

1. 서 론
2. 연구지역 및 데이터
2.1 연구지역
2.2 데이터
3. 방법론
3.1 NDWI (Normalized Difference Water Index)
3.2 Swin-Transformer
3.3 Confusion Matrix
4. 연구 결과 및 토의
4.1 수체 탐지 성능 평가
4.2 갈수기 사례 분석
4.3 홍수기 사례 분석
5. 결론 및 요약
1. 서 론
효율적인 수자원 관리와 수재해 예방을 위해서는 지속적인 수계 모니터링이 필수적이다(Russo et al., 2024; Jeong et al., 2021; Kim et al., 2022). 기존의 수계 모니터링은 주로 현장 관측을 통해 수행되고 있다. 이러한 방식은 시간과 비용이 많이 소요되며, 접근이 제한된 지역에서는 관측이 어렵다는 한계점이 존재한다(Lee et al., 2022; Kim et al., 2024a). 현장 관측의 한계점을 보완하기 위해서는 광범위한 지역을 지속적으로 탐지할 수 있는 위성 원격 탐사 자료의 활용이 효과적이다. 특히, 광학 위성 영상은 가시광선 및 적외선 대역의 분광 특성을 활용하여 정밀한 수계 모니터링이 가능하다(Xu et al., 2021; Cordeiro et al., 2021; Kavats et al., 2022).
광학 위성 자료는 가시광선 및 근적외선 대역의 분광 특성을 활용하여, 수체와 식생·토양 등 주변 환경 간의 반사 특성 차이를 구분함으로써 수계 탐지에 효과적이다(McFeeters, 1996). 분광 특성을 보다 효과적으로 활용하기 위해 다양한 분광지수가 제안되었으며, 이는 수체 탐지의 정확도를 높이는 데 널리 활용되고 있다. 대표적으로 Normalized Difference Water Index (NDWI)는 녹색(Green)과 근적외선(Near-Infrared, NIR) 대역의 반사율 차이를 이용하여 수체를 효과적으로 탐지 가능하다(Lee et al., 2023; Kim et al., 2024a). 또한, Modified Normalized Difference Water Index (MNDWI)는 녹색(Green)과 단파적외선(Short-Wave Infrared, SWIR) 대역의 조합을 활용하여 수체 탐지 시 건물이나 토양의 영향을 효과적으로 감소시킬 수 있다(Xu, 2006).
이러한 분광 지수를 활용한 수계 모니터링에는 히스토그램 기반 임계값을 산정하여 수체/비수체를 분류하는 방식에 의존해 왔다(Singh and Kansal, 2022). 대표적인 임계값 기법에는 Otsu, Kittler-Illingworth (KI) 기법이 사용되었다. Otsu 알고리즘은 클래스 내 분산(intra-class variance)을 최소화하고 클래스 간 분산(inter-class variance)을 최대화하는 원리를 기반으로 임계값을 산정한다(Otsu, 1975). Kittler-Illingworth (KI) 알고리즘은 영상의 히스토그램을 두 개의 가우시안 분포로 모델링하고, 분류 오류 확률을 최소화하는 임계값을 산정함으로써 분류 오차를 최소화할 수 있다(Kittler and Illingworth, 1986). 이러한 임계값 알고리즘들은 계산이 단순하고 빠르다는 장점이 있으나, 영상 내 수체와 비수체의 스펙트럼 차이가 뚜렷하지 않거나 면적 비율이 불균형할 경우 정확도가 크게 저하되는 문제가 존재한다(Kim et al., 2024b).
최근 임계값 기반의 수체 탐지의 한계점을 개선하기 위하여 합성곱 신경망(Convolutional Neural Network, CNN) 기반 딥러닝 기법이 주목받고 있다(Yang et al., 2022; Yuan et al., 2023; Kang et al., 2023). CNN 모델은 공간적 패턴을 효과적으로 학습하여 의미론적 분할(semantic segmentation)을 수행할 수 있으며, U-Net과 HRNet이 대표적인 모델이다. U-Net은 인코더-디코더 구조를 통해 다중 규모의 공간 정보를 학습·복원하며, HRNet은 병렬 네트워크 구조를 통해 저·고해상도의 특징을 동시에 결합하여 높은 탐지 성능을 보인다. 그러나 복잡한 지형이나 소규모 지류에서는 여전히 탐지 성능이 저하되는 경향이 있어 모델 개선의 필요성이 제기되고 있다(Feng et al., 2018; Qin et al., 2021; Yu et al., 2022).
최근에는 Transformer 구조가 원격탐사 영상 처리 분야에 적용되고 있다. Transformer는 자연어 처리(Natural Language Processing, NLP) 분야에서 개발된 AI (Artificial Intelligence) 모델로, 입력 데이터를 토큰 단위로 분할한 뒤 각 토큰 간의 관계를 자기 주의(Self-Attention) 메커니즘을 통해 학습한다(Aleissaee et al., 2023). 이 과정에서 장거리 의존성(Long-range dependency)을 효과적으로 학습할 수 있어, 기존의 합성곱신경망(CNN) 구조가 가지는 국소적 학습 특징인 한계를 보완할 수 있다는 장점이 있다. 최근에는 이러한 특징 덕분에 영상 분류, 객체 탐지 등 다양한 원격탐사 영상 처리 분야에서도 Transformer 구조가 적극적으로 도입되고 있다. 그중 Swin- Transformer 모델은 입력 영상을 작은 윈도우 단위로 분할하여 국지적(self-attention) 정보를 학습한다. 이후 윈도우를 주기적으로 이동(shift)시켜 인접 영역과의 상호작용을 가능하게 함으로써 전역적(global attention) 문맥까지 효과적으로 학습할 수 있으며, 이러한 구조적 특성은 복잡한 장면에서도 정밀하고 효과적인 객체 탐지가 가능하다(Bazi et al., 2021). 따라서 Swin-Transformer 모델은 대규모 공간 정보를 포함하는 원격탐사 영상 분석에서 기존 CNN 기반 모델보다 높은 효율성과 정밀도를 제공하는 효과적인 대안으로 주목받고 있다.
기존의 광학 위성 영상 기반 수체 탐지에는 Landsat 시리즈와 Sentinel-2와 같은 광학 위성 자료 기반의 수체 탐지 연구가 진행되고 있다(Choi et al., 2022; Lee et al., 2022; Kim et al., 2024a). 이들 위성 자료는 10-30 m급 공간해상도로 인해 소규모 저수지와 복잡한 지류가 산재한 지역에서의 탐지 한계가 존재한다(Mullen et al., 2023). 이러한 한계를 보완하기 위해, 최근에는 Planet Scope (3.7m), WorldView (0.3-0.5 m)와 같은 고해상도 위성이 수체 탐지 연구에 활용되고 있으며, 중·소규모 수계 탐지에 효율적이다. 특히, 차세대중형위성 1호(CAS500-1)는 2 m 공간해상도를 제공하여 기존 중·저해상도 영상에 비해 소규모 저수지와 하천 지류에서도 수체 경계를 정밀하게 탐지할 수 있다.
이에 본 연구에서는 CAS500-1 영상을 활용하여 Swin-Transformer 기반 수체 탐지 성능을 평가하였다. 먼저, 혼동행렬 지표를 통해 다양한 규모의 저수지에서 정량적 성능을 검증하였다. 이어서, 갈수기 사례를 분석하여 수위 저하와 지형적 특성이 탐지 정확도에 미치는 영향을 평가하였으며, 홍수기 사례에서는 구름 피복과 수위 상승 등 외부 요인이 탐지의 한계로 적용될 수 있는지를 확인하고자 한다. 이러한 일련의 분석은 고해상도 위성 영상과 Swin-Transformer 모델을 기반으로 한 수체 탐지가 홍수나 가뭄과 같은 수재해 상황에서도 효과적으로 적용될 수 있음을 보여준다.
2. 연구지역 및 데이터
2.1 연구지역
본 연구는 한국 중부와 남부에 분포하는 대규모 댐, 중·소규모 저수지, 본류 하천을 대상으로 수행되었다(Fig. 1, Table 1). 대규모 댐 중 경상북도 안동에 위차한 임하댐은 유효저수용량 424,000,000 m3를 보유한 낙동강 수계의 대형 수자원 시설로, 넓은 저수면적을 기반으로 안정적인 수체 탐지가 가능하다. 대곡댐(45,600,000 m3)과 사연댐(20,000,000 m3)은 중규모 댐에 해당하며, 울산광역시와 경상남도 양산시에 위치하여 생활·공업용수 공급 및 지역 수자원 관리 역할을 수행한다. 중·소규모 저수지는 갈전(502,600 m3), 홍양(2,057,400 m3), 이동(20,906,000 m3), 용덕(943,000 m3)으로 구성된다. 이들 저수지는 농업용수 공급을 목적으로 운영되고 있으며, 저수면적이 비교적 작고 주변 토지피복이 다양하게 분포하여, 위성 영상 기반 수체 탐지에서 경계 구분과 소규모 수체의 탐지 정확도를 평가하는 사례로 활용된다.
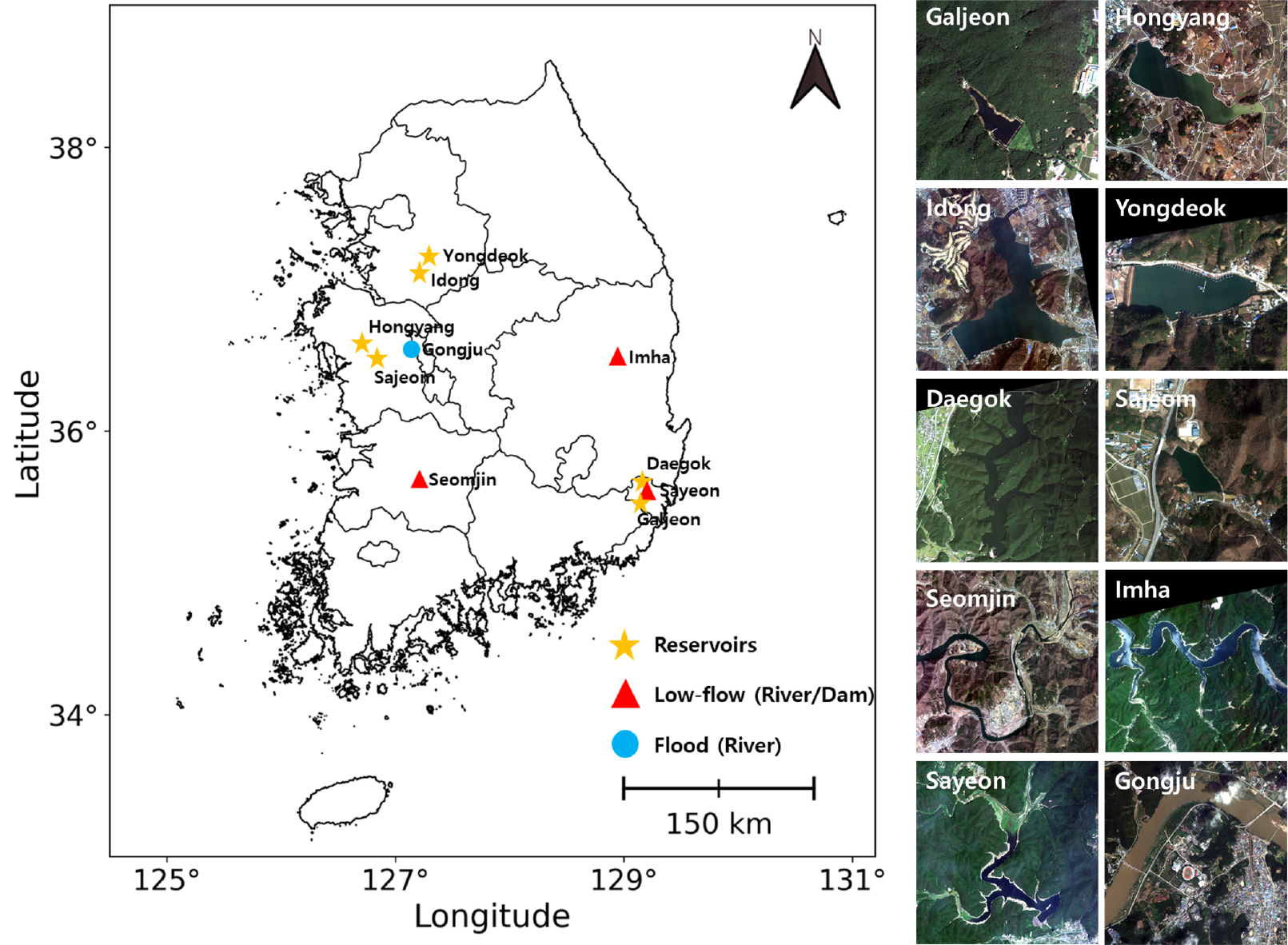
Table 1.
Characteristics of study sites include dams, reservoirs, and rivers
하천 구간은 섬진강과 금강 본류(공주보)를 대상으로 하였다. 섬진강은 전라북도, 전라남도, 경상남도를 흐르며 남해로 유입되는 하천으로, 유역면적은 약 4,896 km2에 달한다. 금강은 충청권을 지나는 주요 하천으로 유역면적은 약 9,859 km2 이며, 공주보 일대는 하상 변화와 모래톱 분포가 뚜렷하게 나타나는 구간이다. 이러한 조건은 수위 변동뿐만 아니라 하천 지형적 특성이 수체 탐지 정확도에 미치는 영향을 확인하는데 적합하다.
따라서 본 연구의 분석 대상은 대규모 댐(임하, 대곡, 사연), 중·소규모 저수지(갈전, 홍양, 이동, 용덕), 그리고 본류 하천(섬진강, 금강)으로 구성되며, CAS500-1 영상과 Swin- Transformer 모델의 탐지 성능을 다양한 수체 환경에서 검증할 수 있는 근거를 제공한다.
2.2 데이터
2.2.1 Remote sensing imagery (CAS500-1)
차세대중형위성 1호는 대한민국 항공우주연구원(Korea Aerospace Research Institute, KARI)이 주관하고 국내 산업체가 참여하여 개발한 고해상도 지구관측 위성 시리즈이다. 본 위성은 국토 관리, 자원 모니터링, 재난 대응 등 국가적 수요에 최적화된 설계로 제작되었으며, 고해상도 영상자료의 안정적 확보를 통해 공공 및 민간 분야의 활용 기반을 제공한다. 이 시리즈의 첫 번째 기체인 CAS500-1은 2021년 발사 이후 임무를 수행 중이며, 약 500 km 고도의 태양동기궤도(Sun-Synchronous Orbit, SSO)에서 하루 약 16회 공전하며 평균 4-5일 수준의 재방문 주기를 갖는다. 탑재체는 고해상도 전자광학 카메라로, 0.5 m급 Panchromatic (PAN) 영상과 2.0 m급 Multispectral (MS) 영상을 제공한다. 다중분광 밴드는 Red, Green, Blue, Near-infrared (NIR) 4개로 구성되어 있어, 수체 탐지 및 토지피복 분석에 활용이 가능하다(Table 2). 관측 폭은 약 12 km로 제한적이지만, 정밀한 공간 정보를 제공하여 중·소규모 하천, 도시 수계, 농업용 저수지 등 세밀한 모니터링에 적합하다.
Table 2.
Technical specifications of CAS500-1 satellite (PAN: panchromatic band, 2.5 m; MS: multispectral bands—R, G, B, NIR, 5 m)
본 연구에서는 기하보정 및 대기보정이 적용된 Level-2G 데이터를 활용하여 고해상도의 수체 탐지 성능을 검증하였으며, 해당 데이터는 국가지리정보원(https://www.ngii.go.kr/kor/main.do)에서 제공된다.
2.2.2 검증자료
본 연구에서는 CAS500-1 영상을 활용한 수체 탐지 알고리즘의 성능을 정량적으로 평가하기 위해 참조용 수동 마스크(Manual Mask)를 구축하였다. 마스크 제작은 ENVI 5.6.3 소프트웨어를 이용하여 수행하였으며, 수체와 비수체 간의 분광 특성이 뚜렷하게 구분되는 4번 밴드(Near-infrared, NIR)를 주요 기준으로 적용하였다. 라벨링 과정에서는 ENVI의 관심영역(Region of Interest, ROI) 도구를 활용하여 다각형(Polygon) 형태로 수체 영역을 지정하였다. 이후 Magic Wand 반자동 분할 기능을 이용하여 스펙트럼 특성이 유사한 영역을 확장하였으며, 도시 지역 및 산지에서는 인공 구조물이나 그림자와 같은 혼동 요소를 보완하기 위해 Google Earth 영상과 토지피복 자료를 함께 참고하였다. 최종적으로 구축된 수동 마스크는 픽셀 단위의 수체/비수체 이진 분류 정보를 포함하며, 딥러닝 모델의 정확도를 검증하는 데 활용되었다.
3. 방법론
3.1 NDWI (Normalized Difference Water Index)
본 연구에서는 차세대중형위성-1호(CAS500-1) 영상으로부터 Normalized Difference Water Index (NDWI)를 산출하여 수체 탐지의 주요 변수로 활용하였다(Singh and Kansal, 2022). NDWI는 수체와 비수체 간의 분광 반사율 차이를 이용해 수체를 탐지하는 대표적인 지수로, 녹색(Green) 밴드와 근적외선(Near-Infrared, NIR) 밴드를 조합하여 Eq. (1)과 같이 정의된다.
NDWI 지수는 수체가 근적외선 파장에서 강한 흡수 특성을 보이고, 녹색 파장에서 상대적으로 높은 반사율을 나타내는 특성에 기반한다. 반대로 식생이나 토양과 같은 비수체는 근적외선에서 높은 반사율을 보이므로, NDWI는 수체와 주변 지표 피복을 효과적으로 구분하는 데 유용하다(McFeeters, 1996; Du et al., 2016). CAS500-1은 2.0 m 공간해상도의 Green 및 NIR 밴드를 제공하므로, NDWI 산출 시 소규모 저수지, 도심 수로, 복잡한 지류 등 세밀한 수계 모니터링에 적용할 수 있다. NDWI 값은 일반적으로 -1에서 1 사이에 분포하며, 수체는 대체로 0 이상, 비수체는 0 이하의 값을 보인다. 그러나 그림자, 토양, 인공 구조물 등에서는 수체와 유사한 값이 나타나는 한계가 있다. 이러한 한계에도 불구하고 NDWI는 단순한 밴드 조합을 통해 계산 가능하면서도 높은 효율성을 보여, 수체 탐지에 널리 활용될 수 있다.
3.2 Swin-Transformer
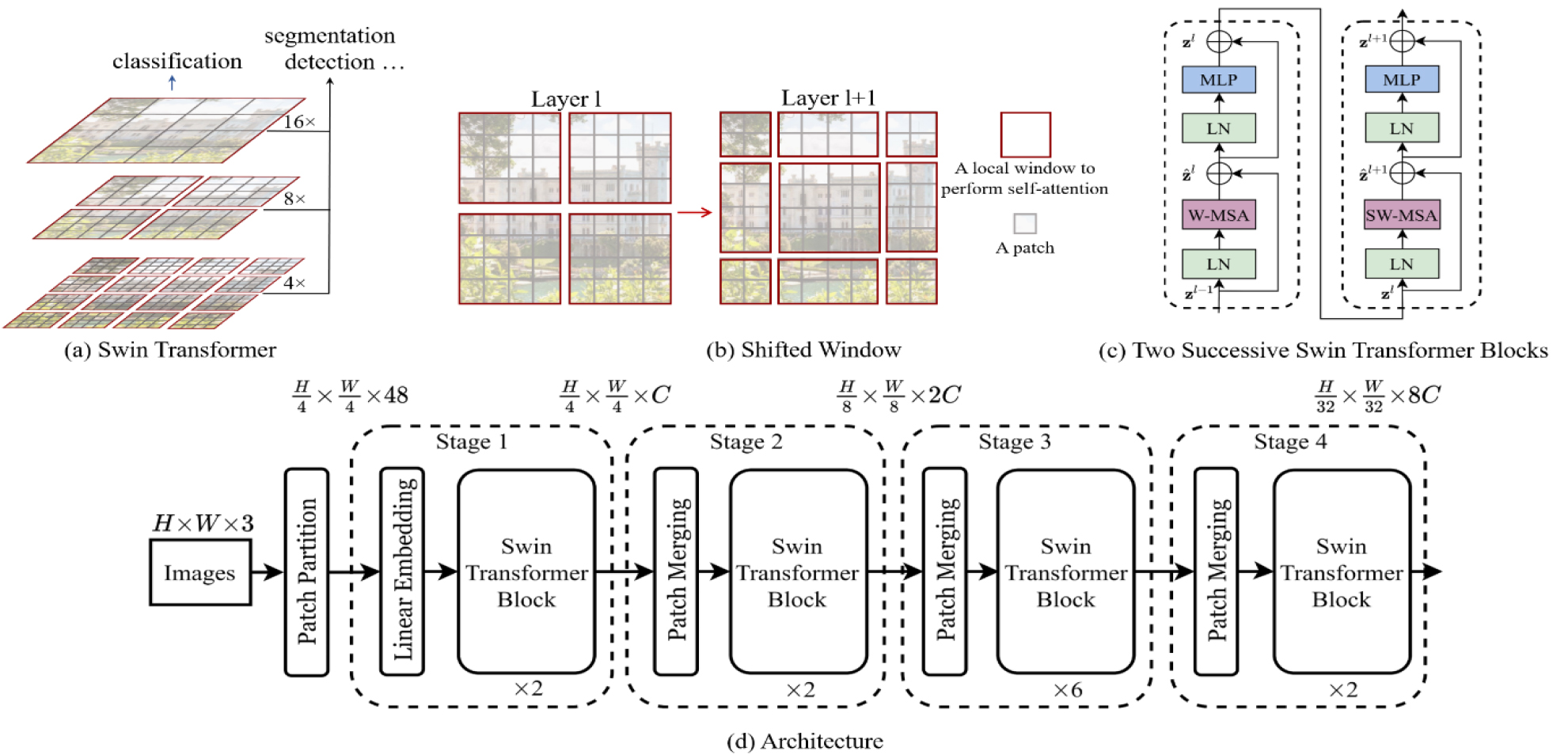
Swin-Transformer는 입력 영상을 균일한 크기의 윈도우로 분할 후 각 윈도우 내부에서 self-attention을 수행하고, 후속 블록에서 윈도우 위치를 이동(shift)시켜 서로 다른 윈도우 간 문맥을 교환하도록 설계된 계층형 비전 Transformer이다(Liu et al., 2021). 계층 단계를 거치며 patch merging으로 해상도를 단계적으로 축소하고 채널 폭을 확장하여 다중 규모 특징을 학습하며, 전역 self-attention 대비 연산량을 크게 줄인다(Fig. 2). 모델의 핵심 구성요소는 (i) 계층적 표현, (ii) 윈도우 기반 self-attention (W-MSA), (iii) Shifted Windows (SW-MSA)로 요약된다.
(i) 계층적 표현(Hierarchical representation)은 패치 임베딩 이후 계층 단계를 거치며 patch merging을 적용해 해상도를 점진적으로 낮추고 채널 폭을 확장한다. 이 과정에서 고해상도 단계는 하천·수로의 미세 경계와 얕은 수면 패턴을 보존하고, 저해상도 단계는 배경 토지피복과 지류 연결성 등 전역 문맥을 학습한다.
(ii) 윈도우 기반 self-attention (W-MSA)은 self-attention 계산을 비중첩 로컬 윈도우로 한정함으로써, 2 m급 CAS500-1과 같은 고해상도 영상 처리에서 연산·메모리 부담을 현저히 줄인다. 윈도우 내 국지적 상관을 정밀하게 학습하여 세밀한 수체 경계를 안정적으로 모델링한다.
(iii) Shifted Windows (SW-MSA)는 연속 블록에서 윈도우를 일정 픽셀만큼 이동시켜, 이전에 서로 다른 윈도우에 속했던 토큰 간 상호작용을 유도한다. 이로써 윈도우 경계에서 발생하는 문맥 단절이 완화되고, 인접 영역 정보가 연속적으로 결합된다.
여러 계층에서 추출한 다중 해상도 특징은 디코더에서 업샘플링과 결합을 거쳐 단일 해상도의 예측맵으로 변환되며, 픽셀 단위의 이진 마스크가 산출된다. 본 연구에서는 정사·대기보정이 완료된 CAS500-1 L2G 영상을 512×512 타일로 분할하여 학습에 활용하였다. 입력 밴드는 Green, NIR, 그리고 이들로부터 산출한 NDWI를 조합하여 총 3채널(Green-NDWI-NIR)을 구성하였다(Kim et al., 2024a). NDWI는 수체와 비수체 간의 분광 대비를 강화하여 경계 인식 성능을 높이는 데 효과적이며, 기존 RGB 조합 대비 수체 탐지의 안정성을 향상시킨다. 데이터셋 분할은 train/validation/test=8:1:1로 수행하였다. 또한 본 연구에서는 장면 단위가 아닌 타일 단위 분할을 적용하였기 때문에 동일 장면 내 인접 타일 간 공간적 상관성이 성능을 과대평가할 수 있다는 점을 고려하였으며, 이를 완화하기 위해 train/validation/test 타일은 동일 장면에서도 서로 다른 공간 영역에서 추출되도록 구성하였다. 학습 과정은 AdamW optimizer와 Cross-Entropy Loss를 사용하였으며, batch size=2, 40,000 iterations으로 모델을 학습하였다.
3.3 Confusion Matrix
수체 탐지 결과의 정량적 평가는 혼동 행렬(confusion matrix)에 기반하여 수행하였다. 혼동 행렬은 예측과 정답(ground truth)의 일치 여부를 픽셀 단위에서 네 범주로 구분한다. TP (True Positive)는 정답과 예측이 모두 수체, TN (True Negative)는 모두 비수체, FP (False Positive)는 실제 비수체를 수체로 잘못 예측한 경우, FN (False Negative)는 실제 수체를 비수체로 잘못 예측한 경우를 의미한다. 분류 단위는 픽셀이며 목표 클래스는 수체와 비수체 두 가지로 설정하였다. 사용 지표는 Accuracy, Precision, Recall, F1-score, IoU이며 정의는 Eqs. (2), (3), (4), (5), (6)에 따른다.
Accuracy는 전체 분류의 전반적 정합도를 요약하지만 비수체가 우세한 장면에서는 클래스 불균형으로 과대평가될 수 있다. Precision은 모델이 수체로 예측한 항목 중 실제 수체의 비율을, Recall은 실제 수체 중 모델이 찾아낸 비율을 나타내며, F1-score는 두 지표의 조화 평균으로 균형 성능을 제공한다. IoU (Intersection over Union)는 예측 수체와 정답 수체의 겹침 정도를 직접 측정하여 공간적 일치도를 평가한다. 평가 절차는 각 모델의 픽셀 단위 예측을 3.2절의 수동 마스크와 대조하여 혼동 행렬을 구성하고 지표를 산출하는 방식으로 진행하였다.
4. 연구 결과 및 토의
4.1 수체 탐지 성능 평가
본 절은 CAS500-1 영상으로 학습된 Swin-Transformer의 수체 분할 성능을 혼동행렬 기반 지표를 사용하여 정량적으로 평가하였으며, CASE 별로 여섯 사례(CASE 1-6)의 결과를 정리하였다(Fig. 3). 전반적으로 모델은 IoU=0.95 ~ 0.97으로 높은 정확도가 나타났으며, 소·중·대규모 저수지에서 우수한 수체 경계 탐지를 보였다(Table 3). CASE 1은 울산광역시 갈전저수지로, 2024년 7월 13일 촬영된 영상에서 분석이 수행되었다. 주변 토지피복이 산지로 구성된 소형 저수지로, 사면 그림자에 따른 혼동 픽셀이 일부 존재하였으나 IoU=0.97, Precision=0.99, Recall=0.97, F1-score=0.98을 보였고, 경계 누락과 인접부의 혼동 픽셀은 드물게 나타났다. CASE 3은 울산광역시 대곡댐으로, 2024년 7월 13일에 촬영된 영상이다. 경사 사면의 그림자와 수체 접경부가 혼재한 복잡한 환경에서도 IoU=0.95, Precision=0.94, Recall=0.99, F1-score=0.97을 기록하며 우수한 탐지 성능을 보였다. CASE 5와 CASE 6은 각각 2024년 11월 18일 촬영된 경기도 용인시 용덕저수지와 2025년 3월 6일 촬영된 충청남도 홍성군 사점저수지를 대상으로 분석되었다. 두 지역 모두 산업 및 도로 시설이 인접한 저수지로, 인공 구조물의 강한 반사 특성과 음영이 존재함에도 IoU=0.94-0.95, Precision=0.95, Recall=0.99, F1-score= 0.97로 일관된 탐지 성능을 나타냈다.
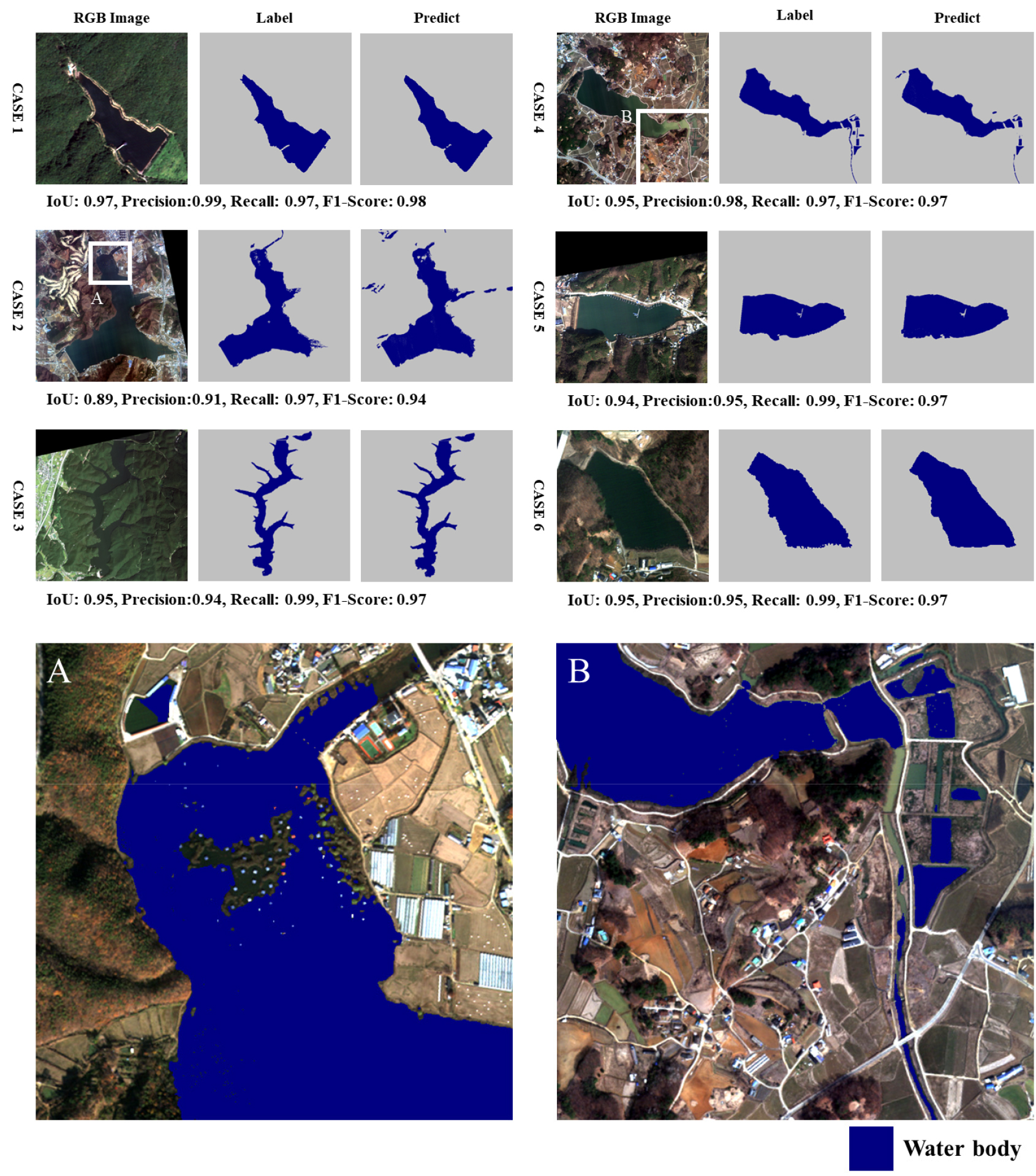
Table 3.
Quantitative performance metrics of water body detection for the six cases presented in Fig. 3
| CASE | IoU | Precision | Recall | F1-score |
| CASE 1 | 0.97 | 0.99 | 0.97 | 0.98 |
| CASE 2 | 0.89 | 0.91 | 0.97 | 0.94 |
| CASE 3 | 0.95 | 0.94 | 0.99 | 0.97 |
| CASE 4 | 0.95 | 0.98 | 0.97 | 0.97 |
| CASE 5 | 0.94 | 0.95 | 0.99 | 0.97 |
| CASE 6 | 0.95 | 0.95 | 0.99 | 0.97 |
반면 복잡한 환경 조건에서는 탐지 정확도에 한계가 확인되었다. CASE 2-A는 2024년 11월 18일 촬영된 경기도 용인시 이동저수지 영상으로, 수면 위 부유물과 소형 선박으로 인해 수체의 분광 반사 특성이 불균형하게 나타났다. 이로 인해 일부 구간에서 일관된 수체 분류가 이루어지지 않았으며, Precision=0.91, Recall=0.97, F1-score=0.94, IoU=0.89의 결과가 도출되었다. CASE 4-B는 2025년 3월 6일 촬영된 충청남도 홍성군 홍양저수지 영상으로, 폭이 좁은 수로 주변에 교량과 도로 포장면, 그림자가 인접하여 탐지의 연속성이 단절되거나 일부 구간이 비수체로 분류되는 현상이 확인되었다(Yang et al., 2024). 전반 지표는 Precision=0.98, Recall=0.97, F1-score=0.97, IoU=0.95로 산정되었다.
사례 지점을 특성별로 확인해 보면, 저수지 기반의 면형 수체에서는 배경 대비와 경계가 뚜렷해 IoU와 F1-score가 높고 변동도 낮게 나타났다. 이에 비해 내부에 부유 구조물·소형 선박 등이 분포한 저수지의 경우에는 수면 반사 특성이 공간적으로 불균형해 임계값 설정에 따라 Precision & Recall의 균형이 민감하게 반응했다. 또한 폭이 좁은 지류가 도로·교량·소형 저류지와 인접한 지점은 경계 인접부에서 탐지 성능이 저하되어 탐지의 연속성이 끊기는 현상이 확인되었다.
본 연구에서 Swin-Transformer는 CAS500-1 영상 기반 수체 탐지에서 전반적으로 높은 정확도를 보였으며, 특히 경계부 혼동이 빈번한 산림·그림자 인접 지역에서도 높은 정밀도를 보였다. 그러나 부유물과 선박이 존재하는 저수지, 교량·도로와 인접한 지류에서는 반사 특성이 일정하지 않고 인공 구조물의 반사 간섭으로 인해 탐지 성능이 저하되었으며, 이는 단일 시점 영상에 기반한 분류의 구조적 한계로 판단된다. 이러한 결과는 고해상도 위성 영상을 활용한 수체 탐지에서 Transformer 계열 모델의 적용 가능성을 확인하는 동시에, 복잡한 환경 조건에서의 성능 저하 문제를 해결하기 위한 다중시기 영상 분석의 필요성을 나타낸다(Russo et al., 2024).
4.2 갈수기 사례 분석
본 절에서는 CAS500-1 영상을 대상으로 Swin-Transformer를 적용한 수체 탐지 결과를 사례별로 분석하였다(Fig. 4, Table 4). 앞선 4.1절에서는 정량적 평가로 모델의 전반적인 성능을 보여주었다면, 본 절에서는 지점별 평수기와 갈수기 상황에서 나타난 특성과 A (CASE 1), B (CASE 3) 영상을 통해 확인된 세부적인 특성을 중점으로 분석하였다.
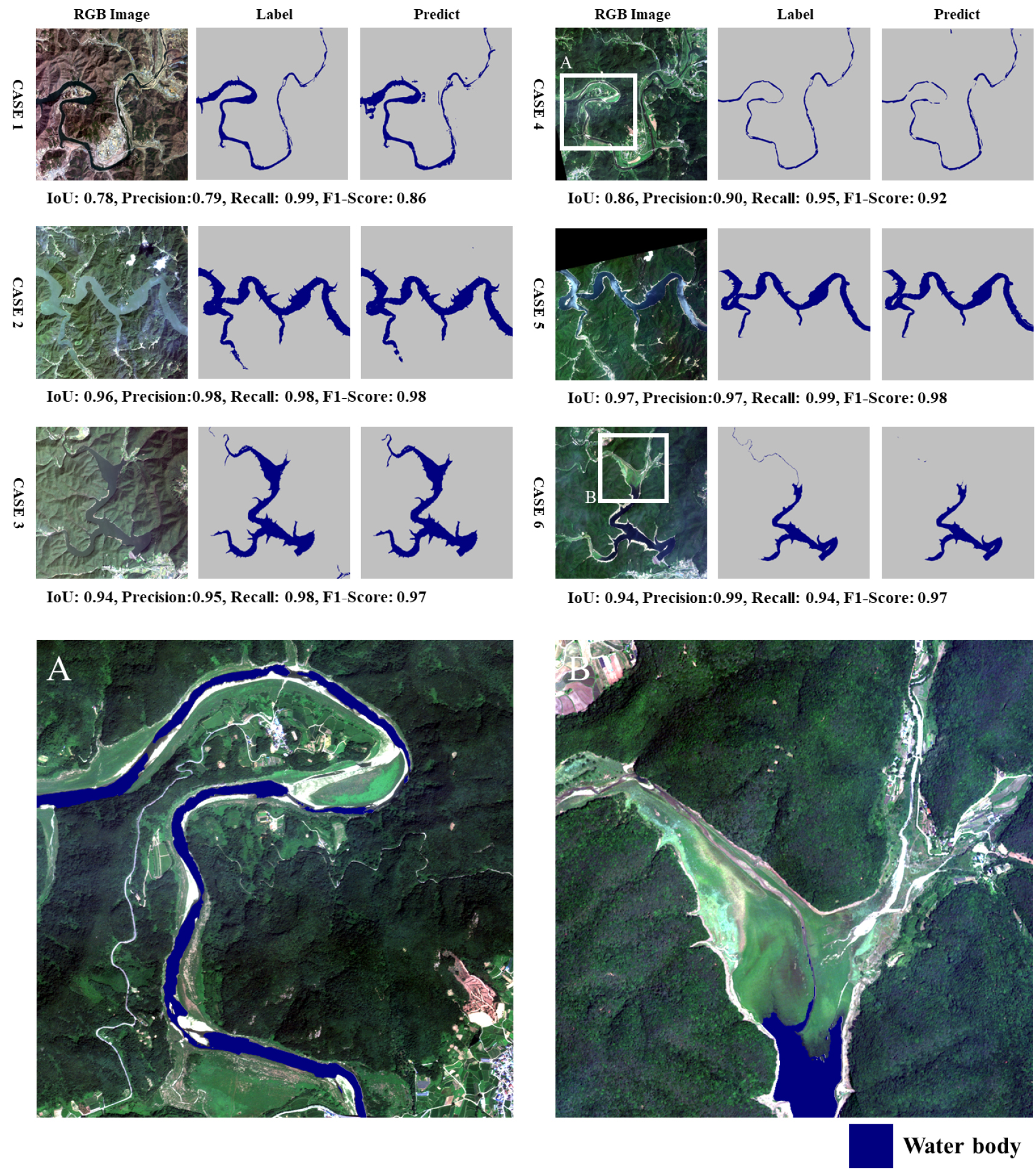
Table 4.
Quantitative performance metrics of water body detection for the six cases presented in Fig. 4
| Case | IoU | Precision | Recall | F1-score |
| CASE 1 | 0.78 | 0.79 | 0.99 | 0.86 |
| CASE 2 | 0.96 | 0.98 | 0.98 | 0.98 |
| CASE 3 | 0.94 | 0.95 | 0.98 | 0.97 |
| CASE 4 | 0.86 | 0.90 | 0.95 | 0.92 |
| CASE 5 | 0.97 | 0.97 | 0.99 | 0.98 |
| CASE 6 | 0.94 | 0.99 | 0.94 | 0.97 |
첫 번째 사례는 섬진강 곡류부로, 산지 지형에 위치한 하천 구간이다. 평수기 영상(CASE 1, 2022년 8월 29일 촬영)에서는 Recall=0.99로 대부분의 수체를 정확히 탐지하였으나, Precision=0.79와 IoU=0.78로 상대적으로 낮은 결과를 보였다. 이는 곡류 외측 사면의 그림자가 수체 픽셀과 혼동되어 과대 탐지가 발생한 결과로 해석된다. 반면 갈수기 영상(CASE 4, 2025년 3월 17일 촬영)에서는 Precision=0.90, IoU=0.86으로 나타나며, 수위 저하로 인해 수변 경계가 보다 명확해진 특성이 반영된 것으로 판단된다. 확대된 A 영역은 갈수기 장면(CASE 4)에 해당하며, 지류 모래톱의 노출이 관찰된다. 모래톱의 분광 특성이 수체와 유사하여 일부 혼동이 발생하였음에도 불구하고, 모델은 대체로 올바른 탐지를 수행하였다(Zhao et al., 2025). 다만 경계 일부 픽셀이 수체로 잘못 분류되면서 IoU 개선 폭은 제한적이었다. 이러한 탐지 결과는 2022년 하반기 섬진강 유역에서 실제로 발생한 갈수 현상과도 밀접하게 관련된다. 당시 광주·전남 지역의 연 누적 강수량은 평년의 약 61% 수준에 불과하였으며, 기상청은 유역 내 주요 하천의 수위가 장기간 낮게 유지되었다고 보고하였다.
두 번째 사례는 경상북도 안동시 임하호로, 대규모 저수지에 해당한다. 평수기 영상(CASE 2, 2023년 10월 2일 촬영)과 갈수기 영상(CASE 5, 2022년 5월 23일 촬영) 모두에서 안정적인 탐지 성능을 보였다. 평수기 영상에서는 IoU=0.96, Precision=0.98, Recall=0.98, F1-score=0.98을 기록하였으며, 갈수기에도 IoU=0.97과 Recall=0.99로 거의 동일한 수준이 유지되었다. 이는 수면 면적이 넓고 경계가 명확하여 주변 환경의 영향을 상대적으로 적게 받은 결과로 해석된다. 다만 평수기 영상에서는 일부 지류 말단과 수로가 협소한 구간에서 탐지되지 않는 현상이 관찰되었는데, 이는 좁은 수로가 주변 산림 및 토양과 인접하여 경계 구분이 어려워진 데에 기인한 것으로 판단된다. 이러한 탐지 누락은 좁은 지류의 폭이 CAS500-1의 공간해상도(2.5 m)에 근접하여 한 픽셀 내에 수체와 주변 토지피복이 동시에 포함되는 공간적 해상도 한계에서 비롯될 수 있다. 또한 수체·토양·식생이 혼합되어 나타나는 스펙트럼 혼합 효과로 인해 NDWI 기반 수체·비수체 대비가 약화되며, NDWI는 폭이 좁거나 탁도가 높은 수체에서 민감도가 감소하는 경향이 있어 경계부 픽셀에서 분류의 불안정성이 증가할 수 있다. 이와 같은 요인들이 복합적으로 작용하면서 일부 지류 말단 구간에서 탐지 누락이 발생한 것으로 해석된다. 해당 탐지 결과는 당시 임하호의 수위 변동 상황과도 밀접하게 관련된다. 실제로 2022년 영남 내륙 지역은 강수 부족이 장기간 지속되면서 안동 임하호의 저수율이 크게 하락하였고, 농업 및 생활용수 공급에도 어려움이 발생한 것으로 보고되었다.
세 번째 사례는 울산광역시 사연댐으로, 산지 지형에 위치한 중규모 저수지이다. 평수기 영상(CASE 3, 2023년 10월 20일 촬영)에서는 IoU=0.94, Precision=0.95, Recall=0.98, F1- score=0.97을 기록하며 안정적인 탐지 성능을 보였다. 반면 갈수기 영상(CASE 6, 2022년 6월 17일 촬영)에서는 Precision= 0.99로 상승한 반면 Recall=0.94로 낮아져 일부 수체 탐지의 누락이 발생하였다. 이는 상류부 수위가 크게 하락하면서 수면 폭이 급격히 좁아지고 불규칙한 경계가 형성된 결과로 해석된다. 확대된 B 영상은 갈수기 장면(CASE 6)에 해당하며, 저수지 상류 구간에서 수위 저하로 바닥이 노출되면서 경계부가 불규칙하게 나타났다. 이로 인해 수체의 연속성이 부분적으로 단절되는 현상이 관찰되었으나, 하류 구간은 상대적으로 안정적인 수심을 유지하여 탐지 결과가 안정적으로 나타났다. 전체적으로 F1-score=0.97로 유지되며, 영상 분석 결과는 단순한 수치 비교를 넘어 실제 수위 변화를 직접적으로 반영한다.
특히 이러한 결과는 2022년 울산 지역에서 기록된 심각한 가뭄 상황과 밀접하게 관련된다. 울산은 2022년 한 해 동안 기상 가뭄 발생일수 총 192일로 집계되어 관측 이래 최장 기간을 기록하였다. 이로 인해 지역 내 주요 저수지의 수위가 장기간 낮게 유지되었으며, 사연댐 또한 상류부에서 저수 면적이 현저히 축소된 것으로 확인되었다.
사례 분석을 종합하면, Swin-Transformer는 대규모 저수지에서는 평수기와 갈수기 모두 안정적인 탐지 성능을 보인 반면, 섬진강 곡류부나 사연댐 상류부와 같이 지형적 요인이 크게 영향을 미치는 구간에서는 갈수기 수위 저하로 인해 탐지 성능이 부분적으로 저하되었다. 이와 같은 분석 결과는 모델의 정량적 정확도는 가뭄 조건에서 저하되지만, 수면 축소 범위나 형상 변화와 같은 공간적 변화 양상은 일정 수준에서 식별 가능함을 의미한다. 위성 기반 수체 탐지는 가뭄 상황의 세밀한 정량적 변화까지는 한계가 있으나, 전반적인 공간적 경향은 반영할 수 있어 향후 수자원 모니터링 및 가뭄 영향 평가에 참고 자료로 활용될 수 있다(Tesfaye and Breuer, 2025).
4.3 홍수기 사례 분석
본 절에서는 CAS500-1 영상을 활용하여 Swin-Transformer 기반 홍수기 수체 탐지 결과를 분석하였다(Fig. 5, Table 5). 홍수기는 강우 유입, 수위 상승, 구름 피복과 같은 다양한 외부 요인이 동시에 작용하는 시기로, 탐지 성능에 영향을 줄 수 있다. 따라서 홍수기 조건에서 나타난 탐지 특성과 한계를 검토하였다.
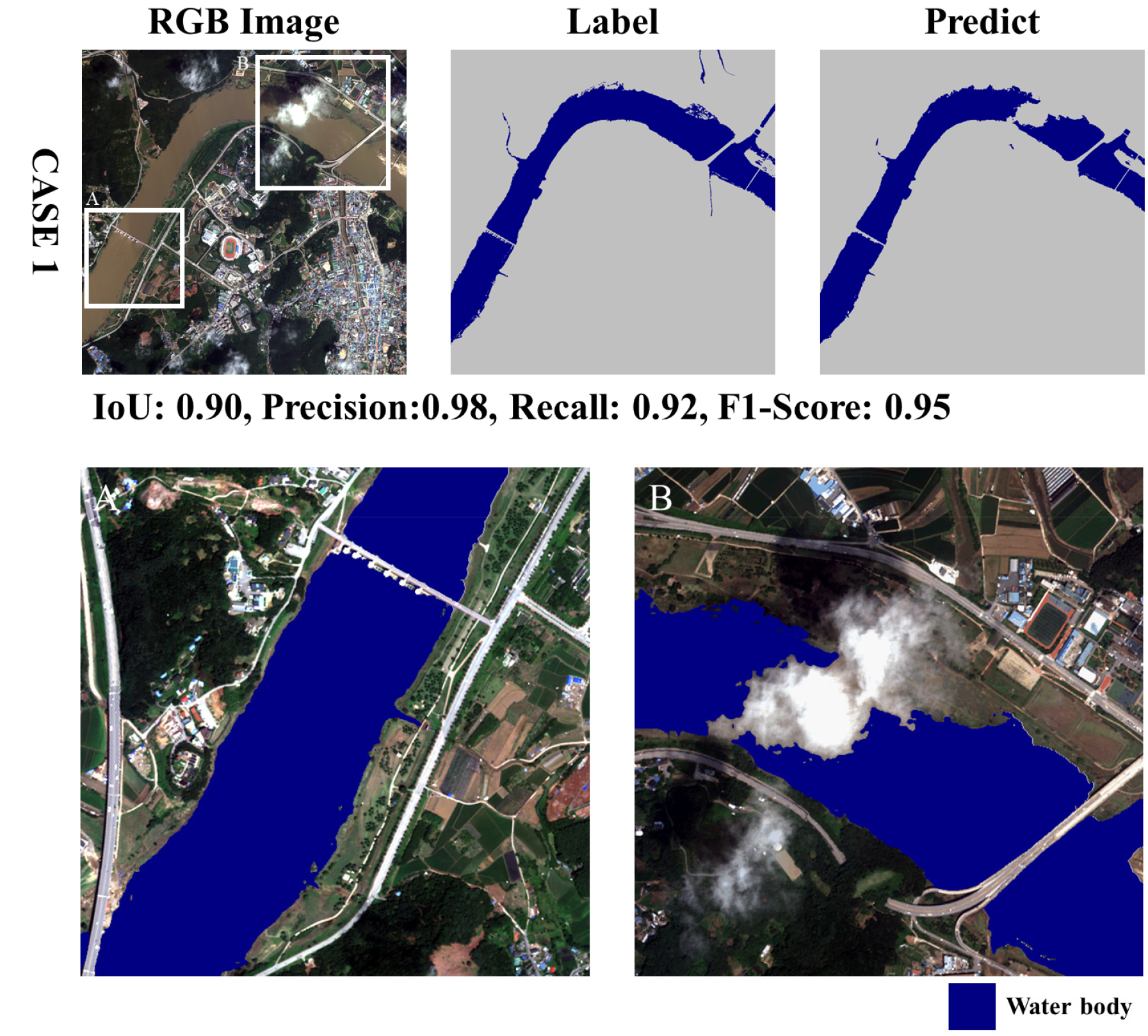
Table 5.
Quantitative performance metrics of water body detection for the flood case presented in Fig. 5
| Case | IoU | Precision | Recall | F1-score |
| CASE 1 | 0.90 | 0.98 | 0.92 | 0.95 |
CASE 1은 충청남도 공주시 금강 본류에 위치한 공주보 구간으로, 2023년 7월 19일 홍수기에 촬영된 장면이다. 전체 탐지 지표는 IoU=0.90, Precision=0.98, Recall=0.92, F1-score =0.95로 일정 수준 이상의 성능을 보였으나, 세부적으로는 일부 탐지 한계가 확인되었다. 이는 동일 모델이 정상 수문 조건에서 보인 IoU 약 0.95-0.97 대비 다소 낮은 수치로, 홍수 상황에서 반사 특성 변화와 구름·탁수 등 환경 요인이 복합적으로 작용하면서 상대적 성능 저하가 나타난 결과로 해석된다. 확대 영상 A에서는 구름이 수면을 부분적으로 가리면서 실제 수체에 대한 미탐지와 비수체로 잘못 탐지되는 오탐지 현상이 발생하였다(Zhu and Woodcock, 2012). 이는 구름 반사가 수체와 유사한 분광 반사 특성을 보이거나, 피복으로 인해 탐지가 제한되어 경계가 불명확해진 결과로 해석된다. 확대 영상 B에서는 수위 상승으로 인해 수체 가장자리에서 주변 토지피복 간의 경계가 불분명해져 경계 픽셀의 분류 정확도가 낮아졌다. 또한 지류 구간에서는 Label 대비 Predict 결과에서 미탐지가 발생하였으며, 특히 홍수로 인한 부유물이 유입된 수체와 비수체 간의 분광 대비가 약화되면서 탐지 성능 저하가 심화된 것으로 판단된다. 이러한 탐지 결과는 실제 홍수 상황과도 밀접하게 관련된다. 2023년 7월 중순 충청권 금강 유역에는 시간당 60~70 mm의 집중호우가 이어지며 홍수경보가 발효되었고, 공주보 인근 저지대에서는 하천 범람으로 도로와 시설이 침수되고 주민 대피가 발생하였다.
이러한 사례에서 확인된 탐지 한계는 홍수기 환경에 따른 분광 특성 변화와 직접적으로 관련된다. 산지 사면의 그림자는 가시광선 및 NIR 영역에서 낮은 반사도를 보여 수체와 유사한 스펙트럼을 형성하며, 이는 NDWI 대비를 약화시켜 과대 탐지(False Positive)를 유발할 수 있다. 반대로 홍수기 탁수는 부유물 및 토사 유입으로 인해 녹색 및 NIR 대역의 반사도가 증가하면서 실제 수체임에도 NDWI 값이 낮아져 비수체로 잘못 분류되는 현상이 발생한다. 이러한 분광적 요인은 경계부에서의 탐지 누락, 불연속적 수체 분류 등 모델 성능 저하로 이어질 수 있다.
이러한 한계를 완화하기 위해 다중시기 영상의 결합을 통해 일시적 환경 변화의 영향을 보정하고, 구름·탁수 조건에서도 안정적인 탐지가 가능한 SAR 보조자료의 활용, 그림자 마스킹 및 MNDWI와 같은 대체 분광지수 적용 등이 효과적인 보완 방안으로 고려될 수 있다.
본 연구의 홍수기 영상에서 나타난 구름 피복, 불명확한 수체 경계, 지류 구간의 탐지 누락은 이러한 피해 사례와 직접적으로 연계되어 해석될 수 있으며, 이는 위성 영상 기반 수체 탐지가 극한 강우 조건에서 발생하는 수문학적 변화를 효과적으로 반영할 수 있음을 보여준다. 또한 고해상도 영상에서 확인된 일부 탐지 한계는 향후 홍수 피해를 예측하거나 위험 지역을 파악하는 과정에서 추가적인 개선의 필요성을 보여주며, 위성 자료를 활용한 재해 모니터링의 활용 가치를 높이는 근거가 된다.
5. 결론 및 요약
본 연구에서는 CAS500-1 영상을 대상으로 Swin-Transformer 모델을 적용하여 수체 탐지 성능을 평가하고, 갈수기 및 홍수기 사례를 통해 실제 수문학적 상황에서의 활용 가능성을 검토하였다. 본 연구의 주요 결과는 다음과 같이 정리할 수 있다.
(1) 정량적 성능 검증에서는 혼동행렬 지표 기반 평가 결과, Swin-Transformer가 다양한 규모의 저수지에서 IoU= 0.94-0.97, F1-score=0.97-0.98 수준의 높은 정확도를 기록하였다. 이는 기존 임계값 기반 탐지 기법 대비 뚜렷한 성능 향상을 보여주며, 고해상도 위성 영상 기반 수체 탐지의 정밀성을 입증한다.
(2) 갈수기 특성 분석에서는 섬진강 및 임하호 사례에서 확인된 바와 같이, 수위 저하로 인한 수변 경계의 변화와 모래톱·지류 협소부 등 지형적 요인이 Precision과 Recall 변동에 영향을 미쳤다. 특히 좁은 지류에서는 주변 토지피복과의 대비가 약화되며 탐지 누락이 발생하였으나, 대규모 저수지에서는 안정적인 탐지 성능이 유지되었다.
(3) 홍수기 특성 분석에서는 금강 공주보 사례에서 구름 피복과 탁한 수색, 수위 상승으로 인한 경계 불명확화가 탐지 성능 저하로 이어졌다. Label과 Predict 비교 결과, 지류 구간에서의 미탐지 및 경계부 분류 오류가 확인되었으며, 이는 극한 강우 상황에서의 탐지 한계를 보여주는 사례로 해석된다.
종합하면, Swin-Transformer는 CAS500-1 영상 기반 수체 탐지에서 안정적이고 높은 정확도를 확보하였으며, 갈수기와 홍수기와 같은 극한 수문학적 조건에서도 일정 수준 이상의 성능을 유지하였다. 그러나 구름, 그림자, 탁수와 같은 환경적 요인은 여전히 탐지 성능 저하를 유발하는 주요 요인으로 확인되었다. 이러한 결과는 정체 수체인 저수지와 유동형 수체인 하천에서 모델의 적용성이 다르게 나타날 수 있음을 시사한다. 저수지는 수면 특성이 비교적 균질하고 경계가 명확해 안정적인 탐지가 가능했으나, 하천은 유속 변화, 탁수 유입, 협소한 수로 등으로 인해 경계가 불규칙해지며 탐지 성능의 변동성이 더 크게 나타났다.
또한 본 연구는 광학 기반 입력에 대한 분광 의존성, 단일 시점 위주의 학습 자료 구성, 시기·공간적 다양성이 제한된 데이터셋이라는 구조적 한계를 가진다. 이러한 제약은 탁수·그림자·협소 지류 등 분광 혼합이 발생하거나 경계가 불규칙한 환경에서 일반화 성능 저하로 이어질 수 있다. 이를 보완하기 위해 SAR 융합 기반의 탁수·음영 보정, 다중시기 영상 기반의 계절별·유역별 일반화 검증, 다양한 기후·지형 조건을 포함한 학습 자료 확충 등이 향후 연구에서 요구된다.
본 연구는 국토위성 자료를 활용한 수체 탐지 연구의 기초적 성과를 제시한 것으로, 향후 국내 수자원 관리 및 홍수·가뭄 재해 대응을 위한 위성 기반 모니터링 체계 고도화에 기여할 것으로 기대된다.
