

1. 서 론
한강홍수통제소는 1° (방위각) × 125 m (거리)의 공간해상도와 1분의 시간해상도로 강우레이더를 운영하고 있으며, 각 사이트 자료를 이용하여 레이더 합성 강우장(공간해상도 250 m × 250 m)을 생산하고 있다. 레이더 합성 강우장은 초단기 예측 강우 알고리즘의 입력자료로 활용되어 10분 간격으로 180분까지의 초단기 예측 강우 자료(공간해상도 500 m × 500 m)가 생산되고 있다. 한국건설기술연구원은 이러한 시공간해상도가 높은 초단기 예측 강우 자료를 활용하여 돌발홍수 예측 정보를 실시간으로 제공할 수 있는 돌발홍수 예측시스템을 개발하였다(Hwang et al., 2020). 돌발홍수 예측시스템은 3단계 돌발홍수 예측 정보(주의, 경계, 심각)를 읍면동 단위로 제공하고 있으며, 읍면동 단위의 상세한 예측 정보를 제공하고 있다는 점에서 그동안 홍수 감시 취약지역이었던 도시 및 산지·소하천에서의 돌발홍수 감시에 큰 역할을 할 것으로 기대되고 있다.
돌발홍수 예측시스템의 입력 자료로 활용되고 있는 레이더 강우는 그동안 정량적으로 과소하다는 문제점이 지적되어 왔고 레이더 강우를 정량적으로 보정하기 위한 여러 방법들이 연구되어 왔다(Kim et al., 2008; Yoo et al., 2013; Kim and Yoo, 2014; Yoon et al., 2016a). 이러한 수문 분야에서 적용되어 오던 정량적인 보정 방법은 레이더 원자료(편파변수)에서 변환된 레이더 강우 강도를 지상 우량계 자료와 정량적으로 유사하게 맞추는 것이었다. 그러나 최근의 연구에서는 레이더 편파변수에 내재되어 있는 오차를 제거하여 레이더 강우를 지상 우량계 수준으로 끌어 올리는 방법이 제시되었다(Yoon et al., 2016b; Yoon, 2018). 특히 Yoon et al. (2016b)의 연구에서 제시된 방법은 이중편파변수들의 오차를 제거할 수 있다는 점에서 현재 도입된 이중편파레이더의 정확도를 향상시킬 수 있는 방법이다.
레이더 강우의 정확도를 높이기 위해서는 현재로서 레이더 편파변수 오차 제거가 무엇보다 중요하다. 문제는 이러한 편파변수 오차가 강우 사상에 따라 다르고 레이더 사이트 별로도 다르다는 점이다. 특히 편파변수의 오차가 레이더 사이트 별로 다를 경우 레이더 합성 강우가 공간적으로 균질하지 못하다는 문제점이 발생할 수 있다. 한국건설기술연구원에서 제공하고 있는 돌발홍수 예측 정보는 실시간으로 제공되고 있다는 점에서 레이더 편파변수의 오차가 실시간으로 보정되지 못하는 경우 돌발홍수 예측 정보의 정확도는 떨어질 수밖에 없다.
본 연구에서는 레이더 강우의 정확도를 실시간으로 향상시키기 위해 레이더 편파변수 오차를 실시간으로 보정하는 프로그램을 개발하였다. 이를 위해 먼저 비슬산 레이더의 과거 363개의 강우사례에 편파변수 오차 보정에 따른 효과를 검증하였다. 그리고 실시간 보정 프로그램을 활용하여 레이더 편파변수의 오차를 실시간으로 보정하고 레이더 강우의 정확도를 실시간으로 향상시켰다.
2. 편파변수 보정에 따른 효과 검증
S밴드 이중편파레이더의 레이더 강우 강도는 반사도, 차등반사도, 차등위상차의 조합으로 추정된다. 단일편파레이더의 레이더 강우 강도는 반사도만을 이용하여 추정하였기에 반사도 오차만을 보정하면 레이더 강우의 정확도를 향상시킬 수 있었다(Yoon, 2018). 하지만 이중편파레이더는 반사도, 차등반사도, 차등위상차간의 관계를 고려하여 세 변수를 보정하여야 레이더 강우의 정확도를 향상시킬 수 있다. 본 연구에서는 변수 간의 관계를 고려하여 레이더 편파변수를 보정한 Yoon et al. (2016b)의 보정 기법을 이용하였다.
레이더 편파 변수 보정을 위해 적용된 레이더는 비슬산레이더로 비슬산레이더는 2009년에 도입된 S밴드 이중편파레이더이다. 비슬산레이더는 기상 관측을 위주로 하는 기상청 기상레이더와 달리 홍수예보를 위한 강우 관측이 주목적이기 때문에 강우레이더라 명하고 있다. Table 1은 비슬산레이더의 제원을 나타내며 Fig. 1은 비슬산레이더의 위치와 관측반경 150 km 이내에 존재하는 총 204개의 AWS를 나타낸다. 본 연구에서는 레이더 편파변수 오차 보정에 따른 효과를 장기간 검토하기 위해 2012년부터 2019년까지 총 363개 강우사례를 적용하였다(Table 2). Table 2에서 수집된 강우사례는 호우기인 5월에서 10월 사이에 비슬산레이더 영역에 포함된 대도시 지역(청주, 대구, 부산)에 일강우 5 mm 이상 발생한 날짜이다. 또한 레이더 강우 강도 추정 알고리즘은 Eq. (1)과 같은 J-POLE 알고리즘을 적용하였고 레이더 강우 정확도는 1-NE (Eq. (2))와 R/G (Eq. (3))를 통해 검증하였다.
Table 1.
Specifications of bislsan radar
| Manufacturer | METSTAR (China) |
| Beam width (°) | 0.95° |
| Transmitting frequency (MHz) | 2,795.0 |
| Peak power (kW) | 750 |
| Site altitude (m) | 1,085 |
| Observational range (km) | 150 |
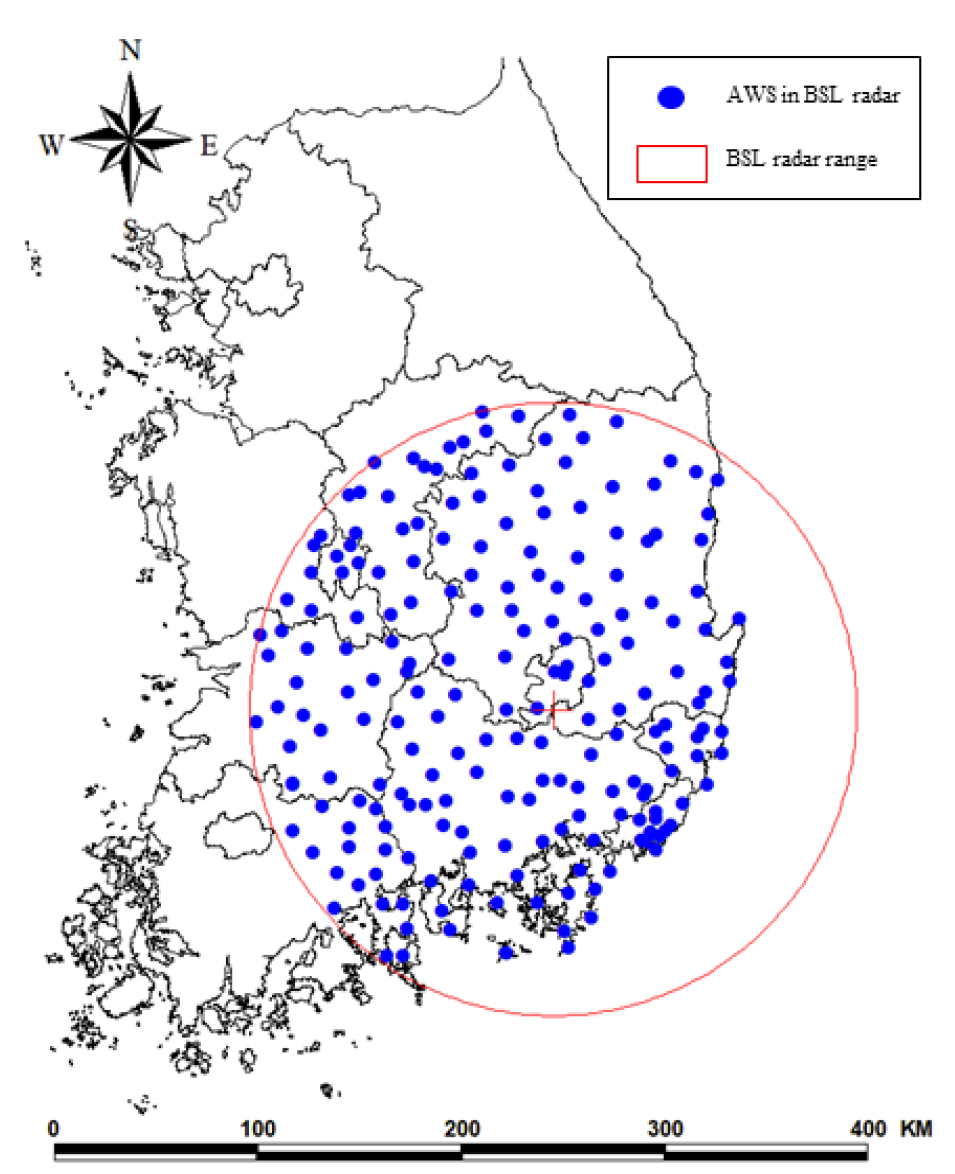
Table 2.
Events applied to validate to error correction program
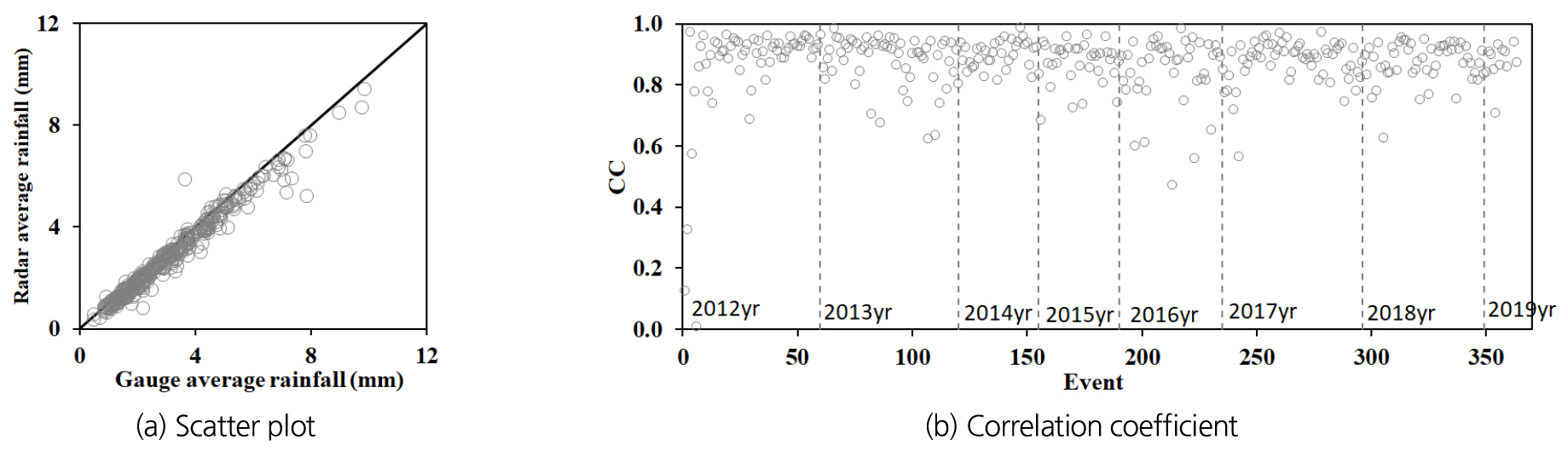
Fig. 2는 레이더 편파변수 오차 보정 전의 레이더 강우와 우량계 강우의 산점도와 상관관계를 나타낸다. Fig. 2(a)의 우량계 평균 강우는 레이더 반경 내에 위치한 모든 우량계 강우의 평균을 의미하고 레이더 평균 강우는 우량계와 공간적으로 동일한 위치의 레이더 격자 강우의 평균을 의미한다. 단일편파레이더의 레이더 강우가 우량계 강우에 비해 정량적으로 약 37% 정도의 수준이었던 Yoon (2018)의 연구에 비해 이중편파레이더의 레이더 강우는 정량적으로 약 67% 정도로 향상되었음을 확인할 수 있다. 그러나 이중편파레이더의 레이더 강우도 우량계 강우와 비교하여 여전히 편의가 나타나고 있음을 확인할 수 있다. 레이더 강우와 우량계 강우의 상관관계는 그림 Fig. 2(b)와 같이 대체로 상관계수 0.8 이상의 높은 상관도를 보이고 있으나 2015년도에는 상관도가 전 해에 비해 급격히 떨어짐을 확인할 수 있다.
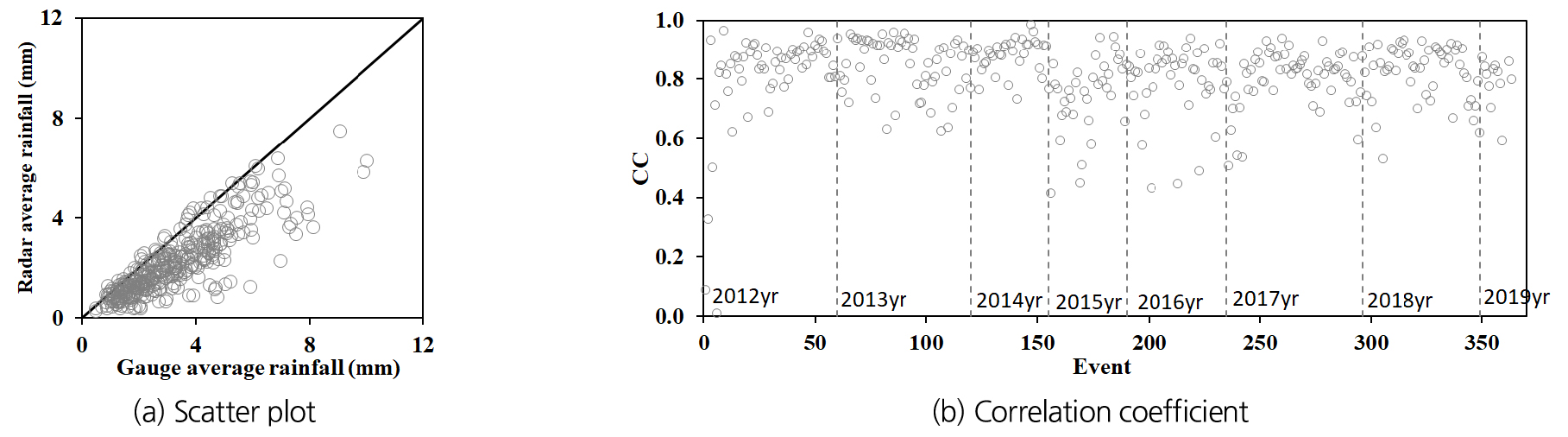
Fig. 3은 Yoon et al. (2016b)의 기법을 이용하여 산정된 레이더 편파변수의 오차를 나타낸다. 먼저, Fig. 3(a)와 같이 반사도 오차는 호우사례에 따라 변동하는 것으로 나타났으며, 평균적으로 2dBZ에서 4dBZ의 반사도 오차가 발생하였다. 차등반사도 오차(Fig. 3(b))는 대체로 -1.0dB에서 1.0dB 사이에서 나타났으며, 반사도 오차에 비해 변동이 더 크게 나타나고 있었다. 특히 2015년도에 차등반사도 오차가 급격히 떨어지는 것으로 나타났으며, 이러한 현상은 레이더 강우의 정확도(Figs. 2(b) and 4)에도 큰 영향을 미치는 것으로 나타났다. 레이더 편파변수 오차는 레이더 하드웨어 및 기상 조건에 따라 Fig. 3과 같이 변동하기 때문에 레이더 실무자들은 레이더 편파변수 오차에 대한 실시간 모니터링을 할 필요가 있다.
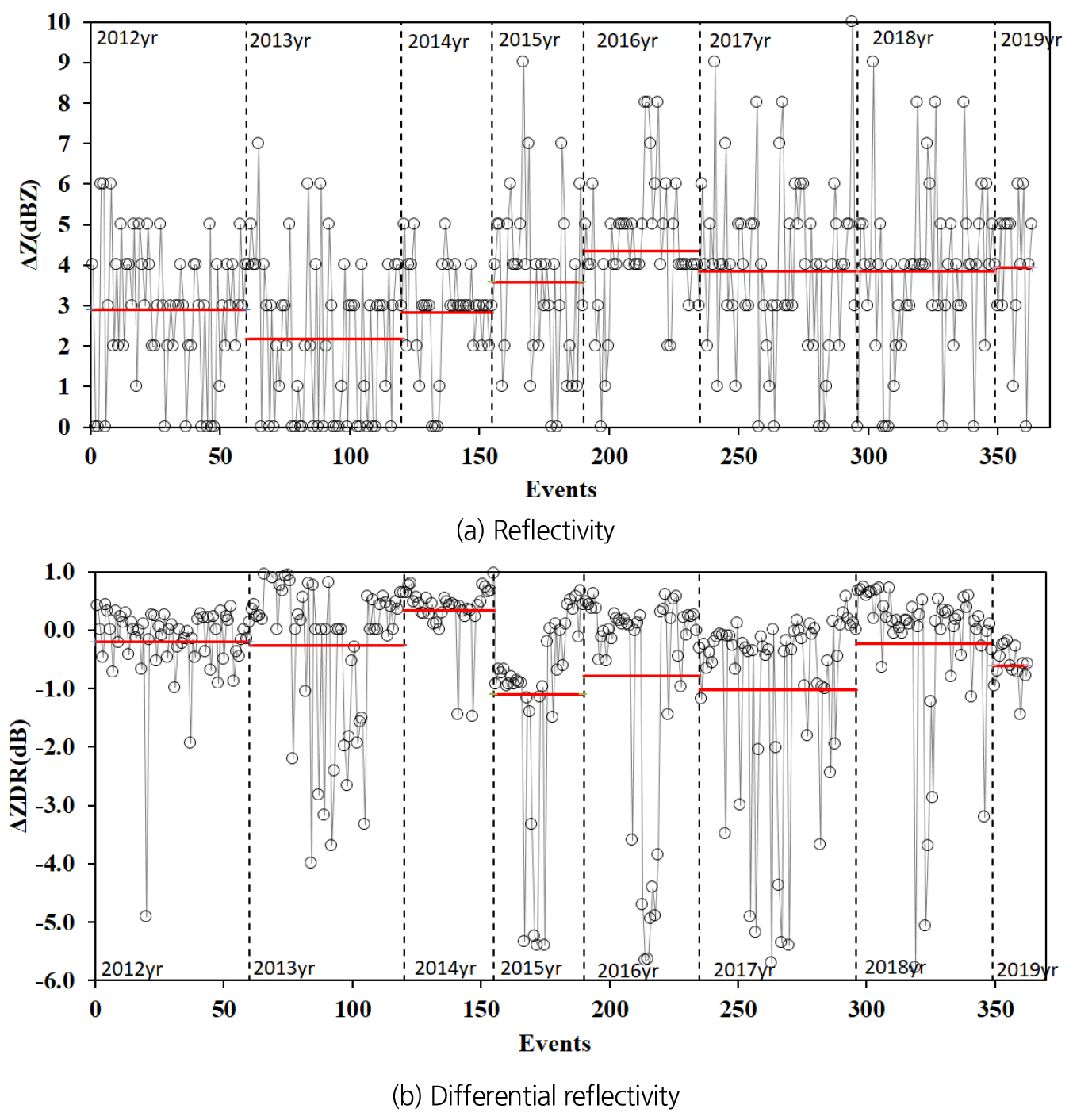
Fig. 4는 강우사례에 따른 레이더 강우의 정확도를 나타낸다. 그림에서 ‘o’ 기호는 편파변수 오차 보정 전 정확도를 나타내며 파란색 선은 보정 전 정확도의 이동평균을 나타낸다. ‘+’ 기호는 편파변수 오차 보정 후 정확도를 나타내며 붉은색 선은 보정 후 정확도의 이동평균을 나타낸다. 편파변수 오차 보정 전에는 레이더의 정량적 정확도를 나타내는 R/G 값은 20∼100% 수준으로, 오차의 변동성을 고려한 1-NE 값은 20∼70% 수준으로 나타나고 있다. 편파변수 오차 보정 전에도 강우 사례에 따라 정확도가 높게 나타나는 경우도 있으나 무엇보다 문제는 정확도의 변동성이 매우 크게 나타나고 있다는 점이다. 편파변수 오차 보정 이후에는 R/G 값이 약 90% 내외의 수준으로, 1-NE 값은 약 70% 내외의 수준으로 나타나고 있다. 편파변수 오차 보정 이후의 고무적인 점은 레이더 강우 정확도가 보정 전에 비해 안정적으로 나오고 있다는 것이다.
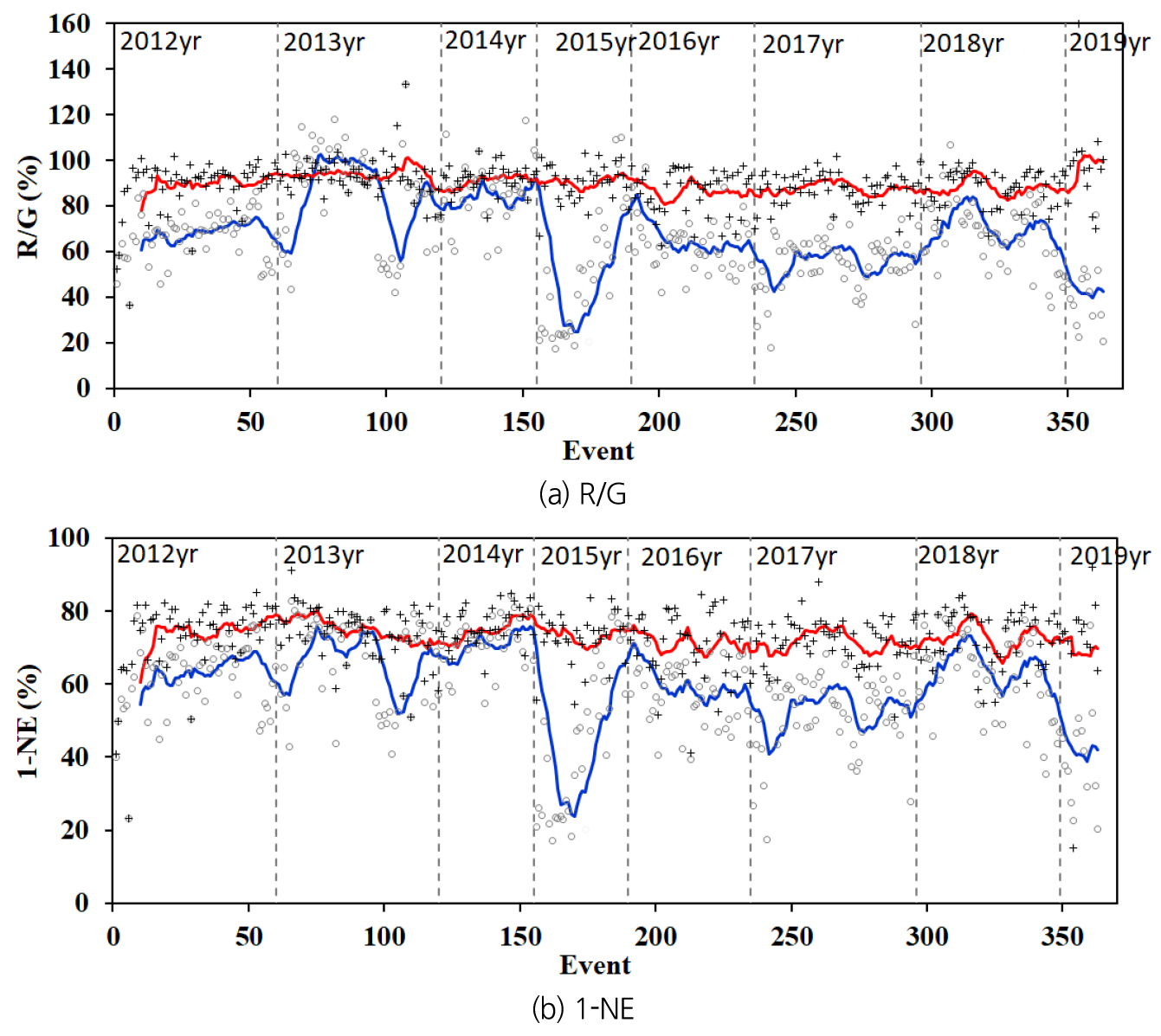
Fig. 5는 레이더 편파변수 보정 후의 레이더 강우와 우량계 강우의 산점도와 상관관계를 나타낸다. Fig. 5(a)에서와 같이 레이더 강우는 편파변수 보정 후 우량계 강우와 거의 유사하게 나타나고 있음을 확인 할 수 있다. 또한 상관관계는 대체로 상관계수 0.8 이상의 높은 상관도를 안정적으로 나타내고 있다. 이상과 같이 레이더 편파변수 보정 후 레이더 강우의 정확도가 향상됨을 확인 할 수 있다. 특히, 편파변수 보정 전에는 정확도의 변동 폭이 매우 크게 나타나고 있었으나 보정 후 정확도가 안정적으로 나타나고 있었다. 이러한 결과를 통해 레이더 강우의 정확도를 안정적으로 확보하기 위해서는 레이더 편파변수에 대한 조절이 필요함을 확인할 수 있다.
3. 실시간 레이더 편파변수 오차 보정 프로그램 개발
레이더 편파변수의 오차를 제거한 이후 레이더 강우의 정확도 수준이 정량적으로 약 90% 수준까지 향상됨을 확인하였다. 그러나 2절에서 장기간으로 수행된 편파변수 오차 보정은 사후에 일 단위로 분석된 결과이다. 1분에서 5분 간격으로 자료가 생산되고 있는 레이더를 실시간으로 홍수 및 악기상 관측에 활용하기 위해서는 실시간으로 정확도 높은 레이더 자료가 생산되어야 한다. 이를 위해서는 레이더 편파변수의 오차 보정도 실시간으로 수행되어야 한다. 이에 한국건설기술연구원에서는 레이더 편파변수 오차를 실시간으로 보정하여 레이더 강우의 정확도를 실시간으로 개선하는 프로그램을 개발하였다. 본 프로그램은 레이더 편파변수의 오차 보정을 목적으로 하여 프로그램 명을 “DPV_BIAS (Bias of Dual Polarization Variables)”로 명하였다.
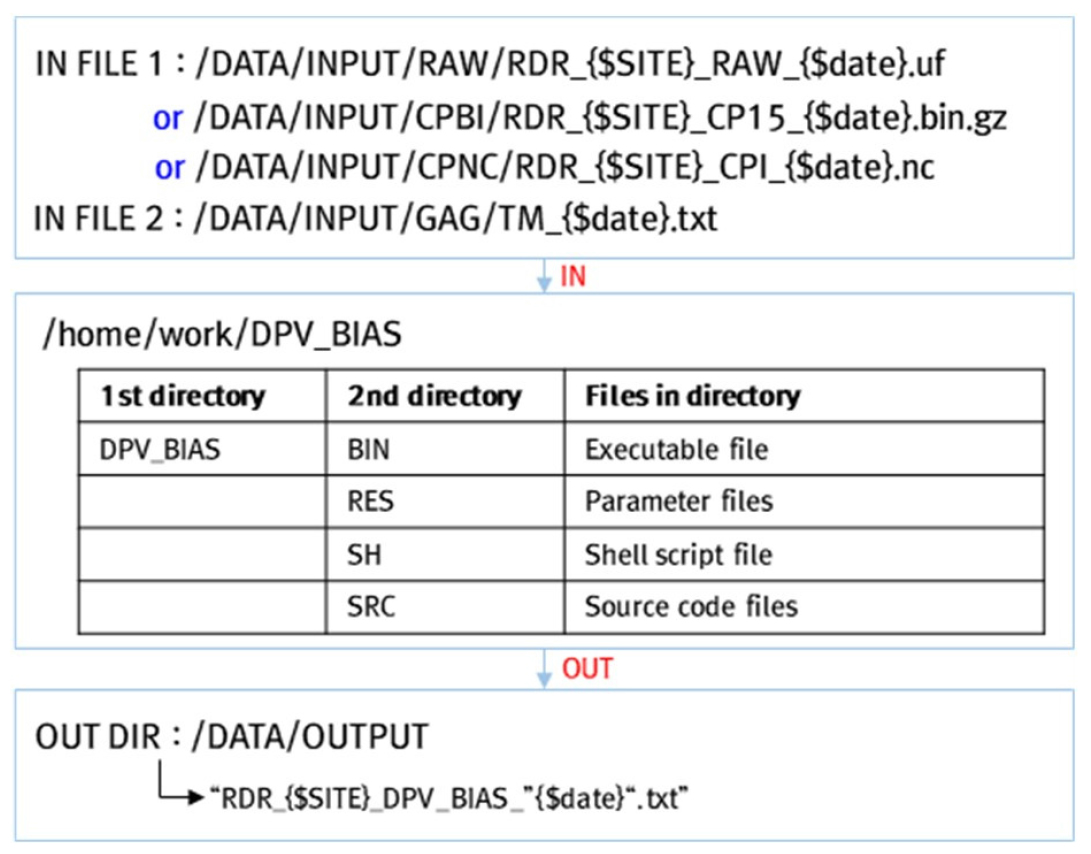
프로그램의 입출력 자료 및 디렉토리 구조는 Fig. 6과 같다. 먼저 프로그램의 입력자료는 레이더 편파변수 자료와 우량계 자료이다. 본 프로그램은 레이더 편파변수 입력자료를 레이더 볼륨 자료(UF), 이진 자료(Binary), 넷시디에프(NetCDF) 중 선택적으로 입력하도록 하였다. UF 형태의 레이더 볼륨 자료는 레이더로부터 생산되는 초기 자료이기에 편파변수 최적화를 중간 산출물 없이 수행할 수 있는 장점이 있다. 그러나 볼륨 자료는 모든 레이더 스캔 자료와 편파변수 자료가 포함되어 있어 파일 크기가 커 계산상의 속도가 느리다는 단점이 있다. 반면 이진 자료 및 넷시디에프 자료는 레이더 볼륨 자료에서 원하는 편파변수를 2차원 평면 자료로 추출한 자료이기에 파일 크기가 작고 계산상의 속도가 빠르다는 장점이 있다. 하지만 레이더 볼륨 자료에서 또 다른 출력 자료를 만들어야 하는 과정을 거쳐야 한다는 단점이 있다. 출력자료는 레이더 강우의 오차를 최소화하기 위한 편파변수의 오차 값이다. 본 프로그램의 디렉토리 구조는 실행 프로그램이 위치해 있는 “/BIN”, 입력 및 출력과 관련된 정보가 위치해 있는 “/RES”, 쉘스크립트가 위치해 있는 “/SH”, 소스프로그램이 위치해 있는 “/SRC”로 구성되어 있다.
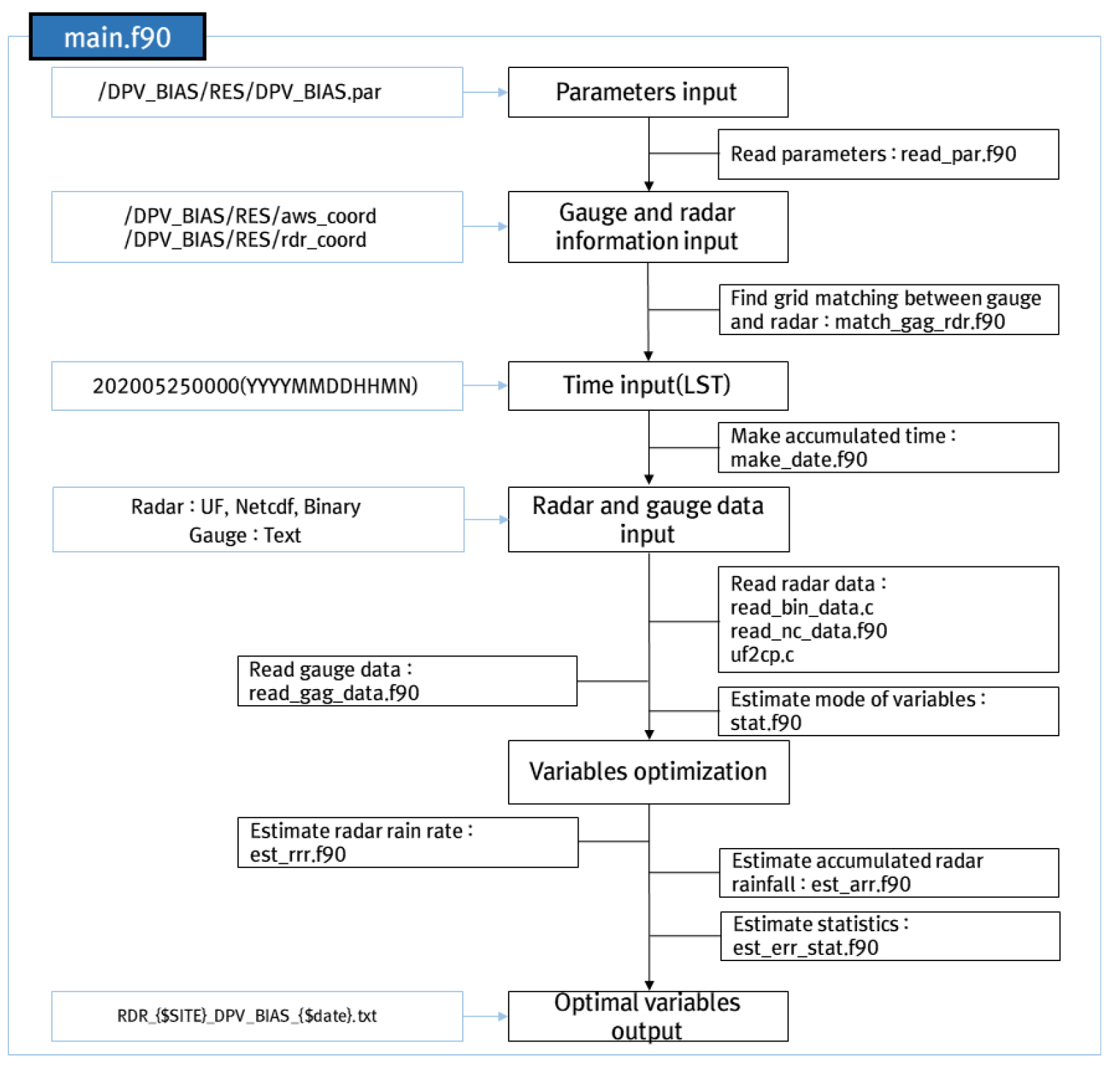
레이더 편파변수 실시간 보정 프로그램에서의 소스프로그램은 “/SRC”에 저장되어 있다. 본 소스프로그램의 구조는 Fig. 7과 같다. 먼저 “read_par.f90” 소스프로그램에서는 쉘스크립트로부터 입력 받은 파라미터 파일(“DPV_BIAS.par”)을 읽어 본 프로그램에 구동되는 데 필요한 각종 파라미터들을 입력한다. 다음으로 “match_gag_rdr.f90” 소스프로그램에서는 우량계 좌표와 공간적으로 일치되는 레이더 격자의 번호를 찾는다. “make_date.f90” 에서는 파라미터 파일에서 입력된 누적 시간을 반영하여 현재 입력된 시간을 기점으로부터 과거 누적 시간 전까지의 시간을 1분 단위로 계산한다. “read_bin_data.c”는 입력된 레이더 자료가 이진 자료인 경우, “read _nc_data.f90”은 입력된 레이더 자료가 넷시디에프인 경우, “uf2cp.c”는 입력된 레이더 자료가 볼륨 자료인 경우 각각 레이더 자료를 읽는 소스프로그램이다. “read_gag_data.f90”은 레이더 자료와 비교될 우량계 자료를 읽는 소스프로그램이다. “stat.f90”소스프로그램은 입력된 레이더 편파변수들의 관계로부터 편파변수의 최빈값을 산정한다. “est_rrr.f90”에서는 우량계와 공간적으로 일치되는 레이더 강우 강도를 산정한다. “est_arr.f90”에서는 앞서 산정된 레이더 강우 강도를 레이더 강우량으로 변환하고 “est_err_stat.f90”은 레이더 강우량과 우량계 강우량을 비교하여 오차를 산정한다.
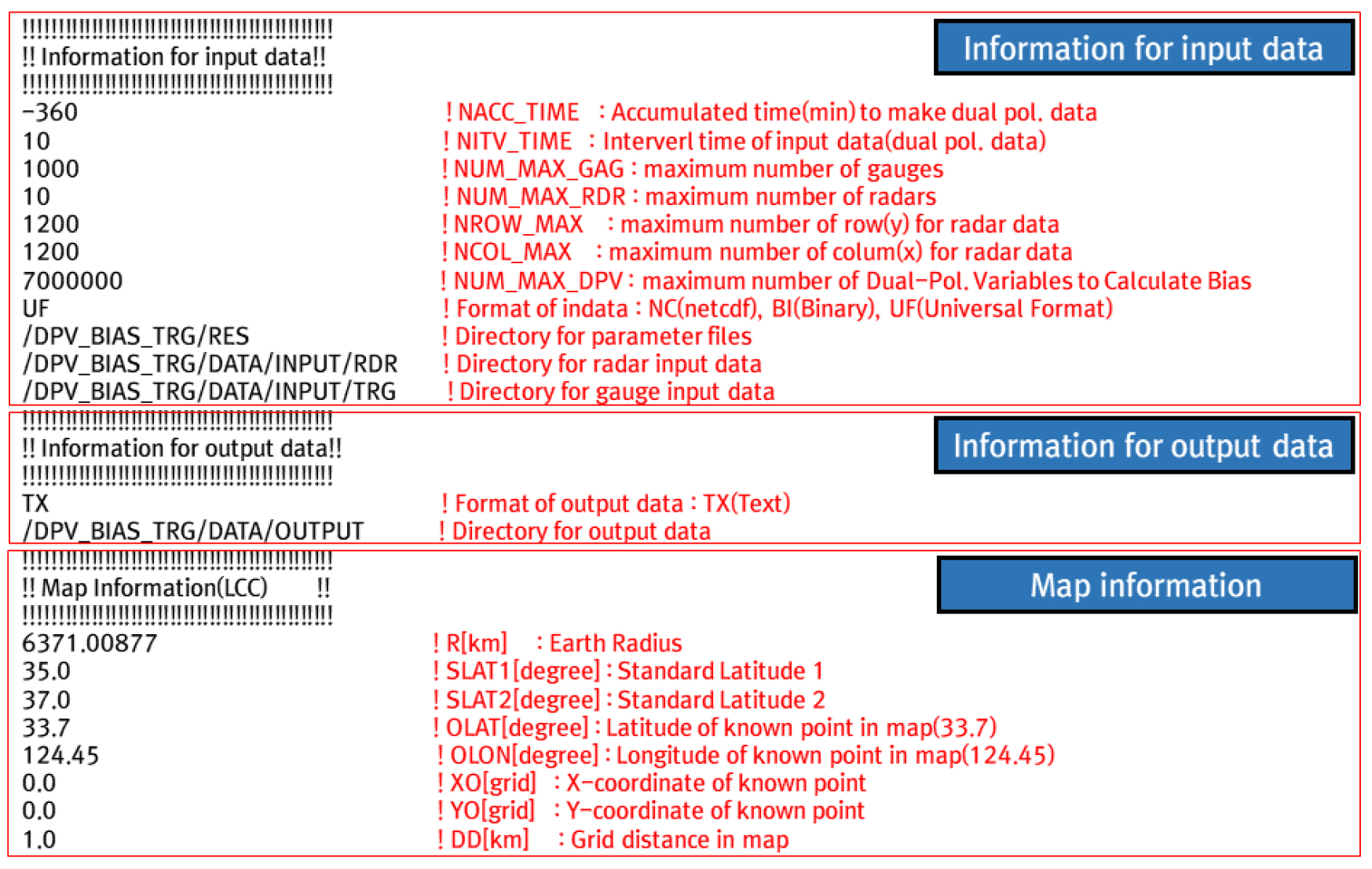
“/RES” 디렉토리 내에 있는 “DPV_BIAS.par”은 레이더 편파변수 실시간 보정 프로그램의 입력 및 출력변수 정보가 저장되어 있는 파라미터 파일이다. 본 파일은 Fig. 8과 같이 입력자료, 출력자료, 지도 및 공간영역 정보로 나뉘어 진다. 먼저 입력자료 정보에는 현 시점으로부터 누적될 과거 시간(NACC_TIME), 누적될 자료의 시간 간격(NITV_TIME), 우량계 개수의 최대 수(NUM_MAX_GAG), 레이더 사이트의 최대 수(NUM_MAX_RDR), 레이더 자료의 최대 열(NROW_MAX)과 행(NCOL_MAX)의 개수, 편파변수 편의 계산에 이용될 편파변수의 최대 수(NUM_MAX_DPV), 레이더 입력 자료 형태(NC, BI, UF), 레이더 및 우량계 자료 입력 경로가 포함되어 있다. 출력자료 정보에는 출력 자료의 형태 TX (Text)와 출력 자료 경로가 포함되어 있다. 다음은 지도 및 공간영역 정보로 투영좌표체계에서 필요한 정보들(지구반경, 표준위도, 지도 기준점의 위경도, 기준점 X·Y 좌표, 격자간 거리)이 포함되어 있다.
“/SH” 디렉토리 내에 위치한 스크립트(“DPV_BIAS.sh”)는 프로그램 실행에 필요한 각종 입력 변수를 생성하고“/BIN”에 위치해 있는 실행프로그램을 실시간으로 구동한다(Fig. 9). 스크립트에서는 본 프로그램의 주요 경로, 라이브러리 경로, 실행파일 경로, 입출력 변수 파일 정보 등을 입력하여 프로그램을 실행하게 된다.
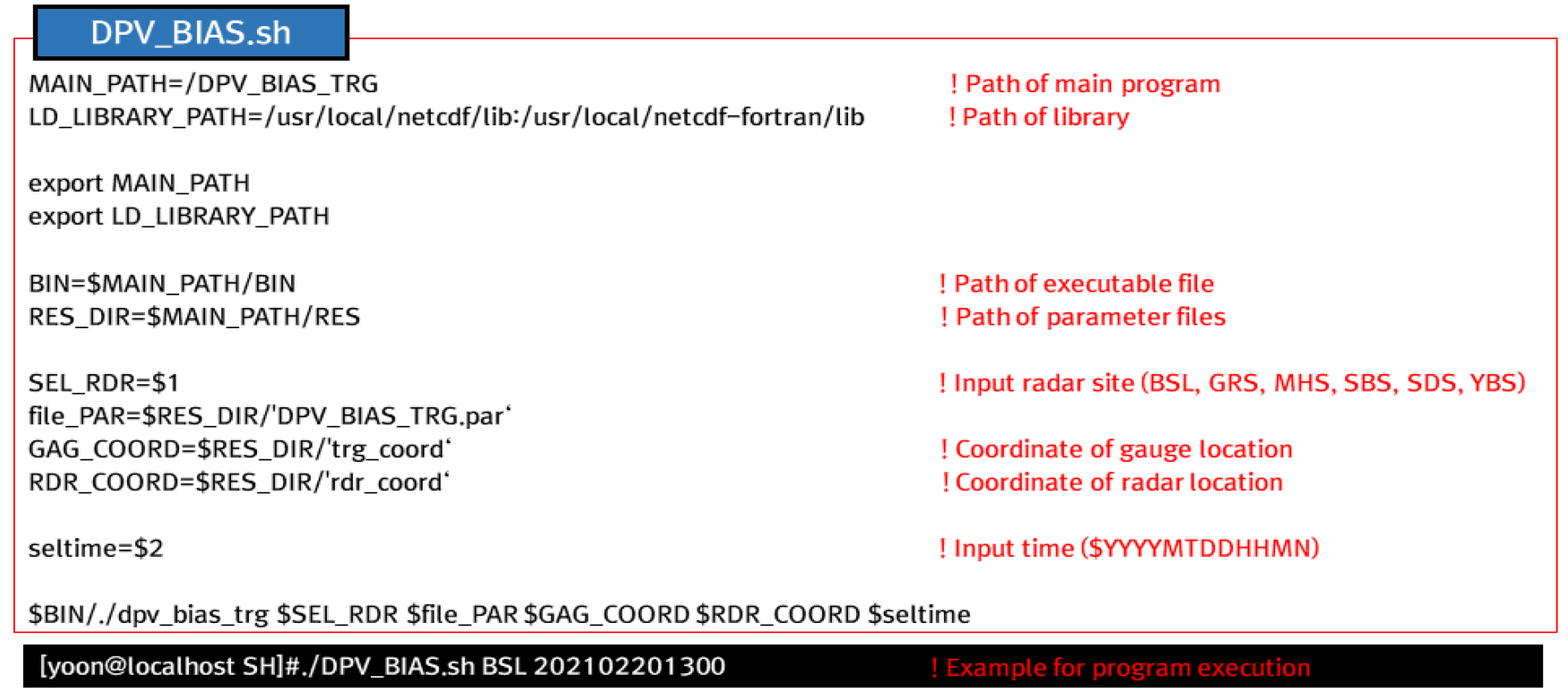
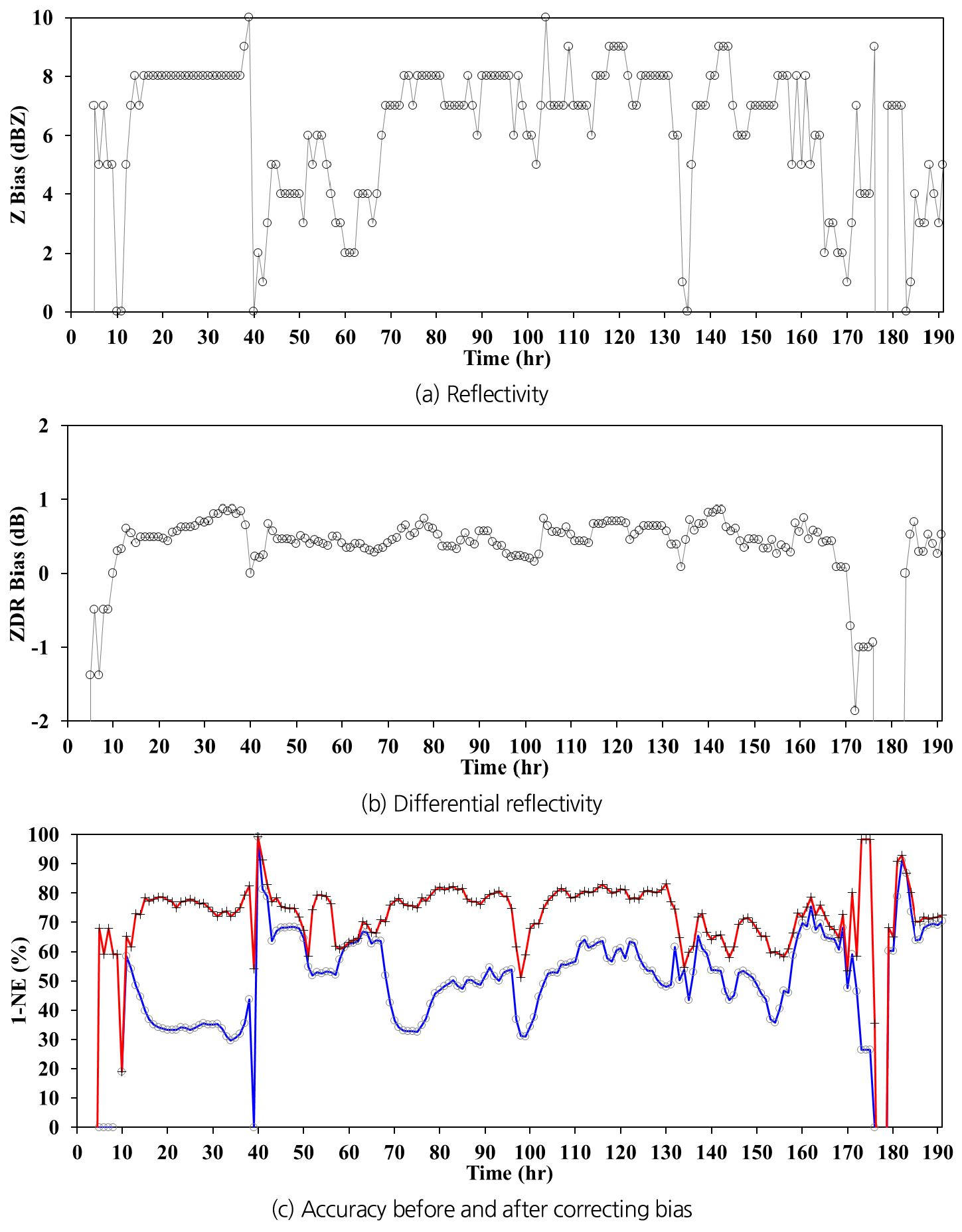
Fig. 10은 레이더 편파변수 실시간 보정 프로그램을 이용하여 2021년 7월 3일부터 10일까지 실행한 결과이다. 편파변수의 편의는 1시간 마다 6시간 누적된 자료를 이용하여 산정하였다. 그림에서와 같이 반사도의 편의는 대략 4dBZ와 8dBZ 사이에서 변동하는 것으로 나타났으며, 차등반사도의 편의는 0dB와 1dB 사이에서 변동하는 것으로 나타났다. 이러한 편파변수의 편의를 보정하기 전의 정확도(1-NE)는 Fig. 10(c)의 파란색 선과 같으며 대체로 50% 이하의 수준으로 나타났다. 편파변수 보정 이후의 정확도는 Fig. 10(c)의 붉은색 선으로 대체로 70% 내외의 수준으로 나타났다. 물론 편파변수의 보정 전과 후에 정확도의 차이가 거의 없는 사례도 있었지만, 대체로 보정 후 정확도가 향상되고 있음을 확인할 수 있다. 또한 보정 이후에도 정확도가 매우 낮은 경우는 강우가 작거나 거의 없는 사례에 해당한다.
4. 결 론
본 연구에서는 레이더 강우의 정확도를 향상시키기 위해 레이더 편파변수 오차를 실시간으로 보정하는 프로그램을 개발하였다. 이를 위해 먼저 비슬산 레이더의 과거 363개의 강우사례에 편파변수 오차 보정에 따른 효과를 검증하였다. 검증 결과 편파변수의 오차 보정 이후 레이더의 정량적 정확도 수준을 나타내는 R/G 값은 약 90% 내외의 수준으로, 1-NE 값은 약 70% 내외의 수준으로 나타났다. 상관관계는 대체로 상관계수 0.8 이상의 높은 상관도를 안정적으로 나타나고 있었다. 이상과 같이 레이더 편파변수 오차 보정 이후 레이더 강우의 정확도가 향상됨을 확인 할 수 있었다. 특히, 편파변수 보정 전에는 정확도의 변동 폭이 매우 크게 나타나고 있었으나 보정 후 정확도가 안정적으로 나타나고 있었다. 이러한 결과를 통해 레이더 강우의 정확도를 안정적으로 확보하기 위해서는 레이더 편파변수에 대한 조절이 필요함을 확인할 수 있다.
그러나 363개의 강우사례에 대해 수행된 편파변수 오차 보정은 사후에 일일 단위로 분석된 결과이다. 시간 해상도가 높은 레이더 자료를 실시간으로 홍수 및 악기상 관측에 활용하기 위해서는 실시간으로 정확도 높은 레이더 자료가 제공되어야 한다. 이는 레이더 편파변수의 오차 보정도 실시간으로 수행되어야 함을 의미한다. 또한 레이더 편파변수 오차는 레이더 하드웨어 및 기상 조건에 따라 변동하기 때문에 레이더 편파변수 오차에 대한 실시간 모니터링이 레이더 실무자들에게 필요하다. 이에 한국건설기술연구원에서는 레이더 편파변수 오차를 실시간으로 보정하여 레이더 강우의 정확도를 실시간으로 개선하는 프로그램(DPV_BIAS)을 개발하였다.
DPV_BIAS 프로그램은 기본적으로 실행 프로그램이 위치해 있는 “/BIN”, 입력 및 출력과 관련된 정보가 위치해 있는 “/RES”, 쉘스크립트가 위치해 있는 “/SH”, 소스프로그램이 위치해 있는 “/SRC”로 구성되어 있으며, 실행 간격(1분 or 1시간)을 조절하여 실시간으로 프로그램을 실행할 수 있도록 개발하였다. 본 프로그램을 수행한 결과 레이더 강우의 정확도(1-NE)를 약 70% 내외의 수준까지 향상시킬 수 있었다. 이러한 정확도 수준은 비실시간으로 수행된 결과(363개의 강우사례)와 거의 유사한 수준으로 레이더 편파변수의 오차가 본 프로그램을 통해 실시간으로 보정 가능하다는 것을 의미한다.
