

1. 서 론
2. 방법론
2.1 Random Forest
2.2 Geographically Weighted Regression
3. 모델 구축
3.1 연구 대상 지역
3.2 자료 수집 및 전처리
3.3 모델 평가지표
4. 결과 및 고찰
4.1 RF 수심 추정 결과
4.2 GWR 수심 추정 결과
4.3 광학적 이질성
5. 결 론
1. 서 론
호소는 느린 유속과 깊은 수심으로 인해 부영양화와 조류 대발생과 같은 수질 문제가 빈번히 발생하며, 이러한 현상은 호소 내 미세 흐름 구조와 체류시간에 큰 영향을 받는다. 체류시간의 정확한 예측을 위해서는 정밀한 수리모델링이 요구되고, 이는 고해상도 지형자료 확보를 전제로 한다(Aleynik et al., 2016; Kim et al., 2018; Li et al., 2018). 그러나 ADCP, RTK-GPS 등을 이용한 전통적인 지형 계측 방식은 넓은 수역을 고해상도로 조사하기 어렵고, 시간·비용 면에서도 효율성이 낮다. 이러한 직접 접촉식(in-situ) 측량 방법의 한계점을 극복하기 위해 최근에는 항공·위성 기반 원격탐사 자료를 활용한 수심 추정(satellite-derived bathymetry, SDB)이 활발히 연구되고 있다.
원격탐사 기반 수심 추정은 수체 상부로부터 관측되는 분광 신호와 실제 수심 간의 관계를 통해 이루어지며, 다중분광·고해상도 이미지의 확대로 수심 예측의 적용 범위가 넓어지고 있다. 그러나 자연계 수체에서는 저질(bottom substrate) 구성물질의 특성, 부유물질 농도 변화, 조류 번식 등으로 인해 분광 신호가 공간적으로 변화하는 광학적 이질성(optical heterogeneity)이 나타난다(Legleiter et al., 2009; Kim et al., 2019; Ouma et al., 2020; Kwon et al., 2024). 이는 수심-반사도 관계의 공간적 비정상성을 초래하며, 모든 영역에 대해 단일 수심-반사도 관계식을 이용하는 전역적(global) 모델의 정확도를 크게 저하시킬 수 있다(Kim et al., 2019).
이러한 한계를 보완하기 위한 대안으로 Geographically Weighted Regression (GWR)이 연안지역의 SDB 연구에 활용된 바 있다(Su et al., 2013; Monteys et al., 2015; Vinayaraj et al., 2016). GWR은 각 위치의 공간적 특성에 따라 회귀계수가 달라지는 지역 기반 회귀모델(local regression model)로서, 분광 신호의 공간적 이질성을 직접적으로 모형화함으로써 전역 모델이 반영하지 못하는 독립변수-종속변수 관계의 공간적 변동성을 효과적으로 처리할 수 있다(Brunsdon et al., 1996). 과거 연구들은 공통적으로 다양한 저질 구성물질과 수중식생이 공간적으로 비균질하게 분포하는 천수(shallow water) 환경에서 GWR이 전역 모델 대비 정확한 예측 성능을 보임을 보고한 바 있으며, 이러한 결과는 바닥반사(bottom reflectance) 영향으로 인해 수심-반사도 관계가 공간적으로 유의미하게 변화할 수 있음을 시사한다. 그러나 기존 연구의 대부분이 연안의 광학적 천수(optically shallow waters) 환경에서 수행됨에 따라 탁도, 부유물질 농도, 바닥 반사 특성, 수중식생 등 광학적 조건이 상이한 호소 환경에서의 적용성은 충분히 검증되지 않았다.
한편, 최근에는 탁도나 바닥반사 영향이 큰 수체를 대상으로 다양한 기계학습(machine learning) 기법을 활용한 SDB 연구가 활발히 이루어지고 있다(Manessa et al., 2016; Sagawa et al., 2019; Eugenio et al., 2021; Zhou et al., 2023; Kwon et al., 2024). 이러한 접근법은 위성 또는 항공영상으로부터 획득한 분광 신호와 실제 수심 간의 복잡하고 비선형적인 관계를 학습함으로써, 기존의 다중선형회귀(multilinear regression) 방법에 비해 우수한 설명력과 예측 정확도를 보이는 것으로 보고되고 있다. 특히 Random Forest (RF), Support Vector Regression (SVR), Gradient Boosting Machines (GBM) 등 비모수적(non-parametric) 모델은 입력 변수 간 상호작용과 비선형 구조를 효과적으로 포착하여 얕은 수심과 높은 탁도로 인해 수체의 광학적 특성이 공간적으로 크게 변화하는 환경에서도 상대적으로 안정적인 예측 성능을 제공한다는 장점이 있다(Kwon et al., 2024). 그럼에도 불구하고, 광학적 이질성이 존재하는 호소 환경을 대상으로 기계학습 기반 전역 모델과 GWR 지역 모델을 직접 비교·평가한 연구는 매우 제한적이다.
본 연구에서는 전역적 비선형 모델과 지역적 공간 가변 회귀모델이 갖는 구조적 차이가 호소의 수심 예측 성능에 어떠한 영향을 미치는지 규명하고자 한다. 이를 위해 Sentinel-2 다중분광 영상을 이용하여 RF 및 GWR 모델을 의암호에 구축·적용하였으며, LiDAR 기반 수심 자료를 참조값으로 활용하여 두 모델의 예측 성능을 비교·평가하였다.
2. 방법론
2.1 Random Forest
RF는 다수의 결정트리(decision trees)를 조합하여 예측을 수행하는 배깅(bagging) 기반 비모수적 회귀 모델로서(Breiman, 2001), SDB 연구에서 가장 널리 활용되는 기계학습 기법 중 하나이다(Manessa et al., 2016; Eugenio et al., 2021; Gwon et al., 2023; Kwon et al., 2024). RF는 부트스트랩(bootstrap) 표본으로 구성된 여러 학습 데이터셋을 이용해 개별 회귀 트리를 생성하고, 이들 트리의 예측값을 평균함으로써 최종 수심을 산정한다. 이러한 앙상블 구조는 단일 결정트리가 가지는 과적합(over-fitting) 문제를 효과적으로 완화하며, 입력 변수 간 비선형적 관계와 상호작용을 안정적으로 포착할 수 있다는 장점을 가진다.
최근 연구들에서 RF가 Artificial Neural Network (ANN), SVR, GBM, eXtreme Gradient Boosting (XGBoost) 등 대안적 기계학습 알고리즘과 비교했을 때 앙상블 기반 학습 구조에 기인한 높은 일반화 성능을 지닌 것으로 보고된 바 있다(Kwon et al., 2022). 특히 얕은 수심과 높은 탁도로 인해 광학적 이질성이 크게 나타나 수심-반사도 관계가 공간적으로 복잡하게 변동하는 수체에서도, RF는 높은 구조적 안정성과 예측 정확도가 확보 가능한 것으로 알려져 있다(Gwon et al., 2023; Kwon et al., 2024).
본 연구에서는 Sentinel-2 다중분광 반사도와 LiDAR 기반 수심 자료를 이용하여 RF 회귀모델을 구축하였다. RF 구현에는 Python의 scikit-learn 라이브러리에 포함된 RandomForestRegressor를 사용하였다(Pedregosa et al., 2011). 주요 하이퍼파라미터로는 트리 개수(n_estimators), 최대 트리 깊이(max_depth), 노드 분할 시 고려되는 변수 개수(max_features) 등을 포함하며, 최적의 조합은 RF 학습 과정에서 부트스트랩 샘플링으로 생성되는 out-of-bag (OOB) 자료를 이용한 내부 검증 결과를 기반으로 설정하였다.
2.2 Geographically Weighted Regression
GWR은 공간적 비정상성(spatial non-stationarity)을 고려하여 각 위치에서 서로 다른 회귀계수를 추정하는 지역 기반 회귀 기법이다(Brunsdon et al., 1996). 전역 회귀모델이 모든 관측점에 대해 단일 계수를 가정하는 데 반해, GWR은 관측 위치별로 회귀계수를 할당함으로써 독립변수-종속변수 관계의 공간적 변동성을 모델 내에 직접 반영한다. 이러한 특징으로 인해 GWR은 저질 특성, 부유물질 농도, 수중식생 분포, 바닥반사 강도 등 광학적 조건이 불균질하게 변화하는 수체에서 SDB의 정확도 향상에 유용한 접근법으로 평가되며(Kim et al., 2019), GWR의 지배방정식은 다음과 같다.
여기서, 는 위치 에서의 예측 수심, 는 입력 분광 자료, 는 지역 회귀계수(regression coefficient), 는 절편(intercept), 는 관측지점과 동일한 회귀지점을 나타낸다. 대상 영역 내 회귀계수들은 아래와 같이 가중최소제곱법(weighted least squares)을 이용해 추정된다.
여기서, 는 의 벡터, 는 의 행렬, 는 의 지리적 가중치를 구성하는 대각행렬, 는 로 구성된 단일 열 벡터이다. Eq. (2)에서 는 커널 함수에 의해 산정된 가중치 를 포함하는 가중 방식을 의미하며, 본 연구에서는 다음의 bi-square kernel 함수를 사용하였다.
여기서, 는 커널 대역폭(bandwidth), 는 내 를 제외한 나머지 관측지점, 는 와 의 거리이다. 커널 대역폭은 회귀계수의 공간적 변동성을 결정하는 핵심 요소로써 corrected Akaike Information Criterion (AICc)에 의해 결정되며, bi-square kernel 함수를 통해 가까운 관측값일수록 높은 가중치를 갖도록 모델이 설계된다.
이와 같은 공간 가중 회귀 구조를 통해 GWR은 대상 영역 내 특정 지역의 광학적 특성이 주변 지역과 다를 때 그 차이를 회귀계수에 반영함으로써, 전역 회귀모델이 포착하지 못하는 지역적 수심-반사도 관계를 효과적으로 해석할 수 있다. 본 연구에서는 Sentinel-2 다분광 반사도를 설명 변수로 사용하여 GWR 모델을 구축하고, 공간적으로 변화하는 회귀계수를 통해 의암호의 광학적 이질성을 정량적으로 평가하고자 한다.
GWR은 학습 자료에 포함된 관측 지점들을 이용하여 공간 가중 회귀 구조 하에서 위치별 회귀계수와 절편을 추정한다. 이러한 특성으로 인해, 검증 단계에서는 각 검증 지점에서 직접 회귀계수를 재추정하기보다, 학습 단계에서 추정된 위치별 회귀계수를 검증 지점의 공간적 위치로 보간하여 적용함으로써 해당 지점의 수심을 예측하게 된다. 본 연구에서는 학습 단계에서 산정된 GWR 회귀계수와 절편을 Gaussian kernel 기반의 공간 가중 평균 보간법을 적용하여 검증 자료 위치로 보간하였으며, 이를 통해 의암호 내에서 공간적으로 변화하는 광학적 이질성이 수심 추정 결과에 반영되도록 하였다. Gaussian kernel 기반 공간 가중 평균 보간법은 아래 식으로 정의된 Gaussian 커널 함수를 이용하여 공간 가중치를 산정한다.
여기서, 는 학습 지점 위치, 는 검증 지점 위치, 는 에서 의 정규화된 공간 가중치, 는 와 의 거리, 은 학습 지점의 총 개수이다. 검증 지점의 회귀계수와 절편은 학습 단계에서 추정된 GWR 계수들을 대상으로, Eq. (4)에서 정의된 공간 가중치를 적용한 가중 평균을 통해 산정된다.
3. 모델 구축
3.1 연구 대상 지역
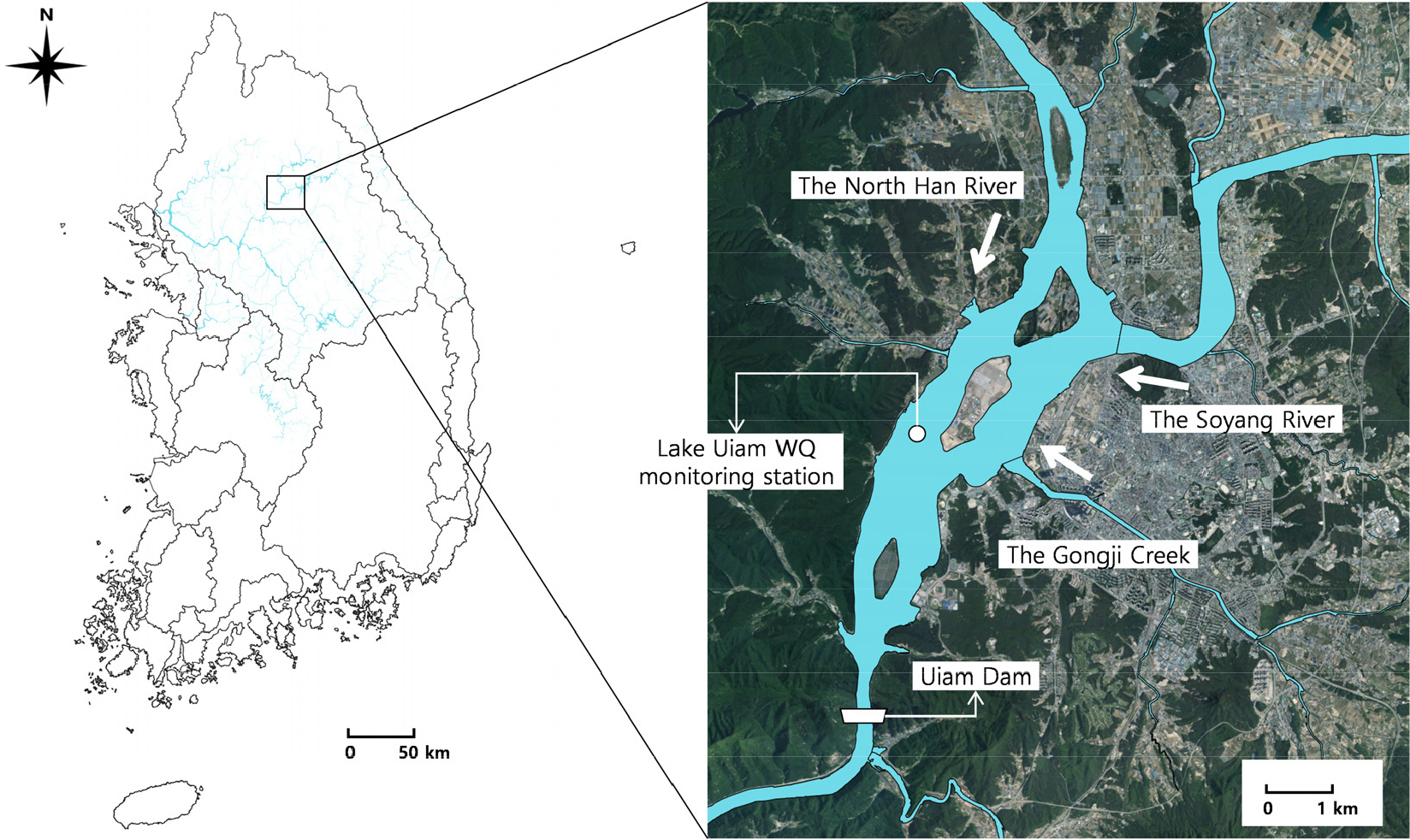
본 연구의 대상 지역인 의암호는 강원도 춘천시에 위치한 인공호로서, 북한강 본류와 소양강 합류부 하류 약 10 km 지점에 위치한 의암댐에 의해 형성된 담수호이다(Fig. 1). 평균 하폭은 약 0.5 ~ 1 km이며, 협곡형 하폭이 유지되는 구간과 곡류부·직선부가 교차하는 구간이 혼재하여 공간적으로 다양한 흐름 특성을 지닌다. 의암호의 평균 수심은 약 5 m 수준이며, 하상 기복이 커서 천수역과 급심 구간이 인접해 나타나는 등 수심 변화가 매우 불규칙한 특성을 지닌다.
의암호 상류에는 춘천댐과 소양강댐이 각각 북한강과 소양강에 위치하고 있으며, 두 댐의 운영은 의암호의 수리·수질 환경에 직접적인 영향을 미친다(Lee and Baek, 2024). 소양강댐의 계절적 방류는 북한강 수량 변동을 크게 조절하며, 춘천댐의 발전방류는 단기적인 유량 변화와 난류 강도 변화를 유발하여 상류부 유속, 부유물질 농도, 수온 구조 등에 영향을 준다. 이러한 상류 댐 운영 특성은 의암호로 유입되는 흐름의 시간적 변동성을 증가시키고, 탁도·부유물질·조류 농도의 시·공간적 이질성을 구조적으로 강화한다(Im et al., 2023; Lee and Baek, 2024). 또한 앞서 언급한 바와 같이 의암호는 천수역과 심수(deep water)역이 혼재하는 복잡한 지형 특성을 지니고 있어, 바닥반사 영향이 공간적으로 상이하게 나타날 가능성이 크다. 이 같은 의암호 고유의 수리·수질·지형 특성은 수체의 분광 특성에 직접적인 영향을 미치며, 의암호 전역에서 광학적 이질성을 유발하는 잠재적 요인으로 작용할 수 있다.
3.2 자료 수집 및 전처리
본 연구에서는 의암호 수심 추정을 위해 10 m 공간해상도로 구축된 LiDAR 하상고 자료와 Sentinel-2 위성영상을 활용하였다. 위성자료의 경우, 의암호에서 수온 상승과 비점오염원 유입으로 인해 조류 농도가 상대적으로 높게 나타나는 8 ~ 9월 기간 중 구름 비율 20% 미만인 영상을 우선적으로 탐색하였다. 이는 구름이 영상에 다량 포함될 경우 전체 반사도 수준을 인위적으로 상승시켜 수체의 고유한 분광 특성이 약화되고, 결과적으로 수심 추정 정확도가 저하될 수 있기 때문이다. 이 같은 조건 아래, 2025년 9월 3일 촬영된 Sentinel-2B Level-1C (L1C) 영상이 최종적으로 선택되었다. 영상 촬영 시점에 의암호 자동수질측정망(Fig. 1)에서 chlorophyll-a (Chl-a) 농도가 22.0 ~ 32.1 mg/m3 범위로 관측되었다. 의암호는 장마철 강우 사상 이후 오염부하량이 높은 공지천 등 유입 하천을 통한 강우유출로 영양염류 농도가 상승하며, 이에 따른 수질 변화와 조류 번식이 빈번하게 관찰되는 것으로 보고된 바 있다(Hwang et al., 2017; Im et al., 2023). 이에 따라 본 연구에서 활용한 영상은 이러한 강우 이후 수체 조건을 반영한 시기의 자료로 해석될 수 있다.
Sentinel-2 L1C 영상은 기하보정 및 정사보정이 완료된 후 대기권 상단 반사도(Top-of-Atmosphere reflectance, TOA) 형태로 스케일링된 표준 제품이지만, 여전히 대기 산란 및 흡수의 영향을 포함하고 있다. 따라서 본 연구에서는 ACOLITE의 dark spectrum fitting (DSF) 알고리즘을 적용하여 L1C 영상의 TOA 반사도를 수면 반사도(Level-2R, L2R)로 변환하였다. DSF 알고리즘은 영상 내에서 대기 산란 성분만을 주로 반영하는 암색(dark) 픽셀을 자동으로 탐지한 뒤 이를 이용하여 에어로졸 산란량을 추정·제거하는 영상 기반 대기보정 기법으로, 수체와 같이 낮은 반사도를 갖는 영역에서 높은 보정 안정성을 제공한다(Vanhellemont and Ruddick, 2016).
Sentinel-2 위성은 443 ~ 865 nm 구간의 Near-infrared (NIR) 및 Red-edge를 포함한 총 9개 밴드와, 1610 nm와 2190 nm의 두 개 Short-Wave Infrared (SWIR) 밴드로 구성된 다분광 영상을 제공한다. 그러나 Sentinel-2 영상은 분광 밴드에 따라 서로 다른 공간 해상도로 제공되기 때문에, 밴드 간 분광 특성을 결합하여 수심 추정 모델을 구축하기 위해서는 공간적 일관성이 요구된다. 이에 대기보정 과정에서 모든 반사도 밴드를 공간 재표본화(resampling)하여 10 m 해상도로 통일하였다. 대기보정이 완료된 L2R 영상에서는 SWIR 밴드(1610 nm) 반사도 0.021을 임계값으로 적용하여 육상 및 구름 영역을 마스킹 처리하였다(Aurin et al., 2013). SWIR 영역에서 수체는 매우 낮은 반사도를 보이는 반면, 구름과 지표면은 상대적으로 높은 반사도를 나타내기 때문에 이러한 임계 기반 마스킹은 수체 영역의 분리와 잔여 대기·지표 영향 제거에 효과적이다. SWIR 밴드 반사도가 임계값 이상인 픽셀은 수체의 광학 특성과 무관하게 구름 영향으로 반사도가 과대하게 나타나는 영역으로, 이를 포함할 경우 SDB 모델의 수심-반사도 관계를 왜곡시킬 수 있다. 이에 따라 해당 픽셀은 마스킹 처리하여 모델 구축 자료에서 제외하였다.
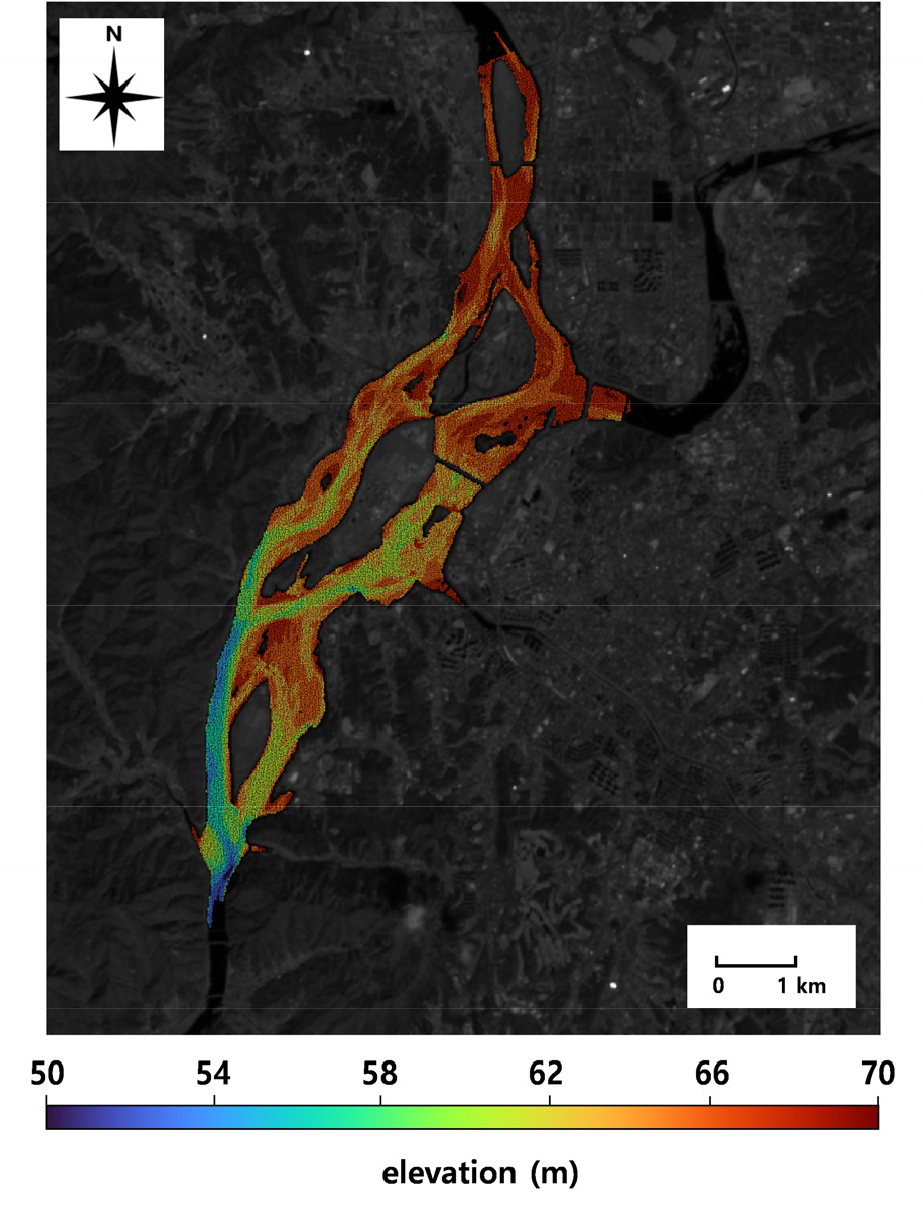
LiDAR 하상고 자료는 Fig. 2에 나타낸 바와 같이 Sentinel-2 L2R 영상의 투영체계(WGS84 경위도 좌표계, EPSG: 4326)로 변환한 후, 각 LiDAR 관측지점과 가장 인접한 L2R 픽셀의 반사도 값을 결합하여 모델의 입·출력 자료를 구축하였다. 자료의 공간적 매칭은 동일 좌표계에서의 최근접 거리 탐색에 기반한 것으로, Sentinel-2 L2R 영상의 모든 픽셀 좌표를 KD Tree (k-dimensional tree) 구조로 구성한 뒤 각 LiDAR 관측지점과 가장 가까운 픽셀의 반사도 값을 추출하였다. KDTree 기반 최근접 매칭은 k차원 공간을 이진 분할하여 탐색 범위를 단계적으로 축소하는 방식으로, 대규모 격자 영상에서도 매우 효율적으로 대응 픽셀을 탐색할 수 있다(Bentley, 1975). 의암호는 저수지 특성상 수면 경사가 매우 완만하다고 가정하고, 위성영상 촬영 시점의 수위(69.89 m)를 기준 수위로 설정한 뒤, 하상고를 수위에서 차감하여 각 관측지점의 수심을 산정하였다.
3.3 모델 평가지표
본 연구에서는 RF 및 GWR 기반 SDB 모델의 예측 성능을 평가하기 위해 결정계수(), 평균제곱근오차(), 평균절대백분율오차(), 및 절대 편향지수()를 사용하였다. 각 모델 평가지표는 아래와 같이 정의된다.
여기서 는 지점 에서의 관측 수심, 는 총 관측지점 수, 는 대상 영역 내 관측 수심의 평균값이다. 이들 평가지표를 종합적으로 활용함으로써 모델의 정확도, 상대적 오차 수준, 그리고 편향 특성을 다각도로 평가하였으며, RF 및 GWR 기반 SDB 모델의 성능을 정량적으로 비교·검증하였다.
4. 결과 및 고찰
4.1 RF 수심 추정 결과
본 연구에서는 RF 모델의 입력 변수를 구성할 때, 수체의 분광적 이질성과 비선형적 감쇠 특성을 반영할 수 있도록 다층적 분광 정보를 활용하였다. 단일 밴드 반사도를 기본 입력으로 사용하고, 수심 증가에 따른 비선형적 반사도 감소 특성을 고려하기 위해 각 반사도의 자연로그 값을 추가하였다. 또한 밴드 간 상대적 스펙트럼 대비를 표현하기 위해 총 11개 밴드를 이용하여 조합 가능한 반사도 비율과 그 자연로그 변환값을 입력 변수에 포함하였다.
이후 전체 자료를 표본 분포의 대표성이 유지되도록 층화추출(stratified sampling) 방식으로 학습 자료와 검증 자료를 분리하여, 70%를 학습 자료로 사용해 RF 기반 SDB 모델을 구축하고, 나머지 30%를 독립적인 검증 자료로 활용하여 모델의 예측 성능을 평가하였다. Table 1에 요약된 바와 같이 RF 기반 SDB 모델은 학습 자료에서 = 0.94, = 0.77 m로 수심 변동성에 대한 높은 설명력과 낮은 오차를 보였으며, 검증 자료에서도 = 0.85, = 1.18 m로 전반적으로 우수한 예측 성능을 유지하였다. 와 또한 학습·검증 단계 모두에서 각각 약 10 ~ 20%, 1% 미만 수준의 오차율을 보여, RF 모델이 의암호 수심 추정에 있어 충분한 신뢰도를 확보한 것으로 판단된다.
Table 1.
Summary of model evaluation metrics for RF and GWR models
| Metrics | RF | GWR | ||
| Training ( = 67,452) | Testing ( = 28,909) | Training ( = 67,452) | Testing ( = 28,909) | |
| 0.94 | 0.85 | 0.98 | 0.94 | |
| (m) | 0.77 | 1.18 | 0.41 | 0.77 |
| (%) | 12.0 | 18.8 | 7.0 | 14.6 |
| (%) | 0.11 | 0.22 | 0.29 | 0.79 |
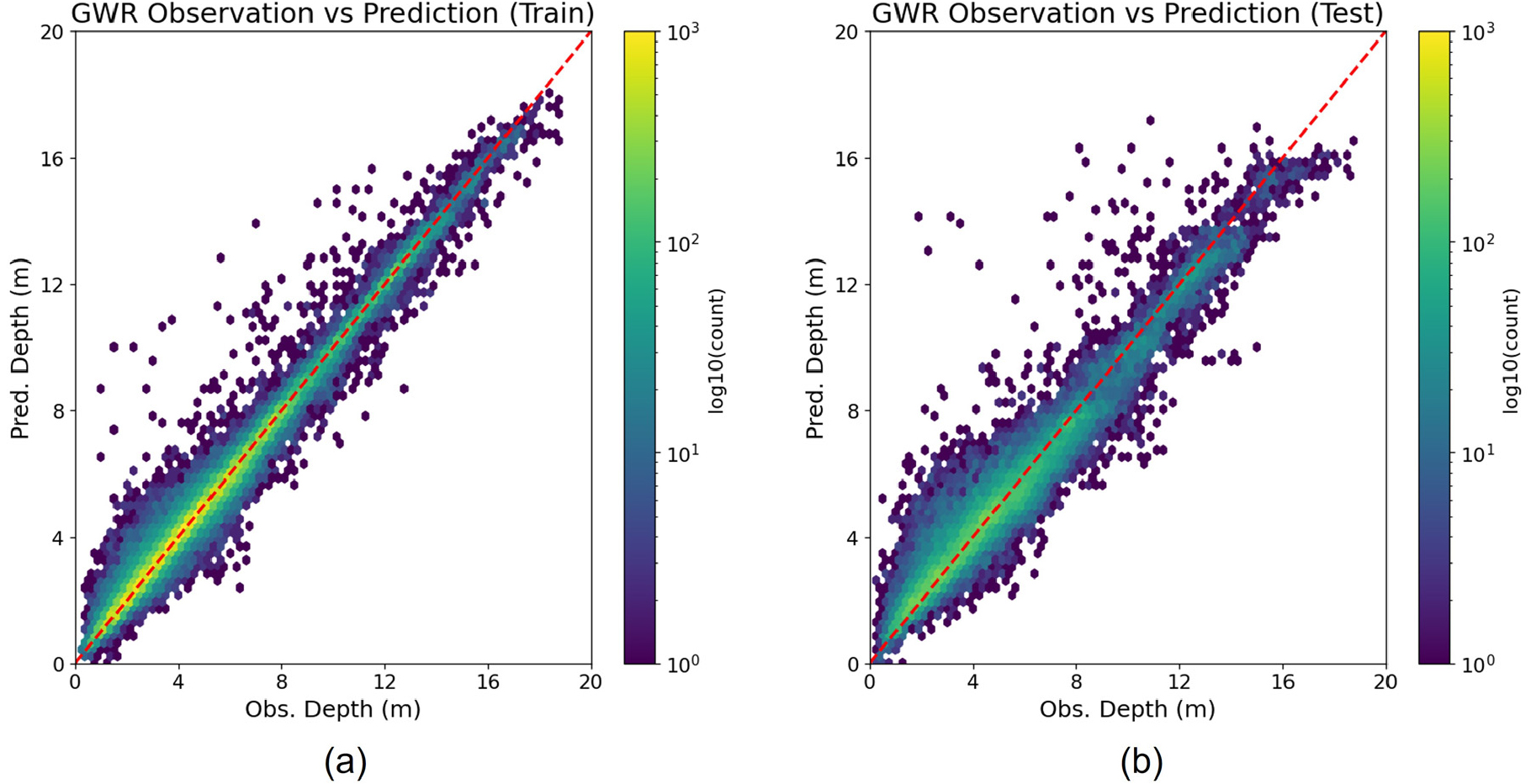
Fig. 3에 나타난 바와 같이, 학습 및 검증 단계 모두에서 관측 수심과 예측 수심은 1:1 선 주변에 높은 밀도를 형성하며, 10 m 이하 수심 범위에서 특히 안정적인 응집 패턴을 보인다. 이는 RF가 다양한 수심 범위에서 분광반사도와 수심 간의 비선형 관계를 효과적으로 학습하였음을 의미한다. 한편, 약 10 m 이상 수심에서는 RF 모델이 과소 예측하는 경향이 나타나는데, 이는 심수 구간에서 바닥 신호의 약화로 인해 수심 변화에 대한 반사도의 민감도가 낮아지고 관측 표본도 상대적으로 제한적이기 때문인 것으로 분석된다(Wu et al., 2021; Wang et al., 2022).
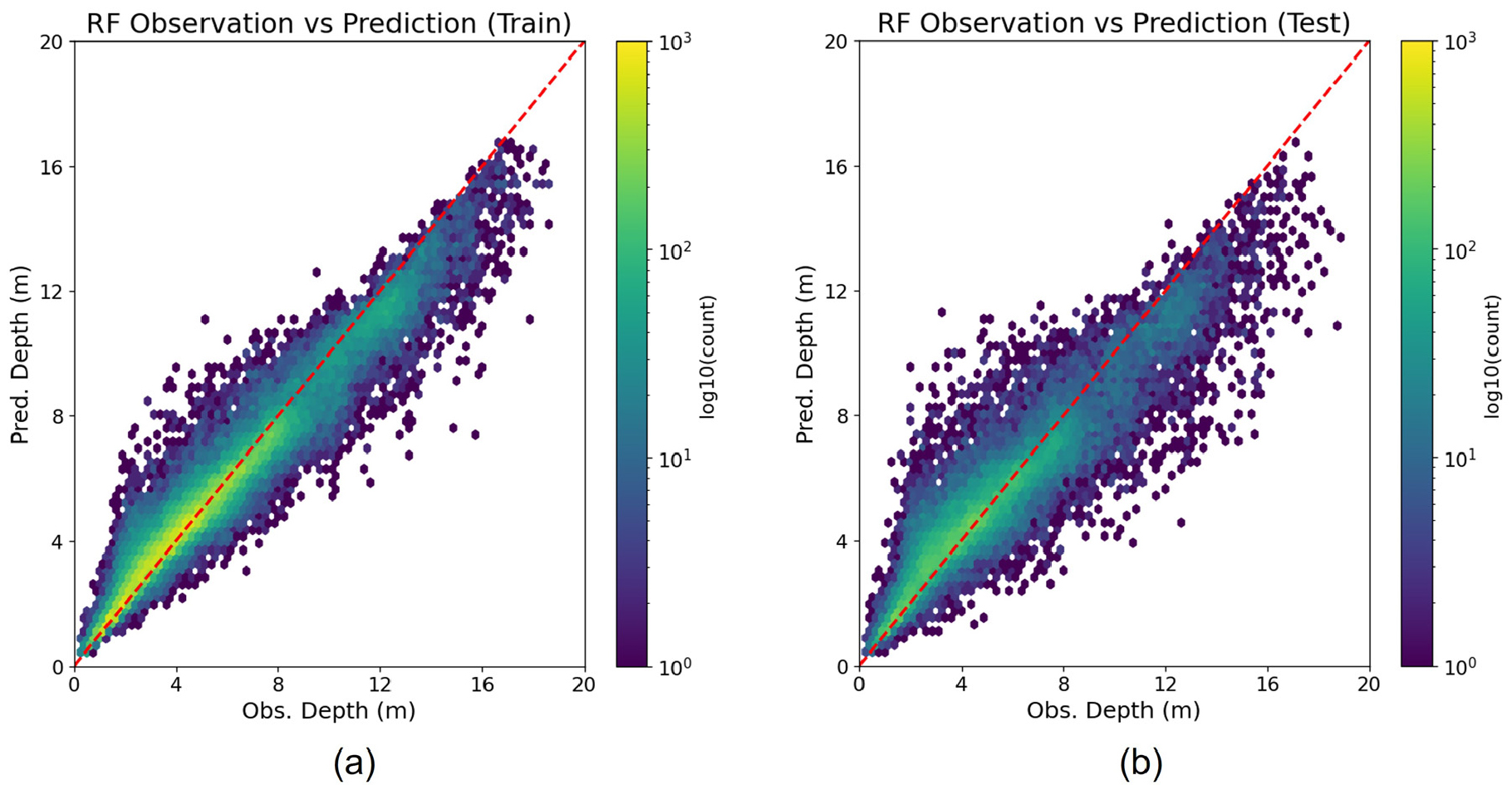
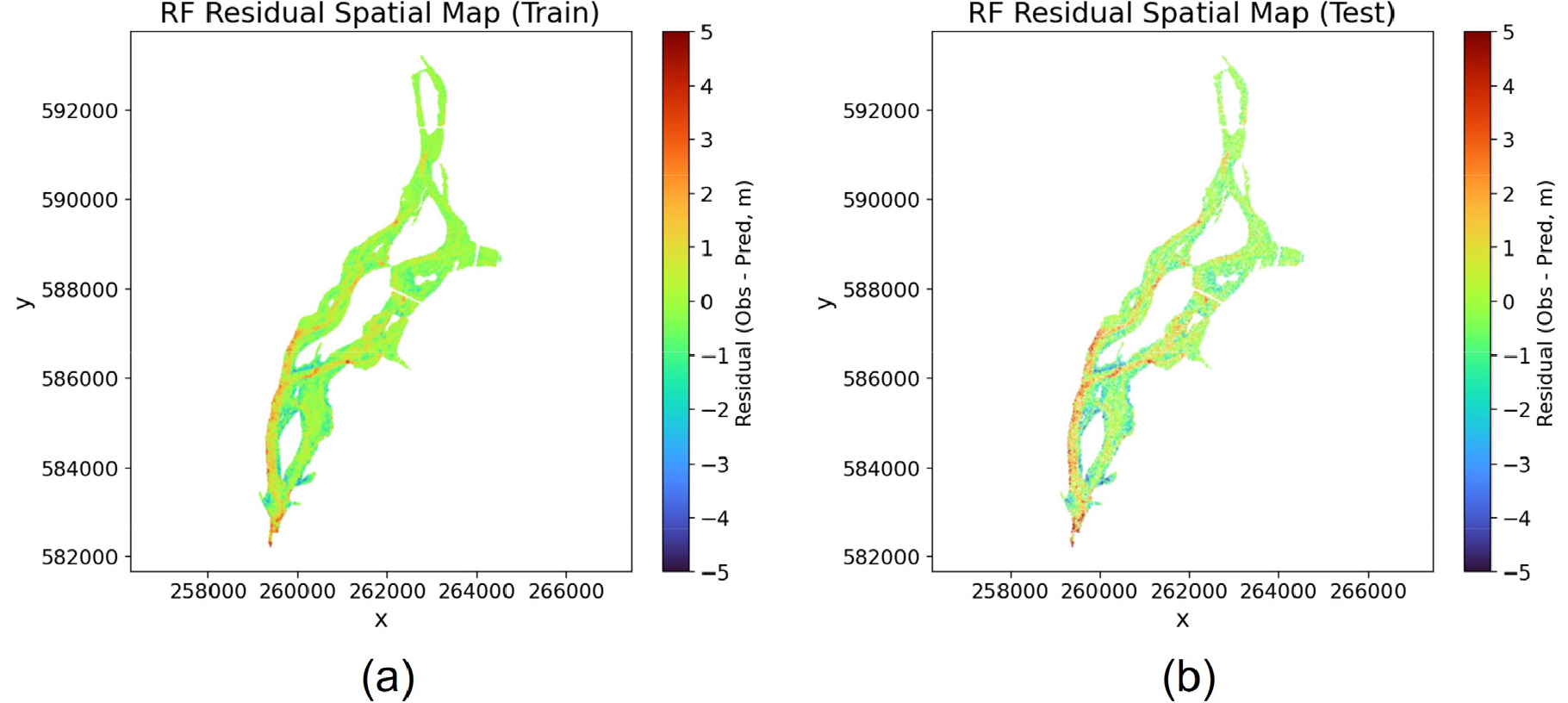
Fig. 4의 잔차 공간분포도에 따르면, 수심 약 10 m 이하 구간에서는 대부분 ±1 m 이내의 오차 범위를 보이며 비교적 안정적인 예측 성능을 유지한다. 그러나 전역적으로는 특정 구간에서 오차가 크게 확대되는 패턴이 관찰되어, 모델의 공간적 일반화 능력이 수심대별로 일관되게 확보되었다고 보기는 어렵다. 특히 의암호 하류 우안의 10 m 이상의 심수 구간(Fig. 2)에 5 m 이상의 잔차(= 관측값 - 예측값)가 집중되는 특징을 보였는데, 이 지역은 수심이 급격히 변화하고 수심 대비 분광 반사도 반응이 약화되기 때문에 예측 오차가 국지적으로 크게 증가한 것으로 판단된다. 이러한 양상은 학습 자료에서도 확인되었고, 검증 자료에서 보다 뚜렷하게 나타났다.
이와 같은 심부 수심의 일관적인 과소추정 경향은 단순한 바닥 신호 감쇠 현상으로도 설명 가능하나(Wang et al., 2022), 수심대별 자료 분포와 분광 민감도의 차이가 복합적으로 작용한 결과로 해석된다. 본 연구에서 적용한 RF 기법은 공간적·수심대별 반응 특성을 구분하지 않는 전역적 회귀모델이므로, 전체 수심 범위를 단일한 모델 구조로 설명하게 된다. 이때 상대적으로 표본 수가 많고 바닥 신호가 강한 천수 및 중간 수심 구간의 패턴이 모델의 학습 과정을 주도하게 되고, 관측 표본이 적고 반사도의 민감도가 낮은 심부 구간의 특성은 충분히 학습되지 못한다(Dekker et al., 2011; Wu et al., 2021). 그 결과, 심부에서는 전역적 반응 형태가 그대로 적용되면서 수심이 과소 추정된 것으로 분석된다. 이는 심수 영역에서의 분광 감쇠 효과와 더불어, 심부 자료의 희소성과 수심-반사도의 낮은 민감도로 인해 모델이 깊은 수심의 고유한 반응 구조를 학습하기 어려운 점이 함께 작용한 결과로 사료된다.
종합하면, RF 기반 SDB 모델은 의암호 대부분의 수역에서 높은 예측 정확도와 안정적인 공간적 일관성을 보였으나, 학습 과정이 천수 및 중간 수심 패턴에 상대적으로 최적화되는 특성으로 인해 심부 영역에서는 과소추정 경향이 확인되었다.
4.2 GWR 수심 추정 결과
GWR은 RF와 달리 수심-반사도의 선형 관계를 공간적으로 해석하기 때문에 수심과 가장 높은 상관성을 보이는 분광 정보를 입력 변수로 사용하였다. 앞서 RF 모델에서 사용된 모든 입력 변수와 수심 간의 상관분석 결과, 밴드 559 nm와 밴드 665 nm 비의 자연로그 값, 가 상관계수 0.53으로 수심 변화에 가장 민감하게 반응하는 것으로 나타났다. 일반적으로 SDB 입력 변수로 사용되는 Stumpf et al. (2003)가 제시한 역시 다른 반사도 변수 대비 0.38의 상대적으로 높은 상관계수가 확인되었으나, 수질 변동성이 상대적으로 작은 천수 연안 환경을 대상으로 수행된 기존 연구와 달리, 수질 변동성이 크고 10 m 이상의 심수 영역을 포함하는 내륙 호소인 의암호에서는 의 영향이 보다 지배적으로 나타났다. 밴드 665 nm는 Chl-a의 흡수 피크가 나타나는 파장대로서, Chl-a 농도 변화에 대한 높은 민감도를 지니는 것으로 알려져 있다(Gitelson, 1992; Moses et al., 2009). 이러한 특성은 Chl-a 농도의 변동성이 큰 내륙 호소에서 수심 신호와 조류 신호가 동시에 반영된 분광 정보를 고려하는 것이 수심 추정의 정확도 향상에 기여함을 시사한다. 이에 따라, 본 연구에서는 를 단일 입력 변수로 하여 GWR 기반 SDB 모델을 구축하였다.
수심 추정 결과, GWR 모델은 전반적으로 RF 모델 대비 더 높은 예측 정확도를 보였다. 훈련자료에서도 전반적인 성능 향상이 확인되었으며, 특히 검증자료에서 그 개선 폭이 더욱 뚜렷하게 나타났다. GWR 모델은 검증자료에서 = 0.94로 나타나는 등 RF 모델의 0.86 대비 9.3%의 정확도 상승을 보였고, 역시 1.14 m에서 0.77 m로 감소하여 예측 오차가 약 32% 수준으로 줄어들었다. 역시 18.8% → 14.6%로 감소(오차율이 22.3% 감소)하여, 모델의 전반적인 오차 규모가 정량적으로 유의미하게 개선되었다(Table 1). 는 RF 모델 대비 소폭 상승하였으나, 여전히 오차율 1% 미만으로 유의미한 차이는 나타나지 않았다. 아울러, Fig. 5는 GWR 예측값이 훈련·검증 자료 모두에서 1:1 기준선 주변에 고밀도로 분포하며, 수심 전 범위에서 안정적인 예측 성능을 유지하고 있음을 보여준다. 특히 10 m 이상의 심수 구간에서 RF 모델이 관측값을 지속적으로 과소추정하는 경향을 보인 반면(Fig. 3), GWR 모델은 해당 구간에서도 예측값이 1:1 기준선을 중심으로 비교적 균일하게 분포함으로써, RF 모델에서 나타난 고수심 과소추정 문제를 완화하였다. 이는 GWR이 공간 가중치를 통해 지역별 수심-반사도 관계의 변동성을 효과적으로 반영함으로써, 심수 조건에서도 우수한 예측 정확도가 확보 가능함을 의미한다.
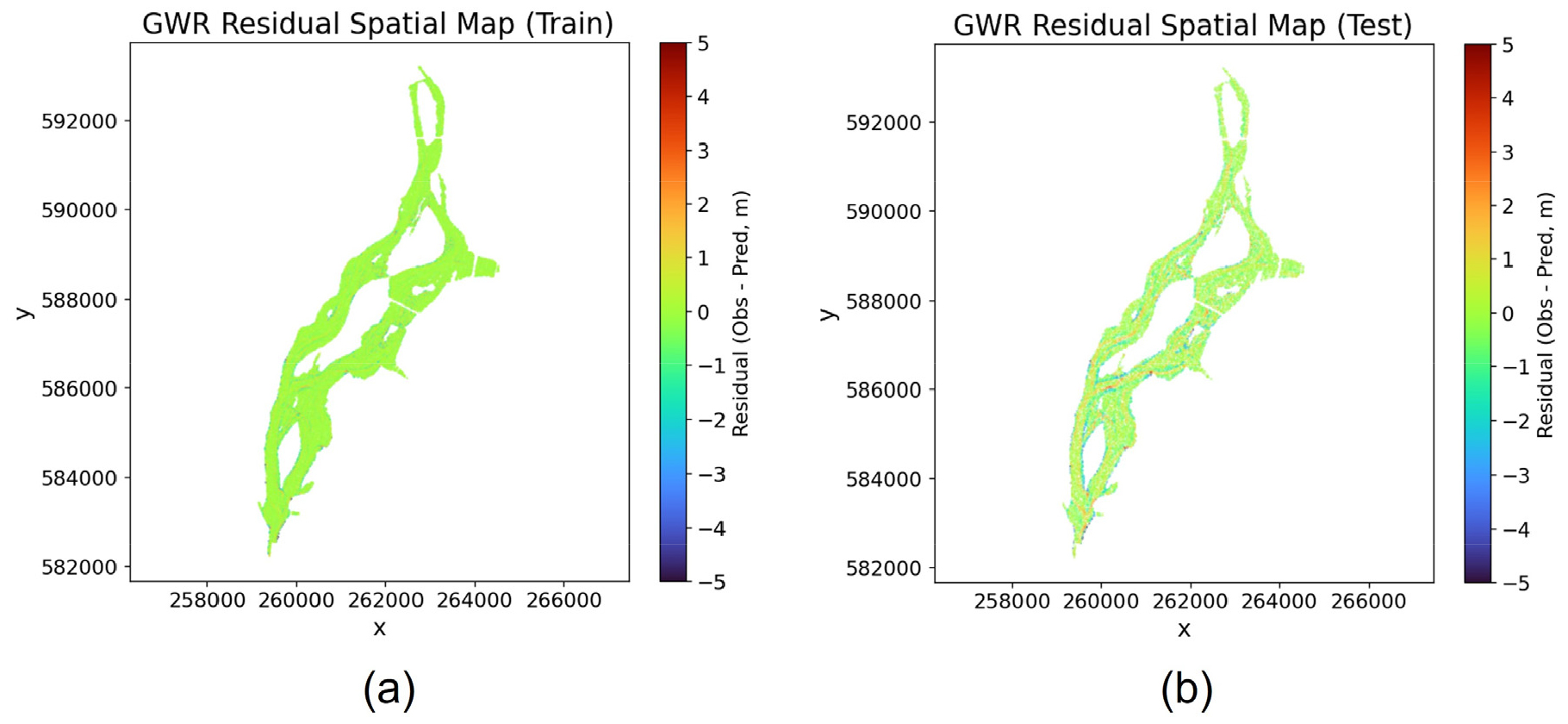
더 나아가, Fig. 6에 제시된 GWR 모델의 잔차 공간분포를 RF 결과(Fig. 4)와 비교하면, RF 모델에서 나타났던 국지적 오차 집중 현상이 전반적으로 감소된 것을 확인할 수 있다. GWR 모델의 잔차는 대부분의 수심 영역에서 훈련 및 검증 자료 모두 ±1 m 이내에 분포하며, 특정 수심대나 공간 영역에 편중되지 않은 비교적 균질한 공간적 패턴을 보인다. 특히 RF 모델에서 5 m 이상의 잔차가 집중적으로 발생하였던 의암호 하류 우안의 심수 구간에서도, GWR 적용 시 잔차 규모가 현저히 감소하여 국지적인 과소추정 경향이 효과적으로 완화되었다. 이러한 결과는 GWR이 공간 가중치를 통해 지역별 수심-반사도 관계의 공간적 변동성을 반영함으로써, 수심 변화가 급격한 구간에서도 보다 안정적이고 일관된 예측 성능을 확보할 수 있음을 시사한다.
RF 모델과 GWR 모델의 잔차 분포를 비교한 결과(Fig. 7), 두 모델 간 예측 성능 차이는 잔차의 공간적 분포 특성뿐만 아니라 통계적 분포 형태에서도 명확하게 나타났다. 훈련 및 검증 자료 모두에서 GWR 모델의 잔차 분포는 RF에 비해 0을 중심으로 보다 뾰족하고 대칭적인 형태를 보이며, 잔차 분산이 상대적으로 작게 나타났다. 이는 GWR이 전반적으로 예측 편차를 효과적으로 감소시키고, 극단적인 오차 발생 빈도를 낮추는 데 기여했음을 의미한다.
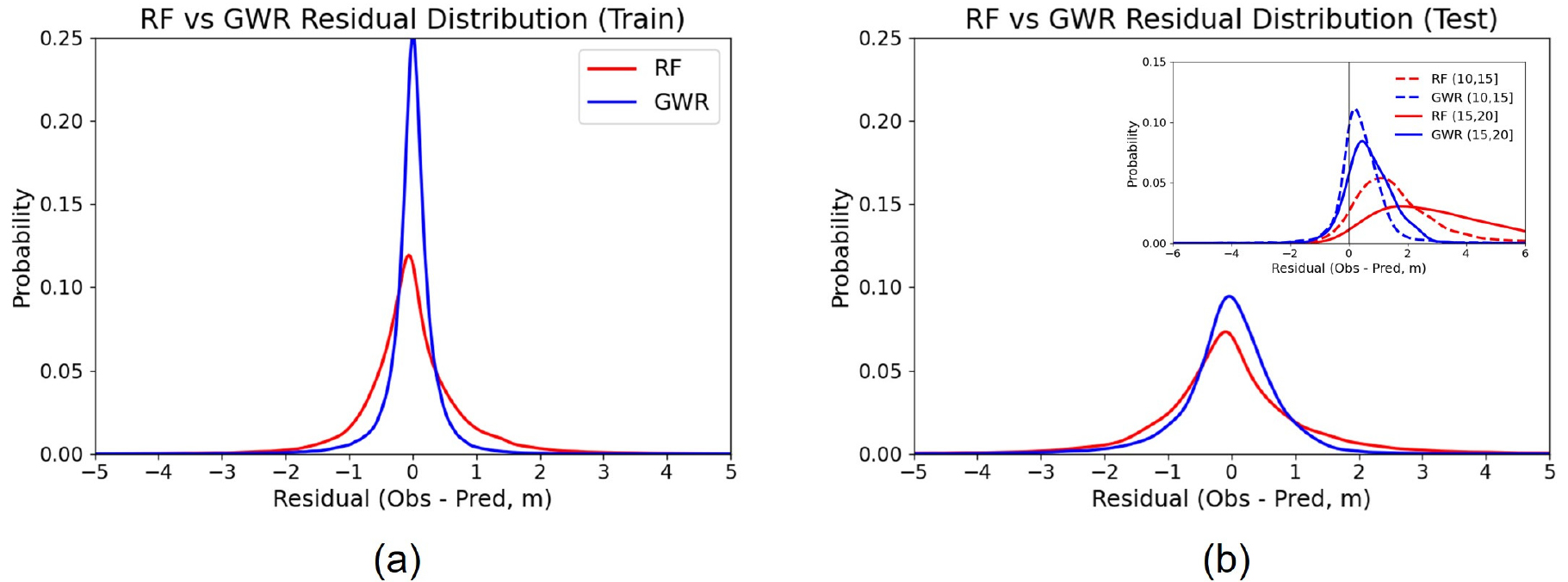
특히 검증 자료에서 RF 모델의 잔차 분포는 상대적으로 넓은 분산과 함께 꼬리가 두꺼운 형태를 보여, 일부 구간에서 큰 오차가 지속적으로 발생하고 있음을 보여준다. 반면 GWR 모델은 검증 자료에서도 잔차 분포가 0 주변에 보다 집중된 형태를 유지하여, 학습 자료에 대한 과적합 없이 공간적으로 보다 안정적인 일반화 성능을 확보한 것으로 판단된다. 이러한 차이는 Figs. 4 and 6에 제시된 잔차의 공간분포 특성, 특히 국지적으로 큰 잔차가 집중된 심수 영역에서의 오차 감소 경향과도 일관된 결과를 보인다.
한편, RF 모델은 Figs. 3 and 4에서 확인되듯이 심수 영역에서 관측 수심 대비 과소추정 경향을 보임에도 불구하고, 전체 잔차 분포(Fig. 7)는 전반적으로 정규분포에 가까운 형태를 나타낸다. 이는 전체 관측 자료가 상대적으로 많은 천수 영역에 집중되어 있어, 심수 영역에서 나타나는 잔차 편향 특성이 전체 분포에서는 일부 상쇄되어 나타난 결과로 해석될 수 있다. 이에 심수 영역의 잔차 분포 특성을 추가 분석하였다. 그 결과, Fig. 7(b) 삽입도에 나타낸 바와 같이 수심 10 m 이상 조건에서 RF 모델 검증 결과의 잔차 분포는 관측값 대비 과소추정 경향으로 인해 양의 방향으로 치우치며, 분포의 폭 또한 상대적으로 크게 나타났다. 반면, GWR 모델은 동일 수심 구간에서 잔차 분포의 중심이 0에 보다 근접하고, 분산이 작게 유지되는 경향을 보였다.
이와 같은 결과는 RF와 같은 전역적 비모수 회귀모델이 복잡한 비선형 관계를 효과적으로 학습할 수 있음에도 불구하고, 복잡한 수질·지형 조건으로 인해 광학적 특성이 공간적으로 급격히 달라지는 내륙 호소 환경에서는 지역별 수심-반사도 관계의 이질성을 충분히 반영하는 데 구조적 제약이 존재함을 보여준다. 반면 GWR은 위치 기반 공간 가중치를 통해 국지적 회귀계수를 추정함으로써, 동일한 분광 정보에 대해서도 공간적 맥락에 따른 차별화된 반응을 반영할 수 있으며, 그 결과 잔차의 공간적·통계적 변동성을 동시에 감소시키는 효과를 보였다.
Fig. 8은 RF 모델과 GWR 모델에 의해 추정된 수심 분포도를 관측 수심과 함께 비교하여 나타낸 것이다. 관측 수심 분포에서는 하류 구간에서 심수 영역이 우안을 따라 길게 발달하고, 중앙부의 분기 및 섬 인접 구간에서도 수심 구배가 흐름 방향을 따라 연속적으로 전이되는 공간 구조가 뚜렷하게 나타난다(Fig. 8(a)). 두 모델 모두 이러한 대규모 수심 구배, 즉 하류 방향으로 증가하는 전반적인 수심 변화 경향과 주요 고·저수심 영역의 공간적 위치는 비교적 잘 재현하고 있으나, 관측 수심이 갖는 연속적인 전이 구조를 공간적으로 재현하는 특성에는 차이가 확인된다.
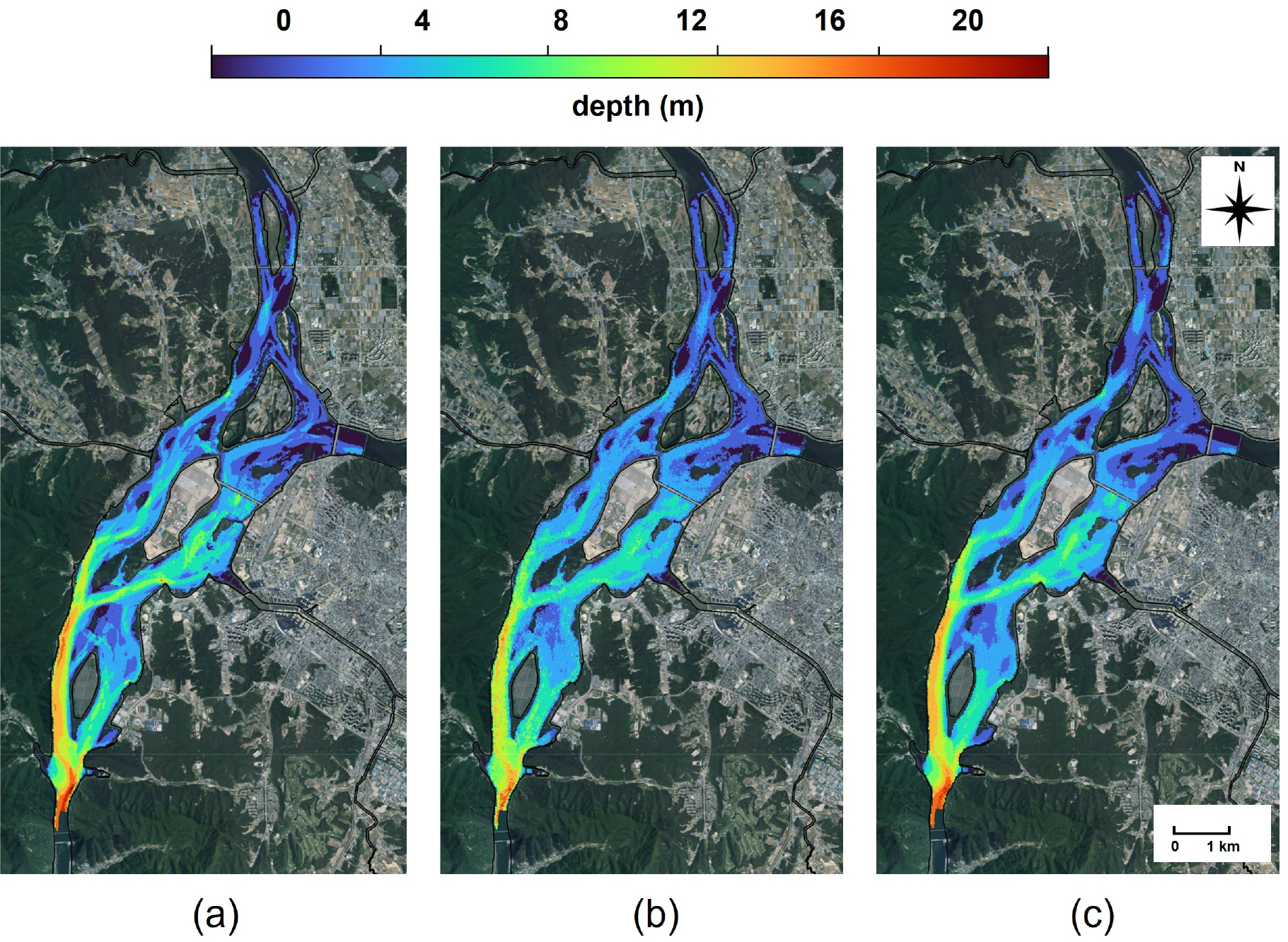
RF 기반 수심 분포도는 관측값에서 확인되는 고·저수심 영역의 전반적인 수심 변동성은 비교적 잘 반영하고 있으나, 일부 구간에서는 유사한 수심 값이 인접 셀 단위로 군집화된 패치형 분포가 나타난다(Fig. 8(b)). 그 결과, 관측 수심 분포에서 확인되는 연속적인 띠 형태의 전이 구조와 수심 구배의 방향성이 상대적으로 약하게 표현되는 경향이 관찰된다. 예를 들어, 하류 구간의 관측값에서는 심수 영역이 하안을 따라 비교적 연속적으로 연결되는 양상을 보이는 반면, RF 모델에서는 동일 구간의 심수 영역이 부분적으로 분절되어 나타나거나 주변 수심과의 경계가 국지적으로 단편화되는 경향이 확인된다. 아울러, 앞서 설명한 바와 같이(Fig. 4), 해당 구간에서는 관측값에 비해 수심이 상대적으로 낮게 추정되는 경향도 함께 나타나는데, 이는 전역 모델 특성상 다양한 수심 범위의 자료를 단일 관계로 학습하는 과정에서, 고수심과 같은 극치 영역의 공간적 변동성이 상대적으로 평균화되어 표현된 결과로 해석될 수 있다(Dekker et al., 2011).
반면 GWR 모델은 관측값에서 나타나는 심수 영역의 연장 방향과 주요 수심 구배의 공간적 연결성을 보다 잘 재현하였다(Fig. 8(c)). 특히 하류 구간에서 심수 영역이 하안을 따라 연속적으로 이어지며, 중앙부의 분기·합류 및 하중도 인접 구간에서도 수심이 주변 영역으로 점진적으로 전이되는 패턴이 관측 분포와 보다 유사하게 나타났다. 이는 GWR 모델이 공간 가중을 통해 위치별 수심-반사도 관계의 차이를 반영함으로써, 국지적인 수심 변화와 그 주변으로의 전이 구조를 보다 안정적으로 모사한 결과로 판단된다.
결론적으로, RF 및 GWR 모델로부터 추정된 수심 분포의 차이는 실제 의암호 지형이 갖는 공간적 전이 구조의 연속성, 방향성 및 인접 영역 간 연결성을 모델이 얼마나 충실히 재현하는가에 기인한다. 이러한 관점에서 GWR 모델은 광학적 이질성이 크고 수심 구배가 공간적으로 급변하는 내륙 호소 환경에서 전역 모델 기반의 RF 접근법에 비해 관측 수심 분포와의 공간적 일치도를 효과적으로 향상시키는 것으로 나타났다. 또한 본 연구에서 제안한 GWR 기반 접근을 적용한 결과, 위성영상 자료를 이용한 수심 추정은 약 19 m까지 안정적으로 수행 가능한 것으로 확인되었다. 이는 선행연구에서 제시된 SDB의 유효 적용심도와 비교할 때, Legleiter and Fosness (2019)가 OBRA (Optimal Band Ratio Analysis) 기법을 통해 제안한 약 9.5 m를 상회하며, 최근 초분광 영상과 기계학습 기반 접근을 통해 최대 약 30 m까지의 적용 가능성을 제시한 Kwon et al. (2024) 및 약 15 m 수준을 보고한 Legleiter et al. (2025)에서 제시한 적용 범위와도 유사한 수준이다.
4.3 광학적 이질성
의암호 수체의 광학적 이질성은 GWR 회귀계수와 절편의 공간적 변동성을 통해 정량적으로 확인할 수 있다. Fig. 9(a)에 도시된 GWR 회귀계수의 공간분포를 보면, 계수의 크기가 의암호 상·하류를 걸쳐 국지적으로 변화하는 복잡한 공간 패턴을 나타내며, 수심-반사도 관계가 공간적으로 균질하지 않음을 확인할 수 있다. 이러한 회귀계수의 공간적 변동성은 동일한 분광 입력에 대해서도 수심 변화에 대한 민감도가 위치에 따라 상이함을 의미하며, 수심 변화, 바닥 반사 특성, 수질 조건 등 다양한 광학적 요인이 공간적으로 결합되어 작용하고 있음을 설명한다.
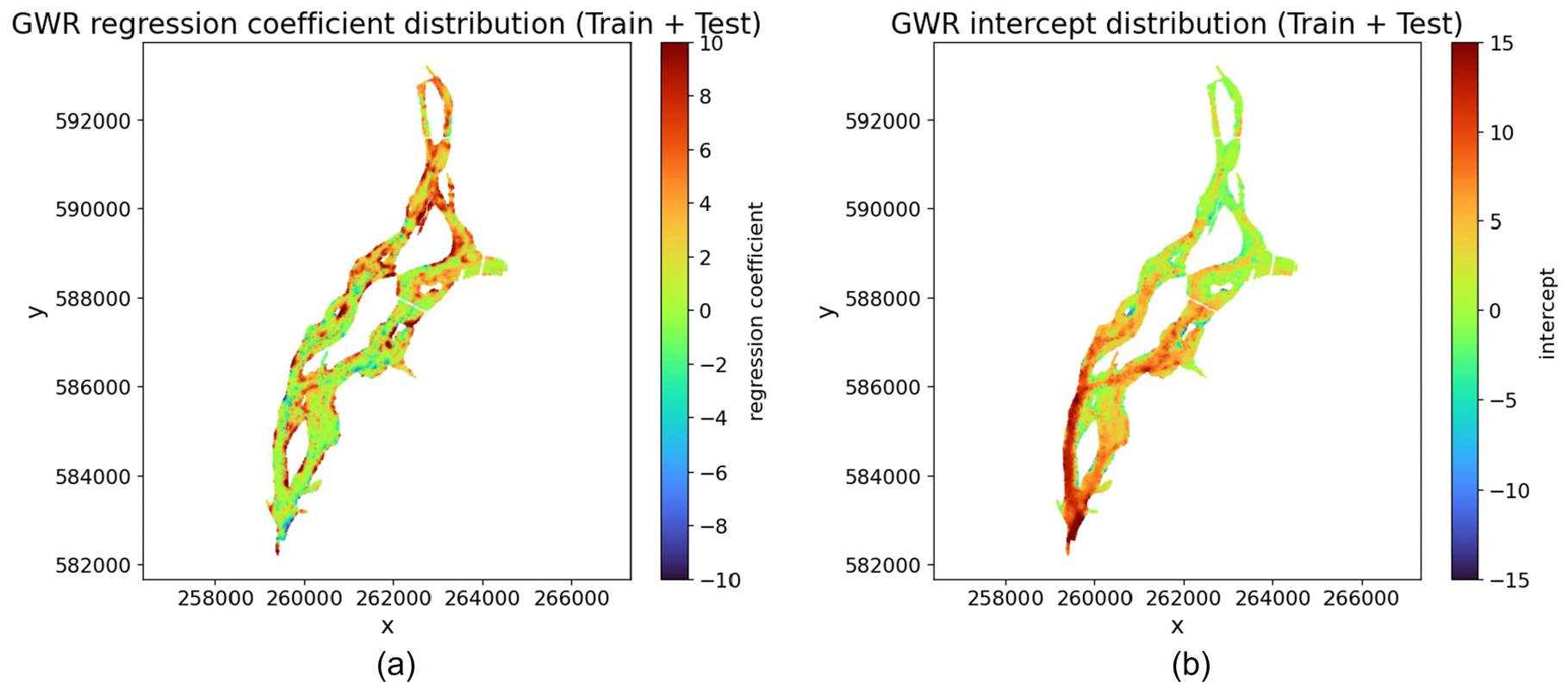
특히 하중도 주변 및 하류 우안 구간을 포함한 일부 영역에서는 회귀계수의 크기가 공간적으로 불균질하게 분포하며 국지적 변동성이 뚜렷하게 나타난다. 이는 수심 증가에 따른 분광 감쇠 효과와 바닥 반사 영향이 국지적으로 중첩되거나, 광학적으로 얕은 수층과 깊은 수층(optically deep water) 조건이 공간적으로 교차하는 환경에서 수심-반사도 관계가 단순한 단조 함수로 유지되지 않음을 의미한다. 반면 상류의 천수 영역에서는 하류의 심수 영역과 비교하여 상대적으로 큰 회귀계수 값이 분포하는 경향이 확인되는데, 이는 얕은 수층에서 바닥 반사 성분의 기여도가 증가함에 따라 수심 변화에 대한 분광 반사도의 민감도가 커지고, 그 결과 수심-반사도 관계가 국지적으로 비선형화되는 광학적 조건을 반영한 결과로 해석할 수 있다(Kim et al., 2019).
Fig. 9(b)에 나타낸 절편의 공간 변동성은 동일한 수심 조건에서도 위치에 따라 기본 반사도 수준이나 광학적 배경 조건이 다름을 반영하며, 이는 수질 조건이나 바닥 재질의 공간적 변화와 밀접하게 연관되어 있음을 보여준다. 특히 RF 모델에서 큰 잔차가 집중되었던 하류 우안의 심수 구간에서 절편 항이 상대적으로 크게 조정된 점은, 해당 영역의 국지적 분광 특성 차이를 반영하여 수심-반사도 관계의 기준 반사도가 보정되었음을 설명한다. 이는 국지적 회귀 구조를 통해 광학적 배경 조건의 공간적 이질성을 반영함으로써, 결과적으로 예측 오차 완화에 기여한 것으로 판단된다.
Kwon et al. (2024)은 수심 증가에 따라 반사도 신호를 지배하는 광학 메커니즘이 변화함을 보고하였으며, 천수 영역에서는 바닥 반사 신호가 우세한 반면 심수 영역으로 갈수록 바닥 반사 신호가 약화되고 수체에 의한 광 감쇠 효과가 반사도 변동을 지배하는 것으로 나타났다. 이러한 수심 의존적 광학 특성의 변화는 본 연구에서 심수 영역에서 관측된 GWR 회귀계수 감소와 절편 증가의 패턴을 물리적으로 설명하는 근거를 제공한다. 즉, 심수 구간에서는 바닥 반사에 기인한 수심 신호의 반사도 민감도가 전반적으로 약화되는 반면, 수체에 의한 광 감쇠 효과가 반사도 변동을 지배하게 되면서, 수심-반사도 관계의 기울기보다는 이러한 광 감쇠 특성을 반영하는 절편 항의 상대적 중요성이 증가하는 경향이 나타난 것으로 해석된다.
이러한 회귀계수 및 절편의 공간 가변성을 통해 GWR이 단순히 통계적 적합도를 향상시키는 데 그치지 않고, 의암호에서 수심-반사도 관계를 지배하는 물리적·광학적 이질성에 대한 공간 정보를 내포하고 있음을 확인할 수 있다. 즉, GWR은 수심, 바닥 반사, 조류 분포 등에 의해 공간적으로 변화하는 수체의 광학적 특성을 공간 가변 매개변수로 표현함으로써, 수심 변화가 급격하거나 광학적 조건이 복잡한 수체 환경에서도 보다 안정적인 수심 추정이 가능함을 구조적으로 뒷받침한다.
5. 결 론
본 연구에서는 Sentinel-2 위성영상을 이용하여 의암호의 수심을 추정하고, 수체의 광학적 이질성이 위성 기반 수심 추정 정확도에 미치는 영향을 분석하였다. 이를 위해 전역적 비모수 기계학습 모델인 RF와 공간 가변 회귀모델인 GWR을 동일 자료에 적용하여 예측 성능을 비교·평가하였다.
연구 결과, RF 모델은 의암호 전반의 수심 분포 패턴을 비교적 안정적으로 재현하였으나, 광학적 조건이 급변하는 구간, 특히 하류 우안의 심수 영역에서는 수심을 과소 추정하는 경향이 나타났다. 이는 전역 모델 특성상 다양한 수심 범위와 광학 조건을 단일한 관계로 학습하는 과정에서, 심부 구간의 국지적 수심-반사도 특성이 충분히 반영되지 못한 결과로 해석된다. 반면 GWR 모델은 공간 가중치를 통해 위치별 수심-반사도 관계를 국지적으로 추정함으로써, 심수 영역에서의 과소추정 문제를 효과적으로 완화하였으며, 학습·검증 자료 모두에서 RF 대비 우수한 예측 성능을 보였다.
또한 GWR 회귀계수와 절편의 공간 분포 분석을 통해, 의암호 수체가 수심 변화, 바닥 반사 특성, 수질 조건 등에 의해 지배되는 강한 광학적 이질성을 지니고 있음을 정량적으로 확인하였다. 회귀계수는 상·하류 및 하중도 인접 구간에서 국지적으로 크게 변동하였으며, 절편 역시 위치에 따라 상이한 분광 배경 조건을 반영하는 양상을 보였다. 이는 GWR이 단순히 통계적 적합도를 향상시키는 데 그치지 않고, 수심-반사도 관계를 지배하는 물리적·광학적 이질성을 공간 가변 매개변수로 모형화할 수 있는 구조적 장점을 지님을 확인하였다. 단, GWR은 관측 지점에서만 회귀계수가 직접 추정된다는 구조적 특성으로 인해 관측이 존재하지 않는 영역에서는 회귀계수 자체가 정의되지 않으며, 모델의 직접적인 적용에 한계가 존재한다. 그럼에도 불구하고 회귀계수가 구축된 영역에 대해서는 전역 모델 대비 높은 수심 추정 정확도를 제공함으로써, 시기별 저수량을 보다 정밀하게 산정할 수 있으며 이는 댐 운영 및 저수지 관리의 효율성을 향상시키는 데 기여할 수 있다.
본 연구에서는 고해상도 LiDAR 자료를 활용하여 GWR 모델을 구축하였으나, 실제 현장에서는 ADCP 등 접촉식 센서를 이용한 측선 관측이 일반적이므로 참조 수심 자료의 공간 해상도는 상대적으로 제한적이다. 기존 연구에서는 이러한 저해상도 관측자료를 기반으로 GWR을 적용한 사례가 보고되었으며, 입력 변수와 예측값 간 관계가 공간적으로 비정상적임이 확인된 바 있다(Kim et al., 2018; Longhi, 2023). 그럼에도 불구하고, 관측자료의 공간 해상도 및 공간 분포 특성에 따른 GWR 예측 정확도의 변화 양상을 정량적으로 평가한 연구는 아직 제한적이다. 이에 따라 향후 연구에서는 학습 자료의 공간 해상도에 대한 예측 결과의 의존성을 체계적으로 분석할 필요가 있다. 또한 수심 구간에 따라 수심-반사도 간의 광학적 반응 특성이 상이하게 나타난 본 연구의 결과를 고려할 때, 수심 구간별 자료를 군집화하고 각 군집에 대해 독립적인 기계학습 모델을 구축하는 접근이 예측 성능 개선에 기여할 가능성이 있다.
한편, 본 연구에는 단일 시기의 위성영상을 사용하였다는 한계가 존재한다. 수심 및 하상 재질에 기인한 바닥 반사 특성은 비교적 수위가 일정하게 유지되는 의암호의 경우 단기간의 계절 변화에 따라 크게 달라지지 않는 반면, 수질 조건은 계절에 따른 기상·수문·수리 여건의 변화에 의해 시공간적으로 크게 변동한다. 특히 조류 증식, 부유물질 농도 변화 등은 수체의 분광 반사 특성을 직접적으로 변화시키는 주요 요인으로 작용한다. 이러한 점에서 본 연구에서 구축한 RF 및 GWR 모델은 특정 시기의 광학 조건을 반영한 결과로 해석될 수 있다.
더 나아가, 본 연구 결과에서 Chl-a의 흡광 특성이 뚜렷하게 나타나는 665 nm 밴드가 수심 예측에 중요한 반사도 변수로 작용한 점은, 수심-반사도 관계가 수심 자체뿐만 아니라 계절적 조류 분포와 밀접하게 연관되어 있음을 보여준다. 이는 조류 농도가 계절에 따라 변화하는 호소 환경에서는 동일한 수심 조건에서도 분광 반사도의 응답 특성이 달라질 가능성이 있음을 의미하며, 단일 시기 자료에 기반한 수심 추정 결과를 해석함에 있어 이러한 계절적 요인을 함께 고려할 필요가 있다.
따라서 향후 연구에서는 다시기 위성영상과 다양한 수질 조건을 포함한 자료를 활용하여 모델을 적용·검증함으로써, 계절적 수질 변동성, 특히 Chl-a 농도 변화가 수심 추정 성능과 회귀계수의 공간 분포에 미치는 영향을 체계적으로 분석할 필요가 있다. 이러한 접근은 광학적 조건이 시기별로 크게 변화하는 호소 환경에서 위성 기반 수심 추정 기법의 신뢰성과 적용 범위의 일반화를 한층 강화하는 데 기여할 것으로 기대된다.
