

1. 서 론
2. 연구 대상 지역 및 방법
2.1 연구 대상 지역
2.2 연구 방법
2.3 수치모형의 적용
2.4 인공신경망 이론
3. 분석결과
3.1 하류부에서의 홍수위 및 보의 저류량 검토
3.2 인공신경망 적용
3.3 적용 결과의 분석
4. 결 론
. 서 론
용수 이용 목적의 고정보는 유수방해, 토사퇴적으로 인한 수질오염, 홍수위 상승 등의 문제를 가지고 있다. 이의 개선을 위한 중소하천에서의 하단배출형 가동보는 이수, 치수 및 생태환경의 기능을 극대화시킬 수 있다. 다단 형태의 하단배출형 가동보는 물을 저류하고, 저류된 물을 보 상류에서 유입되는 유입수량 만큼 수문 개도부를 통하여 방류하도록 하여, 일정량이 항상 저류되어 용수이용, 퇴적토사의 배출에 의한 수질개선이 가능하고, 홍수시 하천의 하류부에서의 수위조절이 가능하다.
기존 가동보의 운영은 상류 측 홍수위나 하류 측 역류를 조절하기 위하여 가동보의 높이를 제어하는 시스템을 구비하고 있지만 이러한 시스템 역시 단순한 수위조절 기능으로 가동보의 방류량을 제어하지 못하는 실정이다. 반면에 다단 배치된 하단배출형 가동보의 운영은 보 설치 구간에서의 적절한 저류량의 확보와 더불어 보가 설치된 하천의 하류에서의 홍수위의 조절이 가능하다. 따라서 각각의 가동보 지점에서의 저류와 하류부의 홍수위 조절을 목표로 한 다단식으로 설치된 보에서의 관리수위 제안이 필요하다.
하천에서 수리특성 분석에 관한 연구로 Kim et al. (2003)은 가동보의 형식에 따른 수리현상과 수질개선 효과를 분석하였고, Ahn and Lyu (2013)는 4대강 살리기 사업 전과 후 하천단면을 이용하여 1차원 수리모형을 구축하여 부정류 흐름해석을 통해 흐름의 천이를 반영하고 수리시설물(다기능보) 운영을 통한 수리특성을 분석하였다.
Kim et al. (2011)은 가동보의 적절한 운영기준을 찾기 위해 보 상류 수위의 상승에 따른 가동보의 개방정도를 다양한 조건으로 구성하고, 각각의 모형에 동일한 홍수사상을 적용하여 홍수모의를 실시하였다. Kang et al. (2011)은 HEC-RAS를 이용하여 극한홍수 사상에 대한 천변저류지의 홍수위 저감효과를 분석한 바 있고, Noh et al. (2012)은 홍수 시에 주운을 위한 수위조절방식(elevation controlled gates)의 수문도입에 따른 수리특성을 분석하였고, 모형의 검정과 검증을 통하여 적용한 HEC-RAS 모형의 타당성을 제시하였다. Lee et al. (2014)은 수리학적 모형을 적용하여 홍수기에 가동보 수문을 완전 개방한 경우, 부분 개방한 경우 및 가동보 수문이 완전 폐쇄된 경우의 세 가지 시나리오에 대해 홍수위를 모의하고 그 결과를 비교분석하였다.
Luis et al. (2013)은 수력발전과 홍수제어 구조물의 제어에 따른 저수지 저류용량 감소의 효과를 분석하고 그 특성을 규명하였다. Raymond (2014)는 댐의 홍수저감 특성을 분석하고, 다양한 홍수특성에 따른 홍수저감 성능을 분석하였다. Navarathinam et al. (2015)은 Malwathoya 유역의 홍수와 가뭄의 저감에 대한 댐의 효과를 연구하였다. Yoshioka et al. (2015)은 수문 개도 높이, 수문 개도 개수, 조작 간격 등의 수문조작을 통해 지역과 배수 용적 내의 침수 피해에 대한 연구를 수행하였다.
Kim et al. (1992)은 인공지능모형의 구현을 위하여 사용되고 있는 패턴인식 알고리즘을 강우-유출과정에 적용하여 유출량을 예측하고 적용성을 제시하였다. Raman and Chandramouli (1996)는 신경망 모형을 이용하여 단일 저수지의 일반적인 운영방안을 도출하였다. Chandramouli and Raman (2001)은 초기 저수량, 유입량, 수요량을 입력변수로 하고, 별도의 최적화 모형을 통해 얻어낸 최적 방류량을 출력변수로 설정하여 3개 댐을 대상으로 저수지들 간의 연계 운영방안을 신경망 모형을 이용하여 도출하였다. Na et al. (2010)은 저수지 군 연계운영을 위해 일별 최적화 모형인 CoMOM (coordinated multi-reservoir operation Model 4.2)에서 활용되는 월말 목표 저수위의 도출을 위해 월별 신경망 모형을 활용할 것을 제안하였다. Kwon et al. (2013)은 data mining 기법 중 신경망을 이용하여 보의 관리수위에 따른 보 하류부 홍수위 저감기법을 분석하였다. Jee and Choo (2014)는 data mining 기법인 신경망 이론과 하도의 수리학적 홍수추적을 사용한 자료를 구축하여 홍수위를 비교하여 검증하였다. Jin (2014)은 data mining을 통해 가동보 수문에 대한 운영방안으로 수문 개도 산정 알고리즘 모델을 제안하였다.
대상구간의 저류와 홍수 조절기능을 위한 가동보의 설치에 따른 수문 운영방안의 결정은 보의 위치와 상·하류의 수위, 수요량, 저수 가능량 등과 더불어 다양한 유입량 조건으로 쉽지 않다. 저류와 하류부의 홍수조절 기능을 위한 효율적인 수문의 운영을 위해서는 모든 유입유량 조건에 따른 관리수위와 그에 상응하는 저수량, 하류부 홍수위의 자료를 가지고 있어야 하나, 특정 조건에 대한 자료만을 가지고 있어, 실제 수문의 운영에 적합한 자료가 제공되기 어려운 실정이다. 따라서 다양한 조건에 대한 관리수위 별 각각의 수문에서의 저류량과 하류부의 홍수위의 구축은 임의 유입량을 가진 유출의 발생 시 목표하는 저류량과 하류부 홍수위의 결정을 위한 각 수문의 관리수위의 결정을 위해 필요한 것으로 평가된다.
앞서와 같이 신경망을 이용한 연구의 대부분은 강우에 따른 유출해석과 저수지의 연계운영, 보에서의 관리수위에 따른 홍수위 저감 또는 이의 저감을 위한 관리수위 검토이다. 보의 고유 기능인 저류량의 확보와 더불어 보가 설치된 대상구간의 하류부 홍수위 조절을 동시에 만족시킬 수 있는 보에서의 관리수위의 제안에 대한 연구가 요구된다. 본 연구는 홍수가 상습적으로 발생하는 금강의 지류인 치성천의 하류 구간에 하단배출형 가동보를 다단으로 배치하였을 경우 이에 의한 가동보의 관리수위 제어에 따른 홍수위 저감과 저류효과를 분석하였다. 대상구간의 상류에 일정 재현기간을 가진 홍수 수문곡선을 대상으로 다단식 보 설치 지점에서의 여러 가지 관리수위에 따른 각 보에서의 저류량과 대상구간의 하류지점에서의 홍수위를 추정하여 인공신경망의 학습과 검증의 자료를 구축하였다. 구축된 자료를 기반으로 인공신경망을 적용하여 대상구간의 각 보에서의 목표 저류량과 하류부에서의 목표 홍수위를 동시에 만족할 수 있는 각 가동보에서의 관리수위를 예측하는 방법론을 제시코자 함이다.
2. 연구 대상 지역 및 방법
2.1 연구 대상 지역
본 대상지역은 충남 청양군 정산면 해남리를 기점 경계로 하고, 충남 청양군 목면 화양리의 국가하천인 금강 합류점을 종점으로 하는 지방하천인 치성천이다(Fig. 1).
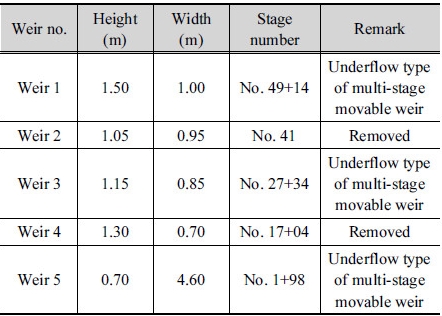
치성천은 유역 면적 43.55 km2, 유로장 11.97 km, 형상계수 0.30의 긴 사각형에 가까운 형태를 가지고 있고, 유역형상은 수지형으로 유수가 하천에 집중되지 않으나, 금강 합류부에서 배수 영향으로 홍수범람이 자주 발생한다(Chung Nam Provincial Government, 2008). Fig. 1과 Table 1에서 같이 설치된 고정보의 고유기능인 저류량을 확보하면서, 대상구간의 하류에 위치한 보의 하류부에서의 홍수저감 효과를 분석하기 위해서 5개의 고정보를 3개의 하단배출형 가동보로 대치하여 목표하는 저류량과 하류부에서 홍수위를 위한 각 가동보에서의 관리수위를 제안하였다.
2.2 연구 방법
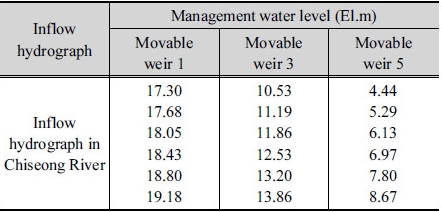
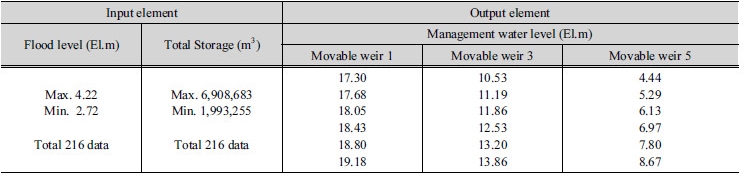
Fig. 1과 Table 1에서와 같이 대상구간에 설치되어 있는 5개의 고정보 2와 4는 제거하고, 고정보 1, 3, 5 지점에 각각 하단 배출형 연직 가동보를 다단식으로 계획하여 각 가동보의 관리수위 별 저류량과 그에 상응하는 대상구간 하류부에서의 홍수위를 추정하여 인공신경망의 학습과 검증자료를 구축하였다. 학습과 검증자료의 구축을 위하여 10년 빈도 홍수수문곡선을 유입량으로 선정하여 각 가동보에서의 관리수위에 따른 저류량과 그에 상응하는 하류부에서의 홍수위를 추정하였다. 설치된 하단배출형 가동보의 관리수위는 가동보 1에는 17.30 El.m에서 19.18 El.m까지 6가지, 가동보 3에서는 10.53 El.m에서 13.86 El.m까지 6가지, 가동보 5에서는 4.44 El.m에서 8.67 El.m까지 6가지에 대해 6 × 6 × 6 = 216가지의 경우에 대해 분석을 수행하였다(Table 2).
구축된 216개의 학습과 검증을 위한 자료는 하단배출형 가동보를 다단으로 배치하였을 경우, 인공신경망을 이용하여 보의 기능인 목표 저수량과 대상구간의 하류에서의 목표 홍수위를 만족시키는 각 가동보 설치 지점에서의 관리수위를 제안하는데 사용한다(Fig. 2).
하단배출형 가동보는 승강식 수문으로서, 평상시에는 하단을 적절하게 개방하여 토사배출과 적정 저류기능을 가지고, 홍수시에는 완전 개방하여 홍수량이 원활히 소통되도록 한다. 가동보의 다단 배치 방식은 가동보를 설치하였을 때 상한수위가 끝나는 지점에 맞춰 상류에 가동보를 설치하는 것으로 정의하였다(Fig. 3).
Fig. 3.
Schematic diagram showing the management water level of the underflow type of multi-stage movable weir
2.3 수치모형의 적용
수리특성의 해석은 미국 공병단에서 개발되어 실무에 빈번하게 사용되는 HEC-RAS 모형을 사용하였다(Hydrologic Engineering Center, 2010). HEC-RAS에서는 수리구조물의 수문조작을 고려하기 위해 time series gate openings, elevation controlled gates, navigation dams, rules의 4가지 방법으로 구성할 수 있고, 본 연구에서는 elevation controlled gates를 적용하여 모형을 구성하였다.
HEC-RAS 모형의 입력자료는 치성천 하천기본계획에 수록된 하천단면과 조도계수를 이용하였고, 상류단 경계조건은 10년 빈도 홍수문곡선을 하류단 경계조건은 등류수심을 적용하였다. 홍수수문곡선은 치성천 하천기본계획에 의한 10년 빈도 홍수량과 홍수위를 이용하여 첨두 홍수량 198 m3/s, 첨두 홍수량 발생시간 0.2 hr, 홍수 지속시간은 1 hr을 가지는 가상의 수문곡선을 작성하였다(Fig. 4).
Noh et al. (2012)은 굴포천 유역의 귤현보에 elevation controlled gates 조건을 적용하여 특정 단면에서의 수위에 따른 주운수로의 개폐를 설정하였다. 본 연구의 목적은 대상구간에서의 목표한 저류량과 하류부 홍수위 조절을 위한 가동보의 관리수위의 결정으로 수문조작 방법은 상류단의 수위가 일정 수위에 도달하면 수문을 개폐하는 elevation controlled gates 방식을 선정하였다.
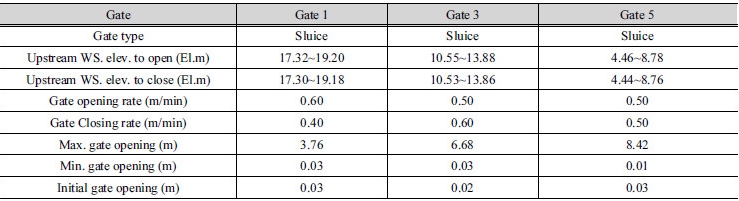
Elevation controlled gates의 수문조작 설정은 수문의 형태(gate type)는 sluice gate로 설정하였고, 수문의 위치에 따라 관리수위에 따른 특정 단면(가동보 상류 단면)에서의 수문 개방수위(upstream water stage elevation to open, El. m)와 수문 개폐수위(upstream water stage elevation to close, El. m), 수문 개방 속도(gate opening rate, m/min), 수문 개폐속도(gate closing rate, m/min), 수문 최대 개방높이(max. gate opening, m), 수문 최소 개방높이(min. gate opening, m)와 초기 수문 개방 높이(initial gate opening, m)를 설정하였다(Table 3).
수문을 통과하는 단면에서의 방류량은 다음과 같다.
자유흐름
 (1)
(1)
잠수흐름
 (2)
(2)
여기서, Q는 방류량(m3/s), C는 유량계수, W는 수로 폭(m), B는 수문 높이(m), h는 구조물 상류수심(m), H는 구조물 상․하류 수심차(m)이다.
2.4 인공신경망 이론
인공신경망이란 뉴런(neuron)의 생물학적 특성을 가진 신경조직을 모델로 하여 간단한 기능을 대규모로 연결시킨 네트워크 형태의 정보처리구조이다(Wasserman, 1989). 인공신경망은 신경망을 구성하는 뉴런의 종류와 연결 형태, 그리고 연결링크에 가중치를 부여하는 방식 등에 따라 여러 유형으로 나뉜다. 본 연구에서는 역전파(back-propagation) 학습 알고리즘을 이용하는 다층 퍼셉트론(multi-layer perceptron)을 이용하였다.
다층 퍼셉트론은 인공신경망의 일종으로서 역전파 신경망이라고도 하며, 입력층(input layer)과 출력층(output layer) 사이에 하나 이상의 중간층이 존재하는 인공신경망 모델로 Fig. 5와 같은 층상구조를 갖는다. 이 때, 입력층과 출력층 사이의 중간층을 은닉층(hidden layer)이라 하며 네트워크는 입력층, 은닉층, 출력층 방향으로 연결된 전방향(feed forward) 네트워크이다.
대부분의 다층 퍼셉트론의 학습은 역전파 학습 알고리즘을 사용하여 수행할 수 있다. 본 연구에서 사용한 MATLAB 프로그램(Math Works Inc., 2010)은 GD (Gradient Descent), GDM (Gradient Descent with Momentum), GDA (Gradient Descent with Adaptive learning rate), LM (Levenberg- Marquardt) 등과 같은 다양한 학습 알고리즘을 주어진 문제에 따라 선택할 수 있으며, 각 알고리즘에서 요구하는 학습 파라미터를 쉽게 설정하여 학습에 반영할 수 있다. 특히 LM 알고리즘은 비선형 함수들의 제곱의 합과 최소화 함수로 만들어진 Newton 방법을 변형한 것이며, 인공신경망 학습에 매우 잘 맞는 것으로 알려져 있다(Kang et al., 2009). 이 알고리즘은 주어진 입력에 대해 원하는 출력결과를 학습시키고자 할 때 사용하며, 출력층의 각 뉴런에서 발생된 출력오차를 역으로 전파시켜 나가면서 연결링크의 가중치 수정을 통해 오차를 최소화 시킨다. 오차는 목표 값과 인공신경망 학습 결과와의 차이를 나타내며, 오차(error)와 평균 제곱오차(mean square error, MSE)는 Eq. (3)과 Eq. (4)로 정의된다.
 (3)
(3)
 (4)
(4)
여기서, Ti와 Oi는 각각 학습에 사용된 목표 출력과 인공신경망에 의해 학습된 출력을 의미하며, N은 입출력 자료의 수를 나타낸다.
3. 분석결과
3.1 하류부에서의 홍수위 및 보의 저류량 검토
HEC-RAS 수치모형을 적용하여 기존 5개의 고정보와 새로이 계획한 3개의 하단배출형 가동보를 다단 배치했을 경우의 대상구간 하류부의 첨두 홍수위와 유량, 대상구간의 보 설치에 따른 총 저류량을 계산하였다. 하단배출형 가동보가 설치된 지점에서의 각각 6가지 관리수위에 따라 총 216개의 수치모의 결과를 도출하여 인공신경망의 적용을 위한 학습과 검증자료를 구축하였다.
기존 고정보에서 첨두유량은 75.60 m3/s이 하단배출형 가동보의 각 지점의 관리수위의 변화에 따라 대상구간 하류부에서의 첨두유량은 43.72% 증가한 08.65 m3/s에서 91.22%까지 감소한 6.64 m3/s까지로 나타났다. 하류부의 첨두 홍수위는 기존 고정보에서 3.99 El.m, 하단배출형 가동보의 각 지점의 관리수위의 변화에 따라 대상구간 하류단에서의 첨두수위는 5.76% 증가한 4.22 El.m에서 68.28%가 감소한 2.72 El.m까지로 나타났다. 대상구간의 총 저류량은 기존 고정보에서 2,188,474 m3에서 하단배출형 가동보의 각 지점의 관리수위의 변화에 따라 8.9% 감소한 1,993,255 m3에서 216.0%까지 증가한 6,908,683 m3까지로 나타났다(Table 4).
보의 기능인 목표 저류량과 하류부에서의 목표 홍수위를 위한 가동보의 관리수위 결정을 위한 학습과 검증자료는 가동보 설치 지점의 관리수위의 변화에 따라 대상구간의 저류량이 증가 또는 감소하고 그에 상응하는 하류부에서의 첨두 홍수량과 홍수위 저감을 가져온다. 이는 관리수위의 제어를 통해서 대상구간의 목표로 하는 저류량과 하류부에서의 목표 홍수위 결정이 가능함을 보여준다.
Table 4. The flood level and the total storage at the downstream section of the target reach (current condition with weir vs. underflow type of multi-stage movable weir)
 |
3.2 인공신경망 적용
수치모의에 의한 하단배출형 가동보의 관리수위별 대상구간의 하류부 홍수위와 보의 총 저류량은 인공신경망의 적용을 위한 학습과 검증자료로 사용하였다. Table 5는 입력 요소와 출력 요소를 요약한 것이다. 입력 요소로는 하류부 홍수위와 총 저류량, 출력 요소로는 각 가동보의 관리수위이다. 수치모의는 가동도 1의 관리수위를 17.30~19.18 El.m, 가동보 2의 관리수위를 10.53~13.86 El.m, 가동보 5의 관리수위를 4.44~ 8.67 El.m의 조건에서 조합 가능한 경우의 수를 고려하여 수치모의를 진행하였고, 수치모의 결과를 기반으로 각각의 하단배출형 가동보 위치에서 관리수위를 변경시켜 관리수위별 하류부 홍수위와 저류량에 대한 216개의 학습과 검증자료를 구축하였다.
인공신경망의 구조는 입력층(하류단 홍수위, 총 저류량)과 출력층(gate 1, gate 3, gate 5의 관리수위) 사이에 하나의 은닉층이 존재하는 구조이며, 은닉층의 노드 수 조절을 통해 은닉층의 노드수는 10개로 모델을 구축하였다. 은닉층의 노드 수는 노드 수 1~10안에서 은닉층의 뉴런 수의 변화를 주어 학습을 수행하였으며, 수행결과 은닉층의 뉴런 수를 10개로 사용할 경우 학습이 최적화 되는 것으로 검토되었다. 모형의 최대 반복횟수는 1000회, 허용오차는 1E-6으로 설정하였다. 수치모의 결과를 토대로 구축한 모델의 학습결과를 정밀하게 검증하기 위해 MATLAB에서는 총 자료의 60%, 20%, 20%를 임의로 분할하여 각각 학습(training), 검증(validation) 및 시험(testing)에 사용하였다.
Fig. 6은 216개의 학습모델의 학습결과를 검증지표인 평균제곱오차와 결정계수 R2 (coefficient of determination)을 나타낸다. Fig. 6(a)는 인공신경망 모델이 학습을 진행하는 동안 반복횟수에 따른 오차의 수렴기록을 보여준다. 학습, 검증 및 시험에 사용된 자료의 최적의 평균제곱오차가 82번째 반복횟수에서 0.1681 m2로 나타났다. Fig. 6(b)~(d)는 각각 학습, 검증 및 시험에서 얻어지는 예측 결과(예측된 관리수위)와 목표값(관리수위)과의 관계를 나타낸다. 결정계수는 학습, 검증, 시험에서 각각 0.9961, 0.9967, 0.9943로 높게 나타났다.
인공신경망을 이용하여 다단으로 배치된 하단배출형 가동보의 관리수위를 추정할 경우, 목표하는 하류부 홍수위와 저류량에 따라 관리수위 제안이 가능하다.
3.3 적용 결과의 분석
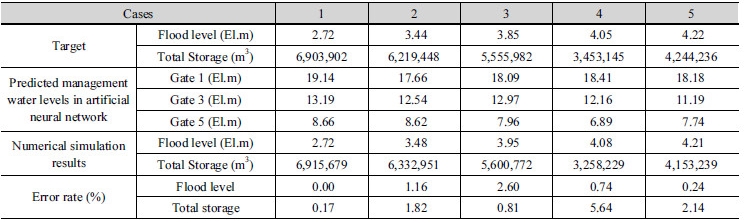
3개 가동보에서의 각각 관리수위에 따른 저류량과 대상구간 하류부의 홍수위와 유량의 모의결과를 이용하여 인공신경망의 적용을 위한 학습, 검증 및 시험을 수행하여 목표 저류량과 대상구간 하류부의 목표 홍수위 조절을 위한 각 가동보의 관리수위 제안에 관한 비교고찰을 수행하였다. Table 6은 임의로 선정한 5가지의 목표 저류량과 대상구간 하류부의 목표 홍수위 조절을 위한 관리수위의 예측과 각각의 가동보에서의 예측한 관리수위에 따른 저류량과 하류부 홍수위에 대한 수치모의 결과를 비교분석한 것이다.
각 Case별 하류단 홍수위는 오차율이 0에서 2.60%의 범위를 보였으며, 총 저류량은 0.17에서 5.64%의 오차율을 보였다. 이를 통하여 인공신경망 모형을 이용한 관리수위 예측결과가 매우 높은 것으로 나타났다. 따라서 인공신경망 모형이 대상구간의 목표 저류량과 하류부의 목표 홍수위 조절을 위한 관리수위 예측은 매우 효율적인 것으로 평가된다.
4. 결 론
상습적으로 홍수범람이 발생하는 치성천 하류구간을 대상으로 하단배출형 가동보를 다단 배치하여 대상구간의 저류량의 증감과 그에 상응한 하류부 홍수위 조절효과를 분석하였다. 인공신경망 기법을 이용하여 하단 배출형 가동보의 설치에 따른 대상구간의 목표 저류량과 하류부의 목표 홍수위에 대응하는 각 가동보의 관리수위 결정방안을 제시하였다.
1)하단배출형 가동보의 각 지점의 관리수위를 변화에 따른 저류량의 변화와 대상구간의 하류부에서의 홍수위를 추정하였다. 하단배출형 가동보의 관리수위가 증가함에 따라 대상구간 하류부에서의 첨두 유량이 91.22%, 첨두 홍수위는 68.28%까지 감소하였다. 또한 대상구간의 총 저류량이 고정보 대비 최대 216%가 증가하였다.
2)수치모의 결과에 의한 학습과 검증자료를 기반으로 인공신경망 모델의 구축과 그에 따른 학습결과의 평균제곱오차는 0.1681 m2로 나타났고, 결정계수가 학습, 검증 및 시험에서 각각 0.9961, 0.9967, 0.9943으로 나타났다.
3)하단배출형 가동보를 설치하였을 때, 대상구간 하류부에서의 목표로 하는 임의의 홍수위와 저류량에 대해 인공신경망 적용에 의해 관리수위를 예측하였다. 예측한 관리수위를 이용하여 대상구간의 저류량과 하류부 홍수위에 대한 수치모의 결과를 목표한 저류량과 하류부 홍수위를 비교분석한 결과, 하류단 홍수위의 오차율이 0에서 2.60%, 총 저류량의 오차율이 0에서 5.64%로 나타났다. 따라서 본 연구에서 제시한 인공신경망 모형은 대상구간의 목표 저류량과 하류부의 목표 홍수위 조절을 위한 가동보의 관리수위를 결정하는 우수한 모형으로 판단된다.
