

1. 서 론
2. 이론적 배경
2.1 이중편파 레이더
2.2 Convolutional Autoencoder
3. 모델 구축
3.1 대상 유역
3.2 데이터 전처리
4. 결과 및 분석
5. 결 론
1. 서 론
2020년 6월부터 한반도에 이례적인 강우로 인해 전국적으로 많은 피해가 발생하여 생명과 재산에 큰 피해를 초래하였다. 초기 강우패턴은 지역적으로 높은 강우강도의 국지성 집중호우로 시작되었으며 장마전선, 3개의 태풍으로 인해 강우패턴이 매우 불규칙하고 최장기간인 51일을 경신하여 54일을 기록하였다.
Yang (2012)에 따르면 최근 기후변화로 집중호우의 발생빈도가 증가하고 있으며 시간당 30 mm 이상 집중호우의 빈도가 1980년대 평균 60회에서 2000년대 82회, 2011년에는 133회로 발생빈도가 가파르게 증가하고 있다. 이에 따라 수재해 방지 및 수자원 관리를 위하여 수문해석 모형을 이용한 유출해석결과를 바탕으로 관련 정책 및 대응방안을 마련하고 있으며, 이를 위한 신뢰도 있는 강우자료의 적용은 매우 중요하다. 그러나 지점 강우의 공간적 내삽기법을 활용하였을 때, 밀도가 조밀하지 못할 경우에 우량계 사이의 강우 분포 및 강우량을 정확히 파악하는데 한계가 존재한다(Kim et al., 2010). 또한 지상우량 관측망으로부터 공간분석으로 얻어지는 면적강우량은 지형·강우유형과 관련된 강우의 복잡한 공간특성으로 인해 지형이 복잡해지고 대류형 강우가 빈발하는 환경에서는 그 신뢰성이 떨어진다(Lee, 2012). 이와 같은 문제점을 해결하고자 기상청과 환경부는 레이더를 도입하여 고해상도의 강우관측을 실시하였으며 현재 환경부에서는 홍수방지와 수자원 관리 등을 위하여 총 9개의 강우레이더를 운영중에 있다.
현재 사용중인 강우레이더는 S밴드 이중편파 레이더이며 이는 단일편파 레이더보다 강수형태의 구분이 쉽고 강수량 추정의 정확도가 높다. 하지만 강우 레이더는 격자형태의 강우값 제공으로 지점 강우보다 많은 활용가능성이 존재하지만 관측되는 반사도를 강우강도로 변환하는 방식으로서 강우량 추정 오차의 원인이 다양하므로 실질적인 활용을 위하여 지점 강우와의 보정이 필요하다. 이 기법들은 주로 반사도의 관측오차를 줄임으로써 강우추정의 정확도를 높이는 데 중점을 두고 있으며 현업에서 사용중인 이중편파레이더 강우의 편의보정을 위해 여러 기법들이 선행 연구를 통해 제안된 바 있다. 가장 널리 사용되는 방법은 강우추정의 정확도를 높이기 위해 반사도의 관측오차를 줄이는 방법으로써 레이더 변수 관측 자료의 자기일관성(self-consistency)을 이용하여 관측 부피와 높이의 차이에서 발생할 수 있는 오차를 줄이는 방법이다(Ryzhkov et al., 2005; Kwon et al., 2015, Na and Yoo, 2020). 또한 레이더 강우 보정에 관한 선행연구로 Noh et al. (2012)은 레이더 강우자료의 신뢰성 확보를 위해 지상강우자료를 활용한 MFB (Mean-Field Bias)보정기법과 SOA (Statistical Objective Analysis)보정기법을 사용하였으며, 이중 SOA방법을 통해 보정된 격자형 레이더 강우자료가 유출모형의 입력자료로서 수문학적 활용성이 더욱 높은 것으로 나타냈다. 그리고 Kim et al. (2014)은 레이더 추정 강우의 조정을 위하여 지구통계적 방법을 이용한 레이더 강우의 실제 오차에 대한 유효반경을 결정하여 국지 우량계 보정 방법인 LGC (Local Gauge Correction)를 적용하였으며 여름철 집중호우 4가지 사례에 긍정적인 개선효과를 도출하였다. You et al. (2016)은 단일 편파 레이더 반사도의 편의를 보정하기 위하여 이중 편파 레이더의 반사도와 PARSIVEL 데이터를 이용한 3가지 방법을 제시하여 3가지 방법 모두 강우 추정치가 개선됨을 확인하였으며, 그 중 중첩(overlapping) 방법과 Disdrometer 방법을 결합하여 사용한 결과가 강우를 보다 정확하게 추정하는 것으로 나타내었다. 또한 Kim et al. (2017)은 레이더 강우자료와 지상에 내리는 강우의 오차구조를 규명하고자 극치 호우사상을 시단위로 구축하고, 분위회귀 분석기법을 이용하여 계통적 오차를 제거하였으며 편의보정을 실시하였다. 그리고 연구결과를 통해 50 ~ 60%의 조건부 분위값을 선택하는 경우 효과적으로 레이더 강우자료의 과소추정 문제를 보정할 수 있으며 통계적 특성을 재현할 수 있음을 보여주었다.
Chumchean et al. (2006)은 레이더 강우의 실시간 보정에 있어 칼만필터를 사용한 뒤 보정된 레이더 강우의 정확성을 평가하였다. 이후 Na and Yoo (2020)은 비슬산 이중편파 레이더 관측자료를 대상으로 듀얼칼만필터를 사용한 편의 보정을 수행하였으며 기존 칼만필터보다 우수한 예측성능을 가짐을 확인하였다. 그리고 예측된 G/R비를 이용한 편의보정을 통한 이중편파 레이더 강우강도의 편의가 개선됨을 확인하고 그 적합성을 검토하였다.
레이더 강우 보정에 있어서 인공신경망를 활용한 선행연구로는 Kim et al. (2010)은 지상 우량계와 레이더 강우를 인공신경망을 통하여 지상우량계가 가지는 지점 강우의 정확성과 강우레이더가 가지는 공간성의 장점을 최대화할 수 있도록 보정하고자 하였다. 그리고 Le et al. (2020)은 메콩강 전 유역을 대상으로 위성 강우의 편의보정 평가를 위하여 Convolutional Autoencoder (CAE)를 활용하였다. 해당 연구에서는 국제협력프로그램에서 생산한 격자형 강수인 APHRODITE를 관측값으로 활용 및 메콩강위원회(MRC)에서 사용하는 통계적 편의보정 방법과 CAE 모델을 활용한 편의보정 방법을 비교하였을 때, 통계적 방법보다 강우의 정량적인 추정뿐만 아니라 격자형태의 공간적 분포까지 보정되어 CAE 모델의 뛰어난 성능을 검증하였다.
따라서 전술한 연구를 바탕으로 본 연구에서는 이미지 처리에 우수한 성능을 보이는 CNN (Convolution Neural Network)기반 CAE를 이용하여 레이더 합성 강우의 편의 보정 능력을 평가하고자 한다. 레이더 합성 강우의 편의보정을 위해 사용된 레이더 및 지점강우 자료의 기간은 2017년 7월 16일 미호천 유역에서 홍수 경보가 발생했던 사상으로 환경부에서 제공된 13시간의 레이더 합성 강우 및 레이더 합성 강우와 비교하기 위한 공간보간된 지점강우를 사용하였다. 각 자료의 공간해상도는 250 m, 시간해상도는 10분 단위로 총 790분의 자료를 같은 시·공간적 해상도로 구축하여 CAE 모델의 기초자료로 활용하였다.
2. 이론적 배경
2.1 이중편파 레이더
기상레이더의 강우 관측 원리는 대기 중 강수입자에 대한 레이더 반사도와 강우강도의 Z-R 관계식으로 강우를 추정하기 때문에, 강우 추정에 불확실성이 존재하며 이를 개선하기 위해 레이더의 종류 또한 발전해왔다.
현업에서 사용 중인 이중편파레이더는 수평편파만을 사용하는 단일편파레이더와 달리 수직·수평파를 송신하여 대기 중에 존재하는 대기수상체에 부딪혀 산란(scattering) 되어 돌아오는 신호를 수신하며, 반사도(Z), 차등반사도(ZDR), 비차등위상차(KDP), 교차상관계수(phv) 등 다양한 이중편파변수를 제공하여 보다 정확한 강수 정보를 얻을 수 있다. 시·공간적으로 높은 분해능의 레이더를 이용한 강수량 추정은 돌발홍수, 폭우 등 위험기상을 감시 및 예측하는데 매우 유용하며, 반사도 외의 다양한 이중편파변수를 제공하는 이중편파레이더의 경우 대기수상체 분류 및 미세물리과정의 변화에 의한 우적크기분포(Drop Size Distribution, DSD) 변동을 설명할 수 있어 이에 따른 강우 추정 오차를 줄일 수 있다(Ryzhkov et al., 2005; Kim et al., 2014).
환경부에서는 임진강 강우레이더를 시작으로 19년 완공된 예봉산 강우레이더까지 총 9개(대형 7개, 소형2개)의 레이더관측소를 구축 및 운영 중에 있으며 2021년에는 감악산 레이더관측소가 완공될 계획이다.
2.2 Convolutional Autoencoder
Convolutional Autoencoder (CAE)은 합성곱신경망(CNN)과 오토인코더(Autoencoder, AE)가 합성된 알고리즘이며 본 연구에 사용된 모델구조의 예시는 Fig. 1과 같다.
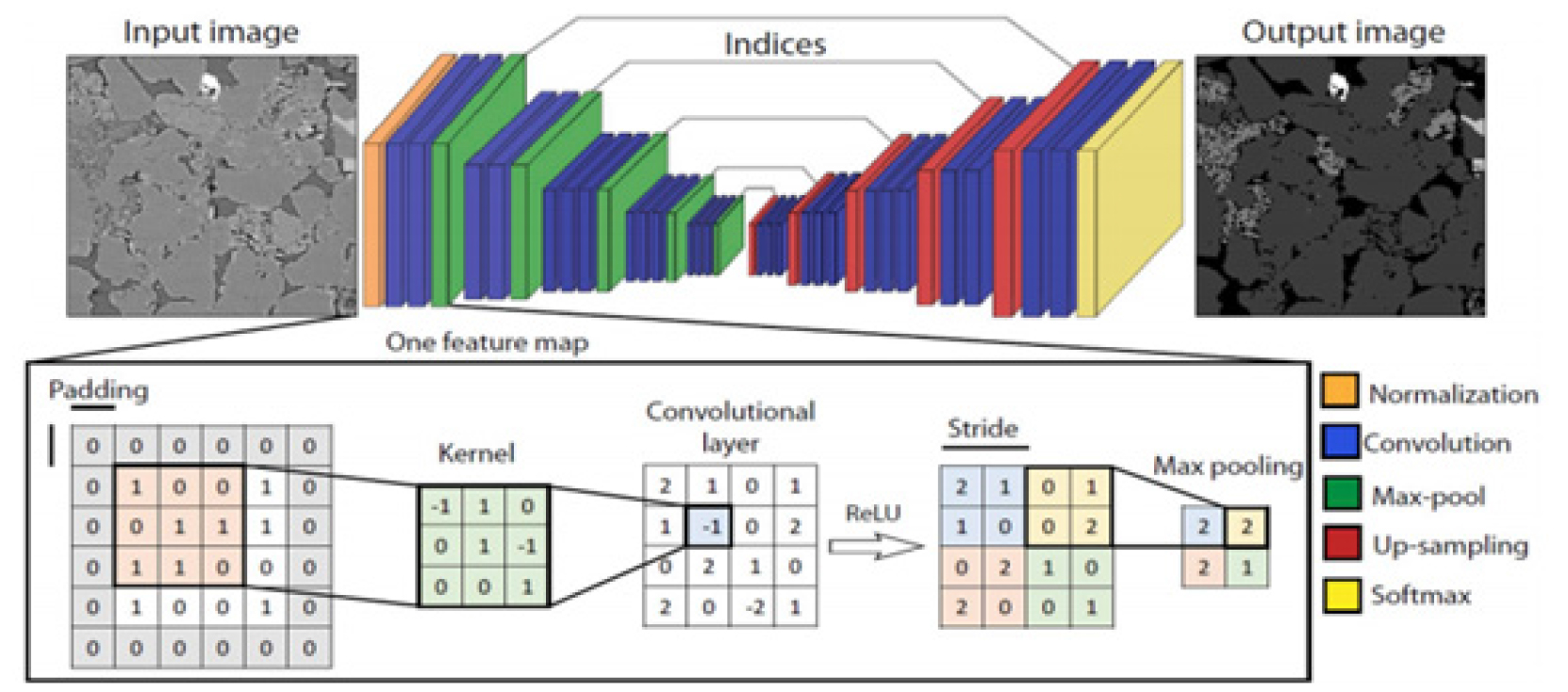
먼저, 이미지 처리에 두각을 나타내는 CNN은 합성곱층(Convolution layer)과 풀링층(Pooling layer)으로 구성되어 있으며 3차원 행렬을 입력자료로 받아 학습을 수행하기 때문에 공간·구조적 정보를 기억할 수 있다. 또한 AE는 인코딩(Encoding) 과정과 디코딩(Decoding) 과정으로 구성되어 있으며 입력자료를 압축하는 과정에서 입력데이터의 특성(feature)을 추출하고 그 특성을 이용하여 고차원으로 재구성하며 학습이 진행된다. 따라서 모델의 출력이 입력 자료에 최대한 근사하는 방향으로 재구성 손실(reconstruction error)을 최소화 시킴으로써 입력 자료의 핵심적인 특징(feature)을 학습하도록 한다(Park and Ko, 2020). 두 가지 알고리즘을 응용한 CAE 알고리즘은 AE 알고리즘의 layer를 Convolution layer로 사용하여 2차원 다채널 입력 자료의 특징을 추출하여 재구성할 수 있도록 하였으며, 가중치가 입력의 모든 위치 간에 공유되며 공간적 인접성을 보존하기 때문에 기존의 AE 알고리즘과의 차별성을 가진다(Masci et al., 2011). CAE 알고리즘 연산과정의 기본적인 구조는 Eqs. (1) and (2)와 같다.
여기서 Eq. (1)은 2차원 단일 채널 입력값인 의 경우 번째 특성맵(feature map)의 잠재적 계산과정이며, 는 2차원의 합성곱 연산을 나타내고, 는 연산을 위한 활성화 함수, 는 인코딩과정의 파라미터이다. Eq. (2)에서 는 재구성된 디코딩의 출력값이며 H는 전체 특성맵, 는 디코딩과정의 파라미터이다.
본 연구에서의 CAE 활용 목적은 레이더 강우자료와 지상강우자료의 편의를 보정하기 위함이며, CAE를 거친 재구성된 레이더 강우자료는 격자형의 지상강우와의 오차를 계산하고 이를 최소화하는 최적화 학습이 이루어진다. 학습 과정에서 최적화 기법은 경사하강법(Gradient Descent Algorithm), Momentum, RMSprop (Root Mean Square propatation), Adam (Adaptive Moment Estimation) 등이 있으며, 본 연구에서는 최적화 기법 중 RMSprop과 Momentum의 장점을 살려 개발된 Adam 기법을 선택하여 적용하였다.
3. 모델 구축
3.1 대상 유역
본 연구에서는 환경부 레이더 합성 강우의 편의보정을 위해 CAE 모델을 이용하여 평가하고자 2017년 7월 16일 홍수경보가 발생했던 미호천 유역을 대상유역으로 선정하였다. 미호천 유역은 금강수계의 주요 지류이며 유역면적은 1,805 km2, 유로연장은 87.3 km이다. Fig. 2은 대상유역의 위치 및 지점에서의 편의보정 결과비교를 위하여 선정된 환경부의 강우 관측소 위치를 보여주고 있으며 Table 1은 각 관측소의 정보와 해당 사상에서의 13시간 누적강우량를 나타내고 있다.
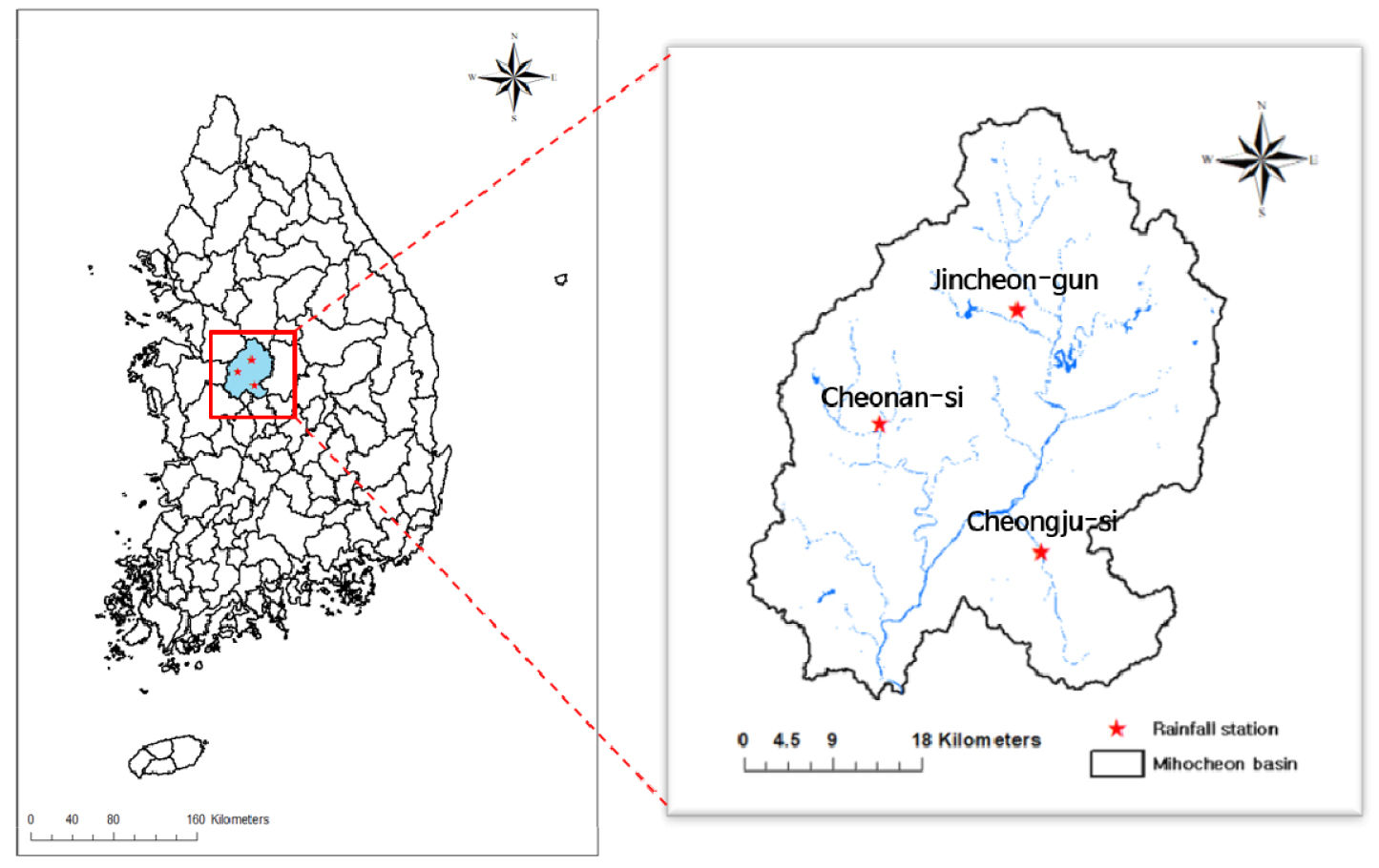
Table 1.
Information of rainfall station in Miho basin
해당 강우 사상에서 미호천 유역 내 청주시(흥덕교) 관측소의 10분 최대강우량은 21 mm, 13시간 누적강우량은 300 mm이며, 같은 격자에서 레이더 합성 강우의 누적강우량은 272.5 mm로 약 30 mm의 편의가 발생하였다.
3.2 데이터 전처리
사용된 레이더 합성 강우는 환경부의 S-밴드 이중편파레이더를 합성하여 변환된 전국단위 강우레이더 자료이며, 현업에서 사용중인 비차등위상차 반사도(RZDP_RG)를 이용한 강우값이 사용되었으며 시간해상도는 10분, 공간해상도는 250 m이다. 또한 원활한 학습이 가능하도록 지점강우를 IDW 공간보간 기법으로 레이더 합성 강우와 같은 격자크기로 가공하였으며 레이더 합성 강우 및 지점 강우의 정보는 Table 2에 정리하였다.
Table 2.
Summary on input dataset information
| Features | rows | cols | Cellsize (m) | Period | Temporal resolution |
| Radar rainfall | 2500 | 2100 | 250 | 2017.7.16. 00 ~ 13 h | 10 minute |
| Gauge rainfall | 2500 | 2100 | 250 | 2017.7.16. 00 ~ 13 h | 10 minute |
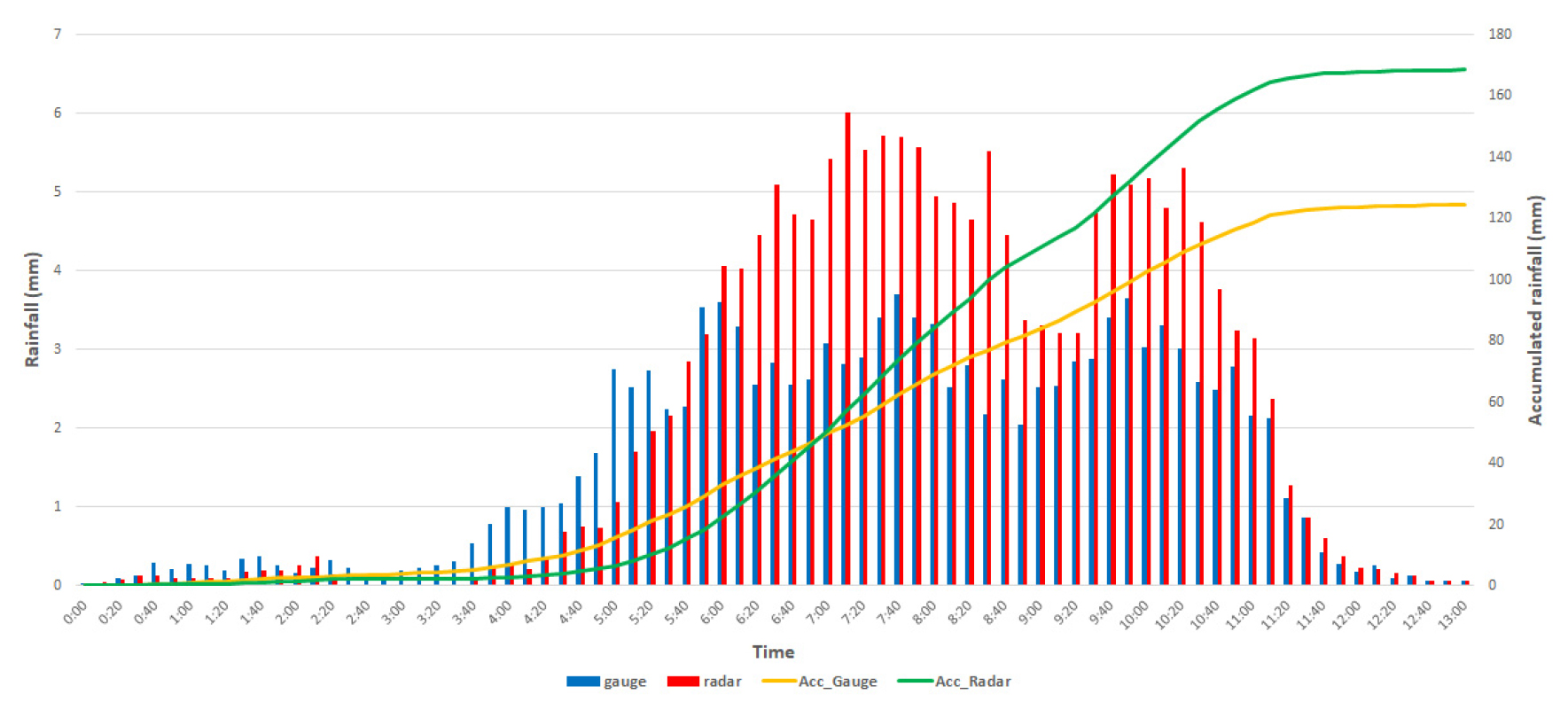
그리고 해당 강우사상의 레이더 합성 강우와 지점 강우를 유역 면적평균 강우로 변환하여 누적 강우량과 같이 Fig. 3에 도시하였다. 레이더 합성 강우의 경우 사상 초기에 지점 강우량보다 낮은 추정치를 보이나 강우강도가 강해지는 시점부터 전체적으로 지점강우보다 과대 추정되고 있으며 이로 인하여 누적 강우량 또한 지점 강우량보다 레이더 합성 강우량이 높은 강우추정치를 보여주고 있다.
수문해석모형의 좀 더 정량적인 유출해석결과를 산정하기 위해 위와 같은 편의를 줄이는 것이 중요하며 CAE 모델을 사용하여 레이더 합성 강우 추정량의 편의를 보정하고자 한다. 두 입력자료의 한반도를 대상으로 한 초기 격자 개수는 2100 × 2500이며, 미호천 유역에서 면적평균 강우의 편의 보정을 평가하고자 240 × 240의 크기로 가공하였다. 그리고 면적평균 강우의 산정을 위하여 유역 밖에 위치한 격자형 강우값들은 제거하였다. 이후 CAE 모델의 적용에 앞서 시계열 입력자료로 활용하기 위해 각 입력자료의 격자를 2차원행렬에서 1차원행렬로 변경해주어야 하므로 240 × 240의 격자 개수를 가진 자료를 1차원행렬로 변환하여 1 × 57600으로 구축하였으며 강우 지속시간이 790분인 10분단위 강우자료이므로 79 × 57600으로 변환하여 모델의 입력자료로 활용하였다.
4. 결과 및 분석
본 연구에서는 전술한 바와 같이 지점 강우와 비교하여 레이더 합성 강우의 편의를 CAE 모델을 이용하여 보정하였다. 이후 유역 면적평균 강우로 변환하여 해당 유역으로 떨어지는 강우의 정확도를 평가하였으며, 격자별 보정 성능을 평가하기 위하여 유역 내 대표 강우관측소 3개소를 선별하여 해당 격자에서의 편의 보정 결과를 도시하였다.
강우 보정 결과의 정확도를 정량화하기 위해 RMSE (Root mean square error)와 NSE (Nash-Sutcliffe efficiency), P-BIAS (Percent bias)를 산정하였으며, 개별 수식은 Eqs. (3), (4), (5)과 같다.
여기서 N은 자료의 개수, 와 는 시간 t에서의 지점 강우와 레이더 합성 강우, 는 지점 강우의 평균값을 나타낸다.
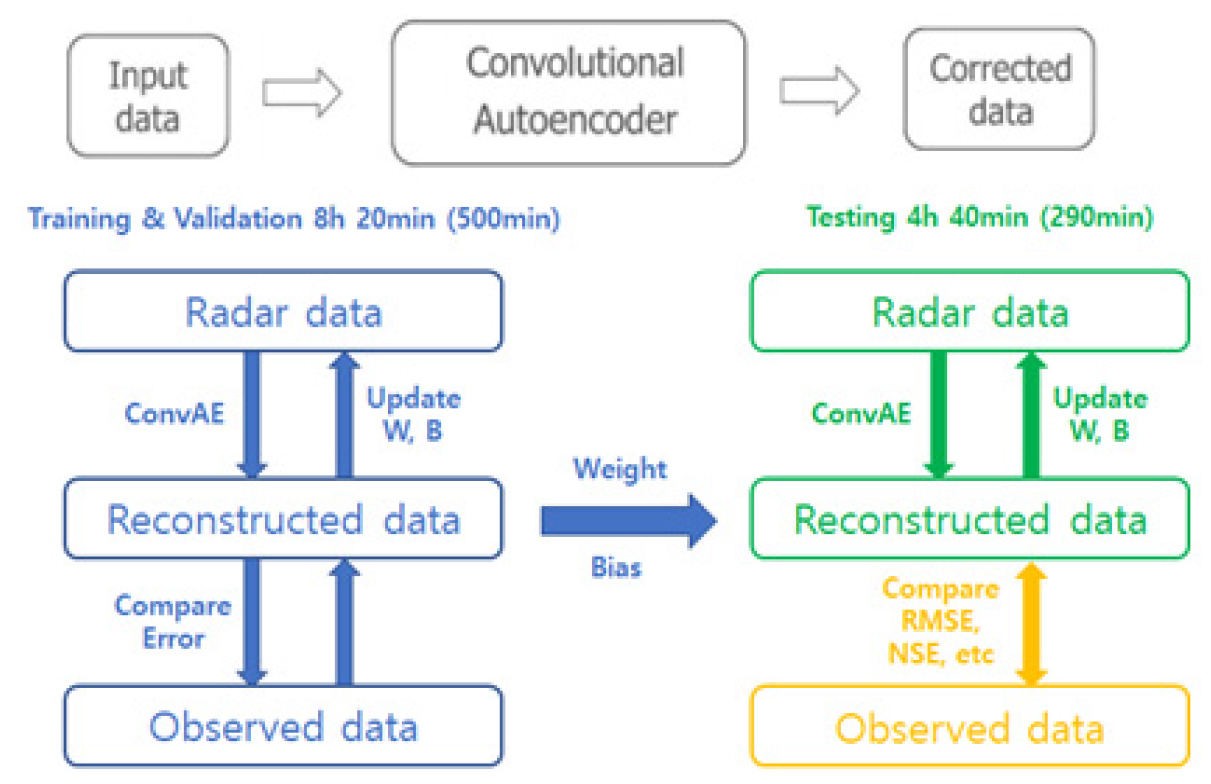
사용된 입력자료는 2017년 7월 16일 약 13시간 동안의 10분단위 자료이며 0시부터 8시 10분까지는 학습(training)자료, 8시 20분부터 13시까지는 검증(validation)자료로 사용하였으며 편의보정을 수행하는 과정은 Fig. 4에 나타내었다.
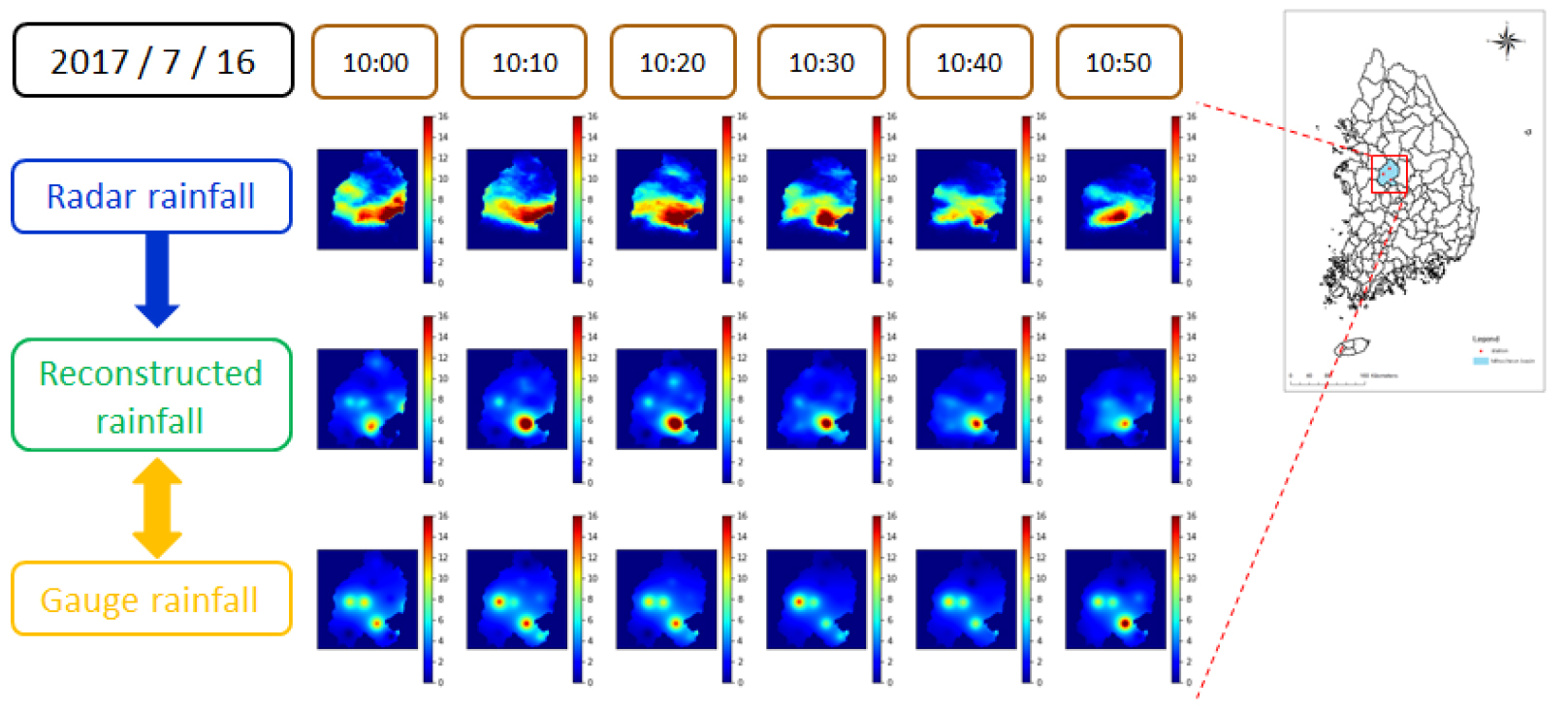
CAE 모델의 학습 결과, 본 연구에 사용된 검증 기간 중 2017년 7월 16일 10시 00분부터 10시 50분까지의 보정 결과를 시각화하여 Fig. 5에 나타내었다. Fig. 5에 따르면 레이더 합성 강우의 경우 지점 강우보다 강우의 공간적 분포가 크고 시각적으로 지점 강우 대비 과대추정된 것을 확인할 수 있다. 이를 보정한 결과, 지점 강우를 기반으로 강우의 공간적 분포가 변화되었으며 각 시간대별 공간적 분포는 유사하게 보정되었다.
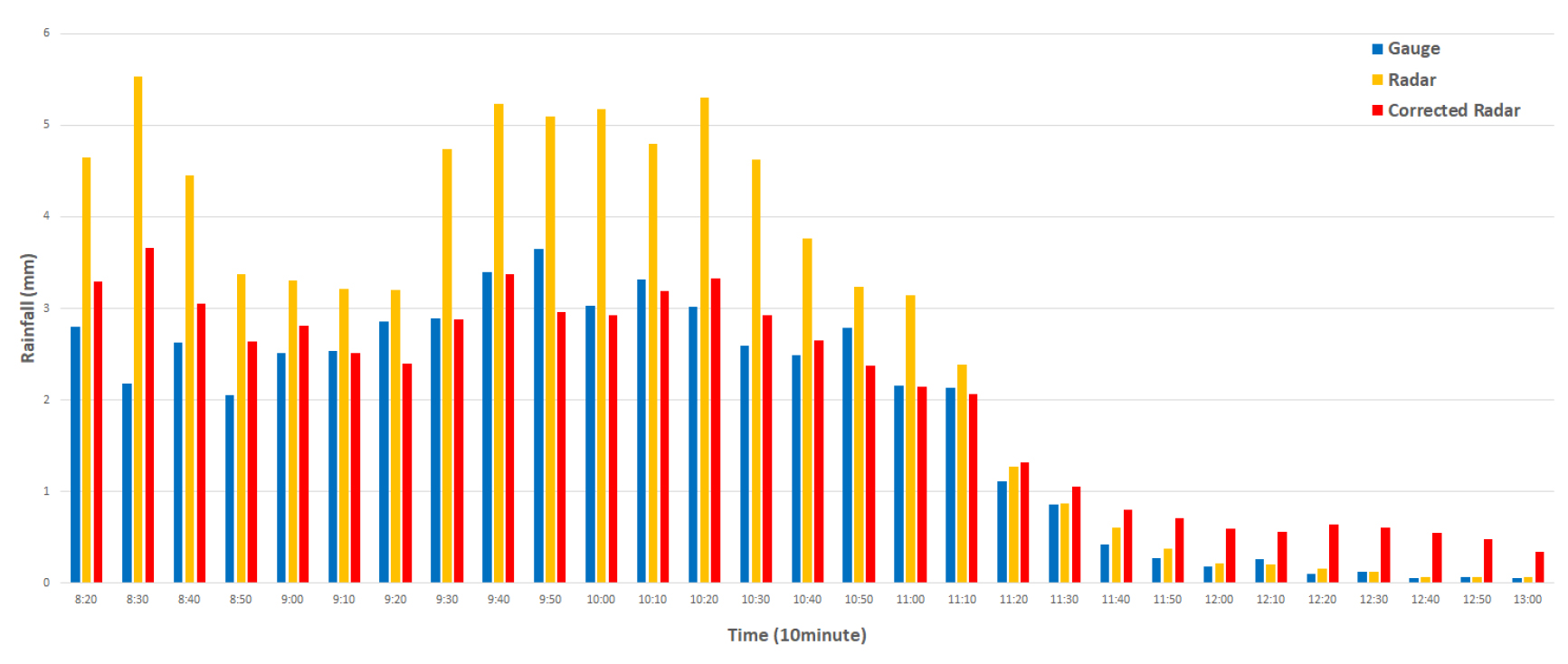
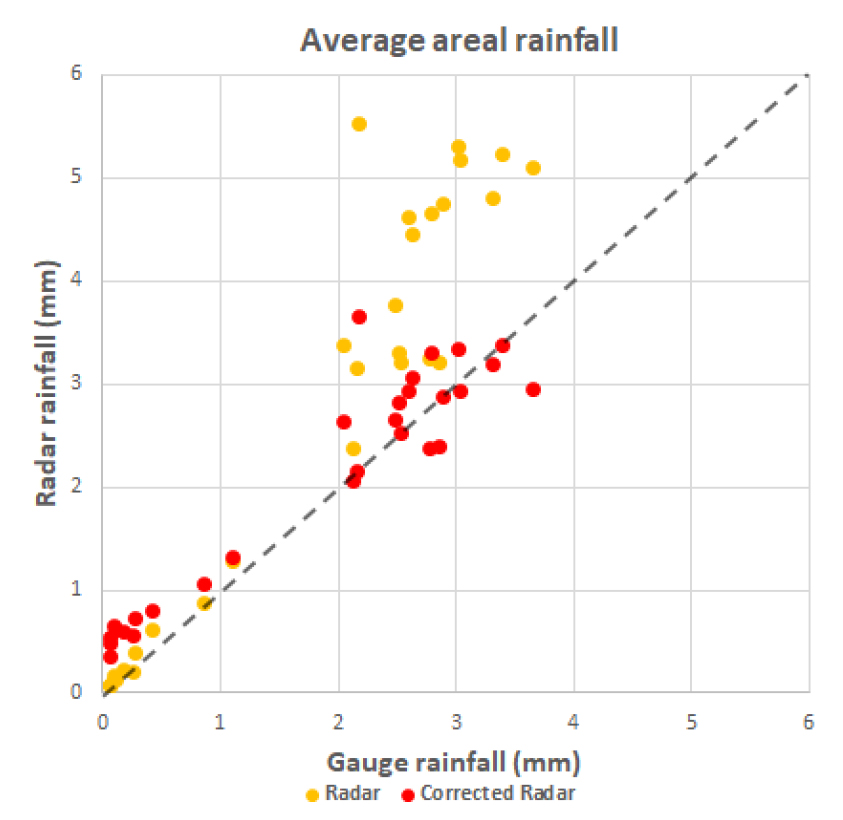
유역 내에서의 편의 보정 결과 비교를 위하여 각 면적평균 강우량을 Fig. 6에 도시하였으며, 보정 전의 레이더 합성 강우와 지점 관측 강우의 시간대별 유역 면적평균 강우량을 비교하였을 때 강우 패턴은 일부 유사하지만 레이더 합성 강우가 과대 추정된 것을 볼 수 있다. 그리고 보정된 레이더 합성 강우는 각 시간대별 전체적인 강우량이 감소하여 지상 관측 강우량의 범위로 줄어든 것을 확인하였다. 하지만 11시 20분 이후로 13시까지는 강우량의 편의가 증가하고 있어 낮은 정확도를 보이고 있다. 이를 좀 더 시각적으로 확인하기 위하여 Fig. 7에 산포도를 도시하였으며, 레이더 합성 강우는 지점 강우에 비해 과대추정됨을 확연히 볼 수 있다. 보정 이후 전체 강우량 중 1.5 mm 이상의 강우는 지점 관측 강우와의 편의가 개선됨을 확인할 수 있으나, 1.5 mm 미만의 강우에서는 오히려 보정 전의 레이더 합성 강우보다 정확도가 낮아지는 것으로 나타났다. 이는 CAE 모델을 학습할 때 한가지 강우 사상만으로 훈련과 검증을 나누어 사용하여 학습량 결여로 인한 오류로 판단되며, 학습에 사용되는 강우 사상이 많을수록 그 결과는 좀 더 높은 정확도를 가질 것으로 판단된다.
또한 편의 보정 결과를 정량적으로 확인하기 위하여 RMSE, NSE 및 P-BIAS를 계산하여 Table 3에 나타내었다. 해당 표에 따르면 RMSE가 보정 전 6.992 mm에서 보정 후 2.423 mm로 상승하였으며 NSE는 -0.109에서 0.867으로 상승하였다. 시뮬레이션된 자료의 평균 경향이 관측값보다 크거나 작음을 측정하고 최적값이 0인 특징을 가진 P-BIAS는 -50.856에서 -12.003으로 상승하여 CAE 모델을 이용해서 편의가 개선됨을 확인할 수 있다. 음수값이 나타내는 특징은 시뮬레이션된 자료가 관측값보다 과대추정 되었음을 의미한다.
Table 3.
Comparison of average areal rainfall of bias-correction result
| Composite Radar | RMSE (mm) | NSE | P-bias |
| Original rainfall | 6.992 | -0.109 | -50.856 |
| Corrected rainfall | 2.423 | 0.867 | -12.003 |
따라서 보정된 검증 기간의 레이더 합성 강우는 보정 전보다 지점 강우와의 편의를 줄이는데 성공하였으며 이는 실제 내린 지점 강우를 기준으로 기존 레이더 합성 강우보다 좀 더 정확한 유역 면적평균 강우를 제공할 수 있을 것으로 분석되었다. 그러나 11시 00분 이후, 즉 강우강도가 낮아지는 시점부터 보정된 레이더 합성 강우가 지점 강우와의 편차가 증가하는 것으로 나타났다.
그리고 미호천 유역 내 선별된 청주시(흥덕교), 천안시(병천초교), 진천군(진천여중) 강우관측소의 해당 지점별 편의 보정 결과를 Fig. 8에 도시하였으며, 정량적 평가 결과를 Table 4에 나타내었다. 먼저, 청주시(흥덕교) 관측소의 경우 RMSE는 45.839 mm에서 28.709 mm, NSE가 -0.953에서 0.234로 보정 이후의 결과가 기존 강우량보다 정확도가 개선된 것으로 나타났다. 하지만 P-bias는 -27.442에서 -39.884로 오히려 하강하였으며 이는 전술한 11시 00분 이후 강우강도가 낮은 시간대에서 과대추정되는 현상으로 인하여 값이 하강한 것으로 판단된다. 천안시(병천초교) 관측소의 RMSE는 23.136 mm에서 26.135 mm, NSE는 0.342에서 0.160, P-bias는 45.605에서 52.806의 결과를 보였다. 천안시 관측소의 경우 보정 이후 강우의 편의를 개선하지 못하였으며 전체적으로 강우량이 과소추정되었다. 마지막으로 진천군(진천여중) 관측소는 RMSE가 6.611 mm에서 6.089 mm, NSE가 0.102에서 0.239로 청주시 관측소와 마찬가지로 개선된 결과를 보이나 P-bias는 -71.923에서 -79.615로 낮은 강우강도 부분에서 과대추정으로 인한 편의가 다량으로 발생하였다. 이는 Fig. 8의 산포도에서도 명확히 확인할 수 있으며 대략적으로 강우량이 2 mm 이하에서 과대추정되었으며 그 이상의 강우량에서는 개선된 것으로 나타난다. 강우강도가 낮은 시간대에서 보정 이후의 강우량이 개선되지 못한 점은 본 연구에 사용된 각 데이터의 개수가 79개(790 min)로 한정되어 있어, 빅데이터의 범주에 속하지 못하여 CAE 모델 활용 시 심층학습이 완전히 이루어지지 않은 학습량 결여로 판단된다.
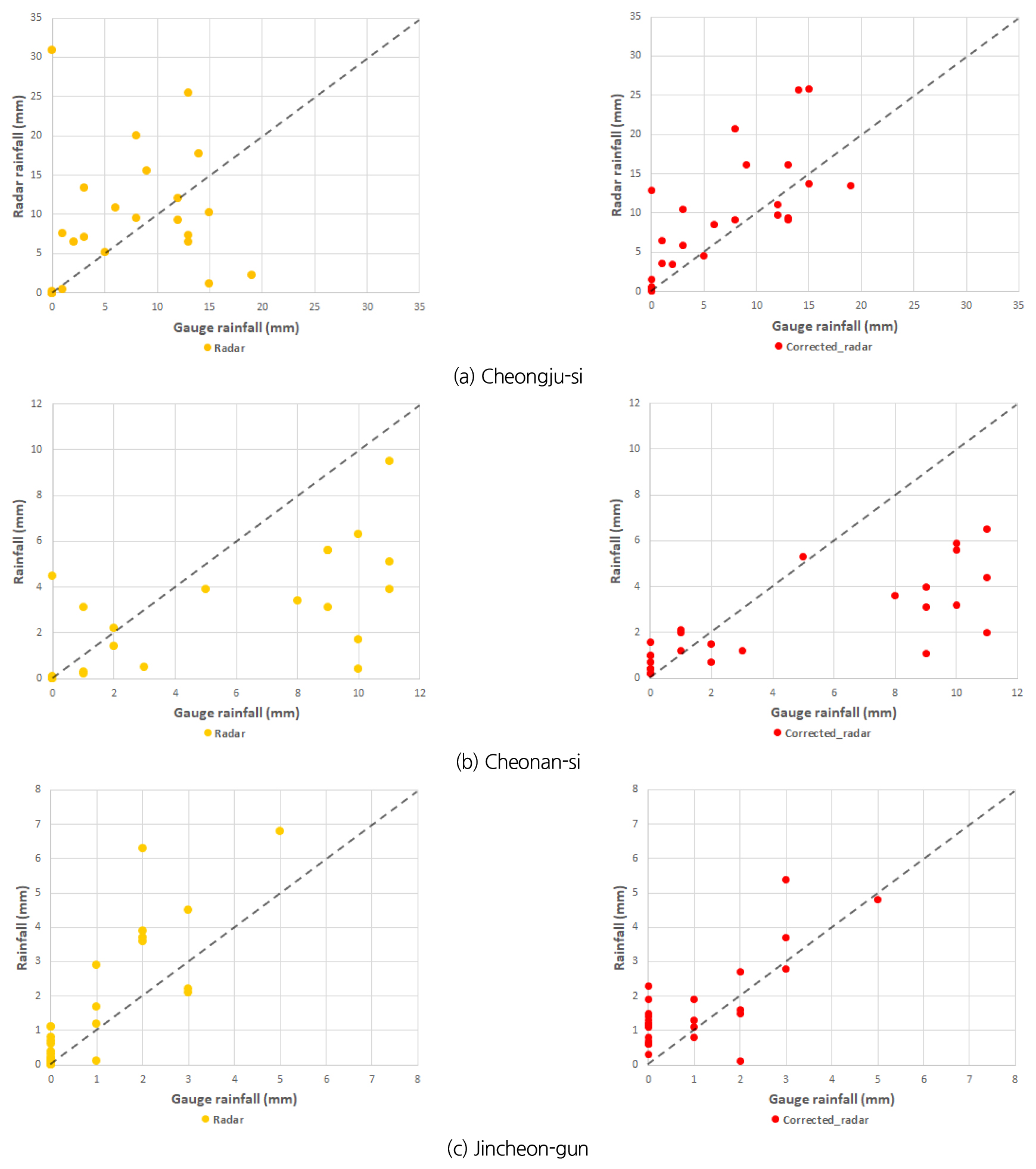
Table 4.
Comparison of point rainfall of bias-correction result
5. 결 론
본 연구에서는 블랙박스(black-box) 모델인 합성곱신경망 기반의 CAE 모델을 활용하여 지상 관측 강우 대비 시공간적 변동성이 이점인 레이더 합성 강우데이터의 편의 보정을 수행하고 미호천 유역 면적평균 강우로 변환하여 그 결과를 비교·분석하였다. 입력자료는 환경부의 10분단위 레이더 합성 강우자료와 같은 공간해상도로 보간된 지점 관측 강우자료를 사용하였으며 자료의 기간은 미호천에 홍수경보 발령이 있었던 2017년 7월 16일 00시부터 13시까지 13시간의 자료를 활용하였다.
본 연구에서 구축한 CAE 모델의 편의 보정 정확도를 정량적으로 평가한 결과는 다음과 같다. 보정 전의 레이더 합성 강우와 지상 강우의 면적평균강우 비교·분석 결과는 RMSE: 6.992 mm, NSE: -0.109, P-BIAS: -50.856으로 나타났으며, 이에 반해 보정 이후의 레이더 합성 강우는 RMSE: 2.423 mm, NSE: 0.867, P-BIAS: -12.003으로 우수하게 산정되어 레이더 합성 강우의 편의 보정을 위한 CAE 모델의 사용은 적합한 것으로 분석되었다. 또한 유역 내에서 관측소 지점별 편의 보정 정확도를 평가하기 위하여 3개 관측소를 선별하여 비교·분석 하였으며, 그 결과로 보정 이후 일부분은 개선되지 못한 것을 확인하였으나 사용하는 자료의 품질과 더 많은 자료를 확보하여 CAE 모델을 이용한 편의보정을 수행한다면 더욱 높은 정확도를 보일 것으로 판단된다.
시·공간적 변동성이 강한 강우의 특성상 지점 관측 강우를 이용하여 정확한 유출해석을 수행하기에 한계가 존재하여 시·공간적 추적이 가능한 레이더 강우자료의 활용성이 증가하고 있다. 하지만 많은 장점에도 불구하고 관측하는 방식과 기상학적 변수 및 강우강도 변환 등으로 인하여 실제 강우와의 정확도가 떨어지는 불확실성이 존재한다. 따라서 레이더 강우 자료를 활용한 실시간 강우-유출해석이 목적인 경우 자료의 각 격자별 특성을 데이터화 하고 학습하며 공간적 변동성을 반영할 수 있는 CAE 모델은 레이더 강우의 편의 보정에 있어 충분히 활용 가능할 것으로 판단된다.
특히, 빅데이터의 활용 및 슈퍼컴퓨터의 사용으로 본 연구에 사용된 CAE 모델 이외에도 타 알고리즘과 합성하여 더욱 우수한 성능을 낼 수 있는 확장성이 존재하며 여러 강우-유출 모형과의 연계를 통하여 향후 홍수 예·경보 시스템 구축 시 중요한 부분으로 활용이 가능할 것으로 분석되었다.
