

1. 서 론
2. 딥 러닝 기반 강수 나우캐스팅 모델의 기본 유형
2.1 합성곱 신경망(CNN) 기반 모델
2.2 순환 신경망(RNN) 기반 모델
2.3 생성적 적대 신경망(GAN) 기반 모델
3. 기존 문제 해결을 위한 전략
3.1 손실 함수 조정
3.2 데이터 불균형 문제 해결 방안
3.3 앙상블 모델
3.4 모델에 인간의 이해 통합
4. 향후 과제
4.1 딥 러닝 모델과 기상 이해의 격차 해소
4.2 딥 러닝의 실시간 예보 통합과 과제
4.3 대규모 나우캐스팅 모델의 개발 및 공유
4.4 도시 홍수 저감을 위한 딥러닝 나우캐스팅 모델의 활용 전략
5. 결 론
1. 서 론
도시 지역은 넓은 불투수성 표면과 제한된 배수 시설로 인해 극한 강우 시 빗물이 지면에 스며들지 않고 빠르게 유출되어 돌발 홍수가 발생할 위험이 크다(Papagiannaki et al., 2015). 특히, 도시 지역은 비도시 지역에 비해 인구와 인프라가 밀집되어, 홍수 발생 시 교통 마비와 주거 및 상업 지역의 침수에 따른 피해가 더욱 심각할 수 있다(Diakakis et al., 2020; Eini et al., 2020). 이러한 돌발 홍수는 단시간 내에 집중적으로 발생하는 극한 강우가 주된 원인이므로, 이에 대응하기 위해서는 장기 예보 보다 실시간으로 기상 변화를 빠르고 정확하게 파악할 수 있는 단기 강우 예측의 활용이 강조된다(Fowler et al., 2021; Púčik et al., 2011).
나우캐스팅은 현재 시점에 가까운 미래의 강우의 위치, 강도, 이동 경로를 실시간으로 예측하여, 갑작스러운 폭우와 같은 극단적인 기상 현상에 대응하는데 효과적이다(Fortelli et al., 2019). 이로 인해, 나우캐스팅은 도시 홍수 대응에 있어 다음과 같이 활용될 수 있다: 돌발 홍수나 집중호우 위험을 경고하고(Huggel et al., 2010; Alfieri et al.,2012; Oh et al., 2016; Dao et al., 2020a, 2020b; De Luca and Capparelli, 2022), 교통 및 인프라를 보호하며(Sämann et al., 2022), 경제적 손실을 줄이고(Bellos et al., 2024), 자원을 효과적으로 배분할 수 있다(Talebi et al., 2024). 그럼에도 불구하고, 나우캐스팅 기술은 데이터 불균형(Xu et al., 2024), 모델의 복잡성(Ma et al., 2022a) 등으로 인해 예측 정확도에 여전히 한계를 보여왔다(Caseri et al., 2022). 따라서 본 논문은 도시 홍수 저감을 위한 나우캐스팅 기술의 실질적 적용 가능성을 탐구하기 위해, 최신 연구 동향을 검토하고, 도시 홍수 관리에서 발생할 수 있는 다양한 기술적 한계를 분석하였다. 이를 바탕으로, 도시 홍수 대응에서 나우캐스팅의 활용도를 높이기 위한 구체적인 연구 방향과 전략을 제시하고자 한다.
전통적인 나우캐스팅 방법은 수치예보(Numerical Weather Prediction, NWP) 모델이나 레이더 에코 외삽법에 의존해왔다. 그러나 NWP 모델은 모델 해상도의 제한, 초기 및 경계 조건의 불확실성, 물리적 과정의 불완전한 표현과 관측, 데이터 동화의 어려움 등으로 인해 강수 예측에 한계를 보였으며(Harlim, 2006; Zhu and Thorpe, 2006), 복잡한 연산 과정으로 인해 계산 시간이 길어 실시간 예측에 비효율적이다. 마찬가지로, 광학 흐름 기법을 사용하는 레이더 에코 외삽법(Bowler et al., 2004; Ayzel et al., 2019a)은 강수 시스템의 형성 및 소멸과 같은 비선형 현상을 모델링하는 데 어려움을 겪는다.
최근 컴퓨터 하드웨어 기술의 발전으로, 방대한 레이더 관측 데이터를 활용하여 강수 패턴을 학습하고 예측하는 딥 러닝 기반 나우캐스팅 모델이 주목받고 있다. 딥 러닝은 세 가지 주요 이유로 나우캐스팅에 특히 적합하다(Shi et al., 2017). 첫째, 레이더, 위성, 지상 관측소에서 매일 관측되는 방대한 강수 데이터는 딥 러닝의 빅데이터 요구 사항을 충족한다(Szura, 2018). 둘째, 딥 러닝 모델의 기본 구성 요소인 단일 은닉층 다층 퍼셉트론은 보편적으로 함수를 근사할 수 있다(Csáji et al., 2001). 따라서 수백만 개의 이러한 유닛으로 구성된 딥 뉴럴 네트워크 모델은 시공간 강수 패턴의 복잡한 비선형성을 모델링하는 데 능숙하다(Goodfellow et al., 2016). 마지막으로, 딥 러닝 모델은 주로 큰 행렬 연산을 포함하며, 최근 GPU 기술의 발전으로 이러한 연산을 매우 빠르게 수행할 수 있어, 차원이 훨씬 큰 행렬의 역행렬 계산이 필요한 수치 모델에 비해 훨씬 짧은 시간에 예측을 산출한다. 게다가 딥 러닝 모델은 새로 관측된 데이터로 동적으로 업데이트될 수 있어, 새로운 기상 패턴에 대한 적응성을 높인다.
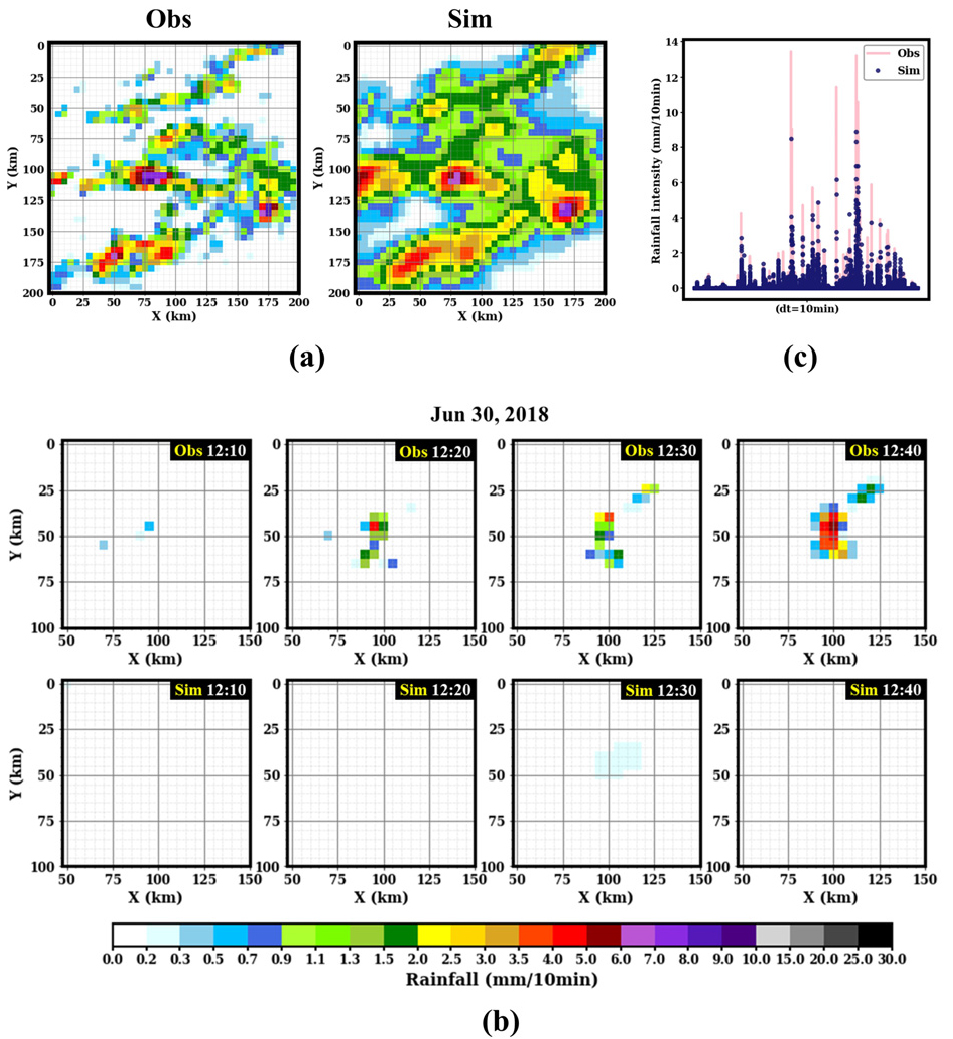
그러나 딥 러닝 기반 모델도 여전히 몇 가지 한계를 가지고 있다. Fig. 1은 저자들이 수집하고 분석한 데이터를 기반으로 작성된 그림으로, 대한민국 중부 지역(200 × 200 km2)에서 Convolutional Long Short-Term Memory (ConvLSTM; Shi et al., 2015) 모델을 사용하여 딥러닝 나우캐스팅 모델의 주요 한계를 시각적으로 나타낸 것이다. Fig. 1(a)는 모델이 평활화 효과(Smoothing effect, Ayzel et al., 2020)로 인해 강수가 없는 격자에서도 강수를 예측하는 문제를 나타내며, 이는 강수 분포 예측 과정에서 공간적 세분화 부족으로 인해 오·경보율을 증가시키는 원인으로 작용한다. Fig. 1(b)는 좁은 지역에서 단시간 내에 발생하는 대류성 강수 이벤트를 모델이 포착하지 못한 사례로, 2018년 6월 30일 12:10부터 12:40 KST까지 약 30분 동안 관측된 강수 이벤트를 분석한 결과, 관측 강수장이 급격히 변화했으나 모델 예측 결과는 이를 충분히 반영하지 못했음을 보여준다. Fig. 1(c)는 극한 강우와 같은 드문 이벤트에 대해 낮은 예측 성능을 나타내며, 이는 데이터셋에서 극한 강우 이벤트의 비중이 적어 모델 학습이 충분히 이루어지지 못한 것이 주요 원인으로 보인다. 이러한 한계는 딥러닝 기반 강우 나우캐스팅 모델의 성능을 제한하며, 도시 홍수 대응과 같은 실질적 응용에서 중요한 제약으로 작용할 수 있음을 시사한다.
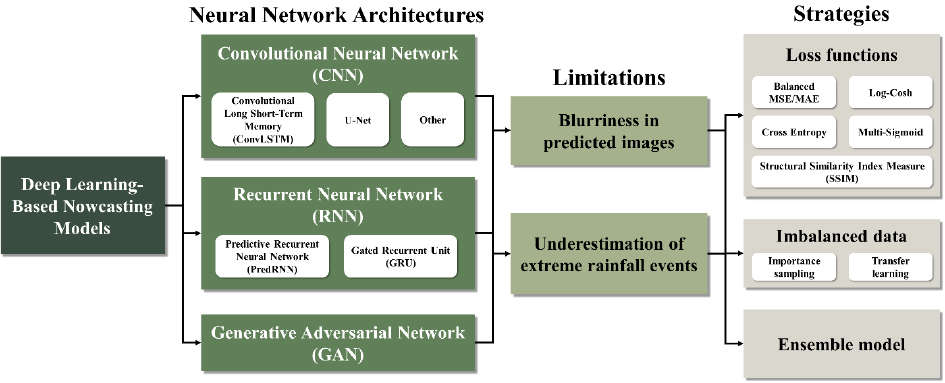
이러한 한계를 해결하고, 딥 러닝 기반 강우 나우캐스팅의 예측 성능을 향상시키기 위해 다양한 연구가 수행되어 왔다. 본 논문에서는 이러한 딥 러닝 기반 나우캐스팅 모델의 최신 연구 동향을 종합적으로 검토하며, 합성곱 신경망(Convolutional Neural Networks, CNN), 순환 신경망(Recurrent Neural Networks, RNN), 생성적 적대 신경망(Generative Adversarial Networks, GAN) 기반의 주요 모델 구조를 중심으로 각 모델의 특징과 도시 홍수 저감에 기여할 수 있는 가능성을 비교 분석하였다. 또한, 예측 이미지의 흐릿함과 극한 강수 이벤트의 과소 예측 등 모델 성능의 주요 제약을 도시 홍수 관리의 맥락에서 구체적으로 논의하고, 이를 해결하기 위한 손실 함수 조정, 데이터 불균형 문제 해결, 앙상블 모델 활용 등의 전략을 다루었다. 더 나아가, 물리적 정보의 통합, 생성적 적대 신경망의 활용, 어텐션 메커니즘 등 도시 홍수 관리에서 나우캐스팅의 실질적 효과를 극대화할 수 있는 미래 연구 방향과 과제들을 제시한다(Fig. 2).
2. 딥 러닝 기반 강수 나우캐스팅 모델의 기본 유형
2.1 합성곱 신경망(CNN) 기반 모델
합성곱 신경망(CNN)은 합성곱(convolution)연산을 통해 지역적 특징을 추출하고 풀링 연산으로 특징 맵의 크기를 줄여 이미지로부터 중요한 정보를 효과적으로 학습한다. 이러한 능력으로 인해 CNN 기반 모델은 레이더 에코 이미지에서 공간 패턴을 분석하고 예측하는 나우캐스팅에 널리 사용된다. 합성곱 신경망을 기반으로 하는 모델은 세 가지로 분류될 수 있으며, Table 1에는 인기 있는 CNN 기반 모델의 주요 특성과 성능이 요약되어 있다.
Table 1.
Summary of CNN-based deep learning models discussed in the paper
| Author | Coverage |
Model (Referenced Models) | Resolution | Leadtime | Performance | ||
| CSI (Threshold)↑ | POD (Threshold)↑ | MSE↓ | |||||
| Shi et al., 2015 | Hong Kong | ConvLSTM | 2km | 90min | 0.577(0.5 mm/h) | 0.660(0.5mm/h) | 1.420 |
| Ayzel et al., 2020 | Germany | Rainnet | 1km | 60min |
0.64(0.125 mm/h) 0.50(1 mm/h) 0.2(5 mm/h) 0.04(10 mm/h) 0.01(15 mm/h) | - | - |
| Bouget et al., 2021 | France | (U-Net) | 1km | 60min | - | - | - |
| Han et al., 2021 | China | (U-Net) | 1km | 30min |
0.54(20 dBZ) 0.39(30 dBZ) 0.29(40 dBZ) |
0.74(20 dBZ) 0.67(30 dBZ) 0.51(40 dBZ) | - |
| Geng et al., 2023 | China | LSTMAtU-Net | 1km | 60miin |
0.4455(0.005 mm/6min) 0.3267(0.2 mm/6min) 0.1908(0.5 mm/6min) |
0.7766(0.005 mm/6min) 0.6662(0.2 mm/6min) 0.4318(0.5 mm/6min) | - |
| Tan et al., 2024a | China | DR2A-UNet | 1km | 120min |
0.59(20 dBZ) 0.26(30 dBZ) |
0.79(20 dBZ) 0.35(30 dBZ) | - |
| Ayzel et al., 2019b | Germany | DozhdyaNet | 1km | 60min | 0.38(1.0 mm/h) | - | - |
2.1.1 합성곱 장단기 메모리(ConvLSTM)
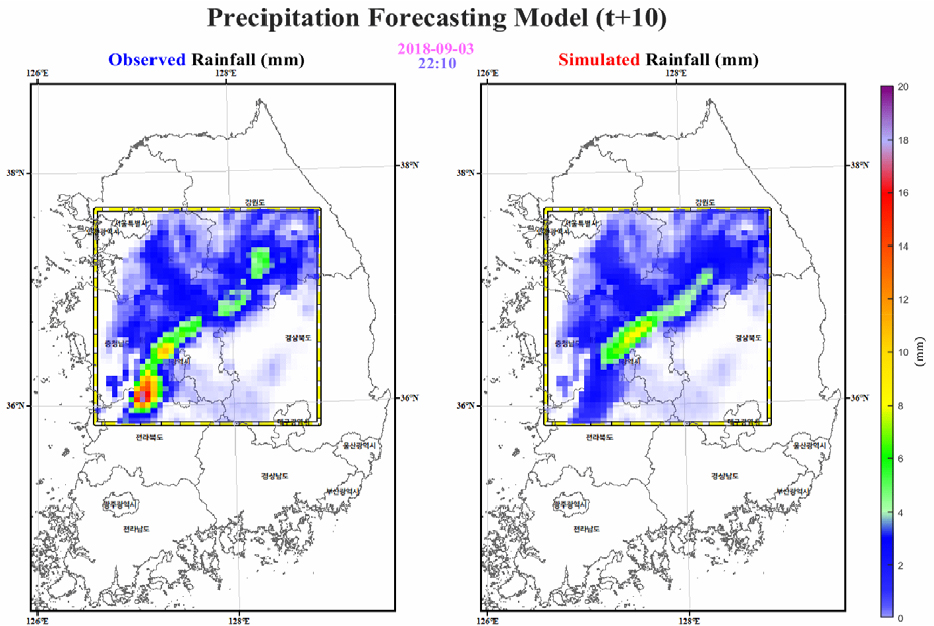
ConvLSTM 모델(Fig. 3)은 Shi et al. (2015)이 개발한 것으로, 전통적인 LSTM의 완전 연결 층을 합성곱 층으로 대체하여 강수 시스템의 시공간 상관관계, 이동, 발달을 더욱 효과적으로 예측할 수 있다. 이 모델은 강수 예측에서 비합성곱 LSTM 및 광학 흐름 기반 알고리즘보다 뛰어난 성능을 보이며, 특히 경계 조건 처리와 복잡한 패턴 학습에 탁월하다(Shi et al., 2015; Kim et al., 2017; Kumar et al., 2020). ConvLSTM은 강수 나우캐스팅에서 딥 뉴럴 네트워크의 선구적인 적용으로 인정받으며, 새로운 DNN 기반 나우캐스팅 모델 개발의 벤치마크 모델로 자주 활용된다. Fig. 4는 저자들이 ConvLSTM 모델을 대한민국 중부 지역에 적용하여 2018년 9월 3일 22:10에 발생한 강수 이벤트를 예측한 결과를 보여준다. 이 그림은 저자들이 수집한 레이더 기반 강수 데이터를 활용하여 ConvLSTM 모델의 예측 성능을 평가한 것으로, 시간적 및 공간적 강우 패턴을 효과적으로 포착할 수 있음을 나타낸다.
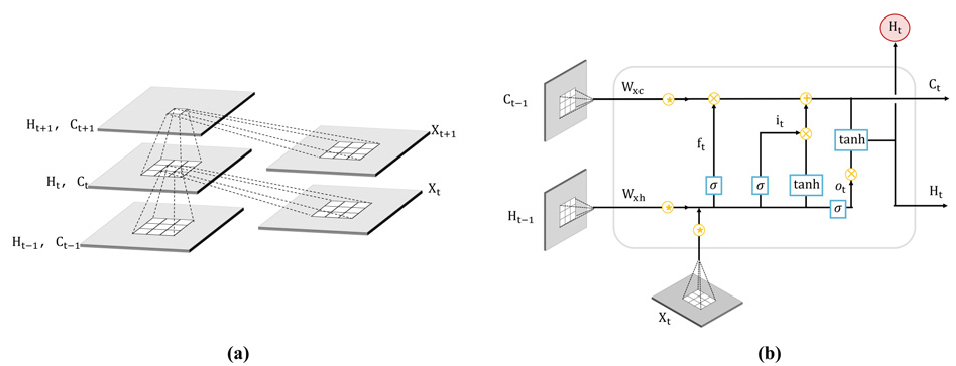
Fig. 3.
(a) Inner Structure of ConvLSTM Model: All inputs (, ), cell outputs (, , ), and hidden states (, , ) are 3D tensors (Shi et al., 2015). (b) Structure of the ConvLSTM cell unit (Shi et al., 2015)
2.1.2 U-Net
U-Net (Fig. 5) 은 Ronneberger et al. (2015)이 개발한 것으로, 이미지 분할 분야에서 뛰어난 성능을 보여주었으며, 현재는 강수 나우캐스팅에도 적용되고 있다. U-Net 모델은 인코더-디코더 구조로 구성되며, 인코더는 이미지의 특징을 추출하고 디코더는 이러한 특징을 기반으로 예측 이미지를 생성한다. U-Net의 핵심 특징은 스킵 연결을 사용하여 인코더와 디코더 간의 정보 전달을 향상시켜 예측 정확도를 높인다는 것이다.
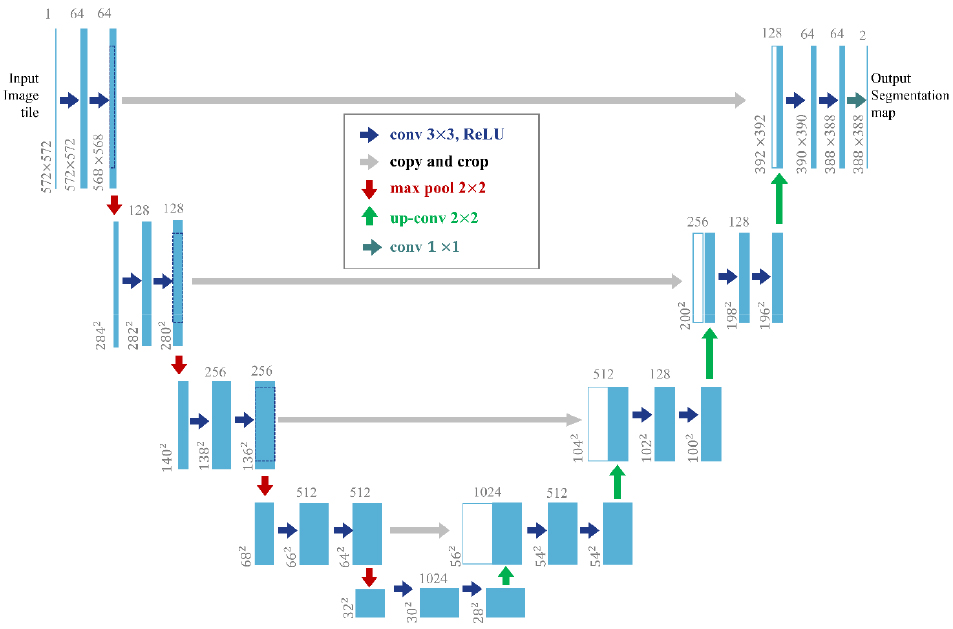
Fig. 5.
Illustration of the U-Net architecture: A convolutional encoder-decoder model with skip connections for rainfall nowcasting (Ronneberger et al., 2015)
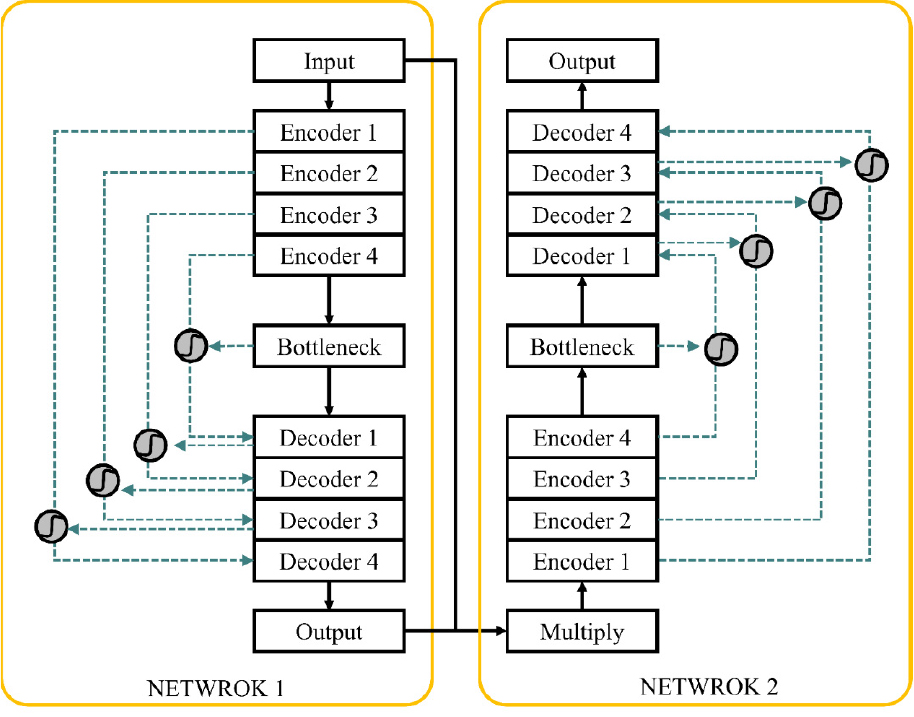
U-Net의 나우캐스팅 적용 사례는 다음과 같다. Ayzel et al. (2020)은 U-Net과 SegNet 아키텍처에서 영감을 받아 RainNet을 개발하였으며, 독일 기상청 데이터로 학습한 이 모델은 최대 60분의 리드 타임에서 최대 5 mm/h의 강수 강도 예측에서 기존 방법보다 뛰어난 성능을 보였다. 그러나 더 높은 강수 강도에서는 공간적 스무딩 효과로 인해 예측 정확도가 낮아지는 한계를 보였다(Fig. 6(a)). Bouget et al. (2021)은 U-Net 모델에 강우 레이더 이미지와 바람 예측을 통합하여 강수 예측 성능을 개선하였다. 이 결합 접근법은 광학 흐름 기반 방법보다 F1 점수가 8% 높고, 레이더 이미지만 사용하는 기존 모델보다 7% 높은 성능을 나타냈다. 특히, 중간 이상의 강수량을 예측할 때 30분 리드 타임에서 우수한 성능을 보였다(Fig. 6(b)). Han et al. (2021)은 U-Net에 CNN 기반 image-to-image 변환 방식을 적용하였다. 이 모델은 balanced root mean squared error와 binary Cross Entropy 손실 함수를 사용해 학습되었으며, Tracking Radar Echoes by Correlation (TREC) 방법보다 우수한 성능을 보였고, RNN 기반 모델인 TrajGRU (Shi et al., 2017)와도 유사한 수준의 성능을 나타냈다(Fig. 6(c)). Geng et al. (2023)은 LSTM 유닛을 U-Net 구조에 통합하고 ECSA (Efficient Channel and Spatial Attention) 모듈을 추가하여 장기 의존성 캡처와 공간적 특징 추출을 강화하였다. ECSA 모듈의 도입은 특히 다양한 강수 임계값에서 모델의 성능을 크게 향상시켰다(Fig. 6(d)). 마지막으로, Tan et al. (2024b)은 U-Net 아키텍처에 순환 잔차 모듈과 어텐션 게이트를 추가한 DR2A-UNet (Double Recurrent Residual Attention Gates U-Net, Fig. 7)을 제안하였다. 이 모델은 강한 강수량 예측의 정확도를 높이기 위해 설계되었으며, U-Net++, ConvLSTM 등 기존 기준 모델을 능가하는 성능을 보였다. 특히, 강한 강수량 예측과 최대 2시간의 긴 리드 타임 시나리오에서도 탁월한 성과를 나타냈다(Fig. 6(e)).
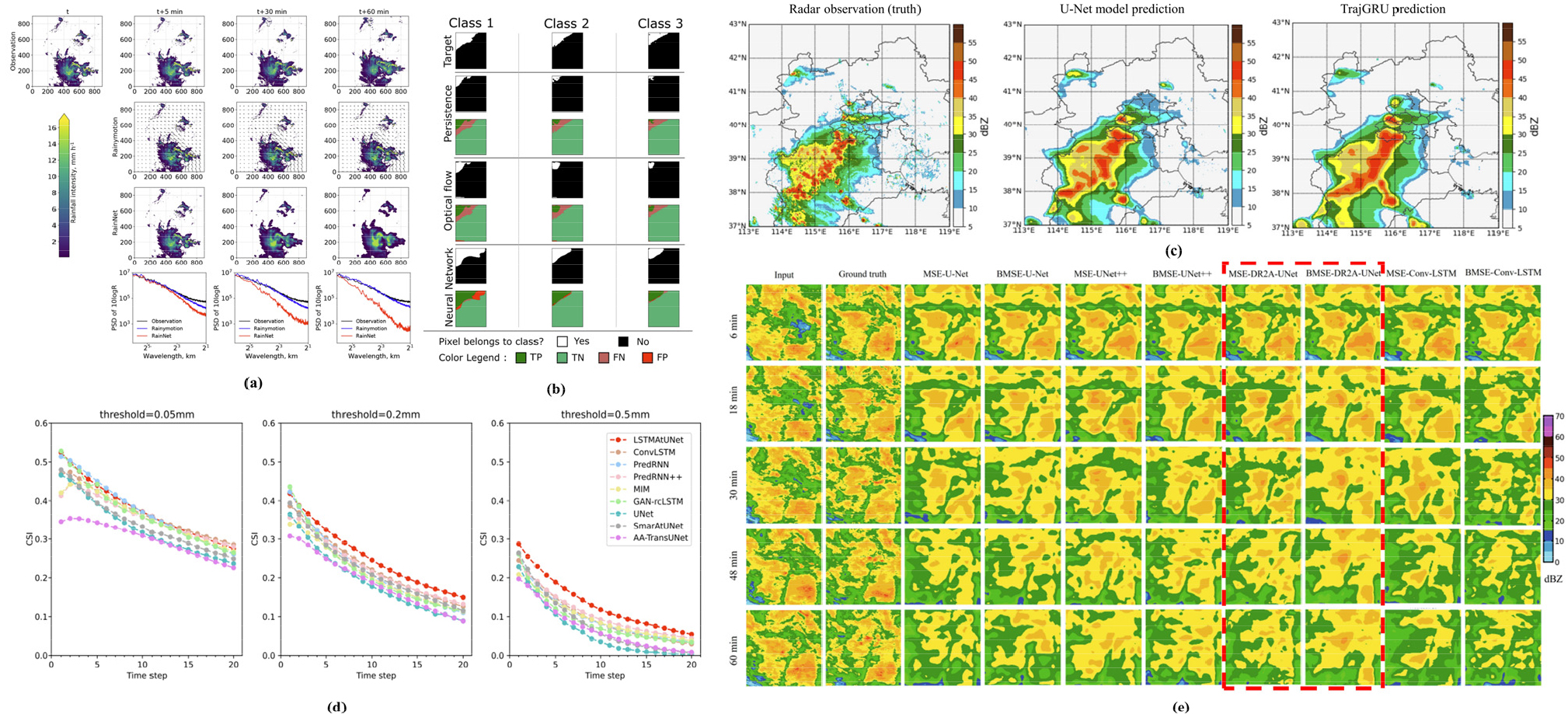
Fig. 6.
(a) Visual comparison of precipitation field for a rainfall event (Ayzel et al., 2020). (b) 30-minute lead time predictions for three rainfall cases (Bouget et al., 2021). (c) 30-minute forecast results for the rainfall event on 21 June 2017 11:29 UTC (Han et al., 2021). (d) Comparison of Critical Success Index (CSI) values over 2 hours for various thresholds (Geng et al., 2023). (e) Visual comparison of prediction results using multiple models and loss functions (Tan et al., 2024b).
2.1.3 기타 CNN 기반 나우캐스팅 모델
Ayzel et al. (2019b)은 pooling layer 대신 보폭이 증가된 합성곱 레이어를 사용하는 간단한 CNN 모델인 DozhdyaNet을 제안하였다. 독일 기상청의 RY 레이더 강우 데이터를 사용한 이 연구는 다양한 데이터 전처리 기술, 손실 함수 및 커널 크기의 실험적 비교를 포함하였다. 최적의 성능은 Scaler v.4 (0.01을 더한 후 자연 로그를 취함), Log-cosh 손실 함수, 3×3 커널 크기를 사용하여 달성되었다. DozhdyaNet은 Eulerian persistence models를 능가하였고, 광학 흐름 기반 모델인 rainymotion과 유사한 예측 성능을 보였다.
2.2 순환 신경망(RNN) 기반 모델
순환 신경망(RNN)은 LSTM을 포함하여 시퀀스 데이터를 처리하는 데 특화된 딥 러닝 모델로, 이전 시간 단계의 정보가 현재 시간 단계의 예측에 영향을 미칠 수 있다. 이는 시간이 지남에 따라 변화하는 강우와 같은 데이터의 패턴을 학습하고 예측하는 데 특히 효과적이다. 순환 신경망을 기반으로 하는 모델은 두 가지로 분류될 수 있으며, Table 2에는 대표적인 RNN 기반 모델의 주요 특성과 성능이 요약되어 있다.
Table 2.
Summary of RNN-based deep learning models discussed in the paper
| Author | Coverage |
Model (Referenced Models) | Resolution | Leadtime | Performance | ||
| CSI (Threshold)↑ | POD (Threshold)↑ | MSE↓ | |||||
| Wang et al., 2017 | Guangzhou, China | PredRNN | - | 60 min |
0.455(30 dBZ) 0.417(40 dBZ) 0.358(50 dBZ) | - | 39.1 |
| Wang et al., 2022 | Guangzhou, China | PredRNN-V2 | - | 0-2 hours |
0.462(30 dBZ) 0.425(40 dBZ) 0.378(50 dBZ) | - | 36.4 |
| Ma et al., 2022b | Hong Kong | PrecipLSTM | 2 km | 60 min |
0.733(0.5 mm/hr) 0.705(2 mm/hr) 0.611(5 mm/hr) 0.512(10 mm/hr) 0.344(30 mm/hr) | - | 24.618 |
| German | 1 km | 50 min |
0.644(0.5 mm/hr) 0.523(2 mm/hr) 0.367(5 mm/hr) 0.175(10 mm/hr) 0.056(30 mm/hr) | 24.618 | |||
| France | 240 m | 50 min |
0.635(0.5 mm/hr) 0.474(2 mm/hr) 0.309(5 mm/hr) 0.208(10 mm/hr) 0.052(30 mm/hr) | 11.914 | |||
| Brazil | 4 km | 50 min |
0.403(0.5 mm/hr) 0.249(2 mm/hr) 0.145(5 mm/hr) 0.085(10 mm/hr) 0.018(30 mm/hr) | 9.642 | |||
| Ma et al., 2023 | France | MM-RNN | 240 m | 65 min |
0.539(0.5 mm/hr) 0.373(2 mm/hr) 0.201(5 mm/hr) 0.095(10 mm/hr) 0.013(30 mm/hr) | - | 20.022 |
| South Korea | 0.5 km | 2 hour |
0.466(0.5 mm/hr) 0.363(2 mm/hr) 0.151(5 mm/hr) 0.028(10 mm/hr) | - | |||
| Shi et al., 2017 | Hong Kong | TrajGRU | 2 km | 2 hour |
0.5528(0.5 mm/hr) 0.4759(2 mm/hr) 0.3751(5 mm/hr) 0.2835(10 mm/hr) 0.1856(30 mm/hr) | - | - |
| Yao et al., 2022 | South Texas | SaGRU | 1 km | 0-180 min |
0.63(20 dBZ) 0.53(30 dBZ) 0.38(40 dBZ) |
0.96(20 dBZ) 0.93(30 dBZ) 0.76(40 dBZ) | - |
2.2.1 PredRNN
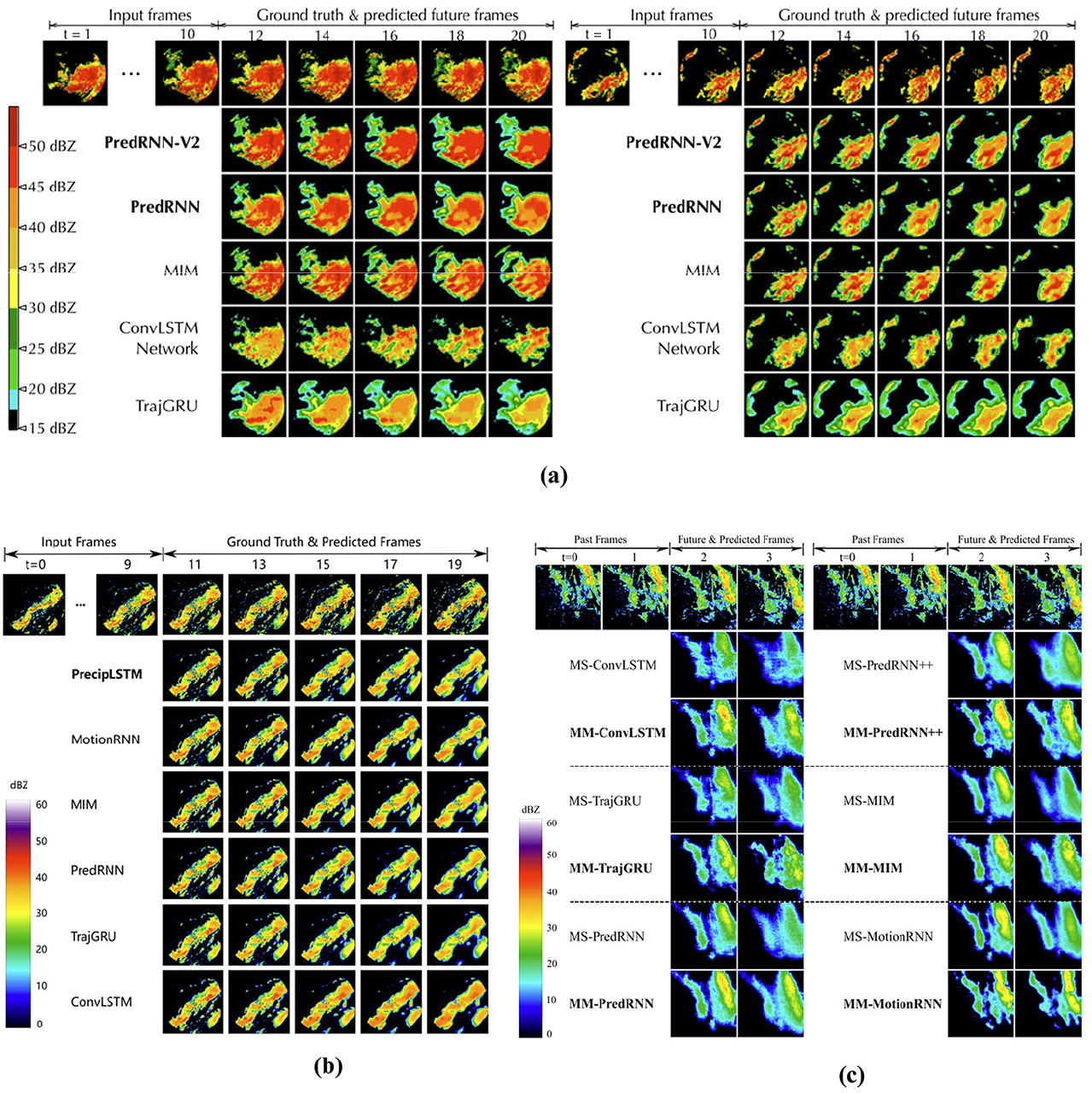
PredRNN (Wang et al., 2017; 2018; 2022)은 시공간 정보를 통합하여 예측하는 LSTM 기반의 시공간 예측 모델이다(Fig. 8(a)). 이 모델은 시계열 데이터의 장기 의존성을 학습하는 데 뛰어나 시공간 강수 패턴을 예측하는 데 특히 효과적이다. 이러한 강점으로 인해 PredRNN은 강수 나우캐스팅 응용에서 만족스러운 성능을 보여주었다(Fig. 9(a)). 예를 들어, Tuyen et al. (2022)은 U-Net과 PredRNN을 결합한 RainPredRNN 모델을 제안하였다(Fig. 8(b)). 베트남 Dien Bien 지역의 레이더 강수 이미지 데이터를 사용한 모델 평가에서, 이들의 모델은 학습 시간을 30% 단축하고 MAC 연산을 절반으로 줄였지만, MAE, SSIM, CSI 등의 지표에서 유사한 점수를 달성하였다. Ma et al. (2022b)은 강수 나우캐스팅을 위한 딥 러닝 모델인 PrecipLSTM을 소개하였는데(Fig. 8(c)), 이는 기존 PredRNN 모델에 Spatial Local Attention Memory (SLAM)와 Time Difference Memory (TDM)라는 두 가지 모듈을 추가하였다. SLAM은 로컬 어텐션 메커니즘을 사용하여 기상 데이터의 공간적 관계를 효율적으로 학습하고, TDM은 연속 프레임 간의 미세한 변화를 캡처하여 구름 이동과 같은 시간적 변화를 효과적으로 모델링한다. HKO-7, DWD-12, MeteoNet, Brasil 등의 데이터셋에 대한 실험에서 PrecipLSTM은 기존 모델을 능가하였으며, 특히 30 mm/h를 초과하는 강한 강우 이벤트 예측에서 탁월한 성능을 보였다(Fig. 9(b)). Ma et al. (2023)은 레이더 데이터뿐만 아니라 온도, 습도, 기압 등 다양한 기상 요소를 활용하는 강수 예측을 위한 딥 러닝 모델인 Multimodal Recurrent Neural Network (MM-RNN)을 제안하였다(Fig. 8(d)). MM- RNN은 두 개의 Multiscale Recurrent Neural Network (MS- RNN)으로 구성되며, 하나는 기상 요소를 예측하고 다른 하나는 레이더 기반 강수를 예측한다. 이 두 모듈은 어텐션 기반 모듈인 Modal Fusion Module (MFM)을 통해 정보를 교환하여 예측 성능을 향상시킨다. 프랑스와 한국의 레이더 및 지상 관측 데이터를 사용한 실험에서 MM-RNN은 전통적인 단일 모달 모델보다 우수한 성능을 보였으며, 극한 강수 예측과 관련된 지표에서 큰 개선을 나타냈다(Fig. 9(c)).
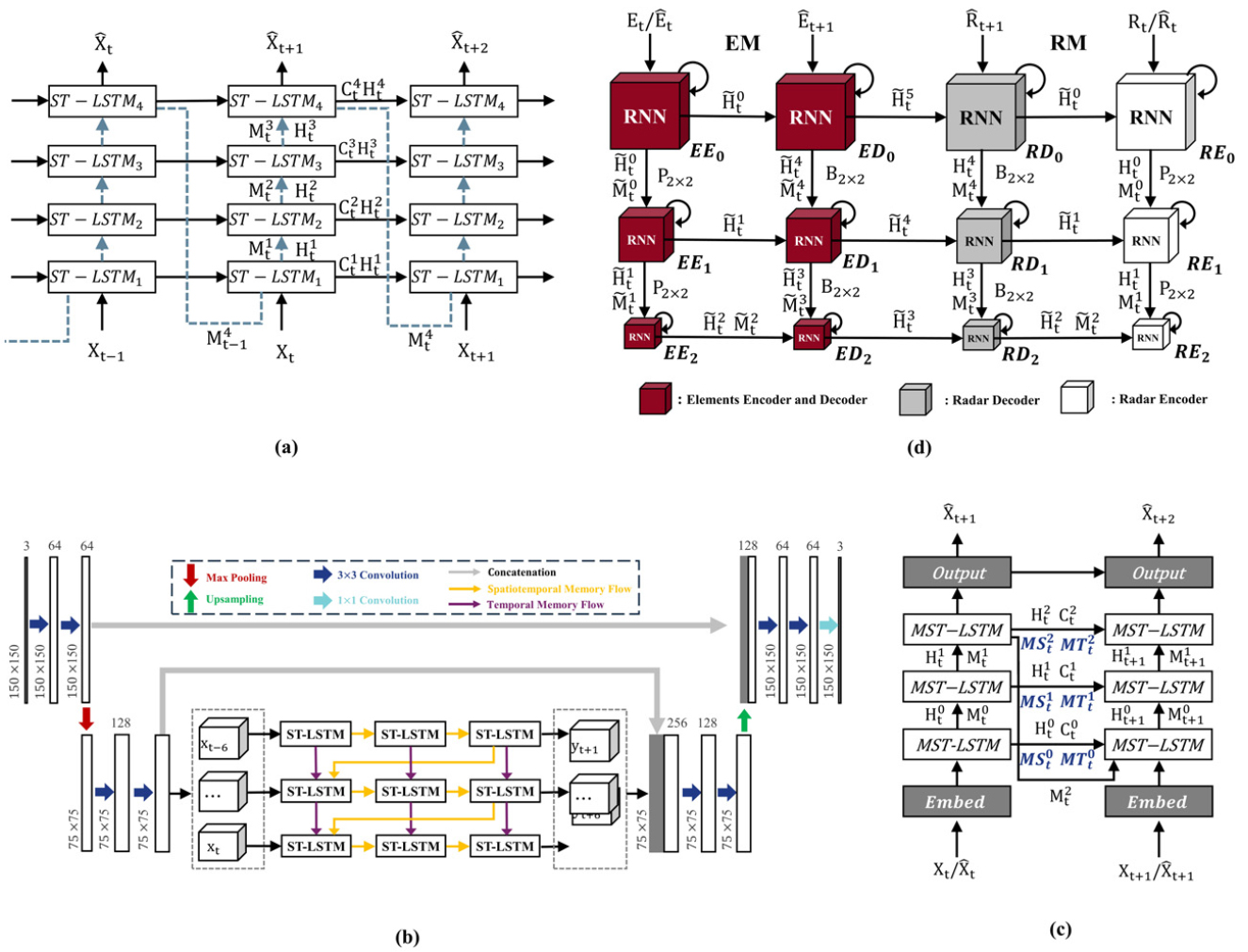
Fig. 8.
(a) Architecture of PredRNN, the blue dotted lines represent the spatiotemporal memory flow (Wang et al., 2022) (b) Structure of RainPredRNN: Integrating spatiotemporal memory of PredRNN with U-Net Encoder-Decoder pathways (Tuyen et al., 2022). (c) Architecture of PrecipLSTM (Ma et al., 2022b) (d) Architecture of MM-RNN: single timestamp prediction (Ma et al., 2023)
2.2.2 게이트 순환 유닛(GRU) 기반 모델
Shi et al. (2017)이 개발한 Trajectory Gated Recurrent Unit (Trajectory GRU) 모델 (Fig. 10(a)) 은 ConvLSTM 모델의 한계를 극복하기 위해 공간적으로 가변적인 순환 연결을 학습하도록 설계되었다. 이 모델은 각 위치와 시간에 대한 로컬 연결 구조를 학습하여 강수 시스템의 이동과 변화를 효과적으로 캡처하며, 강수 시스템의 동역학을 모델링하는 능력을 향상시킨다. 홍콩의 강수 데이터를 대상으로 한 첫 번째 벤치마크 연구에서(Shi et al., 2017), TrajGRU 모델은 다양한 강우 임계값(0.5 mm/h, 2 mm/h, 5 mm/h, 10 mm/h, 30 mm/h)에서 다른 딥 러닝 모델(ConvGRU, DFN, 2D CNN, 3D CNN)과 전통적인 광학 흐름 기반 ROVER 알고리즘보다 높은 CSI와 HSS 점수를 지속적으로 기록하였다. TrajGRU는 강수 시스템의 이동과 진화에 대한 인간의 직관을 통합한 딥 러닝 알고리즘의 선구적인 연구로, 후속 연구에서 ConvLSTM과 함께 벤치마크 모델로 자주 사용된다(Franch et al., 2020; Inoue and Misumi, 2022).
Yao et al. (2022)은 허리케인 관련 강수 예측의 정확성을 향상시키기 위해 셀프 어텐션 메커니즘을 통합한 Self Attention-based GRU (SA-GRU) 모델 (Fig. 10(b))을 개발하였다. 셀프 어텐션 메커니즘은 데이터의 다양한 부분에 다른 가중치를 부여하여 발달하고 이동하는 비구름과 같은 입력 데이터의 중요한 특징에 집중할 수 있게 한다. SA-GRU는 전통적인 모델보다 우수한 성능을 보여 허리케인과 관련된 극한 강수 예측에서 탁월한 성능을 나타냈다.
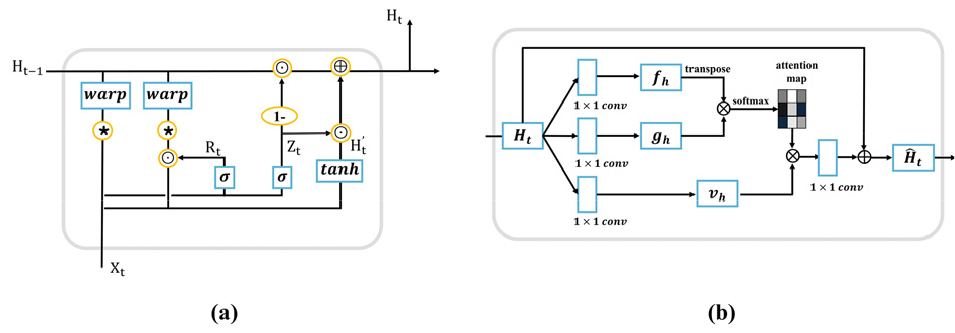
Fig. 10.
(a) Structure of Trajectory Gated Recurrent Unit (Trajectory GRU) (Shi et al., 2017) (b) Self Attention-based GRU (SA- GRU) model structure (Yao et al., 2022)
2.3 생성적 적대 신경망(GAN) 기반 모델
생성적 적대 신경망(GAN)은 최근 강수 나우캐스팅 분야에서 강력한 도구로 부상하였다. 이러한 모델은 생성자와 판별자라는 두 가지 주요 구성 요소로 이루어지며, 생성자는 예측 데이터를 생성하고 판별자는 생성된 데이터가 실제 관측치와 비교하여 얼마나 진짜 같은지를 평가한다. 이러한 상호 작용을 통해 GAN은 예측이 어려운 상황에서도 매우 현실적인 예측을 생성할 수 있다. 또한 동일한 입력 강수 데이터를 기반으로 다양한 잠재적 결과를 시뮬레이션하여 시나리오 기반 불확실성 분석을 가능하게 한다.
Tian et al. (2019)은 강수 예측을 위한 Generative Adversarial Convolutional Gated Recurrent Unit (GA-ConvGRU) 모델을 소개하였다. 이 모델은 생성자와 판별자로 구성된 적대적 학습 시스템으로, 생성자는 ConvGRU 모델(Ballas et al., 2015)을 기반으로 과거 이미지 시퀀스로부터 미래의 레이더 에코 맵을 예측하고, 판별자는 5개의 합성곱 층으로 구성된 CNN으로 생성된 이미지와 실제 이미지를 구별한다(Fig. 11(a)). GA-ConvGRU 모델은 전통적인 ConvGRU 및 광학 흐름 방법보다 우수한 성능을 보였으며, 특히 더 높은 강우 강도에서 더 현실적이고 정확한 예측을 생성하고 흐릿한 이미지나 잘못된 강도 분포와 같은 문제를 극복하였다.
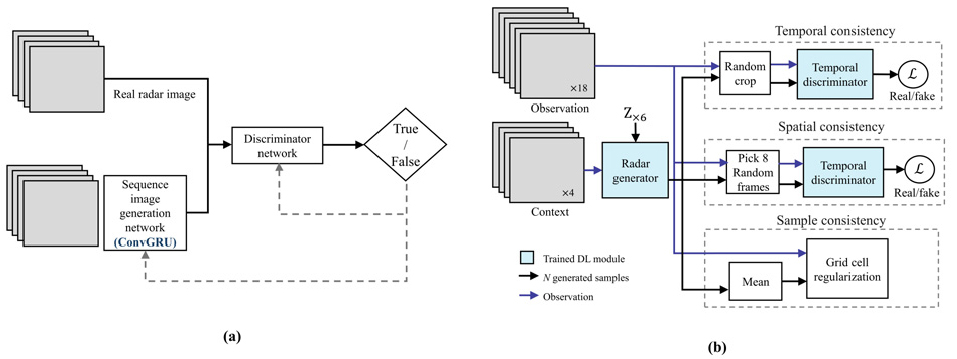
Fig. 11.
(a) Overview of Generator and Discriminator operation in the Generative Adversarial Convolutional Gated Recurrent Unit (GA-ConvGRU) (Tian et al., 2019) (b) Schematic of the Deep Generative Model of Rainfall (DGMR) (Ravuri et al., 2021)
Google DeepMind에서 개발한 Deep Generative Model of Rainfall (DGMR, Ravuri et al., 2021)은 과거 레이더 관측을 사용하여 미래의 레이더 필드를 예측하는 생성자와 생성된 예측의 공간적 및 시간적 일관성을 보장하는 두 개의 판별자로 구성된다. 생성자는 합성곱 GRU를 사용하는 순환 네트워크를 활용하며, 컨텍스트 레이더 데이터와 잠재 가우시안 샘플을 처리하는 잠재 조건 스택을 통합한다(Fig. 11(b)). 이러한 아키텍처를 통해 DGMR은 날씨 예측에 내재된 불확실성을 포착하여 여러 개의 그럴듯한 미래 시나리오를 생성할 수 있다. DGMR의 주요 혁신에는 학습을 안정화하기 위한 스펙트럼 정규화의 사용과 생성된 데이터가 실제 레이더 관측치와 밀접하게 일치하도록 하는 그리드 셀 정규화 항이 포함된다. 이 모델은 강수의 공간적 및 시간적 특성을 유지하는 데 특히 능숙하며, 다른 모델에서 흔히 발생하는 흐릿한 효과를 피한다. 영국과 미국의 방대한 데이터셋으로 학습된 이 모델은 미세한 규모의 강수 특징을 보존하고 정확하고 신뢰할 수 있는 실시간 예측을 제공하여 우수한 성능을 입증하였다. DGMR은 예측 정확도와 예측 불확실성의 정량화 능력 모두에서 PySTEPS (Pulkkinen et al., 2019)와 U-Net 등 기존 방법을 크게 능가하여 운영 기상학에 유용한 도구로 자리매김하였다.
최근 GAN을 강수 나우캐스팅에 더욱 발전시킨 연구로는 다음과 같다. Wang et al. (2023)의 TS-RainGAN은 고해상도 예측을 제공하기 위해 작업 세분화된 GAN을 사용하였다. 이 모델은 흐릿함과 세부 정보 손실과 같은 일반적인 문제를 해결하여 최대 2시간 전의 강한 강우를 예측하는 데 뛰어나다. Ji et al. (2023)의 Convolutional Long short term memory GAN (CLGAN)은 U-Net, ConvLSTM, GAN 아키텍처를 결합하여 강한 강수량을 예측하였다. Yu et al. (2023)의 ConvLSTM-TransGAN은 ConvLSTM을 사용하여 시공간 특징을 추출하고 Transformer 기반 GAN을 사용하여 고해상도 레이더 이미지를 생성하였으며, 특히 극한 기상 현상 예측에서 탁월한 성능을 보이고 예측 이미지의 흐릿함을 줄였다. Ashesh et al. (2022)의 모델은 ConvGRU 유닛에서 생성된 합성 이미지를 구별하는 판별자에 어텐션 모듈을 부착하였다. 제안된 모델은 전선 사례에서 강우대 이동을 효과적으로 추적하고 오후 뇌우 동안 도시의 집중호우에 대한 신속한 경고를 제공하여 0~3시간 나우캐스팅에서 딥 러닝의 잠재력을 강조하였다. Gong et al. (2023)의 AGAN (Attentional Generative Adversarial Network)은 다운스케일링 블록에 합성곱 블록 어텐션 모듈을 부착하여 강수 필드의 공간적 변동성을 캡처하고 재현하는 능력을 향상시켰다. 이들 대표 모델들의 주요 특성과 전반적인 평가 결과는 Table 3에 요약되어 있다.
Table 3.
Summary of GAN-based deep learning models discussed in the paper
| Author | Coverage | Model (Referenced Models) | Resolution | Leadtime | Performance | ||
| CSI (Threshold)↑ | POD (Threshold)↑ | MSE↓ | |||||
| Tian et al., 2019 | Guangdong, China | GA-ConvGRU | 1 km | 60 min |
0.38(0.05 mm/hr) 0.18(5 mm/hr) 0.05(10 mm/hr) 0.02(30 mm/hr) |
0.71(0.05 mm/hr) 0.59(5 mm/hr) 0.49(10 mm/hr) 0.47(30 mm/hr) | - |
| Ravuri et al., 2021 | eastern Scotland | DGMR | 1 km | 30 min |
0.54(2 mm/hr) 0.14(8 mm/hr) | - | - |
| 60 min |
0.50(2 mm/hr) 0.04(8 mm/hr) | ||||||
| 90 min |
0.48(2 mm/hr) 0.02(8 mm/hr) | ||||||
| Yu et al., 2023 | Hong Kong | ConvLSTM-TransGAN | 2 km | 60 min | 0.809 | 244.9 | |
| Gong et al., 2023 | Beijing |
Attentional Generative Adversarial Network (AGAN) | 1 km | 60 min | 0.374(30 dBZ) | 0.721(30 dBZ) | - |
3. 기존 문제 해결을 위한 전략
딥 러닝 기반 나우캐스팅에서 가장 지속적인 문제는 리드 타임이 증가함에 따라 모델 성능이 크게 저하되고, 예측 이미지의 흐릿함, 극한 강수량의 과소 예측이다. 이러한 문제를 해결하는 것이 많은 연구의 주요 초점이며, 일부 연구는 모델 성능 향상에 유망한 결과를 보여주었다. 여기서는 이러한 혁신적인 모델 개선 방법에 초점을 맞춘다.
3.1 손실 함수 조정
딥 러닝 모델 학습은 예측값과 실제값의 차이를 정량화하는 손실 함수가 필요하며, 이를 통해 모델을 최적화한다. 다음과 같은 손실 함수가 주로 적용되었다.
3.1.1 B-MSE/ B-MAE (균형 평균 제곱 오차/평균 절대 오차)
“균형”은 수문학적 재해와 종종 관련된 덜 빈번하지만 더 심각한 레이더 반사도나 강우 강도 값에 더 높은 가중치를 부여하는 것을 의미한다. 대부분의 연구에서 이러한 가중치 값은 유연하게 설정된 계단 함수(Eq. (1))를 사용하여 정의된다. Shi et al. (2017)은 B-MSE와 B-MAE 손실 함수를 사용하면 강수량 예측에서 직접적으로 관련된 것뿐만 아니라 CSI와 HSS와 같은 다른 지표에서도 모델 성능이 향상됨을 보여주었다. Ma et al. (2023)도 극한 강수 예측 성능을 향상시키기 위해 B-MSE를 적용하였다. Franch et al. (2020)은 B-MSE (Eq. (2)) 와 B-MAE (Eq. (3)) 를 결합한 손실 함수를 활용하였으며, 이는 네트워크가 픽셀 수준에서 특정 강우 영역에 집중하도록 학습 프로세스를 미세 조정하는 데 유연성을 제공한다고 주장하였다. 이러한 접근 방식은 조건부 편향을 완화하는 데 도움이 되며, 예측 이미지의 흐릿함을 줄이기 위해 최근 딥 러닝 기반 나우캐스팅 모델에서 일반적으로 사용되는 공간 어텐션 레이어의 개념과 유사하다.
여기서, 는 각 격자에 부여한 가중치이고, 는 강우 강도이다.
여기서, 는 각각 총 프레임 수, 는 총 프레임의 격자 수를 나타낸다. 그리고 는 각각 번째 프레임의 번째 격자에 해당하는 가중치, 관측 값 그리고 예측 값을 의미한다.
3.1.2 Log-Cosh 함수
Log-Cosh 손실 함수는 잔차의 쌍곡선 코사인 로그를 취하며, 작은 잔차에서는 MSE와 유사하고 큰 잔차에서는 MAE와 유사하다. 따라서 극한 값과 일치시키기 위해 모델이 과도하게 보정되는 것을 방지한다. Ayzel et al. (2020)은 Log-Cosh 함수(Eq. (4)) 를 사용하여 MSE 적용으로 인한 문제를 줄였음을 보여주었다.
3.1.3 교차 엔트로피 손실 함수
교차 엔트로피 손실은 예측값이 관측값을 초과할 때, 특히 예측이 1에 가까울 때 매우 작은 손실 값을 부여하고, 예측값이 관측값을 과소평가할 때 훨씬 큰 손실을 부여한다(Eq. (5)). 이는 교차 엔트로피가 실제 이벤트가 발생하지만 낮은 확률로 예측될 때 잘못된 분류에 더 큰 패널티를 부과하기 때문이다. 따라서 교차 엔트로피 손실로 학습된 모델은 관측값을 과소평가하지 않도록 피팅되는 경향이 있어 극한 강수 이벤트를 정확하게 예측하는 데 특히 유용할 수 있다. 그러나 이러한 경향은 작은 값의 과대평가로 이어질 수 있어 강수 예측에서 이미지의 흐릿함을 초래할 수 있다. 나우캐스팅 분야의 초기 연구(Shi et al., 2015; Agrawal et al., 2019)에서 교차 엔트로피 손실 함수가 적용되었지만, 이미지 흐릿함 문제로 인해 널리 채택되지는 않았다.
여기서 와 는 각각 번째 프레임의 번째 격자에 해당하는 예측 값과 실제 값을 의미한다.
3.1.4 멀티 시그모이드 손실 함수
특정 임계값 이상의 강수를 예측하는 모델의 성능을 평가하는 지표인 CSI는 수학적으로 미분 가능하지 않아 손실 함수의 기울기에 의존하는 모델 학습에서 최적이 아닌 결과를 초래한다. 이는 예측 이미지의 흐릿함이나 다양한 강수 강도에서의 불균형한 오류 분포와 같은 문제를 야기한다. 이를 해결하기 위해 Chen et al. (2020)은 CSI를 수학적으로 근사하기 위해 여러 개의 시그모이드 함수를 사용하는 방법을 제안하여 멀티 시그모이드 손실 함수를 만들었다(Eqs. (6a) and (6b)). 멀티 시그모이드 기반 손실 함수로 학습된 그들의 모델은 기존의 구조적 유사도 지수보다 예측 강수 강도 이미지에서 흔히 발생하는 흐릿한 문제를 효과적으로 감소시켰다.
여기서, 는 번째 격자에서 관측된 에코 강도의 스케일링 된 값이며, 는 예측된 에코 강도를 나타낸다. 는 시그모이드 함수의 기울기를 제어하는 스케일 하이퍼파라미터이며, 는 특정 임계값을 의미한다.
3.1.5 구조적 유사도 지수(SSIM)
Tran and Song (2019)은 기존 연구에서 흔히 발생하는 예측 이미지의 흐릿한 문제를 해결하기 위해 SSIM을 딥 러닝 기반 강수 나우캐스팅의 손실 함수로 제안하였다(Eq. (7)). SSIM은 두 이미지 x와 y 사이의 유사도를 측정하며, 밝기 유사도, 대비 유사도, 구조 유사도를 곱하여 계산한다. 각 구성 요소는 0에서 1 사이의 값을 가지며, 1에 가까울수록 더 높은 유사도를 나타낸다. 최종 SSIM 값도 0에서 1 사이이며, 1은 이미지가 매우 유사함을 의미한다. 그들은 기존의 MSE 손실 함수와 함께 SSIM과 MAE를 결합한 새로운 손실 함수를 사용하여 ConvLSTM과 TrajGRU 등의 다양한 기존 모델을 학습시켰다. 이는 예측 정확도를 향상시키고, 기존 모델 및 CSI, FAR, POD와 비교하여 흐릿함 문제를 완화하였다. SSIM은 많은 후속 나우캐스팅 연구에서 널리 활용되었다(Li et al., 2021; Yin et al., 2021).
여기서, 는 예측된 이미지, 는 실제 이미지를 의미하며, 와 는 각각 그 평균값을 나타낸다. 과 은 각 이미지의 분산을 의미하고, 는 두 이미지 간의 공분산을 나타낸다. 과 는 계산의 안정성을 위해 추가된 작은 양의 상수이다.
3.2 데이터 불균형 문제 해결 방안
딥 러닝 기반 강수 나우캐스팅은 관측 데이터를 사용하여 학습하지만, 이러한 데이터셋은 항상 실제 문제를 일으키는 극한 강수 이벤트가 부족하다. 이러한 불균형은 극한 강수의 과소 예측을 초래하며, 더 먼 미래를 예측하기 위해 반복적인 방법을 사용할 때 과소 예측의 규모가 증가한다. 이 문제는 많은 관련 연구에서 지속적인 도전 과제이다(Shi et al., 2017). 이를 해결하기 위해 Ravuri et al. (2021)은 “중요도 샘플링” 방법을 제안하였다. 이 기술은 드문 이벤트에 더 높은 가중치를 부여하여 학습 과정을 조정한다. 이는 모든 강수 이벤트의 확률 분포를 정의하고, 추정된 분포를 기반으로 극한 이벤트를 샘플링하며, 이벤트의 누적 확률 밀도에 기반하여 더 큰 가중치를 부여하는 것을 포함한다. 그들은 중요도 샘플링을 사용하면 극한 강수 예측에 대한 모델의 능력이 향상되어, 전체적인 성능과 중요한 상황에서의 신뢰성을 개선함을 보여주었다. Inoue and Misumi (2022)는 전이 학습 방법을 제안하였다. 일본 전역의 다양한 강우 패턴을 포함한 광범위한 데이터셋을 사용하여 일반적인 강수 경향을 포착하는 기본 모델을 구축하였다. 이러한 모델을 지역 데이터로 미세 조정하여 Transfer model을 생성하였으며, 이는 특히 독특한 기상 패턴이나 제한된 데이터가 있는 지역에서 예측 정확도를 크게 향상시켰다. 이러한 발견은 데이터 불균형으로 인한 문제를 해결하기 위해 다양한 강우 패턴이 있는 지역에서 학습된 모델을 사용하는 것의 중요성을 강조한다. Ko et al. (2022)는 레이더 반사도의 시공간 데이터를 사용하여 더 많은 관측 데이터를 포함한 모델을 초기 학습하고 지상 강우량을 추정하는 전이 학습 접근 방식을 사용하여 이를 더욱 강조하였다. 이 기본 모델을 지상 게이지 데이터로 추가 미세 조정하여 풍부한 관측 데이터와 전이 학습 기술을 통합하면 강수 예측의 정확성과 신뢰성을 크게 향상시킬 수 있음을 보여주었다.
3.3 앙상블 모델
몇몇 연구에서는 단일 모델 사용의 한계를 인식하고 여러 모델의 출력을 결합한 앙상블 모델을 제안하였다. Franch et al. (2020)은 극한 강수 예측을 위한 딥 러닝 모델의 예측 능력을 향상시키는 접근 방식을 제안하였다. 이 연구는 지형 특징과 함께 여러 딥 러닝 모델을 결합하는 model stacking 방법을 사용하여 정확도를 향상시키는 것을 목표로 한다. 구체적으로, 동일한 딥 러닝 모델(TrajGRU)을 다양한 강우 임계값에서 학습하여 앙상블을 형성하는 임계 강우 앙상블 방법을 활용한다. 이 앙상블의 출력을 지형 특징과 결합하여 예측 편향을 줄이고 극한 강수 예측 능력을 향상시키기 위해 Convolutional Stacked Generalization (ConvSG) 모델을 학습한다. 결과적으로 제안된 방법은 극한 강수에 대한 딥 러닝 모델의 예측 정확도를 두 배로 향상시키고, 모든 강우 임계값에서 분석된 다른 모든 방법보다 동등하거나 더 나은 성능을 달성하며, 낮은 강우 임계값에서도 우수한 성능을 유지한다. Amini et al. (2022)는 앙상블 기술인 배깅, 랜덤 포레스트, AdaBoost를 사용하여 다양한 딥 러닝 모델(Stacked LSTM, ConvLSTM 및 그 변형)과 수치 기상 예보(NWP) 모델을 결합한 강수 예측 모델을 제안하였다. 앙상블 모델은 대부분의 강수 이벤트에서 딥 러닝 모델보다 적어도 10% 이상의 정확도 향상을 보였으며, 특히 랜덤 포레스트와 배깅 방법의 효과를 강조하였다. 유역의 반응 시간에 비해 빠른 실행 시간은 실시간 홍수 관리에서 모델의 유용성을 시사한다.
3.4 모델에 인간의 이해 통합
초기 딥 러닝 기반 나우캐스팅 연구는 나우캐스팅을 단순한 image-to-image 변환 문제로 취급하였다. 그러나 강수는 일반적인 image-to-image 예측 모델이 주로 다루는 움직이는 영상과는 다른 고유한 특성을 가지고 있다. 강수는 물리 법칙을 따르므로 모델은 대기 과정의 특정 역학을 고려해야 한다. 최근 연구에서는 이러한 특성을 모델에 통합하여 결과를 개선하였으며, 종종 어텐션 메커니즘을 사용한다. 일부 접근 방식은 다양한 공간 규모에서 발생하는 다양한 대기 과정을 포착하는 데 관련된 다양한 크기의 합성곱 커널을 적용하기도 한다. 이러한 기술은 강수의 시공간 필드의 진화를 더 잘 모델링하여 보다 정확한 예보로 이어진다.
Yao et al. (2022)는 허리케인과 강한 강수와 같은 심각한 기상의 단기 예측을 위한 새로운 방법론을 도입하였다. Self Attention GRU (SaGRU)에 기반한 딥 러닝 모델을 사용하여 장거리 시공간 상관관계를 캡처한다. HSS, CSI, POD, FAR 등의 지표를 사용하여 평가한 결과, SaGRU 모델은 심각한 기상 예측에서 우수한 성능을 보였으며, 특히 다양한 데이터 유형으로 학습했을 때 탁월한 성능을 나타냈다. Ma et al. (2022b)는 PredRNN 프레임워크를 활용하고 두 가지 주요 모듈인 SLAM과 TDM을 통합한 강수 예측 모델 PrecipLSTM을 도입하였다. 이 모델은 적은 수의 파라미터를 사용하면서도 특히 강한 강수 예측과 상세한 예보 프레임 유지에서 우수한 성능을 달성하였다. Li et al. (2023)은 물리 정보를 기반으로 한 딥 러닝 기술을 사용하여 강수 예측을 위한 새로운 모델 LPT-QPN을 개발하였다. 이 모델은 강수의 확산과 이동과 같은 물리적 프로세스에 대한 지식을 통합하여 정확도를 향상시킨다. 이를 위해 유체의 확산과 관련된 수학적 방정식을 사용하여 학습 과정을 안내하여 예측이 물리적으로 의미 있게 한다. 이 모델은 강수 데이터를 이미지로 표현하여 여러 단계를 거쳐 패턴을 학습하고 미래의 강수를 예측한다. 이 접근 방식은 정교한 머신 러닝 기술과 물리 원칙을 결합하여 실제 기상 예보 응용에 유용한 정확하고 효율적인 모델을 만든다. 데이터셋에서 테스트한 결과, 특히 강한 강수 예측에서 좋은 결과를 보였다. Tan et al. (2024a)는 강수 예측을 위한 Multi-Scale Feature Fusion (MFF) 모델을 제시하였다. 이 모델은 다양한 크기의 합성곱 커널을 사용하여 강수 시스템의 형태, 이동, 속도와 같은 다양한 측면을 캡처한다. 모델에는 동적 구름 이동을 캡처하기 위한 3D 다중 스케일 특징 융합 모듈과 특징 상호 작용과 일반화를 향상시키는 2D 다중 스케일 특징 융합 모듈의 두 가지 주요 모듈이 포함된다. 새로운 모델은 높은 탐지 확률, 낮은 오경보율, 시간 전에 강한 강수를 예측하는 능력 등 우수한 성능을 보여주었다. 또한 예보 필드의 스무딩 효과를 개선하였다.
4. 향후 과제
4.1 딥 러닝 모델과 기상 이해의 격차 해소
최근 결과는 딥 러닝 기반 나우캐스팅이 종종 전통적인 수치 예보(NWP) 모델보다 더 정확한 결과를 산출함을 나타낸다. 이는 기계가 인간보다 기상 현상을 더 잘 이해할 수 있다는 대담한 가정을 제시한다. 그러나 이러한 모델에 사용되는 딥 뉴럴 네트워크는 수백만 개의 파라미터로 구성되어 있어 그 물리적 의미를 이해하는 것은 거의 불가능하다. 만약 이러한 파라미터가 나타내는 물리적 의미를 해독할 수 있다면 - 아직 인간이 발견하지 못한 기상 패턴에 대한 통찰력을 제공하는 조합일 수 있다면 - 우리의 기상 현상에 대한 이해가 크게 향상될 수 있다.
4.2 딥 러닝의 실시간 예보 통합과 과제
딥 러닝 기반 나우캐스팅의 잠재력에도 불구하고, 우리는 여전히 그 내부 작동 방식에 대한 이해가 완전하지 않다. 예를 들어, 나우캐스팅이 크게 실패할 때 내부 파라미터를 분석하여 원인을 파악하고 개선을 구현하는 것은 거의 불가능하다. 따라서 딥 러닝 기반 나우캐스팅 시스템은 공공 안전에 중요한 실시간 예보 도구로 거의 구축되지 않는다. 따라서 현재 사용되는 방법과 함께 이러한 시스템을 개발하고 상대적인 강점과 약점을 비교하는 것이 필수적이다. 이러한 반복적인 프로세스를 통해 모델을 개선하고 적용 범위를 확대하여 궁극적으로 공공 안전에 실질적인 혜택을 제공할 수 있을 것이다.
4.3 대규모 나우캐스팅 모델의 개발 및 공유
지난 수십 년간의 ERA5와 NEXRAD와 같은 방대한 데이터셋으로 학습된 포괄적인 딥 러닝 기반 나우캐스팅 모델을 개발하려면 고성능 하드웨어가 필요하며, 이는 종종 개별 연구자나 소규모 기관의 범위를 벗어난다. 따라서 Google이나 중국과학원과 같은 기관이 이러한 모델을 개발하고 공유한다면 전 세계의 지역 실무자들이 특정 지역적 필요에 맞게 이러한 모델을 미세 조정할 수 있을 것이다. 이러한 접근 방식은 고급 나우캐스팅 기술에 대한 접근을 대중화하여 글로벌 기상 예측 능력을 향상시킬 것이다. 이러한 고급 모델을 기존 시스템과 통합하고 점진적으로 개선함으로써 공공 안전에 크게 기여하는 신뢰할 수 있는 실시간 예보 솔루션을 육성할 수 있다.
4.4 도시 홍수 저감을 위한 딥러닝 나우캐스팅 모델의 활용 전략
딥러닝 기반 나우캐스팅 기술은 도시 홍수 저감을 위한 중요한 도구로, 모델 선택과 최적화 전략이 적절히 결합될 때 가장 효과적인 결과를 제공할 수 있다. 본 섹션에서는 딥러닝 모델의 활용 가능성과 도시 홍수 저감을 위한 최적화 방안을 심도 있게 논의한다.
4.4.1 모델 선택의 전략
CNN 기반 모델은 공간적 특징을 학습하는데 강점을 가진다. 예를 들어, DR2A-UNet은 극한 강우 패턴을 예측하는데 특화된 구조를 가져, 특히 강우 이동경로와 강도를 정밀히 파악하여 도시 홍수 위험 지역의 비상 대응 계획을 수립하는 데 효과적으로 활용될 수 있다. DozhdyaNet은 단순한 합성곱 구조를 채택해 계산 자원이 제한적인 환경에서도 높은 효율성과 예측 속도를 제공하여, 초기 대응을 신속하게 지원한다.
RNN 기반 모델은 시간의 의존성을 학습하여 강우의 생성, 이동, 소멸 과정을 모델링 하는데 유용하다. PredRNN은 시공간 메모리 흐름을 활용해 단기 강우 변화에 민감하게 반응하며, 돌발적인 도시 홍수에 대한 대응력을 높이는 데 기여한다. TrajGRU는 공간적으로 가변적인 순환 연결을 통해 비정형적인 강우 이동 경로를 효과적으로 포착하며, 홍수 취약 지역에서 실시간 경고 시스템의 신뢰성을 강화한다.
GAN 기반 모델은 극한 강우 상황의 불확실성을 줄이기 위해 생성자와 판별자의 대립 구조를 활용해 강우 패턴의 다양한 가능성을 반영한 데이터를 생성한다. 특히, DGMR은 강수의 시공간적 특성을 보존하고, 흐릿한 효과를 방지하여 긴 리드 타임에서도 신뢰성 있는 예측을 가능하게 한다. 이를 통해, DGMR은 방재 자원 배치를 최적화함으로써 도시 홍수 피해를 효과적으로 줄이는 데 기여할 수 있다.
4.4.2 딥러닝 모델의 최적화 전략
앞서 논의된 모델의 구조적 강점은 적절한 최적화 전략과 결합될 때 도시 홍수 저감 효과를 더욱 극대화할 수 있다. 손실 함수 조정은 극한 강우 상황에서도 신뢰성 있는 예측을 가능하게 하는데 중점을 둔다. B-MSE와 B-MAE는 과소 예측을 완화하는 데 유용하며, SSIM과 멀티 시그모이드 손실 함수는 예측 결과에서 발생하는 흐림 현상을 줄여 공간적 정확성을 향상시킨다. 이러한 개선은 도시 침수 위험 지역을 보다 정확히 식별하고, 실시간 경고 시스템의 신뢰성을 강화한다. 두번째, 데이터 중심 최적화 접근법은 극한 강우 데이터의 부족 문제를 해결하기 위한 전략이다. 중요도 샘플링은 드물지만 심각한 재난을 일으킬 수 있는 극한 강우에 더 큰 가중치를 부여해 극한 강우 이벤트를 민감하게 학습할 수 있도록 돕고, 전이 학습 기법은 대규모 데이터로 학습된 모델을 특정 지역 데이터로 미세 조정해 지역적 적합성을 강화한다. 이러한 전략들은 돌발 홍수와 같은 극단적 상황에서도 신뢰성 있는 예측이 가능하게 한다. 마지막으로, 앙상블 기법은 다양한 모델의 강점을 결합하여 예측 안정성을 보장한다. 이는 단일 모델로는 예측하기 어려운 다양한 강우 시나리오를 고려할 수 있어 도시 홍수 관리에서 의사결정의 신뢰성을 높이고, 실질적인 대응 계획 수립을 지원한다.
5. 결 론
최근 몇 년간 딥러닝 기반 강우량 예측은 전통적인 수치 기상 예측(NWP) 모델과 외삽 기반 접근 방식의 한계를 극복하는 데 있어 상당한 잠재력을 보여주었다. 본 논문에서는 CNN, RNN 및 GAN 기반의 최신 모델을 체계적으로 분석하여 각 접근법의 고유한 특성과 적용 사례를 조명하고, 도시 홍수 저감을 위한 딥러닝 기반 나우캐스팅 기술의 활용 가능성을 구체적으로 논의하였다. 또한, 손실 함수 조정, 데이터 불균형 문제 해결, 앙상블 모델링, 극한 강우 예측의 불확실성 완화를 위한 물리적 이해 통합 등 성능을 향상시키기 위한 다양한 전략들을 심도 있게 다루었다.
향후 연구에서는 딥러닝과 기상 지식을 결합하여 예측 정확도와 해석 가능성을 동시에 높이는 접근이 중요한 연구 방향이 될 것이다. 특히, 물리적 메커니즘을 반영한 하이브리드 모델의 개발은 복잡한 기상 현상을 이해하고 신뢰할 수 있는 예측을 제공하는 데 핵심적인 역할을 할 것으로 기대된다. 또한, 대규모 딥러닝 모델의 구축 및 공유를 통해 실무자들이 이를 현지 조건에 맞게 조정할 수 있도록 지원된다면, 예측 신뢰성과 운영 효율성이 더욱 향상될 것으로 보인다.
본 논문은 딥러닝 기반 강우 나우캐스팅 기술이 도시 홍수 저감을 위한 실질적인 도구로 자리 잡는 데 있어 주요한 연구 방향과 기술적 과제를 제시하였다. 이를 통해 강우 나우캐스팅 분야에서 이론적 발전과 실제 구현 간의 격차를 해소하고, 연구자와 실무자 모두에게 유용한 참고 자료를 제공함으로써 향후 연구 및 응용의 초석이 되기를 기대한다.
