

1. 서 론
2. 연구 방법
2.1 대상구간 선정
2.2 모델 개요
2.3 GPS전자부자를 이용한 Lagrangian 방식의 수리량 계측
3.연구결과
3.1 대상구간 GPS 전자부자 유하 결과
3.2 대상구간 LPT 모듈 모의 결과
3.3 LPT 모듈 모의 결과와 GPS전자부자 유하 비교·분석
4. 결 론
1. 서 론
하천에서의 발생한 수질오염사고의 신속한 대응예측에 있어서 모델링 기법은 크게 수리모델과 오염물질의 이송・확산모델로 구분되며, 특히 흐름에 따른 오염물질의 이송과정을 지배하는 수리모델의 정확도는 매우 중요하다. 따라서 대상하천의 다양한 조건에서의 수리특성을 모델이 정확하게 예측하고 있는가에 대한 실질적인 검증방법이 필요하다. 그러나 모델의 검증에 있어 필요한 현장실측자료를 확보하는 과정에서 장비에 따른 다양한 유형의 제약이 따른다. 그 중 폭이 넓은 대하천에서 가장 많이 이용되고 있는 ADCP의 경우 일정한 간격의 측선에서 준정상상태를 가정하고 공간분포를 측정하는 Eulerian 방식의 장비이며, 이동측정법을 통한 신속한 측정이 가능하고 도섭으로 측정할 수 없는 고수심에서도 측정이 가능하다. 그러나 수심이 0.6 m 이하인 경우 유속 측정은 가능하지만 유속 정확도가 크게 떨어지며, 수심비에 따른 오차가 발생한다(Kim et al., 2015). 또한 ADCP의 활용지침에 의하면 수면 부근의 측정불가역의 비율이 40% 이상일 때 측정에 부적절한 단면으로 판단하며(Kim et al., 2008), 다양한 유량 측정기기와 ADCP를 이용한 유량 비교 분석에서 단면적과 평균 유량은 ADCP가 크게 나타났다. 이런 현상이 나타나는 이유는 ADCP 특성상 직접적인 유속측정이 불가능한 추정역을 계산하여 유량을 산정하기 때문에 다른 기기보다 단면적이나 유량이 조금 높게 나타난다(Ji et al., 2013). 특히 유량에 대한 오차의 경우 ADCP 이동측정법을 이용하여 측정 시 유량의 오차율이 10%를 넘는 경우가 20 m3/s 이하의 유량에서 2개 존재하고(Lee et al., 2010), ISO 748 (ISO, 1997)에 따르면 평균 유속이 느릴수록 유속 측정 시간에 기인한 불확실도가 커지며, 평균 유속 0.1 m/s의 저유속에서 평균 유속 대비 유속의 불확실도가 커진다(Lee et al., 2005). 이러한 특징으로 인해 ADCP는 0.6 m 이하인 저수심과 저유속에서 정확한 유속을 측정하기에 많은 한계를 가진다. 다음으로 많이 사용되는 장비인 FlowTracker의 경우 도섭을 통해 유속을 측정하는 장비로써 0.001 m/s의 높은 정확도를 가지지만 도섭으로 인한 고수심 고유량기에 측정에 있어 큰 제약이 따른다. 이러한 장비별 장단점을 이유로 전체적인 유량이 감소하여 수심이 얕아지는 갈수기의 경우에는 ADCP와 같은 장비를 운영하여 수리량을 측정하기에 무리가 있으며, 홍수기와 같은 유량이 급증하는 시기에는 FlowTracker와 같은 도섭을 이용한 유속계의 이용을 통한 수리량 측정에 무리가 있다. 따라서 본 연구에서는 흘수가 정해져 있어 수심에 따른 유속변화에 민감하지 않으며, 위와 같은 Eulerian 방식이 아닌 입자를 따라 그 입자의 물리량을 나타내는 방식인 Lagrangian 방식의 GPS 전자부자를 이용한 수리량 측정을 통해 수리모델 검증을 수행하였다. GPS 전자부자의 경우 기존의 부자법으로 측정하던 유속 측정에서 부자에 GPS 센서를 추가함으로써 GPS에 의한 위치 결정으로 인해 보다 정확한 유속측정이 가능한 장비로써, 유류오염물질 거동 해석에 관한 연구가 주를 이루고 있으며(Jang et al., 2016), 부자별 흘수에 따른 유속 오차를 줄이기 위한 보정계수에 관한 연구가 진행되고 있다(Ryu et al., 2010). 앞서 언급한 Lagrangian과 Eulerian 방식의 가장 큰 차이는 공간상에서 지점의 이동과 물리량의 변화에 있으며, 입자에 대한 관점에서의 물리량을 표현하는 방식을 Lagrangian이라 할 수 있다. 이러한 차이로 인해 Lagrangian 방식의 측정은 유류 및 부유성 오염물질의 측정을 중점적으로 연구 진행되고 있으며, 표면에서의 물리량으로 인해 표면유속과 평균유속의 방정식을 이용하지 않을 시 평균유속을 산정할 수 없다는 단점을 가지고 있다. Eulerian의 경우 지점에서의 측정을 통한 정확한 점유속에 해당하는 수리량을 측정할 수 있으나, 공간 분포에 있어 작은 범위를 가지기에 측정에 있어 많은 시간과 인력이 소모되는 단점이 존재한다. 이렇게 Lagrangian 방식으로 측정된 수리량을 통해 수리모델을 검증하기 위해 EFDC 모델을 선정하여 연구를 진행하였다. EFDC 모델의 선정이유는 모델 내의 모듈 중 Lagrangian 입자 추적이 가능한 LPT 모듈을 이용하여 실제 Lagrangian 방식으로 유하하는 GPS 전자부자와의 비교를 통한 검증을 수행할 수 있기 때문이다. 본 연구에서는 대상구간인 강정고령보에서 달성보 사이의 구간에서 Lagrangian 방식의 GPS 전자부자를 유하시켜 수리량을 측정하고, EFDC 모델의 LPT 모듈을 통해 모의된 결과와 비교 검증하였다.
2. 연구 방법
2.1 대상구간 선정
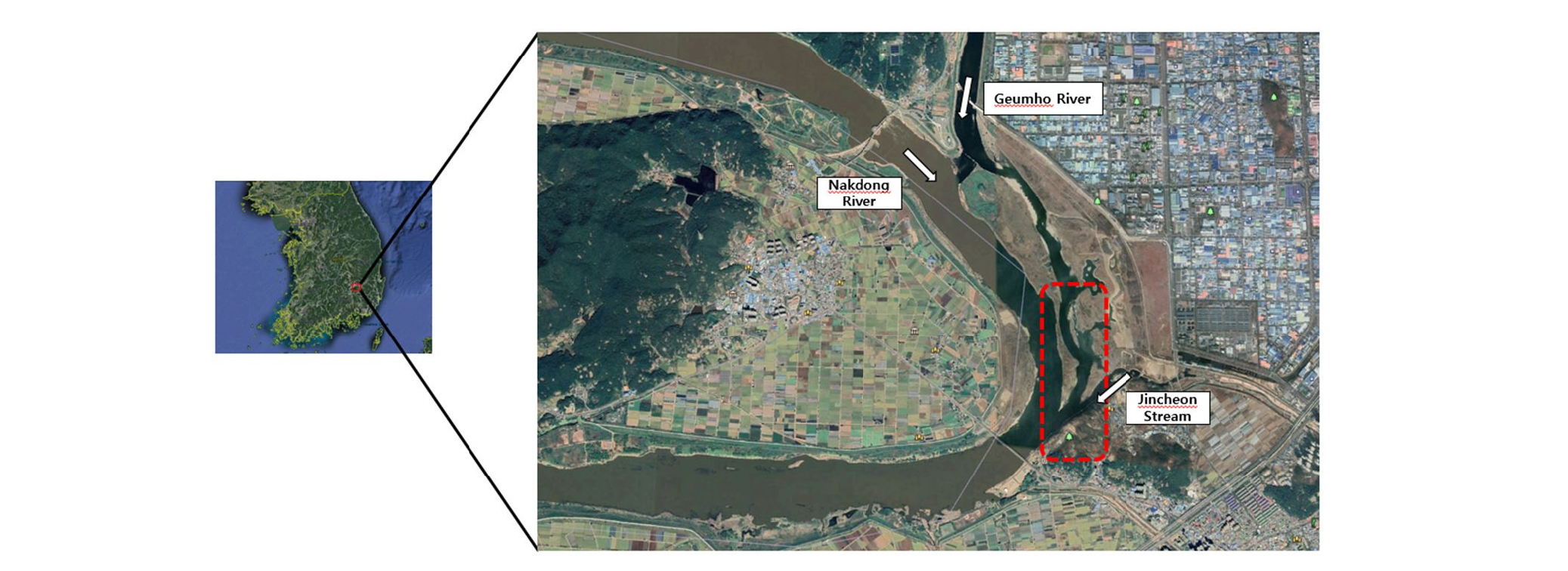
대상구간은 강정고령보에서 달성보 사이의 낙동강 본류 구간으로써 낙동강, 금호강, 진천천이 합류하는 지점이며, 지천의 유입으로 인한 만곡부의 형성으로 인해 우안에서 좌안으로 흐르는 수리학적 특성을 지닌다. 또한 대상구간이 위치한 낙동강은 중·하류 지역에 산업단지가 조성되어 있으며, 하류의 대부분의 도시가 낙동강을 상수원으로 이용하고 있다(Jang et al., 2016). 이러한 특성을 갖는 Fig. 1과 같은 지점을 본 연구의 적용 대상구간으로 선정하였다.
2.2 모델 개요
EFDC 모델은 미국 버지나아 해양연구소에서 개발 되었으며, 수치모델링을 위해 소스코드가 일반인에게 제공된 모델이며(Lee and Park, 2013), 하천, 호소, 저수지, 하구 등 다양한 수체의 지표수에 적용 가능한 3차원 유동해석모형으로써 국내 4대강 수질 관리에 사용되고 있다(Jeon and Chung, 2012; Jeon et al., 2011; Shin et al., 2012).
LPT 모듈은 EFDC 모델 내에 속해져 있는 모듈로써 3차원 Random walk 접근법을 통한 Lagrangian 방식으로 입자의 이동과 물리량을 해석하는 모듈이다. LPT 모듈의 지배방정식은 Eq. (1)과 같이 나타낼 수 있다(Seo et al., 2013).
| $$dx=dx_{drift}\;+\;dx_{ran}\\\;\;\;\;=(u+\frac{\partial K_H}{\partial x})dt\;+\;\sqrt{2K_Hdt}\;(2p-1)$$ | (1a) |
| $$dy=dy_{drift}\;+\;dy_{ran}\\\;\;\;\;=(v\;+\frac{\partial K_H}{\partial y})dt\;+\;\sqrt{2K_Hdt}\;(2p-1)$$ | (1b) |
| $$dz=dz_{drift}\;+\;dz_{ran}\\\;\;\;\;=(w\;+\frac{\partial K_v}{\partial z})dt\;+\;\sqrt{2K_vdt}\;(2p-1)$$ | (1c) |
여기서 dx, dy, dz는 직교 좌표계의 방향를 정의하며, u, v, w는 각 방향으로의 유속, dt는 시간간격, KH, KV는 각각 수평, 수직방향 난류확산계수이며, p는 입자의 브라운운동(Brownian motion)을 나타내기 위해 평균이 0.5인 균등분포(Uniform distribution)상에서 추출한 임의의 수이다(Seo et al., 2013). 2p-1을 이용하여 변환하면 랜덤(Random)항은 평균이 0이고 하한값 -1, 상한값 1인 분포 상에서 하나의 값을 갖게 되며, 따라서 변환된 랜덤항을 통해, 유속에 의한 이송된 입자의 위치로부터 확산항에 따른 입자의 분포를 조절할 수 있다(Seo et al., 2013).
본 연구에서는 EFDC 모델의 LPT 모듈을 통해 대상구간을 모의하였으며, 해당 실험 날짜인 2019년 8월 23일의 강정고령보의 방류량, 달성보의 방류량 그리고 금호강 방류량을 시계열 자료로 입력자료로 삽입하여 모델을 구축하였다.
2.3 GPS전자부자를 이용한 Lagrangian 방식의 수리량 계측
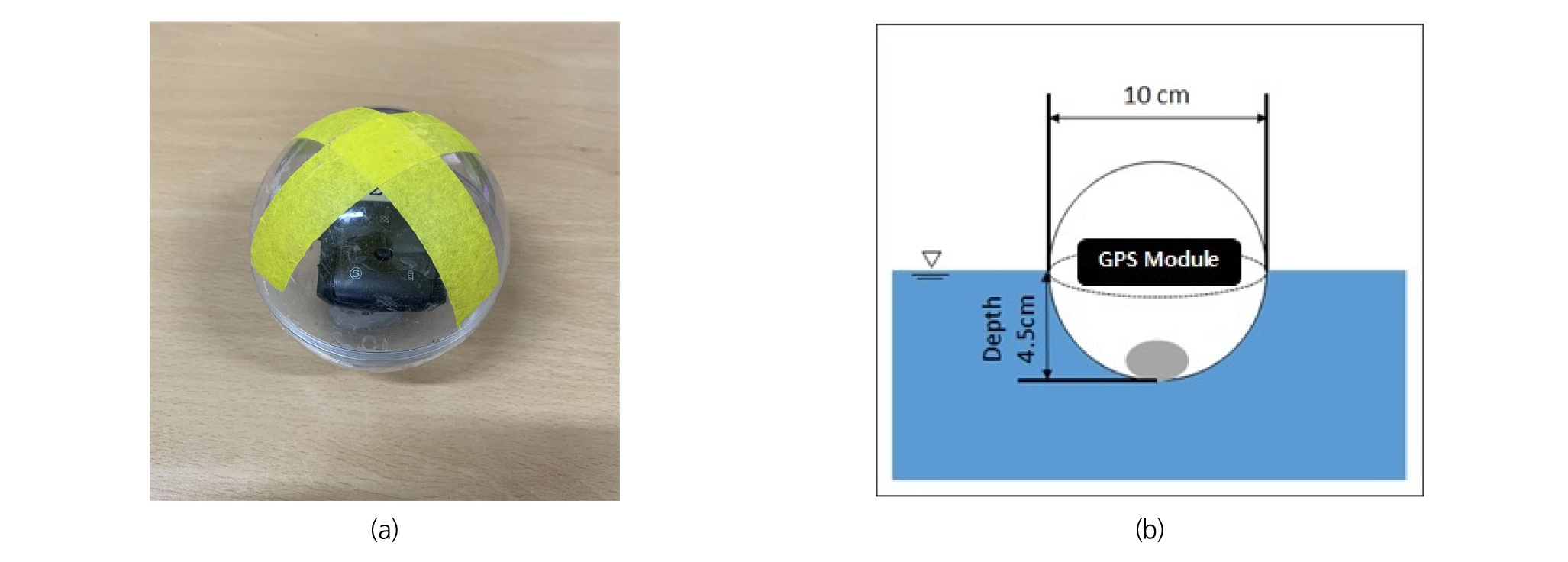
Fig. 2는 본 연구에서 사용된 GPS 전자부자를 나타낸 것으로 기성품인 GPS 모듈을 이용하여 측지기준계(Geodetic Reference System)인 GRS80 타원체를 기준으로 경위도좌표가 지정된다. GPS전자부자의 모듈의 경우 66개의 위성 채널을 가지며 -163dBm의 민감도, DGPS이용, 모션센서, NMEA 0183/PMTK Protocol을 기반으로 이용된다.
GPS전자부자의 유하를 통해 좌표 별 이동거리/ 이동시간으로 유속을 산정하게 되며, 산정되는 방정식은 Eq. (2)와 같다.
| $$\mathrm{ACOS}(\mathrm{SIN}(\mathrm A)\;\ast\;\mathrm{SIN}(\mathrm B)+\mathrm{COS}(\mathrm A)\;\ast\;\mathrm{COS}(\mathrm B)\;\ast\;\mathrm{COS}(\mathrm C-\mathrm D))=\mathrm E$$ | (2b) |
| $$\mathrm E\ast\mathrm R\ast1000/\mathrm S$$ | (2c) |
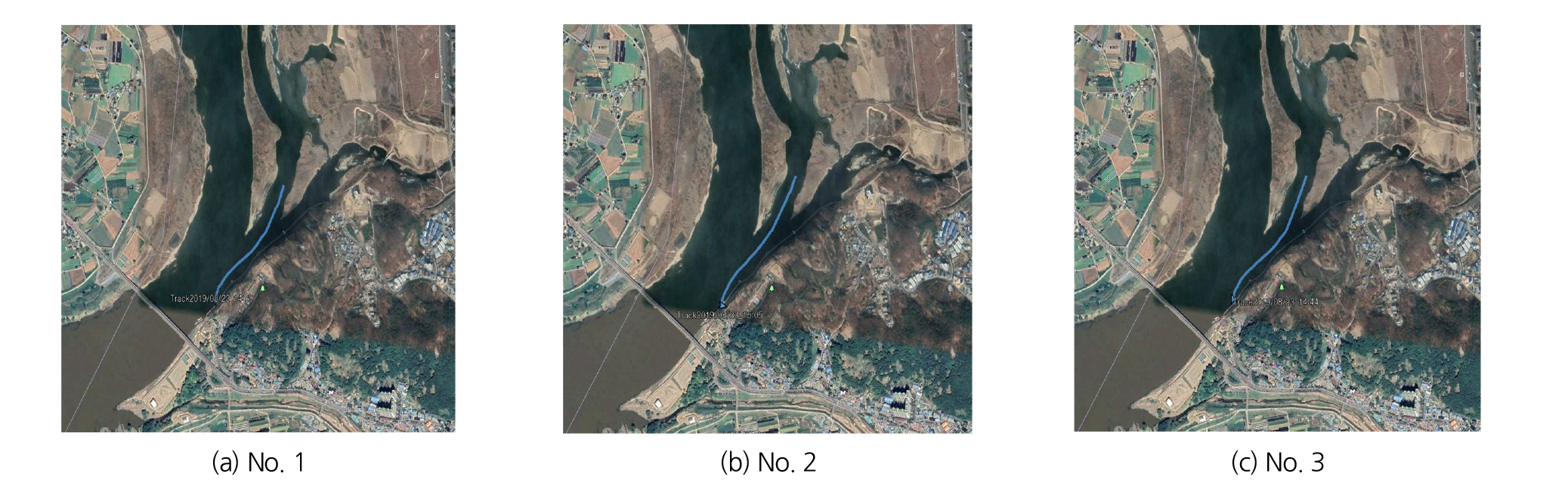
여기서 Lat 1, Lon1, Lat2, Lon2 는 두 지점의 latitude(위도)와 Longitude(경도)를 표현한 것이고, (A, B, C, D)는 위도 경도 별 각도 차이에 따른 거리 값을 계산한 값이다. 위도의 경우 1도일 때 111.195 km의 거리 차이가 생기며, 경도의 경우 1도에 약 88.804 km의 거리 차가 생긴다. 경도는 위도에 기준에 따라 지구의 평균 둘레길이가 달라지기에 위도에 따른 지구 원주의 길이를 기반으로 계산 된다. Eq. (2b)는 계산된 A, B, C, D를 통한 점 사이의 정확한 거리를 계산하기 위해 구면삼각형의 변과 각과의 관계를 삼각함수를 써서 나타내는 구면 삼각법 공식을 사용한다. Eq. (2c)는 구해진 거리에 시간을 나누어 유속으로 계산하며, 위와 같은 식을 통해 GPS전자부자의 유속을 산정하게 된다. 대상구간에서 보트를 이용한 접근으로 금호강 하류 지점에서 총 9개의 GPS전자부자를 유하시켜 이동거리를 위와 같은 식을 통한 산정 후 LPT 모듈 내 입자의 이동거리를 비교분석 하였다. 거리에 대한 비교 분석 후 오차율을 산정하였다. GPS전자부자의 이동거리를 시간으로 나누어 산정한 유속과 LPT 모듈의 입자의 이동거리를 이동시간으로 나누어 산정한 유속을 비교 분석하고 오차율을 산정하였다. GPS 전자부자의 번호별 유하궤적은 Fig. 3과 같으며, 유하 지점은 금호강과 낙동강이 합류하기 550 m 상류 지점으로 선정하여 실험을 진행하였다.
3.연구결과
3.1 대상구간 GPS 전자부자 유하 결과
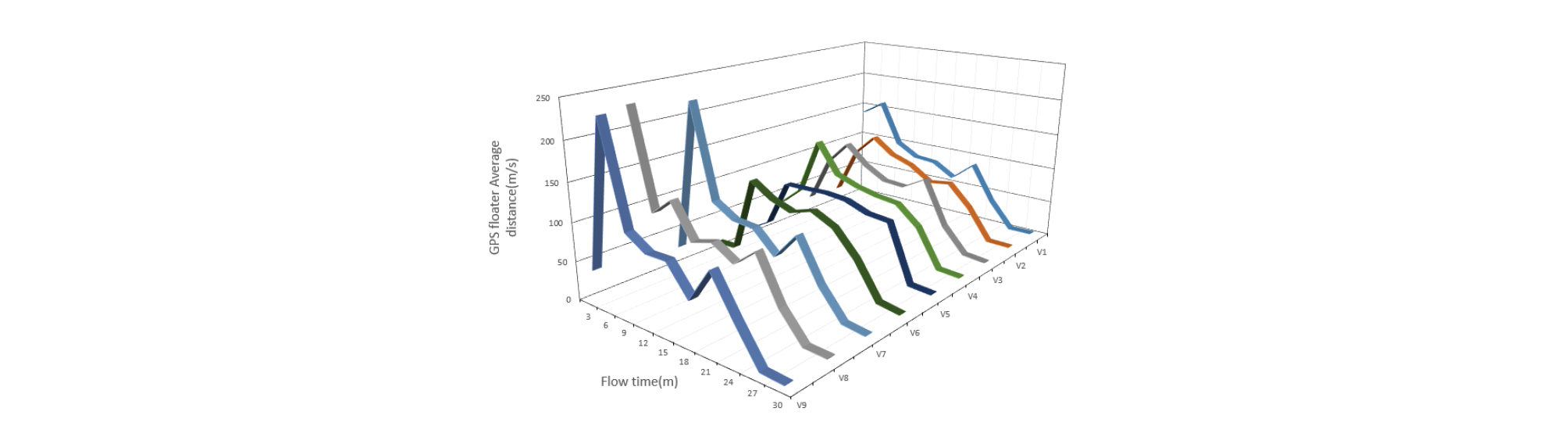
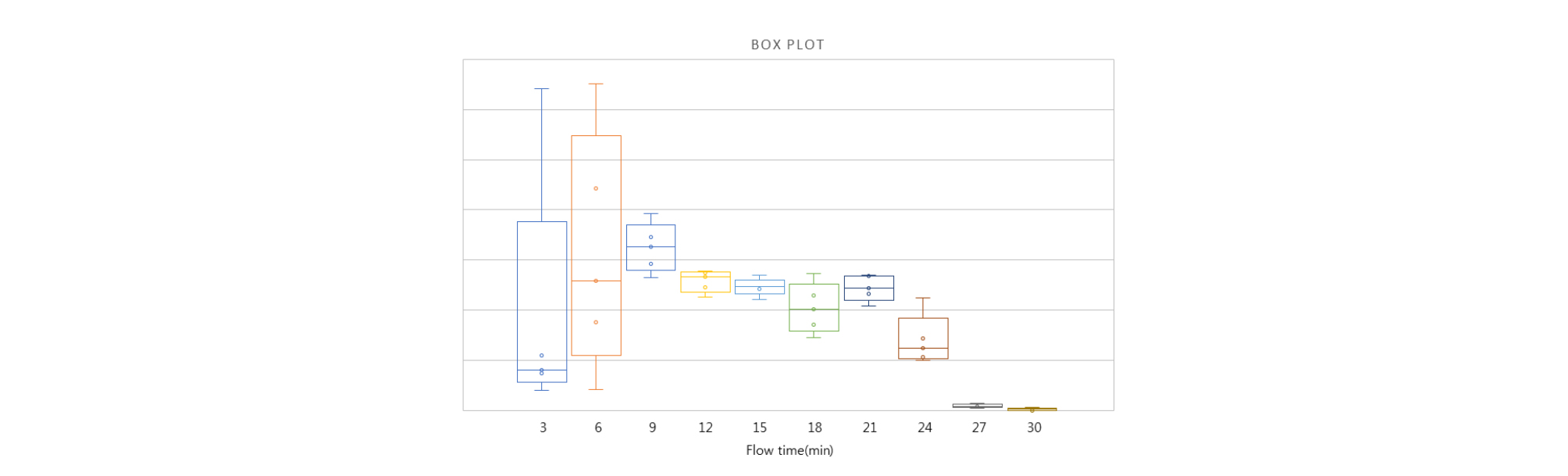
GPS 전자부자의 총 유하 시간은 30분이며, 유하 시간 중 총 이동거리는 평균 688 m이다. GPS 전자부자 투입 후 0분, 3분, 6분, 9분, 12분, 15분, 18분, 21분, 24분, 27분, 30분을 기준으로 Fig. 4와 같은 유하 거리를 Eq. (2d)를 통해 산정하였으며, 유하 지점으로부터 이동거리는 Tables 1 and 2와 같으며, 유하거리로 산정한 유속은 Table 3과 같다. 구간별 GPS 전자부자의 유하거리의 평균값의 오차범위를 15%로 보았을 때 유하 시작 후 9분까지 GPS 전자부자의 유하거리의 오차가 크게 나타나며, 9분 이후 오차가 작아지는 것으로 나타났다. GPS 전자부자의 슬립 및 관성력으로 인한 오차로 판단되며(Fig. 5), 오차의 범위가 작은 구간에서의 신뢰도가 높을 것이라 사료되며, GPS 전자부자의 유하가 멈추기 전까지 점차 시간당 이동거리가 줄어드는 현상을 보인다. Fig. 6에 나타낸 바와 같이 유하 시작과 유하 종료 지점에서의 GPS 전자부자별 오차가 크게 나타났으며, Box plot의 막대는 중간값을 제외한 자료의 범위를 나타내는데, 3 ~ 9분 구간에서 길게 나타나고 중간값을 나타내는 박스의 형태가 막대에 비해 짧아지는 것으로 보아 GPS 전자부자가 가지는 관성력과 슬립(Slip) 현상에 의한 오차로 인한 결과로 판단된다.
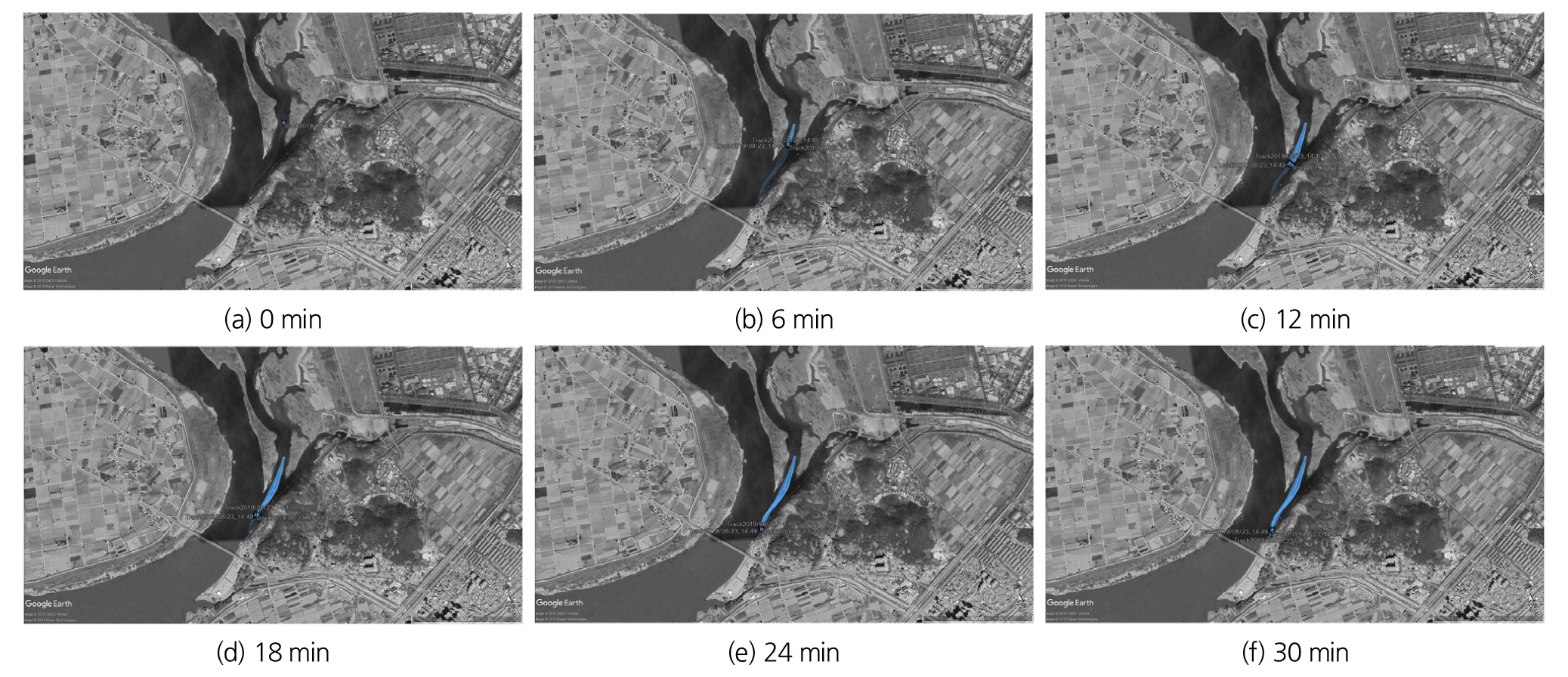
Table 1. Cumulative travel distance of GPS floaters
Table 2. Sectional travel distance of GPS floaters
Table 3. Sectional average velocity of GPS floaters
3.2 대상구간 LPT 모듈 모의 결과
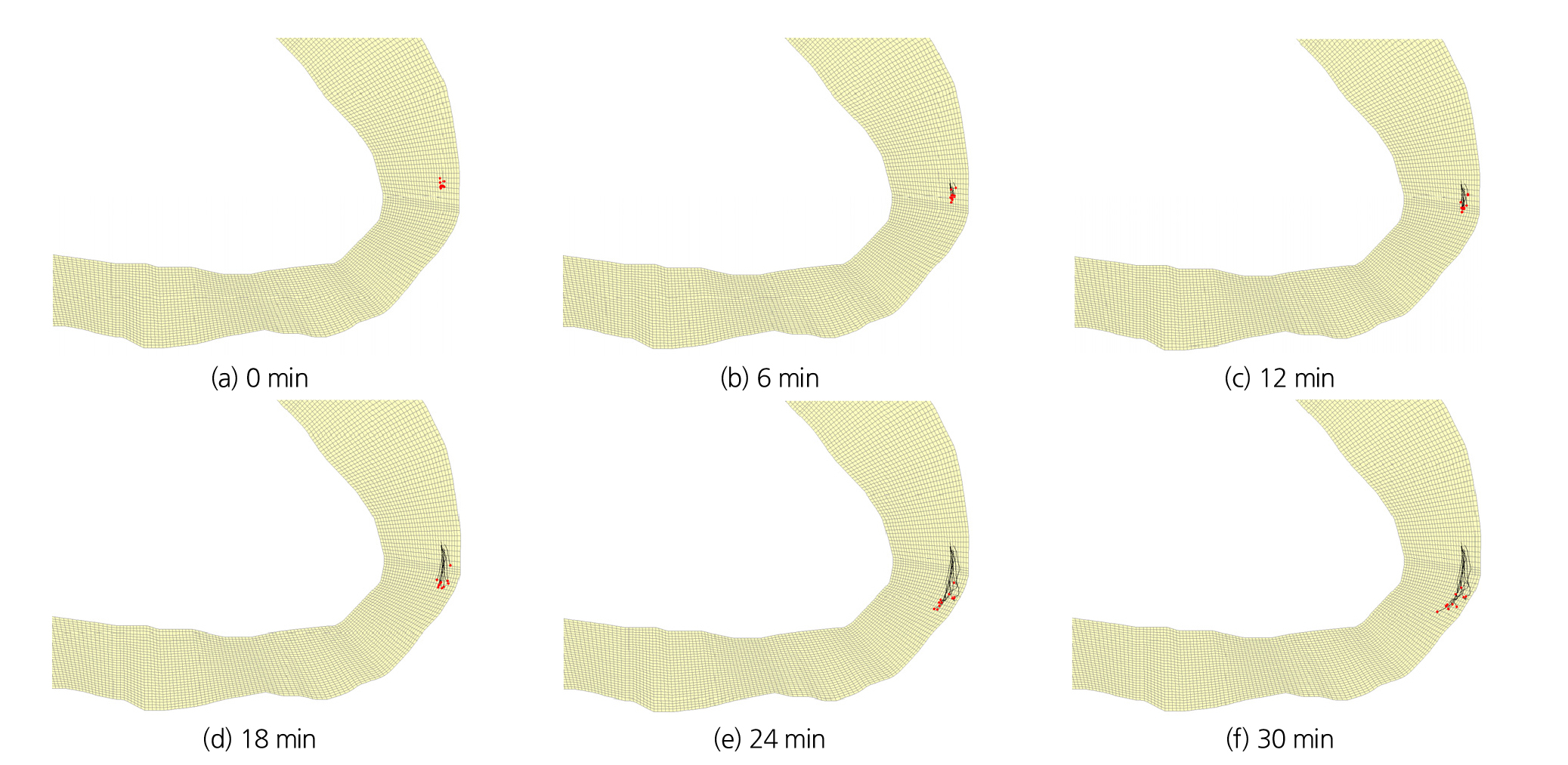
EFDC 모델의 LPT모듈의 모의 시간은 30분이며, 유하 시간 중 총 이동거리는 평균 547 m이다. 유하 지점으로부터 이동거리는 Table 4와 같으며, Lagrangian 입자를 투입 후 0분, 6분, 12분, 18분, 24분, 30분을 기준으로 유하 거리를 Fig. 7로 나타내었다. 6분 간격의 총 5구간의 시간별 이동거리 보았을 때 Lagrangian 입자의 유하가 멈추기 전까지 점차 시간당 이동거리가 줄어드는 현상을 보인다.
Table 4. Average travel distance of LPT simulations
| Time (min) | Sectional travel distance (m) | Cumulative travel distance (m) |
| 0 ~ 6 | 175.7 | 175.7 |
| 6 ~ 12 | 185.4 | 336.9 |
| 12 ~ 18 | 159.8 | 462.9 |
| 18 ~ 24 | 118.6 | 549.2 |
| 24 ~ 30 | 29.6 | 578.8 |
3.3 LPT 모듈 모의 결과와 GPS전자부자 유하 비교·분석
Fig. 8에 나타낸 바와 같이 GPS 전자부자의 이동거리와 LPT 모듈 모의 결과의 이동거리 오차율은 20.4%를 보이며, GPS 전자부자의 이동거리와 이동시간을 통해 유속을 산정하여 LPT 모듈의 입자의 유속을 비교하였다(Table 5). 오차율 산정을 통한 유속의 정확도 및 유하거리의 오차율을 평가하였다(Table 6).
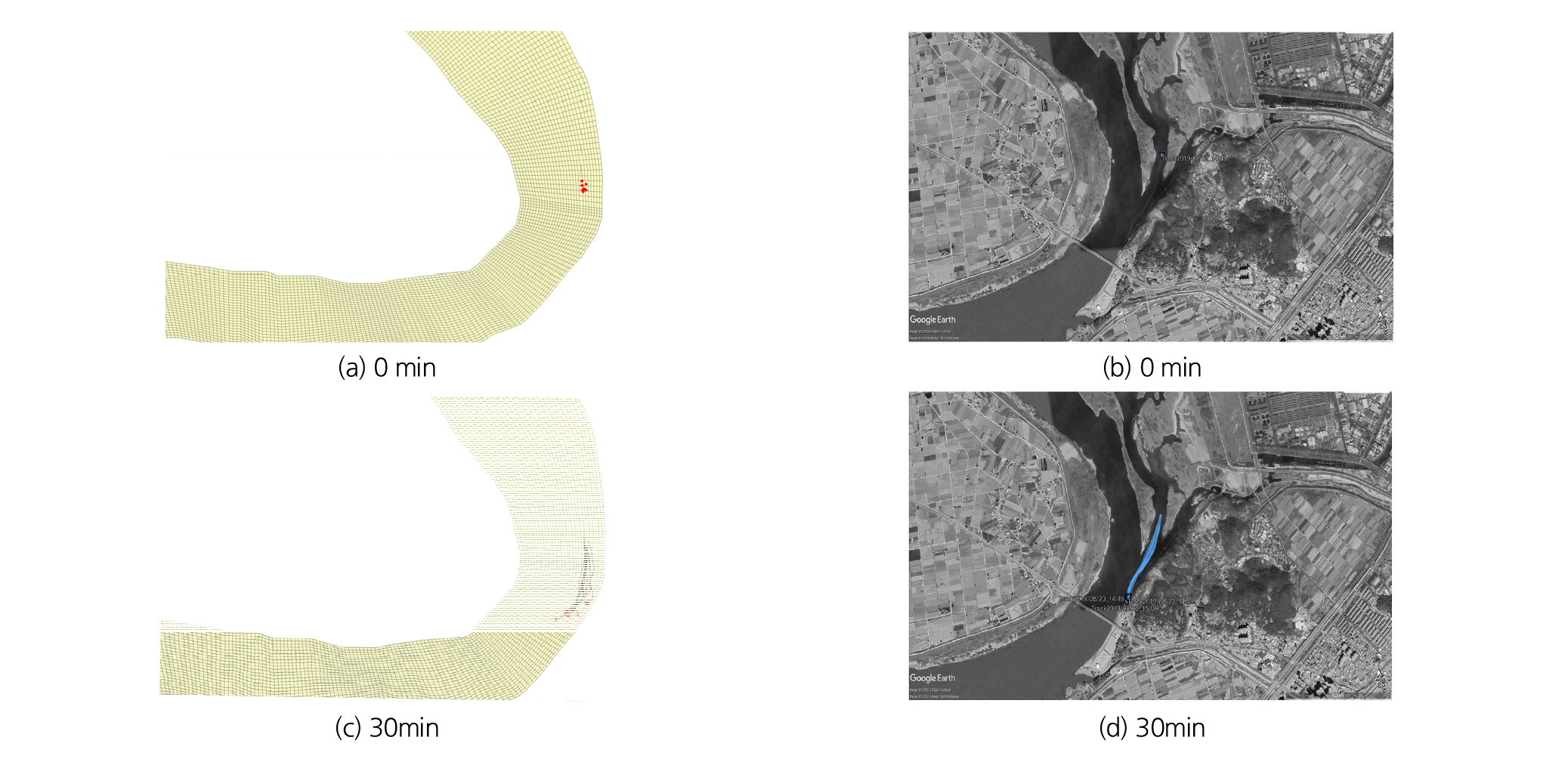
Table 5. Velocity of GPS floaters and LPT Simulations
| Time (min) | Velocity of GPS Floaters (m/s) | Velocity of LPT Simulations (m/s) |
| 0 ~ 6 | 0.49 | 0.49 |
| 6 ~ 12 | 0.52 | 0.58 |
| 12 ~ 18 | 0.44 | 0.45 |
| 18 ~ 24 | 0.38 | 0.38 |
| 24 ~ 30 | 0.08 | 0.01 |
| Average | 0.38 | 0.38 |
Table 6. Error rate by time interval
입자 평균 이동거리 오차율은 최저 0.2%, 최대 15.9%의 오차율을 보이며, 시간별 구간에 따른 이동거리 오차율은 최저 0.2%, 최대 639.5%의 오차율을 보인다. 구간에 따른 오차율의 경우 0~6분구간, 6~12분 구간, 12~18분 구간, 18~24분 구간의 평균 이동거리의 오차율이 낮은 반면, 이동거리의 차이가 큰 24 ~ 30분 구간에서 큰 오차율을 보인다. 유속에 대한 오차율을 보았을 때, 최저오차율 0.0%으로 산정되었으며, 최대오차율은 639.5%로 산정되었다. 24~30분 구간의 최대오차율이 높은 원인은 모델 구축상의 요인으로 실험 구간 하류에 위치한 사문진교의 영향으로 판단된다. 24~30분 구간을 제외한 나머지 구간에서의 평균 오차율은 6.7%이므로 유속의 정확도는 높은 것으로 판단되었으며, GPS 전자부자의 경우 6분당 이동거리에 대한 시간으로 나누어 유속을 산정해 보았을 때 최저 유속이 0.01 m/s, 정체구간을 제외한 나머지 구간의 평균 유속은 3.18 m/s로 산정되는 것을 보아 GPS 전자부자는 저유속 측정이 가능한 것으로 보이며, 이동 경로에 대한 길이를 곡선의 경우 지점의 시작점과 끝점을 잇는 거리가 아닌 총거리를 짧게 나누어 나누어진 총거리의 합을 이용하여 유속 산정 시 유속의 정확도가 향상됨을 보인다.
4. 결 론
수리 모델 검증에 있어 실측값을 이용한 검증이 대부분 이루어지지만, 현장계측을 통해 측정된 수리량은 지점에 대한 고정된 측정을 진행하는 Eulerian 방식으로 측정 되어진 자료인 경우가 많다. 본 연구에서는 이러한 Eulerian 방식으로 측정되는 자료와 달리 입자를 따라 그 입자의 물리량을 나타내는 방식인 Lagrangian 방식으로 측정되는 GPS 전자부자의 유하를 통한 수리량 측정을 통한 수리모델 검증방안을 연구하였다. 대상구간인 금호강이 합류하는 낙동강에서 GPS 전자부자 9개를 유하시켜 이동거리를 측정하였으며, GPS 전자부자의 총 유하 시간은 30분으로 총 이동거리는 평균 688 m로 측정되었으며, LPT 모듈의 경우 Lagrangian 입자의 총 모의 시간은 30분으로 총 이동거리는 평균 547 m로 측정되었다. GPS 전자부자의 이동거리와 LPT 모듈의 모의 결과 비교 시 이동거리에 의한 오차율은 6분에서 0.2%, 12분 12.3%, 18분 15.4%, 24분 19.7%, 30분은 15.9%의 오차율을 보였다. 시간별 구간에 따른 오차율은 0~6분 구간에서 0.19%, 6~12분 구간 10.9%, 12~18분 구간 2.0%, 18~24분 구간 13.5%, 24~30분 구간은 639.5%로 측정되었다. 구간에 따른 오차율의 경우 0~6분 구간, 6~12분 구간, 12~18분 구간, 18~24분 구간의 평균 이동거리의 오차율이 낮은 반면, 이동거리의 차이가 큰 24~30분 구간에서 큰 오차율을 보이지만, 평균 이동거리의 오차율을 평균 해보면 13.60%의 낮은 오차율을 보이며, 시간별 구간에 따른 이동거리 오차율 또한 거리의 오차가 큰 24~30분 구간을 제외 시 6.7%의 낮은 오차율을 보였다. 구간별 GPS 전자부자의 유속 및 유하거리를 비교해 보았을 때, GPS 전자부자 유하 중 정체하는 구간이 발생하는 것으로 나타났다. 이러한 정체구간의 발생 원인으로는 대상구간에서의 사수역이 존재하게 되는데 GPS 전자부자의 경로가 사수역으로 흐르게 됨으로써 발생하게 된다. 앞서 언급한 정체구간의 발생으로 모델 내 입자와 GPS 전자부자의 유하거리의 오차가 크게 발생하게 되는데 이러한 구간에서의 GPS 전자부자의 유하거리와 유속을 통해 모델 검증 정체구간에서의 GPS 전자부자가 가지는 유속 및 유하거리를 제외하여 이용하는 것이 검증 및 보간법에 용이하다. 정체구간을 제외한 구간에서의 GPS 전자부자의 유속과 유하거리를 이용하여 구간별 검증이 가능할 것이라 판단된다. 따라서 ADCP와 같은 Eulerian 방식으로 측정되는 자료와 달리 입자를 따라 그 입자의 물리량을 나타내는 방식인 Lagrangian 방식으로 측정되는 GPS 전자부자를 이용 시 수리모델을 통해 갈수기를 모의할 때 보간방법으로 적합하며, 고유량기에 GPS 전자부자를 활용하여 측정한 실측 자료와 모델 모의 값과의 비교를 통해 검증 자료로 활용될 수 있다. 또한 유류 및 수표면으로 유하되는 물질의 거동 분석에 있어 검증 자료의 이용 시 Eulerian 방식의 ADCP, FlowTracker 장비를 이용하여 측정한 실측값보다 Lagrangian 방식인 GPS 전자부자로 측정한 실측값이 신뢰도가 더 높다고 판단된다. 향후 다양한 대상구간에서의 추가적인 현장실험을 진행하고, Eulerian 격자모의 결과와의 비교분석을 통해 체계적인 검증방법을 개발하면, GPS 전자부자의 유속측정 결과가 실용적인 계측자료로 활용될 수 있을 것으로 사료된다.
