

1. 서 론
2. 연구방법
2.1 실험조건
2.2 수심 분석 방법
3. 연구결과
3.1 연구대상지 하상형태 측정 결과
3.2 RGB영상(SfM) 하상형태 측정 결과
3.3 초분광영상 수심 산정 결과
3.4 수심 산정 결과 비교
4. 결론 및 향후연구
1. 서 론
하천법 개정 및 수자원의 조사·계획 및 관리에 관한 법률 제정으로 하상변동조사를 정기적으로 실시하는 것이 의무화되었고, 지자체가 계획적으로 수자원을 관리할 수 있도록 제도가 마련되고 있다. 하천의 지형측량은 직접 측량할 수 없기 때문에 수심 측량을 통해 간접적으로 이루어지고 있으며, 그 방법은 레벨측량이나 음향측심기를 활용한 접촉식으로 이루어지고 있다. 소하천에서는 직접계측 방식으로 주로 RTK-GPS를 활용하여 측정지점의 위도, 경도 좌표와 표고값을 기록하고, 그로부터 하상의 형태를 구현하고, 수표면 표고값을 이용하여 수심을 산정할 수 있다. 사람이 직접 진입할 수 없는 중규모 하천이나 대하천에서는 ADCP (Acoustic Doppler Current Profiler)를 활용하여 하상에 반사되는 초음파신호를 분석하여 수심과 유속을 측정한다. 또한, 하천설계기준의 유량측정방법에는 일반 유속계, 부자, 표면 유속계, 초음파 유속계 등에 의한 유량측정 방법이 있는데, 그 중 이동 초음파에 의한 유량측정방법으로 ADCP를 이동식 보트에 탑재하여 하천을 횡단하며 수심 및 유속을 측정하는 방법이 있다. 이러한 접촉식 수심조사 기법들은 사람이 직접 하천에 들어가거나, 수면을 이동하는 보트에 탑승해야 하기 때문에 위험성이 높다. 또한, 홍수기와 같은 고유속, 고유량 조건에서 빠르게 변동하는 하상을 조사할 수가 없다는 한계가 있다. 이러한 접촉식 조사기법의 한계를 극복하기 위해 최근에는 원격탐사를 통한 하천조사 기법들이 개발되어 수행되고 있다. 수심연구 분야에서도 레이저 신호를 이용해 하상을 조사하는 LiDAR기법(Ma et al., 2014)이 널리 이용되어 왔으며, 위성 초분광영상을 이용한 하천의 수심조사 연구(You et al., 2008; Legleiter et al., 2009; Niroumand-Jadidi et al., 2022)가 수행되고 있다. 최근에는 경량으로 개발된 초분광센서를 드론에 탑재한 드론플랫폼의 초분광영상을 이용한 하천조사 연구(You, 2019; Gwon et al., 2022; Kwon et al., 2022)가 활발히 수행되고 있다.
기존의 위성이나 항공 초분광영상은 탑재되는 초분광센서는 10개 이내의 밴드에서 분광정보를 추출하며, 고도가 매우 높기 때문에 넓은 지역을 촬영할 수 있지만, 공간해상도가 낮아 국부적인 하천지형이나 특성을 관찰하기 어렵고, 자주 촬영할 수 없기 때문에 시간해상도 역시 낮다는 단점이 있다. 하지만 최근 활발히 연구되고 있는 드론 초분광촬영 시스템은 100개 이상의 밴드에서 분광정보를 획득할 수 있고, 위성이나 항공기보다 낮은 고도에서 비행이 가능하고, 촬영시간도 조사자가 설정하기 편리하여 공간적, 시간적해상도가 매우 높은 초분광영상을 획득할 수 있다. You (2019)는 드론 초분광시스템을 활용하여 공간해상도 7 cm/pixel의 초분광영상을 활용해 수심분포를 산정하였다. Legleiter et al. (2011)은 항공 초분광영상을 이용해 Platte River의 수심을 산정하고, 그를 이용해 두루미 서식의 임계수심 맵을 작성했다. 이러한 초분광영상을 활용한 수심산정은 보통 모래하상에서 이루어졌으며, 다양한 하상재료에 대한 연구는 미비한 실정이다.
하상재료에 따른 하상조사 방법은 기존의 계측장비에서도 차이가 난다(Fig. 1). RTK-GPS를 활용한 하상조사는 장비의 특성상 단단한 지표의 고도를 측정하게 된다. 따라서 모래일때는 모래, 자갈일때는 자갈의 윗부분, 식생이 있을 때는 식생이 심어진 땅을 지형으로 측량한다. 반면, ADCP는 초음파 신호가 반사되는 성질을 이용하기 때문에 수심 및 유속 등을 계측할 수 있고, 수중에 분포하고 있는 부유사의 농도까지 측정이 가능하다(Son et al., 2021). 따라서 ADCP로 하천을 측량할 때는 RTK-GPS와는 상이하게 식생이 있을 때 식생의 제일 높은 부분을 지형으로 인식하게 된다. 소하천에서는 식생의 영향으로 수심 및 유량 산정에 오차가 될 수 있으며 이를 해결하기 위해 수심관측의 불확도 중 모래, 식생, 자갈 등 현장 조건에 따른 측정 불확도로 구분하여 불확도 인자에 포함해 GUM 표준안(측정 불확도 지침서)에 정의하고 있다. 영상을 활용한 지형측량은 불투과성 물질에 빛이 반사되는 성질을 이용하기 때문에 보통의 영상측량은 토지피복 물질에 대한 측량이 이였으나, 초분광영상을 활용해 수표면 반사와 수중지형 반사를 활용하여 수심을 측량할 수 있게 되었다. 따라서 영상측량 역시 ADCP와 동일하게 식생의 제일 높은 부분을 지형으로 인식하지만, 기수행된 연구들에서는 이러한 하상지형에 따른 수심산정의 비교는 수행되지 않았다.
따라서 본 연구에서는 기존의 초분광영상을 활용한 수심산정 기법을 식생이 있는 하천에 적용하고, 동일지역에서 식생을 제거한 후의 2가지 케이스에 대해서 시공간 초분광영상(Spatio-temporal Hyperspectral Image)과 공간 초분광영상(Spatial Hyperspectral Image)에 모두 적용하고, 실제 수심(하상지형)과 비교하여, 초분광영상의 형태에 따른 수심산정의 활용도를 검토하고, 하상재료에 따른 초분광 수심산정 기법의 적용성을 검토하였다.

2. 연구방법
2.1 실험조건
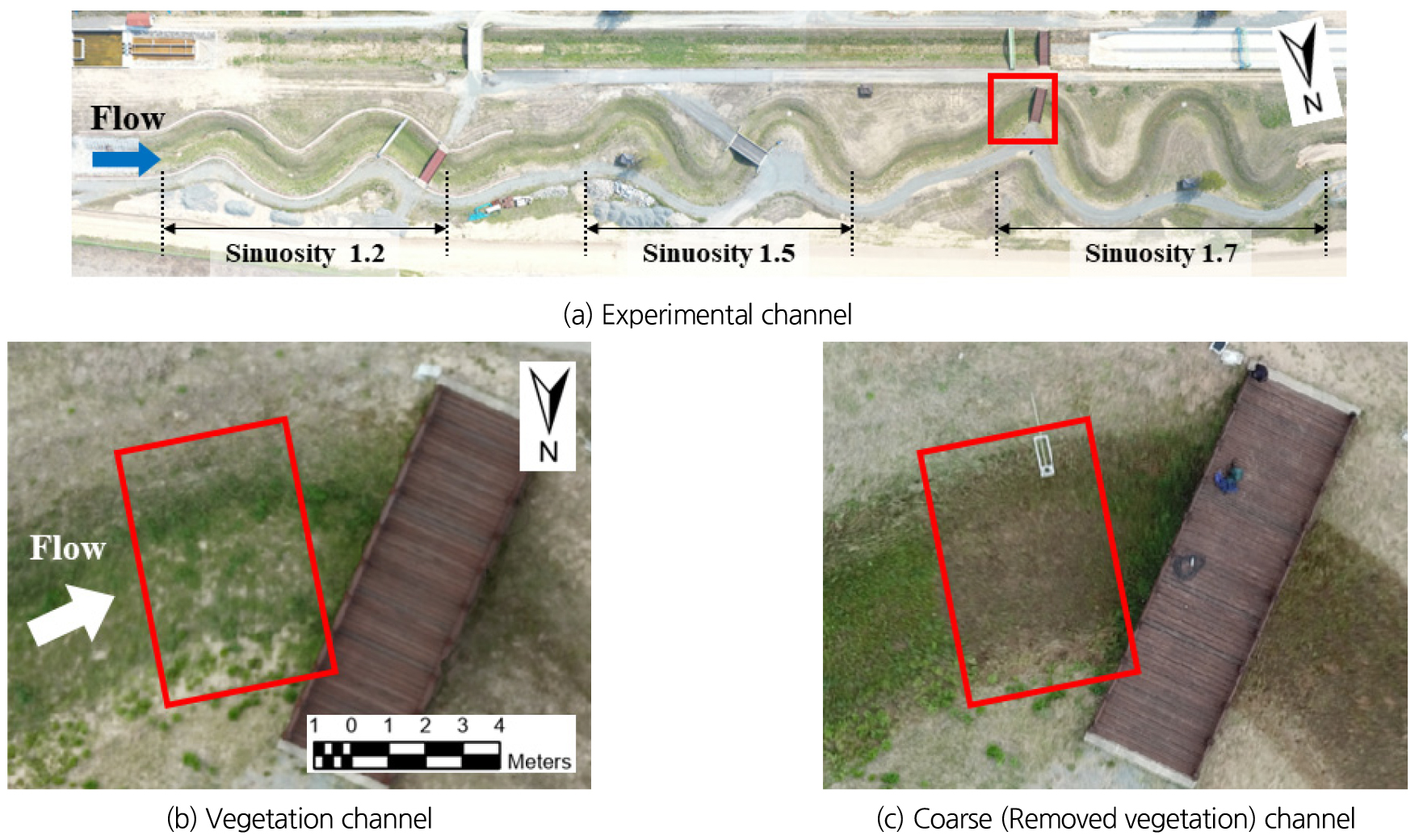
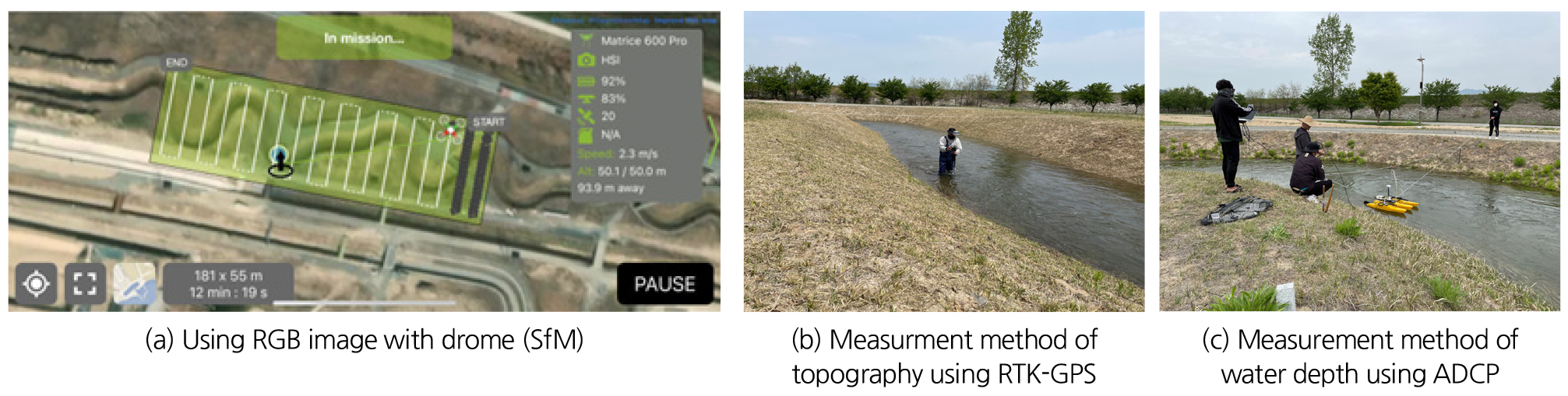
식생 유무에 따른 수심산정기법 적용을 위해서는 하상재료 이외의 수심, 유량 등의 조건들을 통제 가능한 실험장소가 필요했다. 따라서 본 연구에서는 경북 안동에 위치한 하천실험센터의 사행수로를 대상수로로 하였다. 하천실험센터는 하천수리, 하상변동 및 하천생태환경 등의 하천 전반에 관련된 연구를 수행하기 위해 설립되었으며, 최대 10 m3/s 방류가 가능한 3개 대형수로를 보유하고 있다. 그 중 사행수로(Fig. 2(a))는 수로 연장 682 m, 하폭 11 m, 하상경사 0.00125, 사행도 1.2, 1.5, 1.7의 3개 구간으로 구분되어 있다. 실험대상 구간은 사행도 1.0에서 1.7로 진입하는 구간으로 좌안으로 주흐름이 흐르게 된다. 실험이 실시된 2021년 4월 28~29일은 계절적으로 식생이 발달하는 시기로, 수로 전체에 식생이 분포되어 있었다. 본 연구를 위해서는 식생이 있는 조건(Fig. 2(b))에서 RGB 드론 영상을 촬영(Fig. 3(a))한 후 유량을 공급해 초분광영상을 촬영하고, RTK-GPS를 이용해 단면형상 측정(Fig. 3(b))한 후, ADCP를 이용해 실제 수심을 측정(Fig. 3(c))하였다. 이 후 유량공급을 통제하고 실험대상 구간 약 4 × 7 m의 식생을 직접 제거한 후(Fig. 2(c)) RGB 드론 영상을 촬영하고, 다시 동일 유량을 공급해 초분광영상을 촬영, ADCP 수심 측정을 실시하였다.
본 연구에서 활용한 초분광센서는 Corning사의 microHSI 410 SHARK로 물체에서 반사되는 빛의 정보를 400~1,000 nm의 VNIR (Visible and Near-InfraRed) 파장대에서 4 nm 간격으로 수집한다. 센서의 크기는 렌즈 포함 13.6 × 8.7 × 7.0 cm이며, 중량은 0.68 kg으로 초분광장비 중 경량으로 드론에 탑재하여 운용이 용이한 장비이다. 본 초분광장비는 라인스캐닝(Line Scanning) 방식 중 푸시브룸(Push Broom) 방식으로 광학 센서를 선형으로 배치해 프리즘을 통해 들어오는 빛을 공간적으로 기록한다. 본 장비는 GPS 및 IMU가 내장되어 드론 장착시 공간적 경로 추적을 용이하게 하였으며, Kalman 필터로 측정값의 오차를 제거한다. 촬영 각도는 29.5도로 주사선당 682개 화소를 120 Hz의 측정빈도로 수집이 가능하다. 초분광센서를 하천에서 활용하기 위해 DJI사의 Matrice 600 pro 드론을 이용하였으며, 드론과 초분광센서의 장착과 흔들림 보정을 위해 DJI사의 Ronin-mx 짐벌을 이용하였다.
일반적으로 하천원격탐사를 위한 드론조사는 하천의 흐름방향을 따라 모니터링 하거나, 횡방향으로 왕복운행하며 촬영한 영상을 면단위의 영상으로 정합하여 공간을 측정한다. 이때, 영상처리를 위해서는 영상에 좌표를 부여하여 공간정보화 하는 지리참조(Georeferencing)를 포함한 기하보정(Geometric Calibration)과 영상을 결합하는 영상정합(Image Registration), 측정된 초분광 영상의 DN (Digital Number) 혹은 복사휘도(Radiance)값을 반사도(Reflectance) 값으로 변환시키는 방사보정(Radiometric Calibration) 등의 후처리 기술이 필요하다. 본 연구에서는 드론고도 50 m에서 대상구간을 포함하여 드론 경로를 지정해 자동비행을 실시해 공간(Spatial) 초분광영상을 제작해 분석에 이용하였다. 또한, 공간(Spatial) 초분광영상 외에 선형의 공간에서 지속적으로 관측하는 시공간(Spatio-temporal) 초분광영상도 분석에 이용하였다. 시공간 초분광영상은 면단위의 영상을 제작할 필요가 없기 때문에 기하보정과 영상정합의 과정이 불필요하다. 본 연구에서는 실험수로의 하폭 전체를 촬영할 수 있는 25 m 고도에서 시공간 초분광영상을 촬영하였으며, 드론비행이 가능한 약 10분간 촬영하였다.
2.2 수심 분석 방법
기존에 널리 이용되고 있는 초분광영상 형태인 면단위 초분광영상과 본 연구에서 제시한 시공간 초분광영상의 비교를 위하여 두가지 형태의 초분광영상을 모두 수집하였다. 면단위 초분광영상은 50 m 고도에서 촬영하였으며, 드론 고도 50 m에서는 화소당 약 0.04 m의 해상도로 약 26.33 m의 범위를 촬영할 수 있다. 면단위 초분광영상을 제작하기 위하여 횡방향, 종방향 중복도를 80%로 설정한 상태에서 비행경로를 설정해 자동비행을 하였으며, 연속적으로 기록된 초분광영상을 불필요한 범위를 삭제한 후 지리참조 및 기하보정을 수행하여 횡방향 비행으로 획득된 여러 path의 영상을 개별 path 영상으로 제작한 후 모든 path를 하나로 합치는 영상정합을 수행하였다. 시공간 초분광영상은 설정된 측선에서 수로의 하폭 전체를 촬영할 수 있는 25 m 고도에서 촬영하였으며, 공간적으로는 드론 고도 25 m에서는 화소당 약 0.02 m의 해상도로 약 13.16 m 범위를 촬영할 수 있다. 시간적으로는 1초당 120 Hz의 빈도로 분광정보가 기록되며 분석에 이용한 30초 동안 3,600 line이 촬영되었다. 촬영된 시공간 초분광영상은 초단위 영상으로 축소해서 분석에 이용하였다.
면단위 초분광영상과 시공간 초분광 영상 모두 초분광영상의 형태만 변형시킨 것으로, 원본 초분광영상과 동일한 복사휘도의 분광정보로 기록되어있지만, 두 초분광영상의 촬영 시간이 다르기 때문에 광원 조건(태양광의 세기) 역시 상이하다. 이 두 영상을 비교하기 위해 반사천(Calibration Tarp)을 이용하여 방사보정을 수행하였다. 3%, 24%, 56%, 84%의 4단계의 표준 반사도를 갖는 반사천을 이용하여 150개의 파장에 각각 방사보정 관계식을 모두 구축해 영상 전체에 적용하였다.
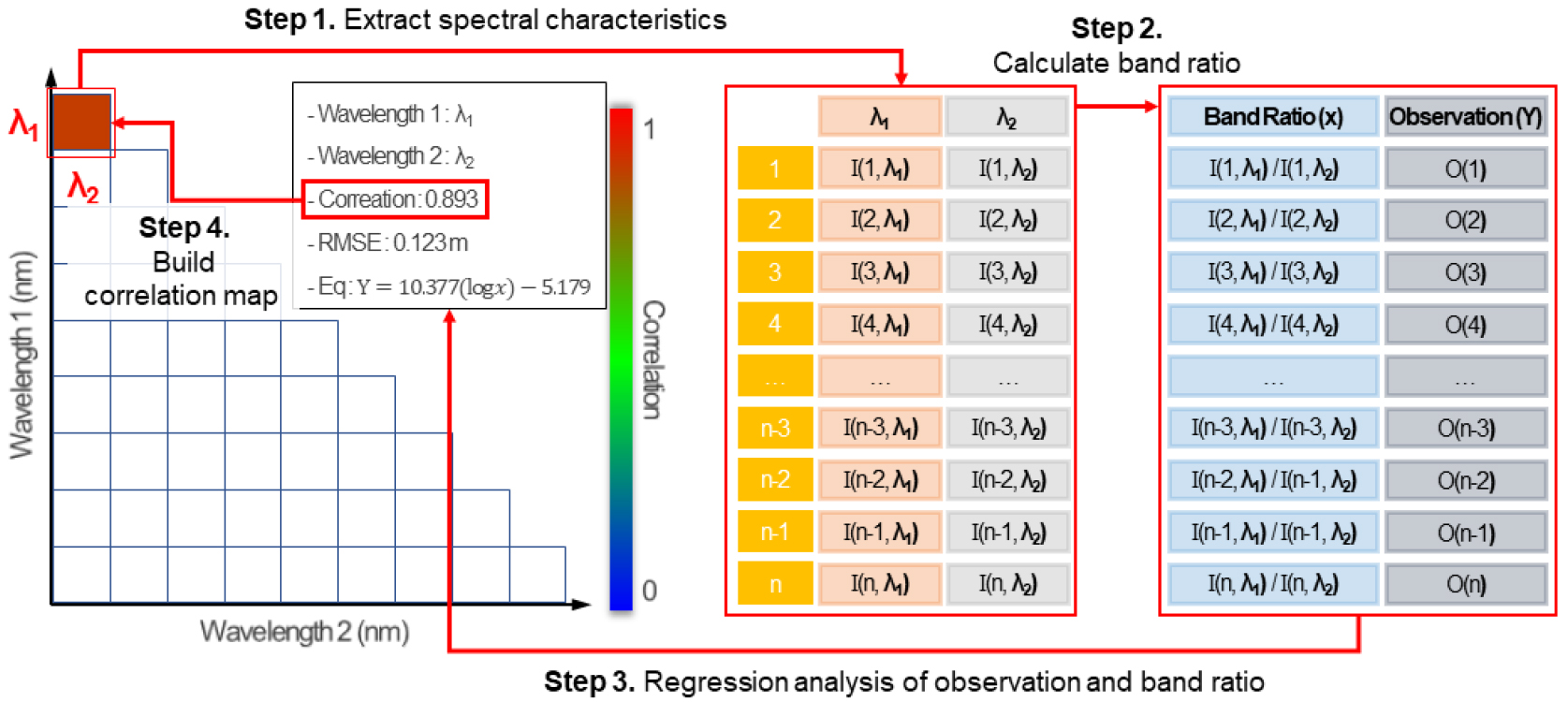
수집된 초분광영상은 최적 밴드 탐색 기법(Optimal Band Ratio Analysis, OBRA)를 이용하여 수심을 산출하였다(Gwon et al., 2022). OBRA는 초분광영상을 구성하는 전체 파장의 수에 대해 1) 두 파장을 선택하는 모든 경우의 수를 고려하여 선택된 두 파장 와 에 대한 분광특성을 추출하고, 2) 분광특성의 정의에 따라 밴드비를 산정, 3) 관측값(수심)과 밴드비(분광특성)의 회귀분석을 통해 상관계수를 산출한다. 4) 파장 와 의 순서쌍의 위치에 상관계수의 크기를 색으로 저장하여 상관계수 맵을 구축한다(Fig. 4). 구축된 상관계수 맵을 통해서 관측값과 상관관계가 높은 두 파장으로 이루어진 순서쌍을 확인할 수 있으며, 가장 높은 상관계수를 보이는 순서쌍을 이용하여 관측값을 도출하는 회귀식을 산정한다.
3. 연구결과
3.1 연구대상지 하상형태 측정 결과
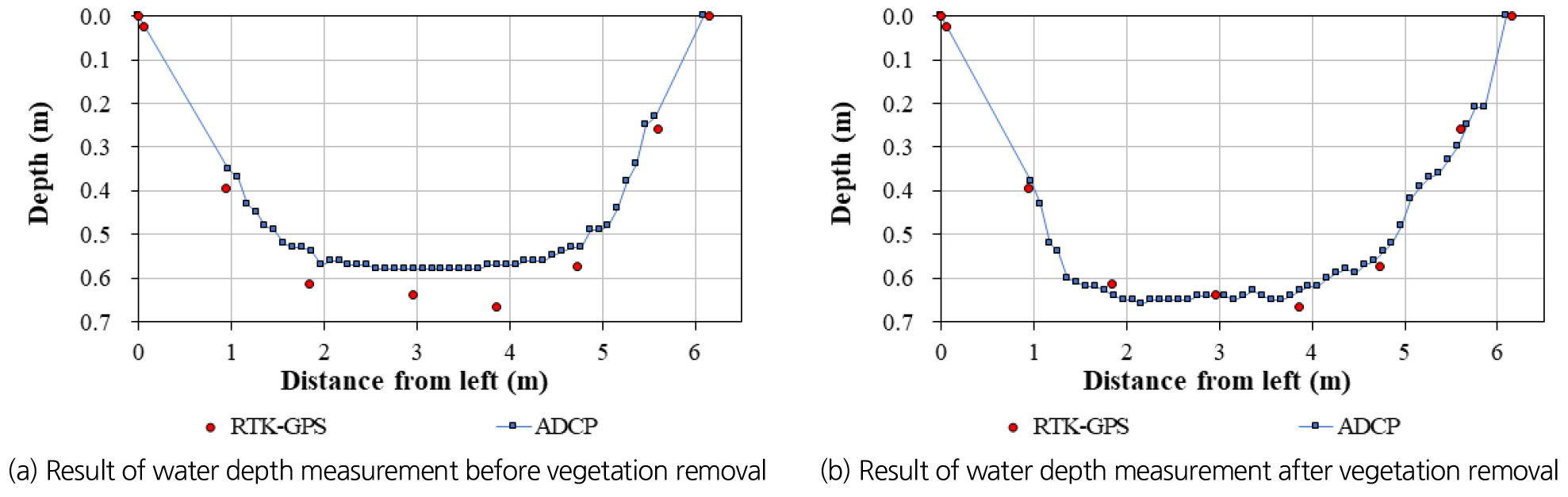
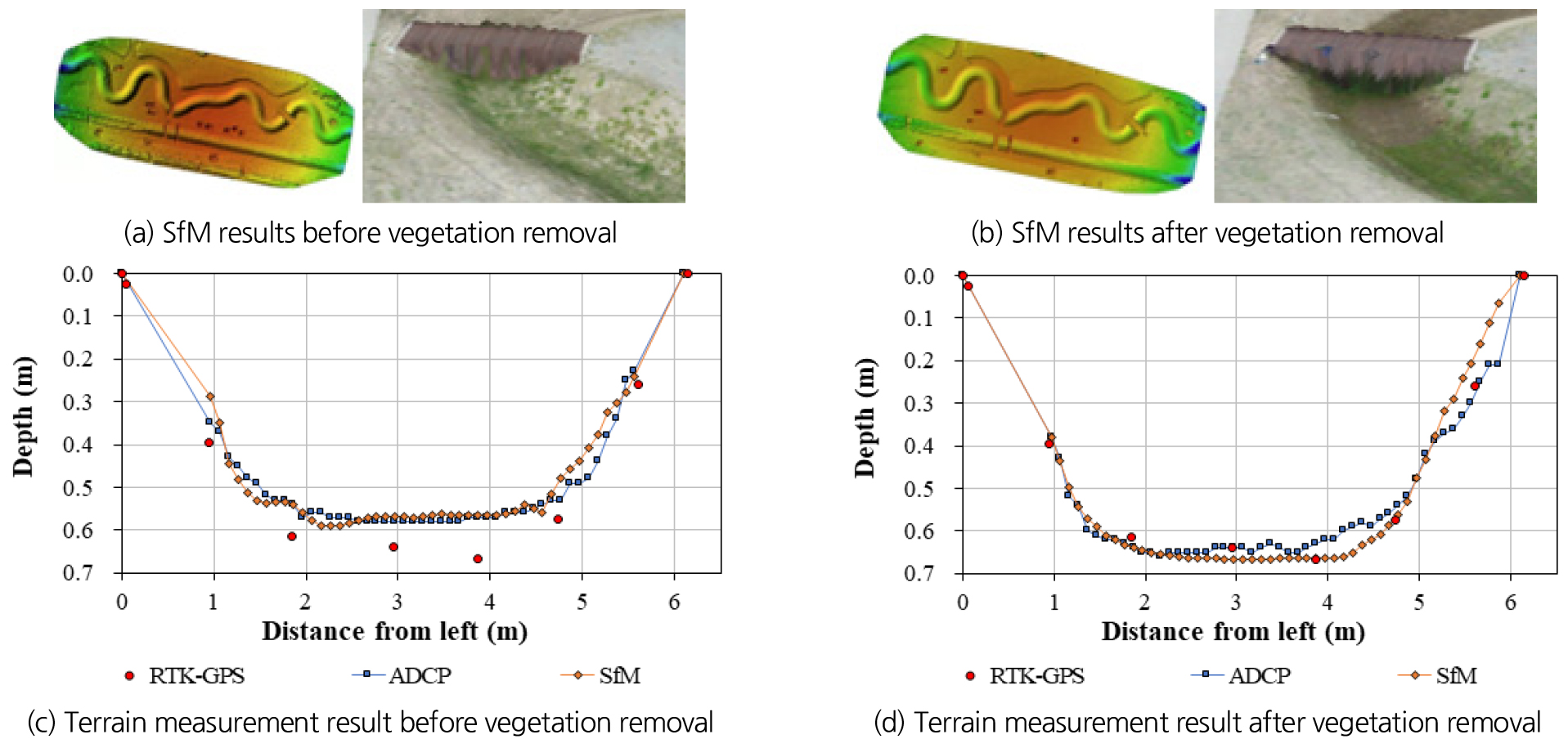
식생제거 전과 후의 수심 변화를 산정하기 위하여 식생제거 전과 후에 유량을 공급한 상태에서 ADCP를 활용해 수심을 측정하여 비교했다. RTK-GPS는 하상재료의 영향과 관계없이 하천 바닥을 측정하기 때문에 식생유무에 관계없이 일정한 하상형태를 보이고 있다(Fig. 5).
3.2 RGB영상(SfM) 하상형태 측정 결과
일반 RGB드론을 이용해 하상형태를 도출하기 위해 식생제거 전과 후 각각 유량을 공급하지 않은 상태에서 영상을 촬영하고 SfM을 수행해 하도지형을 측량해 하상형태를 도출하였다(Fig. 6). 측정치 중 ADCP를 활용해 측정한 수심을 참값으로 간주하고, 각각의 경우에 대해 RMSE (Root Mean Square Error)를 산정하였다. 식생이 있는 조건에서 도출된 SfM으로 지형측량을 한 결과의 RMSE는 0.027 m, 식생을 제거한 조건에서 도출된 SfM으로 지형측량을 한 결과의 RMSE는 0.042 m로 식생을 제거한 조건에서의 오차가 0.015 m 더 발생했다. 하지만 전체적인 하상의 형태가 식생제거 전과 후 모두 ADCP 수심 측정 결과와 유사하게 도출되었다.
3.3 초분광영상 수심 산정 결과
3.3.1 식생제거 전 수심 산정
식생제거 전과 후에 각각 촬영된 Spatio-Temporal Hyperspectral Image (STHSI)와 Spatial Hyperspectral Image (SHSI)를 이용하여 OBRA를 수행해 수심을 산출하였다. STHSI의 OBRA 결과(Fig. 7(a)) 최적 밴드구간은 500~600 nm 구간과 700~800 nm 구간의 밴드비에서 R2값이 높게 나타났으며, R2값이 가장 높은 최적 밴드는 555.85 nm와 706.49 nm가 도출되었고, 이때 R2값은 0.82로 도출되었으며, 수심산정식은 Eq. (1)과 같다.
측정 단면의 최종 수심분포는 Fig. 7(b)로 ADCP 측정 수심과 비교하면 다소 차이가 있어보이지만, 이는 수중 식생의 움직임과 관련이 있을것으로 판단된다. SHSI의 OBRA 결과(Fig. 7(c)) 최적 밴드구간은 520~580 nm 구간과 700~750 nm 구간의 밴드비에서 R2값이 높게 나타났으며, R2값이 가장 높은 최적 밴드는 551.89 nm와 714.42 nm 가 도출되었고, 이때 R2값은 0.35로 도출되었으며, 수심산정식은 Eq. (2)와 같다.
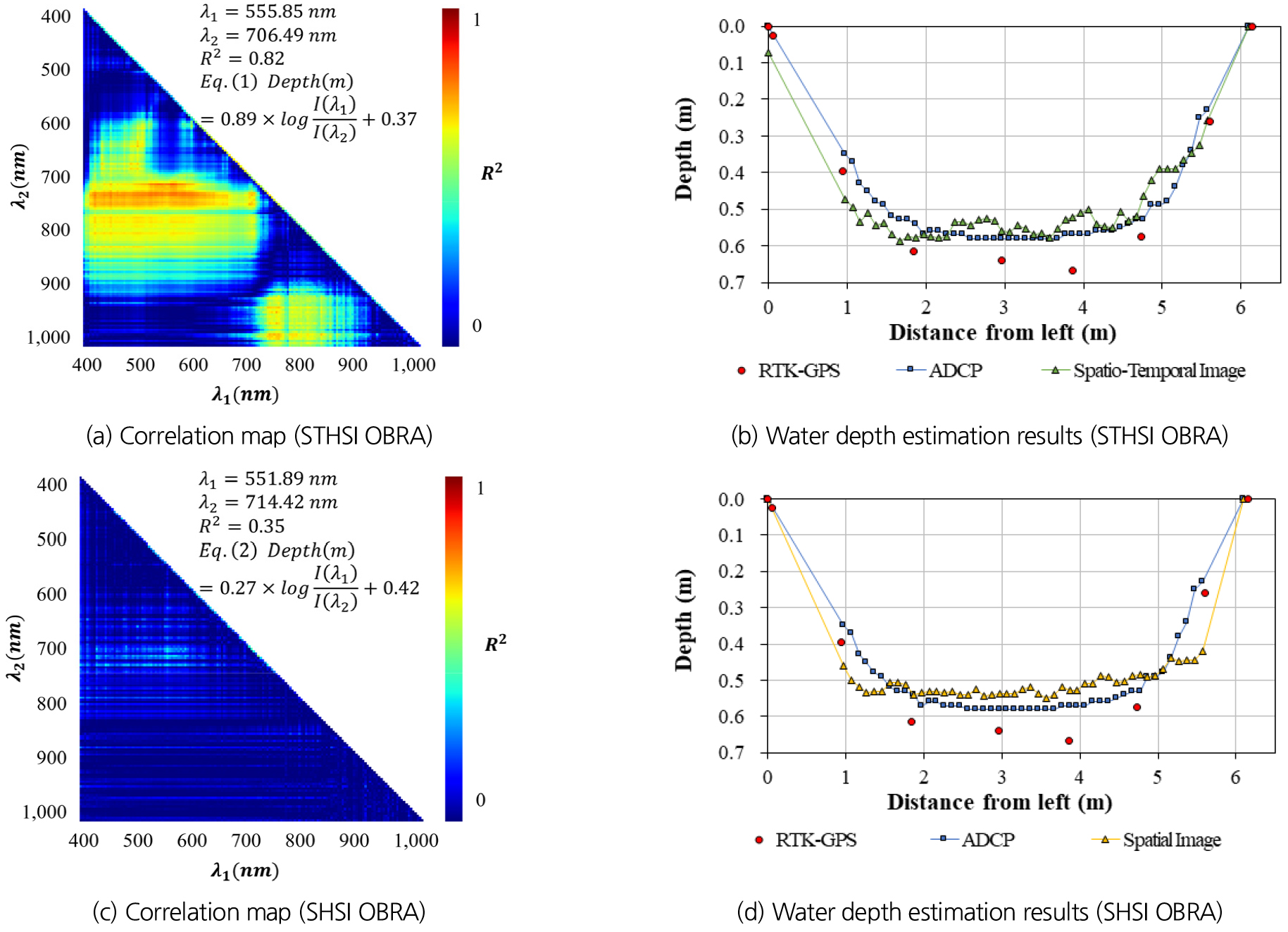
측정 단면의 최종 수심분포는 Fig. 7(d)로 ADCP 측정 수심과 비교하면, 매우 유사한 형태의 수심이 산출되었지만, STHSI 수심분포의 경우와 마찬가지로 수중 식생의 영향으로 다소 차이를 보였다.
3.3.2 식생제거 후 수심 산정
식생제거 전의 수심측정(ADCP 수심측정, 초분광 수심측정)을 완료한 후에 유량공급을 통제하고 실험대상 구간 약 4 × 7 m의 식생을 직접 제거하였다. 식생제거 전과 후에 동일한 하상형태를 유지하기 위해서 식생제거 시에는 식생을 뿌리채 뽑지 않고 짧게 절단하여 대상 단면의 하상형태를 최대한 유지하였다. STHSI의 OBRA 결과(Fig. 8(a)) 최적 밴드구간은 500~600 nm 구간과 700~800 nm 구간의 밴드비에서 R2값이 높게 나타났으며, R2값이 가장 높은 최적 밴드는 567.74 nm와 694.6 nm가 도출되었고, 이때 R2값은 0.94로 도출되었으며, 수심산정식은 Eq. (3)과 같다.
측정 단면의 최종 수심분포는 Fig. 8(b)로 ADCP 측정 수심과 매우 유사한 형태의 하상이 도출되었고, RTK-GPS로 측정한 하상형태와도 매우 유사하게 도출되었다. SHSI의 OBRA 결과(Fig. 8(c)) 최적 밴드구간은 500~600 nm 구간과 700~800 nm 구간의 밴드비에서 R2값이 높게 나타났으며, R2값이 가장 높은 최적 밴드는 563.78 nm와 714.42 nm 가 도출되었고, 이때 R2값은 0.88로 도출되었으며, 수심산정식은 Eq. (4)와 같다.
측정 단면의 최종 수심분포는 Fig. 8(d)로 ADCP 측정 수심과 RTK-GPS로 측정한 하상단면과 비교했을 때, 매우 유사한 형태의 수심이 산출되었다.
식생제거 전과 후의 영상 취득 형태별 최적밴드 도출 결과를 살펴보면(Table 1), 수심을 도출한 네개의 케이스 모두 550 nm와 700 nm 부근의 2개의 파장으로 조합된 밴드비를 이용한 경우에 가장 높은 상관계수 값을 가졌으며, 식생제거 후의 밴드비에서 R2값이 높았으며, RMSE역시 식생제거 후의 경우에 0.0322 m (STHSI 수심분포)와 0.0360 m (SHSI 수심분포)로, 식생제거 전의 0.0522 m (STHSI 수심분포)와 0.0637 m (SHSI 수심분포)보다 적은 오차를 보여 식생의 영향이 없을 때 더 정확도 높은 수심분포를 산출할 수 있다는 것을 확인하였다.
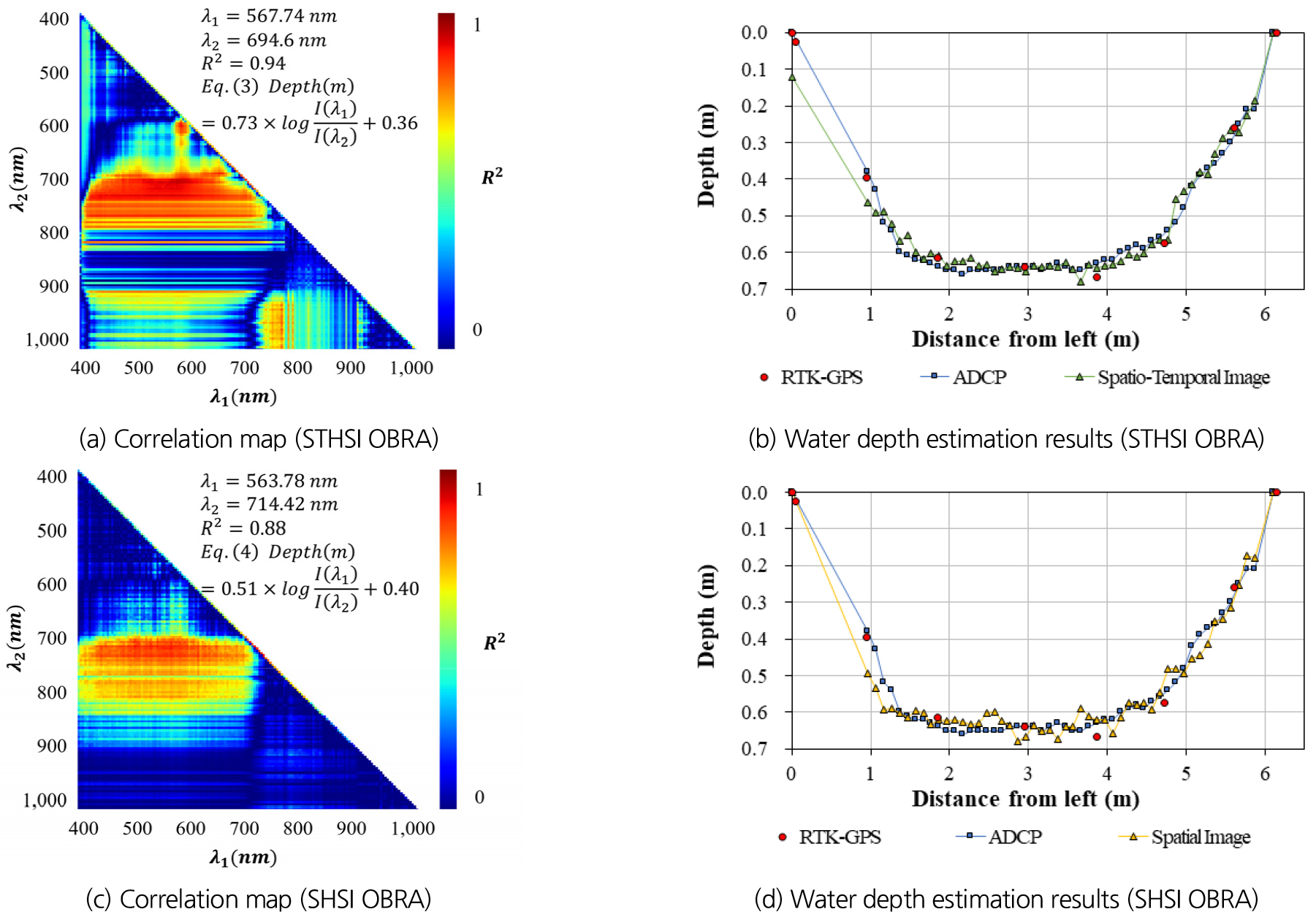
Table 1.
OBRA results according to vegetation status and image type
3.4 수심 산정 결과 비교
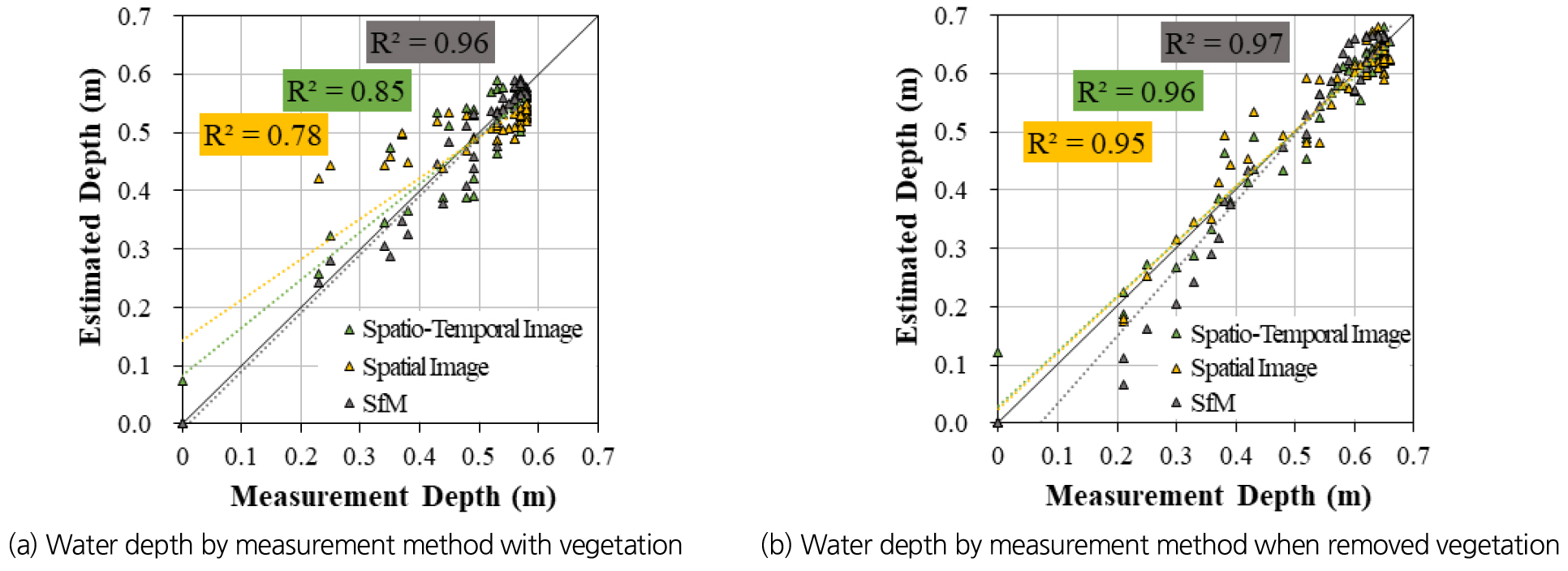
영상의 유형별 수심산정 결과를 비교하면(Fig. 9, Table 2) RGB영상을 이용한 SfM 결과가 식생이 있을 때, 없을때 모두 가장 높은 정확도를 보였다. SfM 결과가 정확도가 높은 것은 RGB영상의 경우 유량공급을 하지 않고, 물의 영향을 전혀 받지 않은 상태에서 원래상태 그대로의 지형을 측정했기 때문이다. 일반적으로 하천에서 수행하는 드론 RGB영상의 모니터링은 투과성이 있는 수체의 경우 영상정합 과정에서 정합점을 찾기 어렵기 때문에 수체를 제외한 불투과성 토지 피복을 대상으로 정합이 수행되어 영상이 만들어진다. 이것이 RGB 영상을 이용한 하천모니터링의 한계이다. 초분광영상의 수심산정 결과를 보면, 하상재료별로는 식생이 있을 때 보다 식생이 없을 때 수심산정 결과가 더 높은 정확도를 보였으며, 영상의 유형별로는 기존에 주로 이용되던 SHSI (공간(Spatial) 초분광영상)보다 STHSI (시공간(Spatio-temporal) 초분광영상)의 수심산정 정확도가 더 높은 것으로 나타났다. 하지만 식생이 없는 조건에서 SfM, 시공간 초분광영상, 공간 초분광영상의 R2는 각각 0.01 차이, RMSE는 1 cm 미만의 차이를 보여 수심산정 결과는 우수했다. 식생이 있는 조건에서 SHSI와 STHSI의 R2 차이가 식생이 없는 조건에서보다 크게 발생한 이유는 영상 촬영 방식과 식생으로 인해 발생한 오차로 사료된다. SHSI는 드론 비행체의 움직임, 유량공급으로 인한 수체의 이동과 식생의 움직임 이 세가지가 모두 수심측정 정확도에 영향을 미치며, 특히 드론과 수체의 움직임이 동시에 발생하기 때문에 초분광카메라와 식생의 상대속도로 인한 오차가 더욱 상승했을 것으로 판단된다. STHIS의 경우 드론이 고정된 상태에서 영상을 촬영하였기 때문에 비행체의 움직임으로 인한 오차를 최소화하였고, 120 Hz로 촬영된 영상(1초에 120번 촬영됨)을 1초 간격으로 평균하였기 때문에, 수체의 이동과 식생의 움직임으로 인한 오차 역시 최소화된 것으로 판단된다.
4. 결론 및 향후연구
본 연구에서는 드론 초분광 플랫폼을 활용한 수심조사 기술을 고도화하기 위해 기존의 수심조사 기술을 하상재료별, 초분광영상의 형태별로 수행해 그 적용성을 평가해보았다. 연구결과로부터 도출된 결론을 요약하면 다음과 같다.
1) 초분광영상을 이용한 총 4가지 케이스의 수심분석을 수행한 결과, 수심과 관련이 있는 파장은 550 nm와 700 nm 부근의 2개로 도출되었다.
2) 하상재료에 따른 초분광영상을 활용한 수심조사 수행 결과, 모래하천에서는 모래를 바닥으로 한 수심, 식생이 있을때는 식생의 꼭대기를 바닥으로 인식한 수심이 산정되었다.
3) 초분광영상의 형태별 분석을 실시한 결과, 시공간(Spatio-temporal) 초분광영상 분석결과가 기존 활용되던 공간(Spatial) 초분광영상 분석결과 보다 수심정확도가 높게 나타났으며, 공간 초분광영상 제작의 복잡한 과정없이 유의한 분석결과를 도출할 수 있었다.
초분광영상의 형태별 수심산정의 결과는 공간 초분광영상과 시공간 초분광영상에서 모두 수심산정 정확도가 높게 나타나 추후 시공간 초분광영상을 활용할 경우, 즉각적인 하상의 변화를 파악할 수 있을것으로 기대된다. 또한 식생하상에서의 수심분석 결과를 이용한 수중식생의 높이를 산정하는 추가분석이 필요하며, 이를 활용해 다양한 하상재료에서의 초분광 수심산정 연구를 수행할 예정이다.
