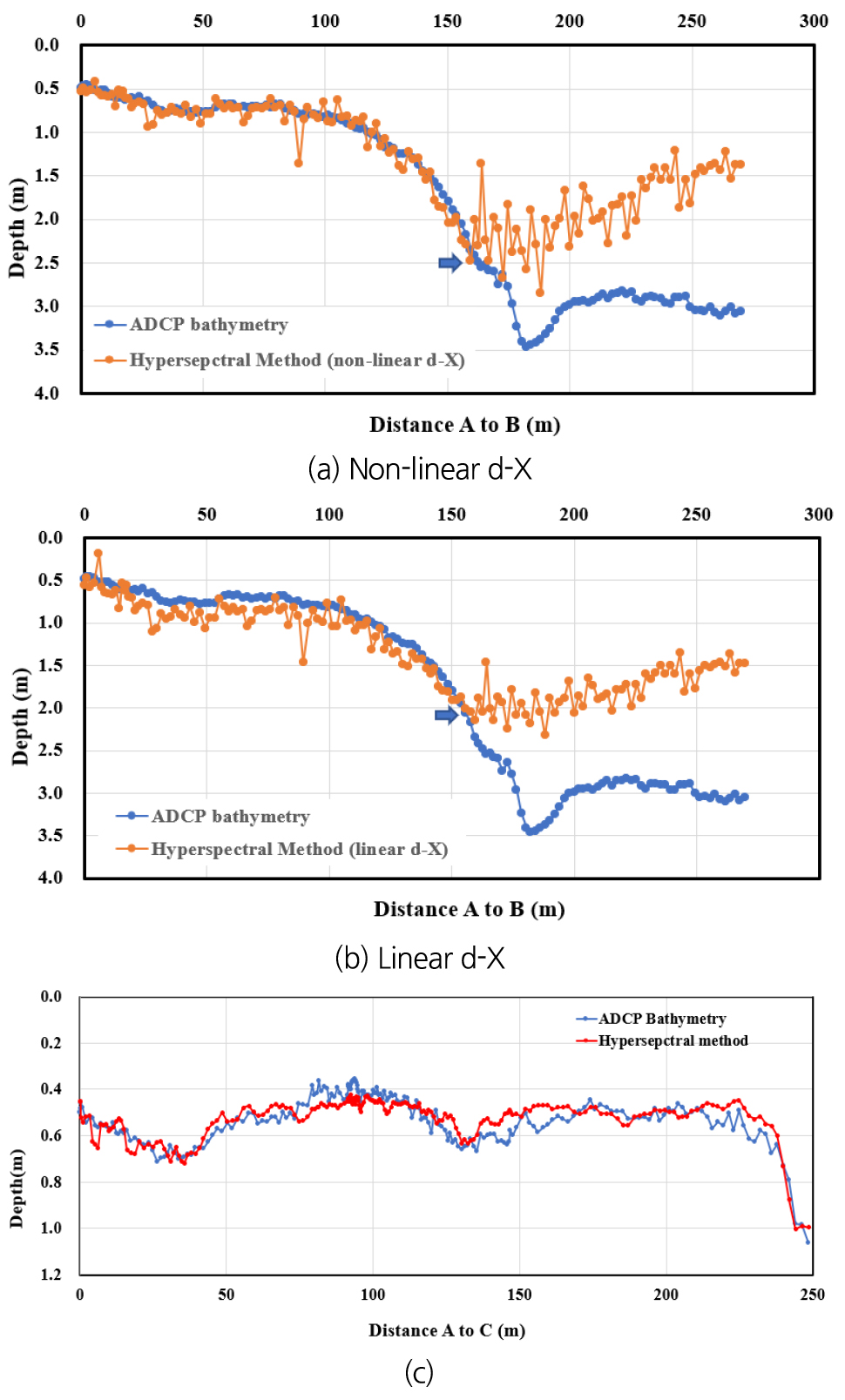
Fig. 8.
Bathymetry estimation by hyperspectral image acquried in Nakdong region and its performance compared with referenced in-situ depth measurements at the identical locations: (a),(b) depth comparison when non-linear and linear d-X relation, respectively, was applied. Different maximum measurable depth for each case was identified. This study adopted non-linear d-X relation; (c) depth comparison with validative data
4.2.2 황강 영역 수심맵 산정
낙동강 영역과 구분하여 황강 영역에서도 동일한 과정을 적용시켰다. 황강 영역은 Fig. 9(b)에 나타난 바와 같이 탁수가 높아 최대측정가능수심이 줄어들 것으로 예상된다. 그러나, 황강 우안부는 드론영상을 보면 하상이 어느 정도 감지됨을 알 수 있다. 황강 영역에서는 Fig. 9(a)와 같이 ADCP 수심 측정의 공간적인 정밀도가 높고, 전체 수심 구간 별 분포는 우안으로 저수심부가 형성되어 있다. ADCP로 측정된 최대수심은 3.12 m, 최소수심은 0.48 m으로 수심구간 별 분포는 Fig. 9(c)와 같다. Fig. 9(d)는 황강 영역에 비선형 OBRA를 사용하여 수심 단계 별 상관도와 RMSE를 분포를 나타내고 있다.
Fig. 9(d)로부터 우선 RMSE의 변곡되는 부분에서 황강 영역 최대측정가능수심은 1.25 m로 나타났다. 흥미로운 부분은 이번엔 전통적인 상관도로부터도 동일한 결과를 얻을 수 있다는 것이다. 즉, 낙동강의 경우 Fig. 6(b)에 나타난 바와 같이 RMSE를 사용하는 것이 타당했으나 탁도가 높았던 황강의 경우 두 지표 모두 최대측정가능수심을 추정하는 데 적용이 가능했다. 1.25 m 이상을 배제한 수심에 대해 OBRA을 통해 비선형 d-X 관계식 d = 20.6806x2 - 2.1726x + 0.5323을 적용하였으며 이때 RMSE는 0.14 m, 상관도는 0.84였다. 이 경우 상관도가 낙동강 영역(0.94)에 비해 낮게 나타났는데 Fig. 9(a)의 분포도에서 보듯 저수심부 위주로 계측된 과도한 샘플을 사용한 결과로 볼 수 있다. 도출된 초분광 수심맵은 Fig. 10(a)와 같이 최대측정가능수심 1.25 m 이하에 적용한 영역만 표시하여 나타냈는데, 드론 영상에서 보이는 사구를 비롯한 저수심부 상세한 하상지형이 평탄화되어 식별이 다소 어려웠다. 즉, 고저차이가 RMSE보다 작은 정밀한 하상측정에 한계를 보인 것이다. 이 경우, 인근인 낙동강의 상관도가 상대적으로 높은 d-X식을 황강부에 적용하였는데, 결과는 Fig. 10(c)와 같이 황강 우안 저수심부 하상을 정확하고 정밀하게 포착함을 보여주었다. 이 경우도 수심적용 한계는 1.25 m로 제한시키고 나머지 지역은 주어진 높은 탁도와 최대측정가능수심 이상인 지역으로 초분광으로 수심측정 불가지역으로 나타냈다. Fig. 10 결과를 살펴보면 동시에 촬영한 항공사진으로 일부 식별이 가능한 정밀 하상(Fig. 10(b))을 인근에서 도출된 낙동강 경험식으로 황강 초분광 수심맵이 적절히 구현해냄을 알 수 있다. 이 결과는 비록 하천수의 성질과 탁도가 상이하더라도 높은 상관도와 낮은 RMSE로 구축된 d-X 관계식은 범용으로 적용될 가능성을 시사한다. 다만, 이 가설은 다양한 적용사례에 걸쳐 검증되어야 할 것이다.
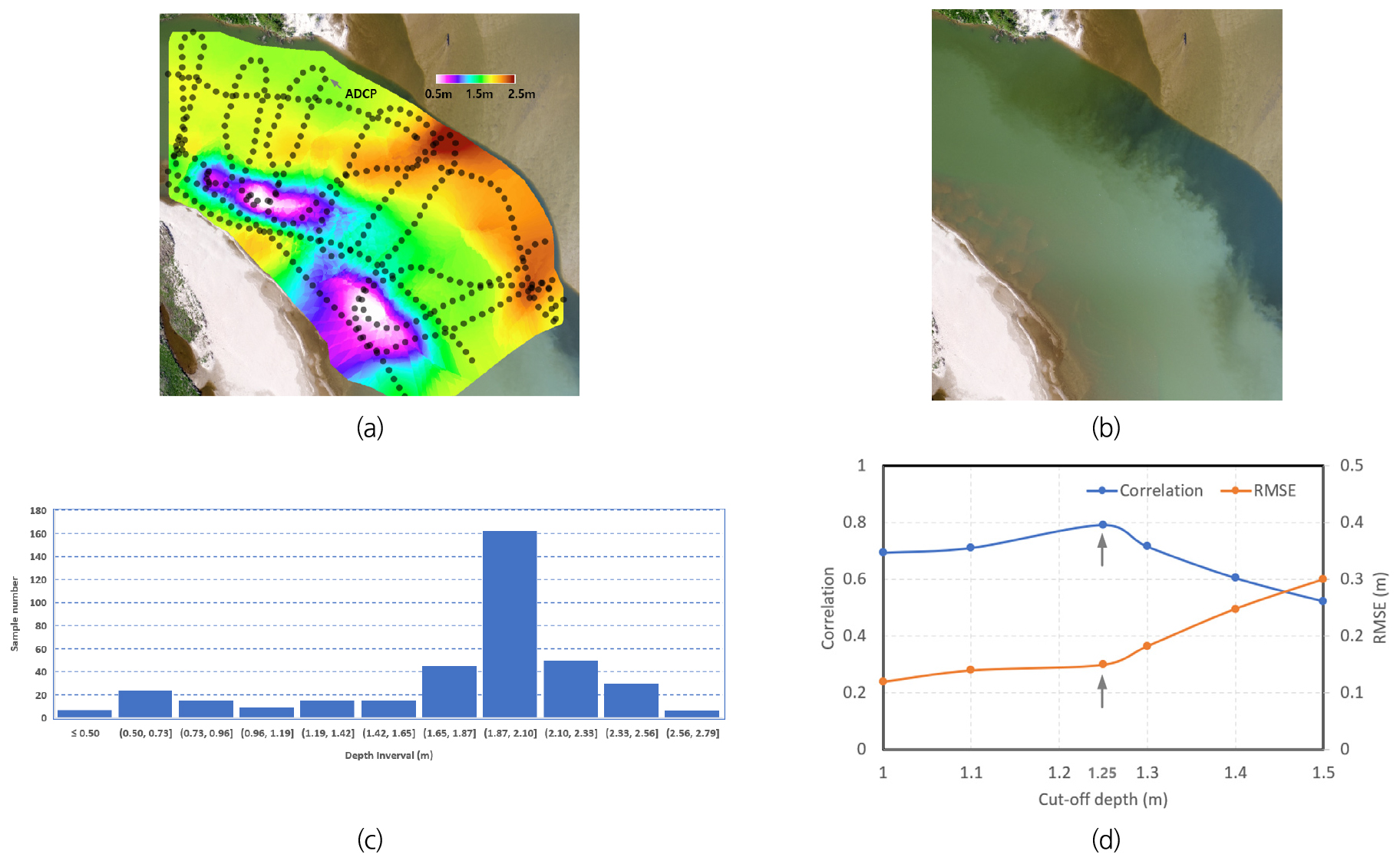
Fig. 9.
Determination of maximum measurable depth in Hwang River: (a) the locations of in-situ depth measurements and interpolated morphology; (b) aerial photograph where turbid colored region could be identifiable; (c) depth frequency distribution over various depth step in Hwang River; (d) sensitivity in correlation and RMSE in OBRA over various cut-off depth to track variation in their trend
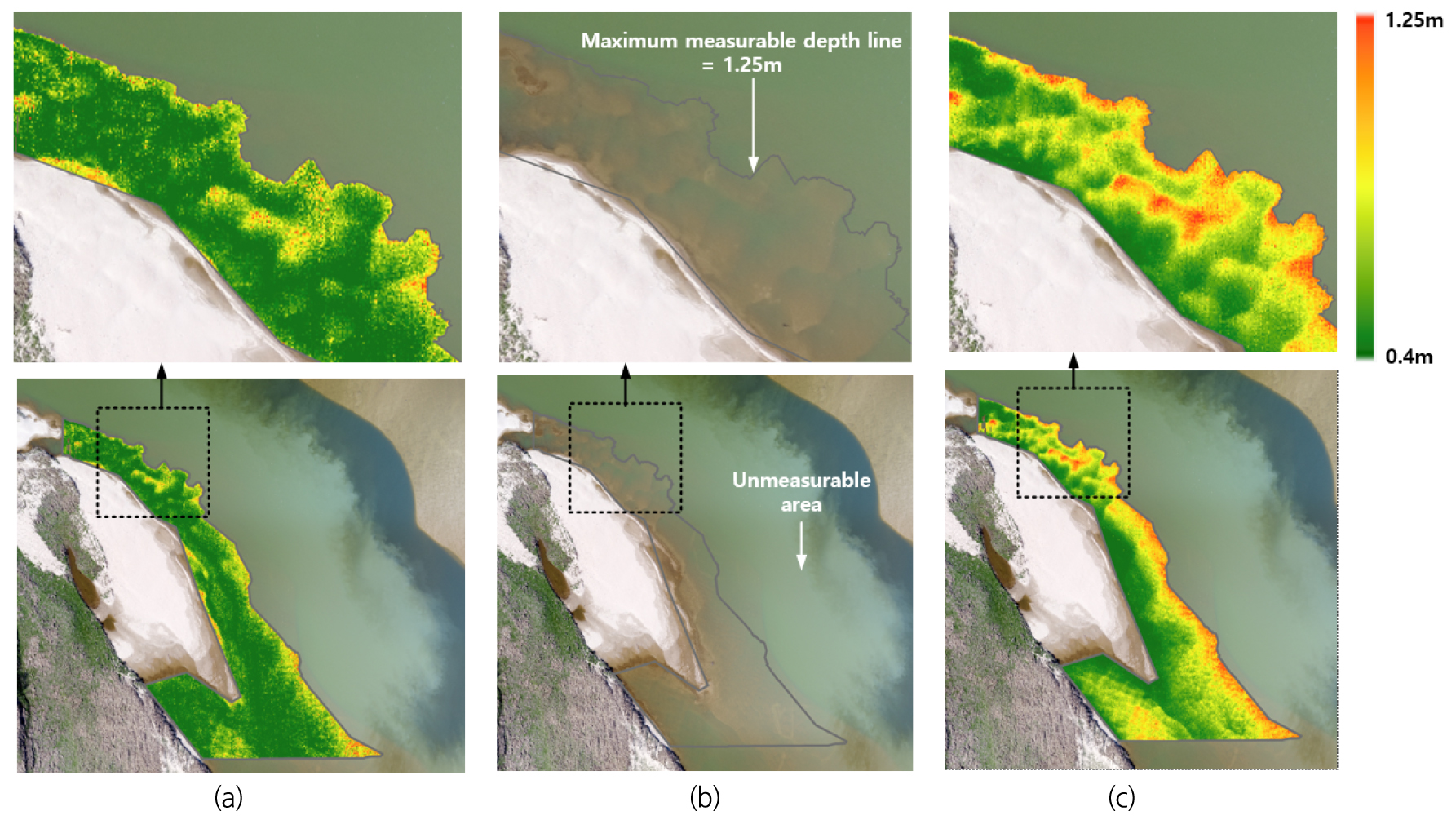
Fig. 10.
Bed morphologies over Hwang River in shallow region (less than 1.25 m): (a) bathymetry distribution obtained using d-X regression built from depth measurements in Hwang River region; (b) aerial photograph to visualize shallow regions in Hwang River where a line for maximum measurable depth is aligned; (c) more detailed morphological feature adopted from adjacent Nakdongs’ d-X relation
5. 토 의
본 연구를 통해 탁도 및 수체특성이 상이한 것으로 예상되는 낙동강과 황강 합류부에 동시에 관측한 초분광 자료를 수심측정에 각각 활용하였을 때 나타난 결과에 대해 토의하면 다음과 같은 점을 시사한다.
1) 최대측정가능수심은 탁도 등 주어진 하천환경에서 초분광으로 수심을 측정할 경우 한계조건으로 사용되어야 하며, 최적 d-X 상관도를 구축하고 도출된 초분광 수심의 적용한계를 설정하는 데 필요하다. 즉, 최대측정가능수심 이상의 수심자료는 OBRA에 사용되지 않아야하며 추정된 수심결과도 이 값 이상은 적용해서는 안된다. 본 연구에서 낙동강과 황강 지배영역에 적용한 결과 최대측정가능수심은 각각 2.5 m, 1.25 m로 각각 나타났다. 측정 당시 낙동강과 황강에서 측정된 1 secchi depth (세키깊이)는 각각 1.2 m, 0.9 m였다. Secchi depth는 지름 30 cm 4분원이 백색, 흑색으로 칠해진 평평한 원판인 Secchi disk를 무게추와 함께 줄에 고정시켜 물 속으로 천천히 내려보내 더 이상 Secchi disk가 보이지 않는 지점까지의 깊이를 의미한다. 대략 낙동강과 황강에서 초분광에서 측정가능수심이 각각 2 와 1.4 secchi depth로 나타났다. 이 결과는 통상적인 초분광이나 수심라이다의 하천수심 성능목표가 1.5 secchi depth임을 고려하면 대략 목표치에 상당한 결과로 볼 수 있다. 그러나, 황강과 낙동강에서 초분광으로 수심 계측의 성능이 다르게 나타난 점은 주목할 필요가 있다. 이 결과는 탁도에 따라 secchi depth도 다르지만, 이 기준에서의 초분광 성능도 탁도가 높을수록 초분광 신호의 흡수가 커져 도달할 수 있는 수심도 줄어들게 됨을 알 수 있다. 따라서, 낙동강보다 더 맑은 물일 경우 최대측정가능수심도 증가할 수 있음을 의미한다(Legleiter et al. (2019a)의 경우 9.5 m의 성능을 보였다). 본 연구에서와 같이 탁도 등 하천수의 성질이 다른 경우 측정가능수심이 각각 2.5 m, 1.25 m로 2 배 차이를 보였다. 이렇듯 최대측정가능수심은 현장조건에 따라 상이하다는 사실을 알 수 있다. 아마 동일한 하천에서도 유황에 따라 탁도 등의 차이가 날 경우 최대측정가능수심도 당연히 상이한 결과를 제공할 것이다. 다만, 본 연구에서 도출한 낙동강 최대측정가능수심인 2.5 m 경우 전형적인 평갈수기 국내 대하천의 탁도 조건이므로 대략적으로 국내 하천에서 초분광 수심법으로 측정가능한 수심측정성능이 2.5 m 정도라고 간주할 수 있다.
2) 본 연구에서 제시한 초분광 기반 OBRA를 통해 수심맵을 산정할 경우 최대측정가능수심을 산정하는 절차로 종래의 Legleiter et al. (2018)가 제시한 상관도를 사용하는 방법 대신 관계식 구축에 사용된 실측수심과 추정수심 간의 RMSE를 사용하는 것이 더 정확하다고 볼 수 있었다. RMSE를 사용했을 때 낙동강 및 황강의 경우 모두 오차가 유의할 수준으로 증가하는 수심이 나타났으며 최대측정가능수심으로 간주할 수 있었고, 실측 수심과 비교했을 경우(Figs. 8(a) and 8(b))에서 보듯 이 수심 이상에서는 오차가 급격하게 증가하는 결과를 보였으므로 타당한 산정법이라 할 수 있다. 다만, 상관도에 의한 방법도 황강의 경우 적용이 가능했다. 본 연구에서는 초분광 수심측정법 적용 시 최대측정가능수심을 산정하는 절차를 반드시 수행하여 이 수심 이하 실측치를 활용하여 OBRA를 적용하고, 도출된 수심맵에 적용한계로 활용해야 한다고 제시하였다. 그리고 이때 기존의 상관도가 아니라 RMSE가 보다 안정적으로 적용 가능하였다. 다만, 이 결과는 향후 지속적인 현장 적용을 통해 확립할 필요는 있다.
3) 초분광은 황강 우안부 저수심부에서 사구 등 수심이 거의 0 m에 가까운 상세하상지형 측정까지 가능하다는 사실을 보여주었다(Fig. 10). 다만, 낙동강의 경우 ADCP의 접근은 불가하였지만 최저 수심이 0.4 m 정도로 형성되었다. 관련된 감천의 연구사례(You, 2018)도 최저수심이 0.1 m 수준까지 가능하다는 사례가 있다. 이 결과는 초분광수심법의 최소측정가능수심이 0 m에 가깝다는 점을 의미하는 데 다른 측정법과 비교하여 주목해야 할 성능이라고 할 수 있다. 왜냐하면, 최근 각광을 받는 초음파방식이나 수심 라이다 방식은 최소측정가능수심이 0 m가 아니기 때문이다. 일반적으로 선박에 부착하여 운용하는 ADCP의 경우, 선체의 접근한계와 초음파 방식의 제약(blanking distance)으로 최소측정가능수심이 50 cm 정도로 보고되고 있다(Yorke and Oberg, 2002; Kasvi et al., 2019). 그리고, 수심라이다 방식도 표면반사와 하상반사신호가 섞여 대략 수심 50 cm 미만에서는 성능이 저하된다(Pan et al., 2015; Legleiter et al., 2019b). 수심라이다 최대측정가능수심 성능목표도 대략 1.5 secchi depth 임을 감안하면 초분광 방식에 비해 오히려 측정범위가 더 협소할 수 있다. 게다가 수심라이다는 산포된 포인트클라우드 형태로 제공하여 추가적인 공간보간이 필요하다. 저고도 드론에 탑재되어 활용되었을 때 초분광수심법이 대략 10 cm 공간해상도의 연속적인 DEM을 제공하는 측면에서 더 유리하다. 다만, 수심라이다는 별도의 보조적인 현장측정 없이 측정 즉시 수심값을 제공하는 반면, 초분광 수심측정 방식은 촬영과 동시에 OBRA를 위한 현장 수심측정이 필요하고, 후처리 등의 다소 복잡한 과정을 거쳐야 한다는 단점이 있다.
4) 4.1절은 OBRA에서 민감성이 확인된 최대측정가능수심을 고려하지 않고 단순히 측정된 현장 수심자료 전체를 기계적으로 반영했을 때 초분광 수심도출 성능이 현저히 저하될 수 있음을 보여주고 있다. 그리고, Fig. 6(b)는 비록 초분광으로 도출된 경우에도 최대측정가능수심 이상에 외삽하면 상당부분 오류가 수반됨을 알 수 있다.
5) 현장 수심측정(ADCP나 RTK-GPS 등)은 고비용을 수반하여 초분광 수심측정 방식의 비용을 증대시키는 역할을 수행하므로, 현장 측정을 최소화하기 위한 최적 현장수심측정자료 확보에 대한 효율적인 전략이 필요하다. 본 연구에서도 낙동강 영역의 경우 실측 수심이 저수심부터 고수심부까지 일정하게 분포하는 1 개 단면으로 충분하다는 사실을 보여주었다. 저수심부나 고수심부 등 특정 수심대가 많을 경우 상관도나 OBRA 관계식 도출 시 오류를 수반할 수 있어 많은 수심자료를 활용하는 것이 오히려 역효과를 불러올 수 있었다. 황강의 경우 주로 저수심부(1.25 m 미만)에서 측정된 ADCP 수심자료만 적용하였는데 분포 자체가 균등하지 못하여 상관도도 저하되고 결과적으로 수심측정의 정확도가 낙동강에 비해 낮아졌다. Fig. 9(a)에 나타난 초분광 기반 수심맵은 황강 중 최대측정가능수심 1.25 m 미만에 나타났는데 실제 드론영상으로 확인 가능한 상세 하상지형을 대략적으로 구현 가능하였다. 반면에, 낙동강 영역에서 도출한 식을 황강 저수심부에 적용하였을 경우 Fig. 9(c)와 같이 상세 하상지형을 실제와 가깝게 구현해 냈고 정확도도 더 증가하였음을 알 수 있다. 이러한 결과는 초분광수심법 적용을 위한 현장수심 측정 전략으로 수심의 차이와 구간별 빈도가 유사하게 나타나는 형태의 소수의 수심측정이 오히려 더 유리하다는 결론과 부합된다. 즉, 수심이 고르게 분포된 횡단면 1 회 수심측정 정도로 충분하다. 다만, 초분광 영상화소와 수심측정 위치(x,y)의 일치도 중요하다. 따라서, RTK-GPS 수준의 수 cm 이내의 공간적 정확도가 권장된다. 그리고, Fig. 9에 나타난 바와 같이 황강은 탁도로 인해 1.25 m 이하 저수심부만 측정가능하였는데 이 수심 이하 직접수심측정 결과를 OBRA에 적용하였을 경우 일정한 수심대에 지나치게 많은 현장자료를 적용하여 오히려 정밀 하상측정에는 한계를 보였음을 알 수 있다. 이에 인근에서 도출된 d-X식을 적용하였는데 결과는 더 우수하였다. 이러한 결과는 향후 탁도나 저질조건 등 하천환경 별 기계학습을 통해 범용적용이 가능한 d-X식 도출도 가능함을 시사한다. 이 경우 장점은 보조적인 현장실측이 불필요해진다는 의미이다.
6) 초분광수심법을 통한 정밀하상측정 성과는 고밀도 초음파측심법에 비해 더 우수하다고 볼 수 있다. Fig. 11은 황강 영역에서 1.25 m 이내 저수심부 사구 등 상세하상을 Figs, 11(a) and 11(c)와 같이 ADCP와 초분광법을 활용하여 표출하였을 때 실제 항공영상(Fig. 11(b))으로 포착할 수 있는 하상의 형상을 초분광법이 개선된 정확도로 포착할 수 있음을 보여준다. 초음파법으로 인한 불가피한 공간보간을 통한 표출은 이와 같은 상세하상 지형 측정에서는 한계가 있고(Conner and Tonina, 2014), 초분광법이 저수심부 상세하상 측정에 주목할만한 성능을 보여주고 있음을 알 수 있었다.
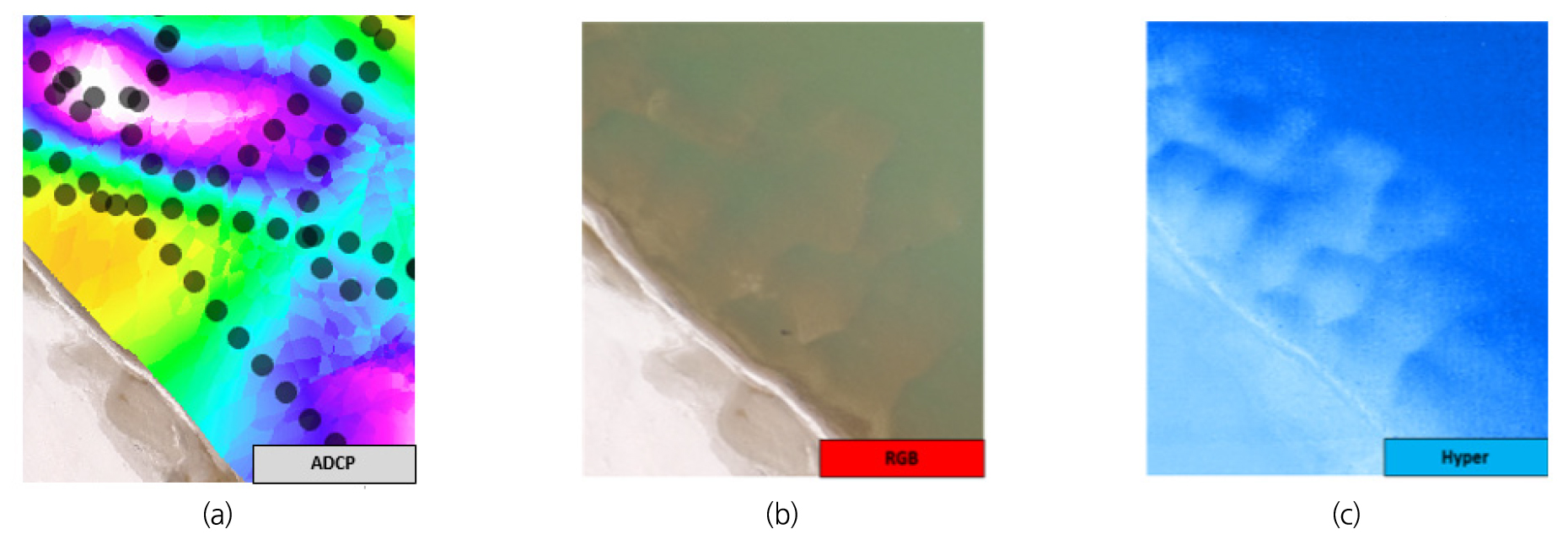
Fig. 11.
Morphological characterization in Hwang River over various ways: (a) interpolated bed surface using ADCP bathymetry where black dots indicate the locations of depth measurement; (b) aerial photograph where bedforms (e.g., sand dunes) are identifiable due to shallow depth; (c) bed morphology estimated by hyperspectral method
6. 결론 및 향후과제
대규모 준설이나 하천 개보수 이후 하상은 본래 안정상태로 복원하는 상황에서 상당한 수준의 하상변동을 수반하여 기존의 단순 HEC-RAS 모델링용 500 m 간격의 단면수심측정 성과로는 상세한 하상 분포를 도출하기 어렵고 따라서 하상변동량을 정량적으로 파악하는 데 한계가 있어 왔다. 그러나, 기존 초음파 방법 등 직접 접촉식 방식은 고비용을 수반하고 특히 퇴적부와 같은 저수심부의 경우 미계측지역으로 남아 기술적인 돌파구가 필요한 상황이다. 최근 드론의 보급과 함께 하천원격탐사(Fluvial Remote Sensing) 기술이 대안으로 검토되고 있고 수심 라이다는 이미 본격적으로 수심측정에 적용되기 시작하고 있으나 저수심부 측정에 일정부분 한계가 있고 장비자체의 고비용(2~3 억원)으로 범용 적용에 한계가 있다. 초분광수심법은 다른 대안으로 적극적으로 고려되고 있는 상황이다. 국내의 경우 2018년 초분광 수심법은 저수심 위주의 지방하천(감천) 정밀하상 적용을 통해 검토된 바 있다(You, 2018). 그러나, 아직 대하천 수심측정에 적용된 바 없고, 초분광 수심법을 국내하천에 적용했을 경우 최대측정가능수심 등 제원을 산정해 보지 않아 이번 연구에서 대표적인 국내하천인 낙동강과 퇴적으로 저수심부가 존재하는 황강 합류부에 초분광수심법을 적용하여 적용성을 검토하였다. 검토 결과를 요약하면 다음과 같다. 첫째, 초분광수심법은 주로 저수심부에서 정밀한 수심맵을 효율적으로 산정할 수 있음을 보여주었고 측정가능한 수심의 범위는 통상적 대하천(낙동강)의 경우 0~2.5 m로 나타났다. You (2018)에 의하면 최저측정가능수심도 0 m 수준의 극소수심의 경우에도 적용가능하여 이 영역 측정에 한계가 있는 초음파 및 라이다 방식에 비해 우수하였다. 최대측정가능수심도 1.5 secchi depth를 지향하는 수심 라이다와 유사한 수준으로 나타났다. 다만, 보통 5~6 m 에 달하는 대하천의 고수심부 수심은 측정이 불가능하고 이 경우 여전히 초음파 방식만 유효하다고 볼 수 있다. 따라서 전체 정밀수심맵 산정을 위해서는 고수심부 초음파수심법 결과와 저수심부 초분광수심법 결과를 융합하여 운용하는 것이 현재로선 최선이라고 할 수 있다. 둘째, 본 연구를 통해 최대측정가능수심은 현장마다 상이하므로 반드시 수심도출절차(OBRA 등)에 포함시켜야 한다는 점을 발견하였다. 그렇지 않은 경우 초분광수심법은 이 수심 이상에서 상당한 수심오차를 수반하였다. 또한, 최대측정가능수심은 다양한 시나리오의 배제수심(cut-off depth)을 OBRA 적용 시 도출되는 RMSE 패턴이 기존의 상관도를 이용하는 방식에 비해 우수하였다. 셋째, 황강 합류부의 탁도가 높아 측정가능수심이 인근 낙동강에 비해 절반(1.25 m)으로 낮아져 초분광수심법은 탁도가 높은 환경일 경우 한계가 있음을 확인하였다.
본 연구에서는 초분광수심법의 적용성을 탁도, 수심분포 등 여러 관점에서 대하천에 초분광수심법을 적용한 사례를 통해 성능을 평가하였고, d-X 관계식 도출 시 최대측정가능수심을 고려하는 등 본 기법의 실무적용에 필요한 절차들을 제시하였다. 물론 이러한 결과는 아직 일반화하기에는 한계가 있으며 추후 보다 다양한 하천 환경에서 유사한 방식으로 적용성을 검토하여 최종적으로 본 기술의 적용가능 제원과 현장적용 매뉴얼을 도출할 필요가 있다. 대하천의 경우, 깊은 수심에 적용이 가능한 다양한 장비와 연계하여 병합된 수심맵을 산정하는 방안도 연구되어야 할 것이다. 또한 초분광수심법의 최대측정가능수심도 후처리 알고리즘 개선을 통해 증가시키는 방향으로 연구가 진행될 예정이다.
