

1. 서 론
2. 적용모델
2.1 ConvLSTM2D U-Net
2.2 비교 대상 예측모델
3. 자료 구축 및 딥러닝 모델
3.1 자료 구축
3.2 딥러닝 신경망의 최적화
4. 딥러닝 예측모델을 이용한 강우예측 정확도 평가
4.1 학습된 딥러닝 예측모델을 이용한 강우예측
4.2 강우예측의 평가
5. 결 론
1. 서 론
최근 대용량 기상 자료를 저장하고 처리할 수 있는 연산자원의 성능향상으로 신경망 학습을 이용하여 강우예측을 하는 연구가 다양하게 수행되고 있다(Shi et al., 2015; Shi et al., 2017; Reichstein et al., 2019; Tran and Song, 2019; Yoon et al., 2020). 기상자료 중에서 기상레이더 자료는 초단시간 강우예측에 활용되고 있으며, 특히 이미지로 변환이 용이하여 컴퓨터 비전 기반 딥러닝에 활용하기 유용하다. 따라서 레이더 이미지를 RNN (Recurrent Neural Network), CNN (Convolutional Neural Network), ConvLSTM (Convolutional Long Short-Term Memory)에 적용하여 예측강우를 생산하는 연구들이 많이 수행되었다. Shi et al. (2015)는 홍콩의 기상레이더 자료(2011년 ~ 2013년)와 ConvLSTM Network를 이용하여 강우예측을 시도하였다. 해당 구조는 LSTM 내부 오퍼레이션 자체에 convolution을 넣어서 LSTM 셀 자체에서 공간적 의미와 시간적 의미를 포착할 수 있도록 하였다. 이후 Trajectory GRU (Gated Recurrent Unit) 모델을 제안하여 위치-변형 구조를 능동적으로 학습할 수 있도록 하였다(Shi et al., 2017). 최근에는 U-Net CNN을 이용하여 레이더 자료에 인공위성 및 수치예보를 결합하여 강우를 예측하는 연구가 구글에서 수행된 바 있으며, U-Net은 SegNet을 결합하여 CNN 네트워크 기반의 강우예측모델(RainNet v1.0)로 개선되기도 하였다(Agrawal et al., 2019; Ayzel et al., 2020). 이와 같이 국외에서는 레이더 기반 강우예측에서 딥러닝 기술이 이동벡터 추적 및 외삽 기술의 한계를 극복 할 수 있음이 확인되었다. 국내에서는 딥러닝을 활용한 강우예측 연구가 시작 단계이며, 외국에서 구축된 레이더 영상자료를 바탕으로 딥러닝을 수행하여 기법을 개발하기 시작하다가, 기상청 기상레이더 자료를 RainNet 모델에 적용하여 기존 외삽기반 예측기법과의 정확도를 평가한 연구가 있으며(Tran and Song, 2019; Yoon et al., 2020), 최근에는 한국수력원자력(주)(이하 한수원)의 주최로 기상레이더 자료를 활용하여 한강수계 내 주요 수력 댐에 발생하는 강우량을 예측하는 AI 경진대회가 개최된 바 있다(Shin and Yoon, 2021).
본 연구에서는 시계열 순서의 의미가 희석될 수 있는 기존의 U-net 기반 딥러닝 강우예측 모델의 성능을 개선하고자 하였다. 이를 위해 시계열 데이터의 연속성을 고려하도록 ConvLSTM2D 층을 추가한 딥러닝 모델을 활용하여 강우예측을 수행하였다. 산정된 예측강우는 기존 외삽기반의 이류모델 및 RainNet 강우예측 결과와의 비교를 통해 시간 연속성의 고려에 따른 강우예측 정확도 개선 가능성을 검토하였다. 또한 과적합으로 인한 오차를 저감하고자 교차검증을 통한 앙상블 딥러닝 예측 모델 구성하여 예측정확도의 개선정도를 확인하였다.
2. 적용모델
2.1 ConvLSTM2D U-Net
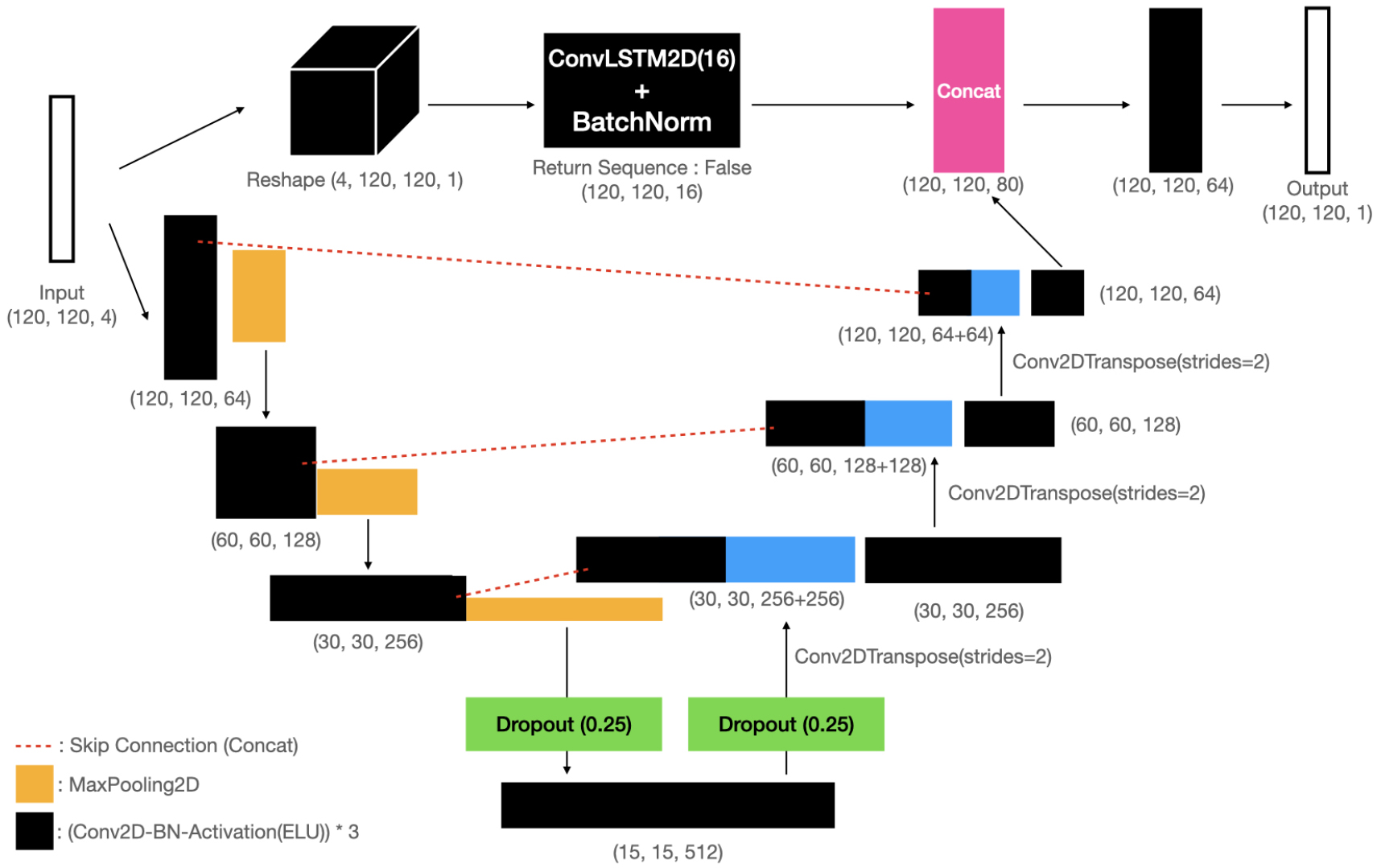
본 연구에서는 딥러닝에 사용된 레이더 이미지 자료의 시계열 연속성을 반영할 수 있도록, U-Net 구조와 ConvLSTM2D의 구조로 학습을 각각 진행하고 최종적으로 이를 합쳐서 Convolution 층을 배치하여 예측하는 모델을 구성하여 사용하였다. 여기서, U-Net은 이미지의 전반적인 특징 정보를 얻기 위한 수축형태(Contracting Path)의 네트워크와 정확한 지역화를 위한 팽창형태(Expanding Path)의 네트워크가 U자형의 대칭 형태를 갖으며, ConvLSTM2D는 시공간적 상관관계를 포착할 수 있는 네트워트 구조로 입력에서 상태로의 전환과 상태에서 상태로의 전환 모두에서 컨볼루션 구조를 갖는다. 해당 모델의 구조는 다음과 Fig. 1과 같다. 본 연구에서 U-Net 구조에 ConvLSTM2D를 추가하게 된 이유는 Convolution 층의 필터끼리는 Dense Layer와 비슷하게 연산되어 시계열 순서가 담고 있는 의미가 희석될 가능성이 있기 때문이다. 추가적으로 기존 RainNet과는 달리 Upsampling 층 대신 Conv2DTranspose를 사용하였는데, Upsampling 층은 적은 해상도를 강제로 고해상도로 올리는 반면 Conv2DTranspose는 학습된 필터를 사용한 convolution연산으로 해상도를 높인다. 또한, RainNet에 있던 과적합을 막기 위해 사용하는 Dropout 위치에는 2차원 전체 특징맵을 제외할 수 있는 SpatialDropout2D을 사용하였다. 학습과정에서 활성화 함수는 Exponential Linear Unit (ELU)를 사용하였다. 특히, 매개변수 수를 줄이기 위해서 필터 256, 512에서는 선형 Bottleneck 구조를 사용했다. Bottleneck 구조는 1×1 convolution으로 차원을 축소하고 3×3 convolution으로 차원을 확대하여 연산한 후, 1×1 convolution으로 다시 차원의 깊이을 깊게 만들어 연산량을 감소시켜주는 효과가 있는 구조이다.
2.2 비교 대상 예측모델
본 연구에서는 ConvLSTM2D U-Net 모델의 정확도 개선효과를 비교하기 위해 기존 외삽기반의 이류모델과 U-Net과 SegNet을 활용한 RainNet 모델을 비교 대상 예측모델로 사용하였다(Yoon et al., 2020).
RainNet은 인코더(encoder)-디코더(decoder) 구조를 가지고 있으며, 풀링을 사용하는 인코더를 통해 공간 해상도를 축소시킨 후 컨볼루션 레이어가 뒤따르며, 다시 디코더를 통해 업샘플링 하면서 높은 공간해상도로 영상의 패턴을 업스케일링 한 후 합성곱 레이어를 사용하게 된다. 또한 다른 레이어들 간의 특징에 대한 의미적 연결을 보장하기 위해 인코더에서 디코더로의 스킵 연결을 포함하고 있다. RainNet은 기상청의 기상레이더 자료를 통해 강우예측을 수행한 사례가 있으며, 해당 연구를 통해 기존 외삽 기반의 예측기법보다 높은 정확도로 강우를 예측한 바 있다. 다만 이미지의 가장자리 특징을 예측하는 합성곱 신경망의 한계로 선행예측시간이 길어질수록 평활화되는 한계가 있다.
이류모델은 Shiiba et al. (1984)에 의해 강우예보의 선행시간 확보를 목적으로 일본에서 개발된 모델로써, Nakakita et al. (1996)과 Sugimoto et al. (2001)에 의해 개선된 바 있으며, 국내에서도 레이더 강우예측을 위해 사용된 바 있다(Yoon and Bae, 2010). 이류모델은 연속적인 시계열 레이더 격자자료를 바탕으로 이류벡터를 계산하고, 현재의 강우강도 분포를 이류벡터에 따라 이동시키면서 강우의 발달․쇠약․회전 등을 고려하여 강우를 예측한다. 해당 모델은 과거의 이동특성(이동 방향 및 강도)을 변화없이 유지하기 때문에 강우량의 변화를 민감하게 예측할 수 없고, 강우 이동 위치의 편차가 크게 발생할 수 있는 한계가 있다.
3. 자료 구축 및 딥러닝 모델
3.1 자료 구축
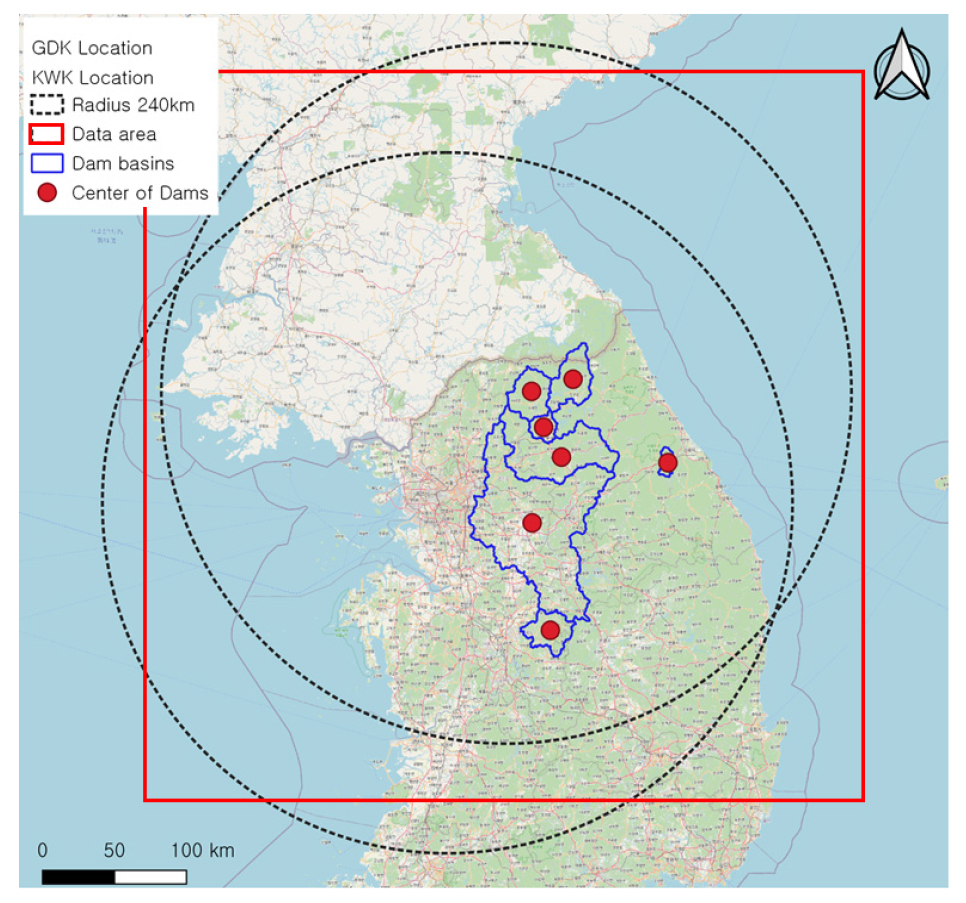
본 연구에서는 레이더 관측 반경이 한수원의 한강수계 내 댐 유역을 포함하는 기상청의 관악산 및 광덕산 기상레이더 2대로 관측된 자료를 합성하여 사용하였다. Fig. 2는 관악산과 광덕산 기상레이더의 위치와 레이더 자료 제공영역(빨간색 상자)을 표기한 것으로, 수력 댐 유역(파란색 선) 상에 표시된 빨간색 원은 각 수력 댐별 자기유역의 중심을 표기한 것이다. 자료 기간은 2010년부터 2017년 중 강우가 발생한 기간의 자료를 사용하였다. 해당 자료는 레이더 원자료의 복잡성과 용량을 고려하여 레이더 자료를 학습에 활용하기 편하도록 다차원 배열 라이브러리(NumPy) 데이터 구조로 변환되었다. 우선 3차원 볼륨자료 형태의 레이더 원자료를 2차원의 평면좌표계의 1.5 km 고도를 갖는 격자자료로 변환하고, 레이더 관측 변수 중 반사도(dBZ) 자료를 0에서 255의 값을 갖는 그레이스케일의 이미지 자료로 변환한 후 다시 수치 배열로 저장하였다. 자료의 시간 해상도는 10분 간격이며, 공간 해상도는 4 km로 격자 배열은 120×120이다. ConvLSTM2D U-Net 모델과 RainNet 모델의 학습을 위해 사용된 데이터셋은 37,399개(2010년 ~ 2016년)이고, 평가에 사용된 영상은 2,137개(2017년)이다. 각각의 넘파이 파일에는 각 학습자료 시간을 기준으로 t-30분, t-20분, t-10분 및 t분의 레이더 자료가 입력 데이터로, 시간 t+10분의 레이더 자료가 학습의 목표 예측자료로 저장되어 있다.
3.2 딥러닝 신경망의 최적화
본 연구에서는 딥러닝 모델인 ConvLSTM2D U-Net과 RainNet 신경망의 최적화를 수행하였다. 딥러닝 신경망의 최적화를 위해 손실함수(loss function)는 평균절대오차(Mean Absolute Error, MAE)를 사용하였고, 측정함수(metrics)는 강우량에 대한 오차와 정확도로 평가하기 위해서 Z=200R1.6을 이용하여 강우강도로 변환 후 학습하였다. 예측강우장이 생성된 후 예측시점의 레이더 관측강우장과의 편차를 나타내는 손실함수를 계산한다.
여기서, nowi와 obsi는 i 위치의 예측 및 관측강우강도(mm/hr)이며, n은 레이더 격자 수이다.
또한, 손실함수를 최소화하면서 딥러닝 모델의 매개변수를 갱신하기 위해 Adam optimizer를 사용하였으며, Adam optimizer의 학습률은 1e-04, 다른 매개변수는 Kingma and Ba (2015)가 제시한 기본 값을 사용하였다. 추가적으로 학습과정을 단일모델과 교차검증을 통한 앙상블모델로 구분하여 ConvLSTM2D U-Net과 RainNet 신경망을 각각 학습하였다. 학습에 사용된 자료는 2010년부터 2016년 동안의 37,399개 레이더 이미지 자료이며, 이중 임의로 학습과정에 사용되지 않도록 20%를 추출하여 학습된 모델의 검정에 사용하였다. 본 연구의 딥러닝 신경망은 케라스(Keras) 프레임워크를 사용하였으며, 구글 Colaboratory에서 학습을 수행하였다.
단일모델 학습은 epoch 1000 및 배치크기 2로 수행되었으며, 학습 및 검정에 대한 측정함수를 임계성공지수(Critical Success Index, CSI)와 0.1 mm/hr 이상의 값에 대한 절대평균오차를 사용하였다(Yoon et al., 2020). ConvLSTM2D U-Net은 20 epoch에서 손실함수와 측정함수가 최소화되었으며, RainNet은 16 epoch에서 최소화되었다.
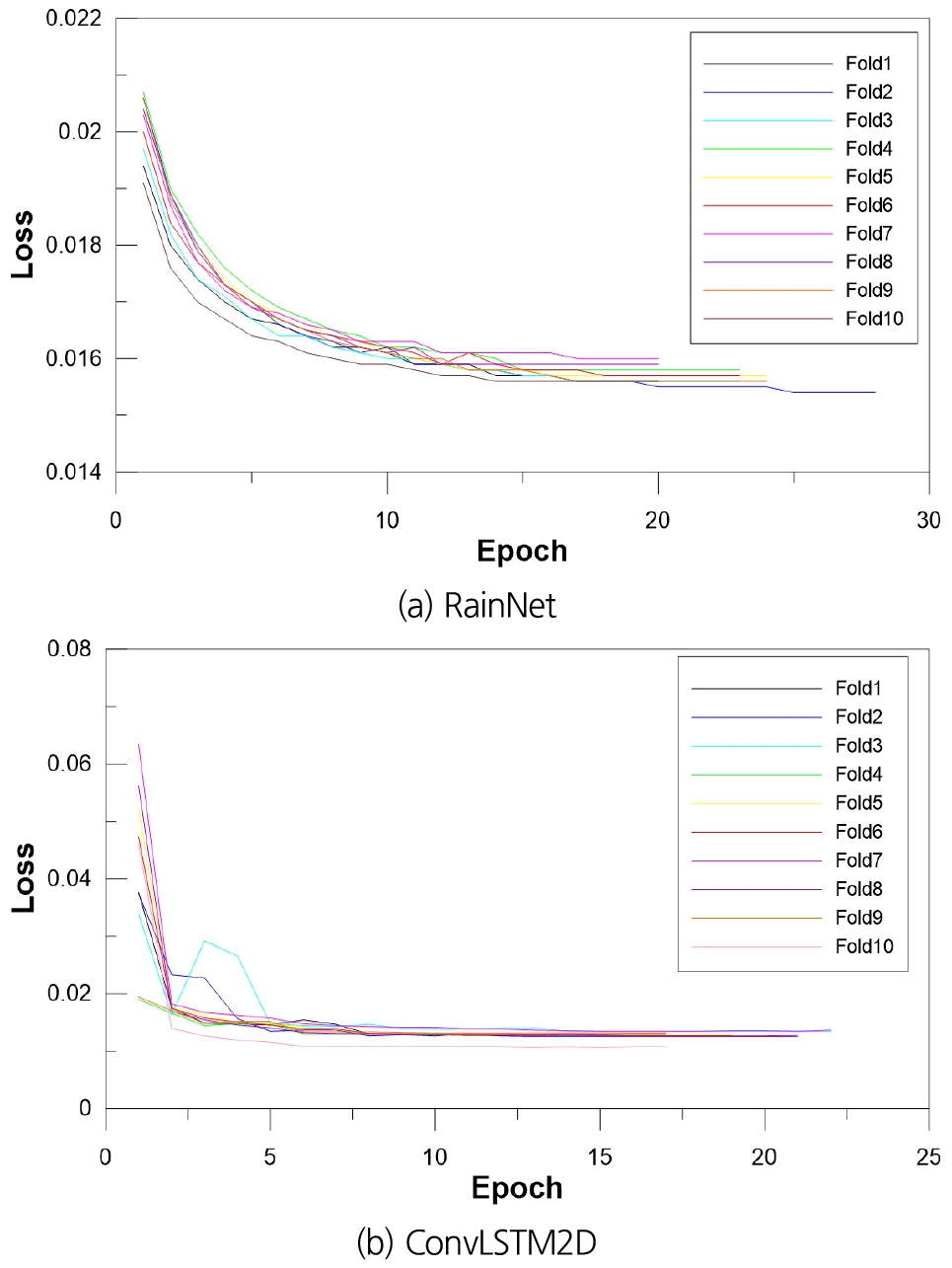
또한 본 연구에서는 모집단 수준으로 많은 데이터를 학습에 사용할 수 없는 환경에서 최대한 다양하게 구현된 모델을 사용하여 과적합을 방지하면서 예측오차를 최소화하기 위해 K-fold 교차검증을 통해 앙상블 모델을 구성하였다. 앙상블 모델 학습은 두 신경망 모두 10 fold 교차검증을 통해 각각 10개의 모델을 학습하였다. 연산시간 최소화를 위해 epoch 100 및 배치크기 64로 수행하였으며, 앙상블 모델 학습시 ConvLSTM2D U-Net은 17 ~ 22 epoch에서, RainNet은 20 ~ 28 epoch에서 최소화되었다. Fig. 3에서 보듯이 딥러닝 학습의 무작위성으로 인해 앙상블 모델 학습 결과는 각 교차검증별 오차변동 및 최소화 시점이 차이가 발생한다. 본 연구의 강우예측시에는 이러한 모델별 오차변동성을 최소화하기 위해 앙상블 모델별 예측의 평균을 사용하였다.
4. 딥러닝 예측모델을 이용한 강우예측 정확도 평가
4.1 학습된 딥러닝 예측모델을 이용한 강우예측
학습된 딥러닝 예측모델들을 이용하여 2017년에 발생한 호우사례 중 2,137개 시점의 자료를 이용하여 강우예측을 수행하였으며, 기존 외삽기반의 강우예측모델인 이류모델의 예측결과도 상호 비교하였다. 선정된 호우사례는 Yoon et al. (2020)에서 적용한 사례와 동일하며, 국지성, 전선성, 층운형 호우 등 다양한 호우특성을 갖고 있다. 학습된 딥러닝 예측모델의 최적화된 가중치를 이용하여, 모델 객체의 predict 메서드를 사용하여 예측을 수행하였다. 특히 본 연구에서는 U-Net을 기본으로 사용하면서 시간연속성을 고려하도록 구성된 신경망 구조의 예측성능을 평가하는 것이 주목적이기 때문에, 각 딥러닝 예측모델이 10분 선행 예측강우에 대해 학습된 모델인 점을 고려하여 10분 예측성능을 평가하였다.
딥러닝 예측모델은 연속된 4개의 이미지를 입력으로 사용하여 10분 선행 예측강우를 생산한 반면, 이류모델은 연속된 3개의 레이더 관측자료를 사용하여 10분 선행 예측강우를 생산하였다. 각 예측모델을 이용하여 산정된 예측강우들 중 일부 사상을 선정하여 예측강우 결과를 표출하고 관측 강우장과의 편차 분석을 수행하여 정성적으로 확인하였다.
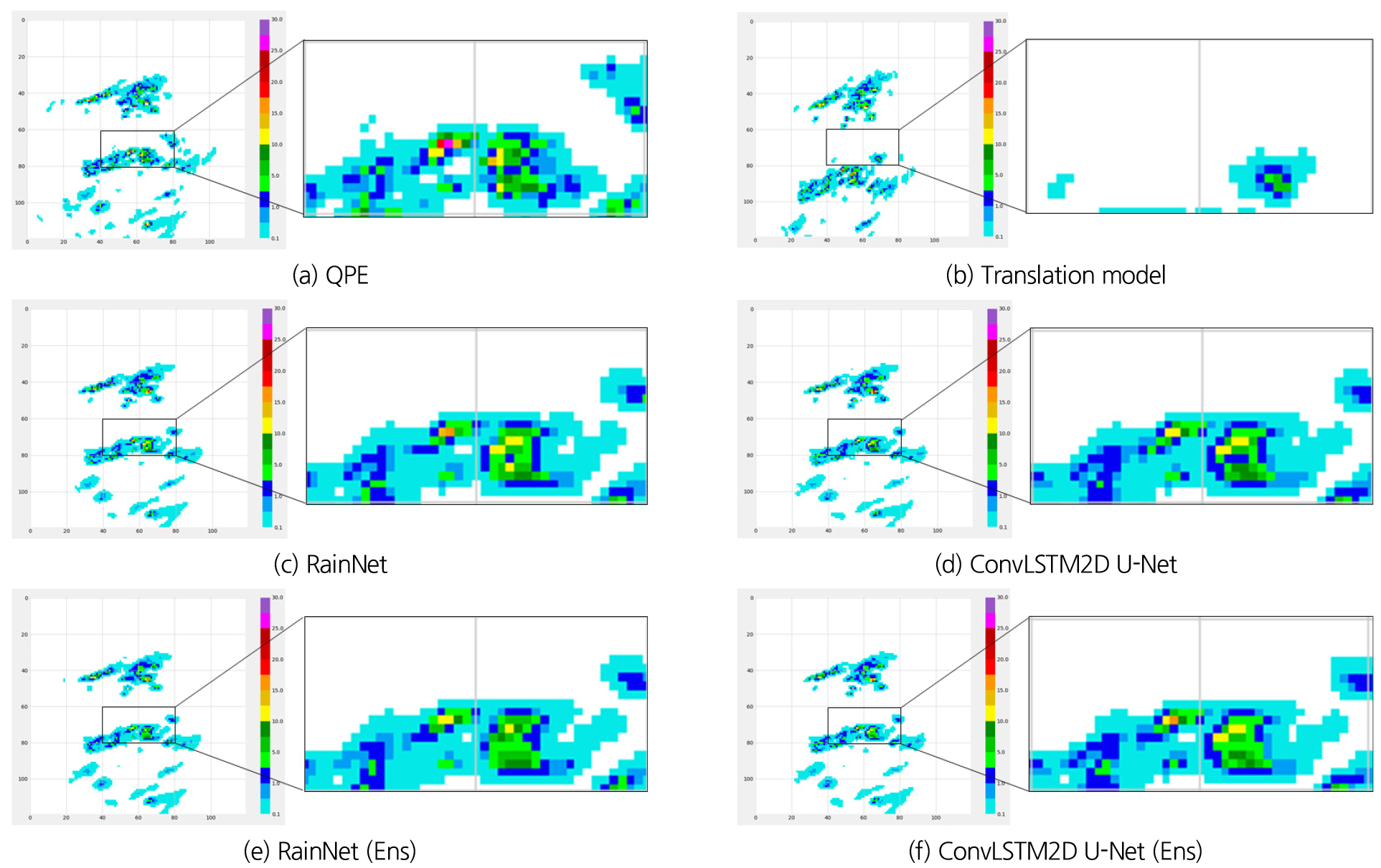
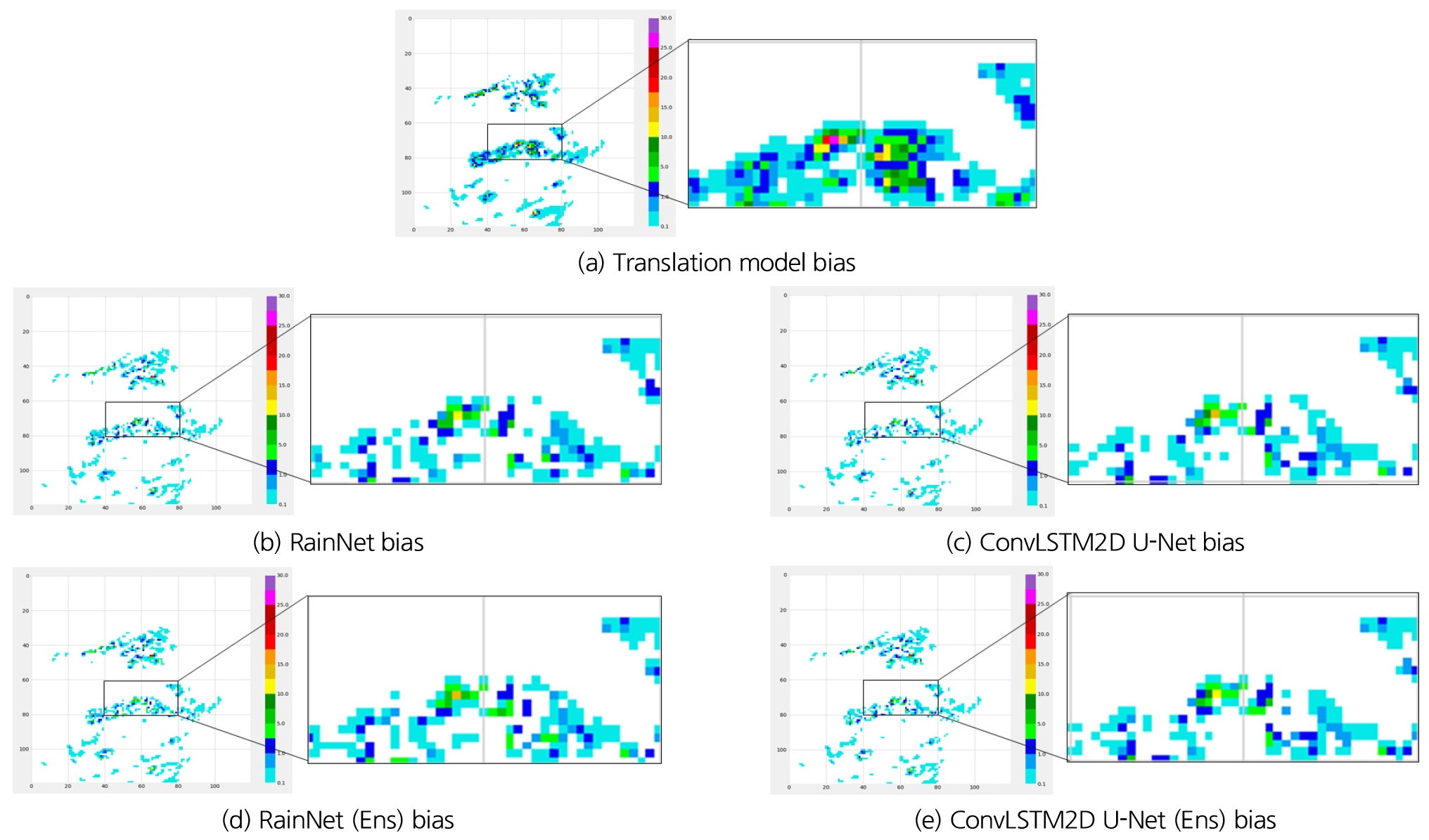
다음 Fig. 4는 2017년 7월 3일 14:40 시점을 기준으로 생산된 예측강우와 관측강우를 함께 표출한 것이며, Fig. 5는 관측강우와 각 예측강우의 편차를 나타낸 것이다. 해당 시점은 중부지방에 장마전선으로 인한 강한 띠형의 강우가 발생한 사례로서, 중부지방에 발생한 띠형의 강우를 박스로 표시하고 확대하여 함께 나타냈다. Figs. 4(b) and 5(a)와 같이 이류모델은 강우예측의 경우 전선이 위로 이동하는 것을 예측하지 못하여 강우 띠가 실제보다 아래로 이동하는 것으로 예측하였다. 딥러닝 강우예측의 경우 모두 실제 관측에 비해 강우강도가 다소 약하게 추정되었으나, RainNet 예측강우보다 ConvLSTM2D U-Net의 예측강우가 오차가 작았다. 동일한 신경망구조를 사용하는 경우는 단일이나 앙상블 모델에 따른 변화를 도식적으로 파악하기 어려울 정도로 유사한 강우 분포를 보였다.
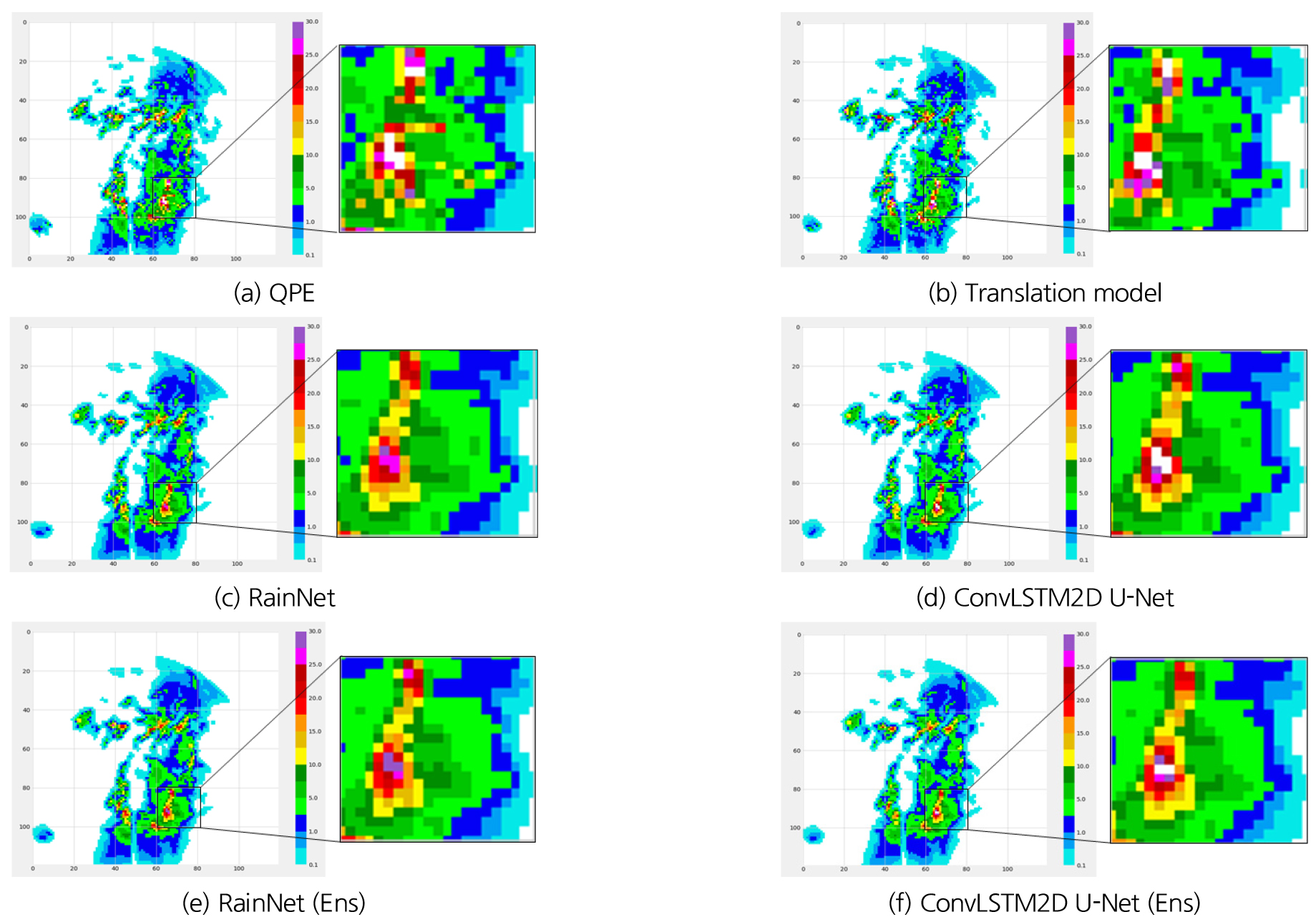
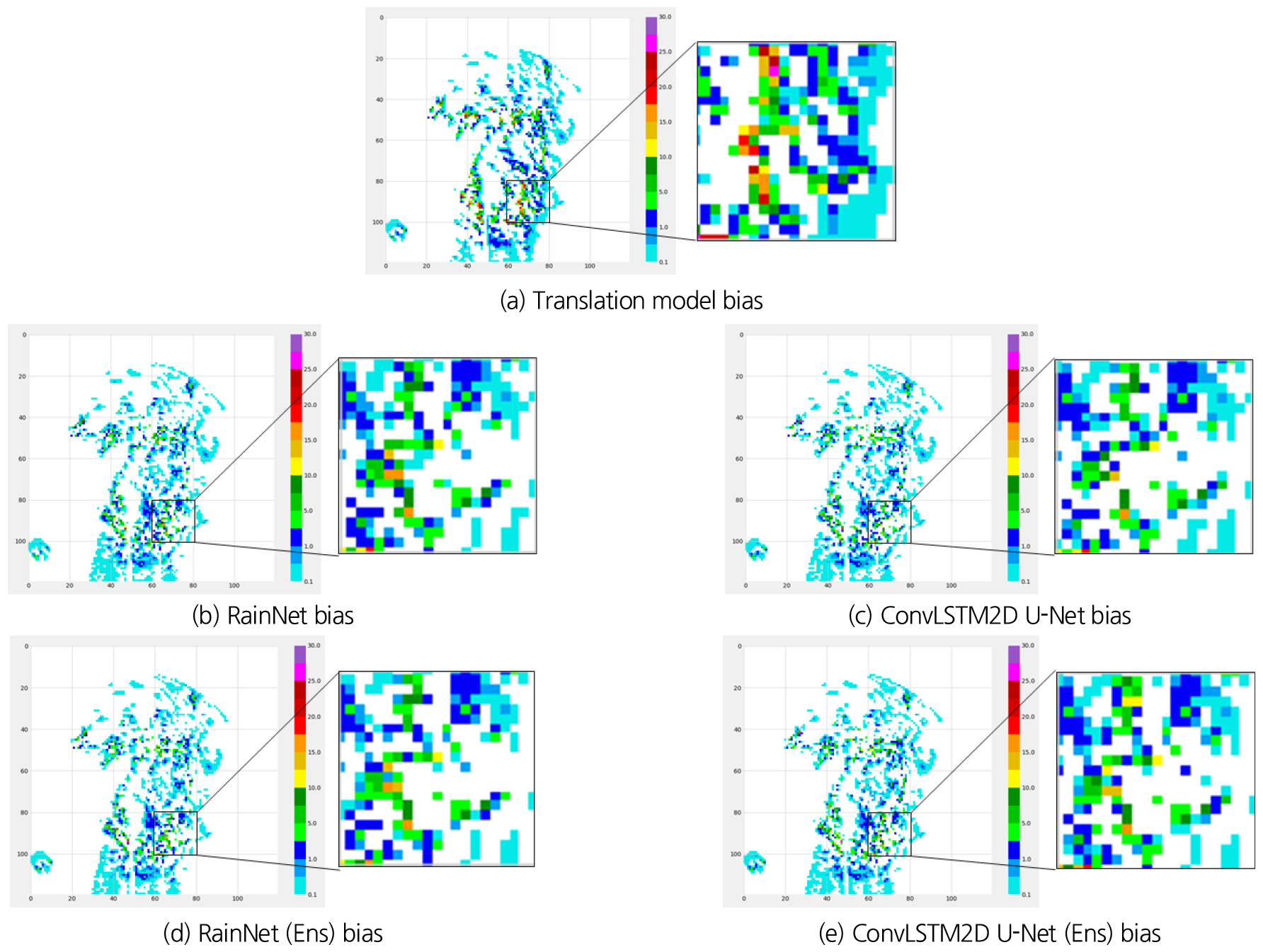
한편, Fig. 6은 2017년 7월 8일 17:50 시점을 기준으로 생산된 예측강우와 관측강우를 함께 표출한 것이며, Fig. 7은 관측강우와 각 예측강우의 편차를 나타낸 것이다. 해당 시점은 장마기간 중 한반도에 전체적으로 강우가 발생한 사례로서, 딥러닝 기반 예측 모델들의 결과는 육안으로 뚜렷한 차이를 확인하기는 힘드나 ConvLSTM2D U-Net을 사용하였을 때 예측 오차의 크기가 작고, 강우 이동 위치를 상대적으로 정확히 구현하였다.
4.2 강우예측의 평가
산정된 예측강우의 평가는 전체 강우장 영역에 대한 정성적 평가를 위해 CSI와 특정 지점에서의 정량적 평가를 위해 MAE를 사용하였다. CSI는 정확히 예측했던 사건수를 예보나 관측시 사건 발생과 관련된 총수를 합하여 나눈 것으로, 퍼펙트 스코어는 1이 되며 강우 발생 및 예측 상황에 대한 분할표를 통해 산정할 수 있다. 정량적 평가는 전체 격자에 대한 MAE와 한수원 수력 댐 자기유역의 중앙에 위치한 7개 격자점(Fig. 2의 빨간색 원)의 예측강우와 관측강우의 MAE를 기준으로 하였다. 본 연구에서는 CSI 및 MAE를 계산 시 강우 현상에 대한 평가를 위해 강우 유무를 판별하는 기준 강우량인 0.1 mm/hr (전도형 우량계의 최소 관측분해능)을 임계 강우강도를 적용하였다.
다음 Fig. 8은 이류모델, 단일 및 앙상블 RainNet, 단일 및 앙상블 ConvLSTM2D U-Net 모델을 이용한 2,137개의 예측시점에 대한 예측 결과의 CSI를 box plot으로 도시한 것이다. 이류모델의 경우 CSI의 최대값과 최소값의 범위가 매우 커 예측 시점별로 예측성능의 변화가 매우 큼을 확인할 수 있다. 딥러닝 예측모델을 사용한 결과는 CSI의 범위가 이류모델에 비해 작으므로 예측시점에 따라 다소 차이는 있지만, 상대적으로 예측성능의 변동성이 작아 안정적인 예측 결과를 제공하는 것으로 판단되었다. 특히 RainNet 신경망 구조를 이용한 예측모델보다는 시간을 변화를 고려하는 ConvLSTM2D U-Net이 CSI의 최대값과 최소값이 차이가 작고, 높은 중앙값을 나타냈다.
Fig. 9는 전체 영역에 대한 예측모델 결과의 MAE를 box plot으로 나타낸 것이다. CSI 결과와 유사하게 이류모델이 가장 넓은 오차 범위를 보여 주었고, RainNet보다 ConvLSTM2D U-Net의 최대 MAE가 작았고, 오차 범위도 좁았다. Fig. 10은 각 수력 댐 자기유역 중앙격자의 예측강우와 관측강우의 평균오차 범위를 나타낸 것으로, 예측 정확도는 예측시점 별로 오차가 크게 나타났다. 여기서는 앙상블 RainNet의 최대 오차가 가장 작았으나 신경망 예측모델들의 오차 범위는 대부분 유사하였다. 7개 격자에 대해 산정된 MAE가 전체 영역에 대해 산정된 MAE보다 매우 크게 나타나, 상세한 영역의 강우예측에는 딥러닝을 활용한 강우예측도 한계가 존재함을 확인하였다. 또한, 단일 모델과 앙상블 모델 사용에 따른 정확도의 차이는 크게 나타나지 않았으나, 신경망 구조에 따른 차이는 명확하게 확인할 수 있었다. 특히, 딥러닝 예측 모델은 좁은 오차범위 및 유사한 사분위수 범위를 보여주어 예측시점에 큰 영향없이 안정적인 예측성능을 보인다고 판단된다.
Table 1은 각 예측모델들의 정확도를 수치로 표현한 것이다. 수치적으로 앙상블 ConvLSTM2D U-Net의 평균 CSI가 0.8391로 가장 높은 값을 보였으며, 평균 MAE도 0.066로 가장 작은 오차를 보였다. 댐 유역 중심점 7개의 평균 MAE도 ConvLSTM2D U-Net가 0.2237로 가장 낮게 나타났다.

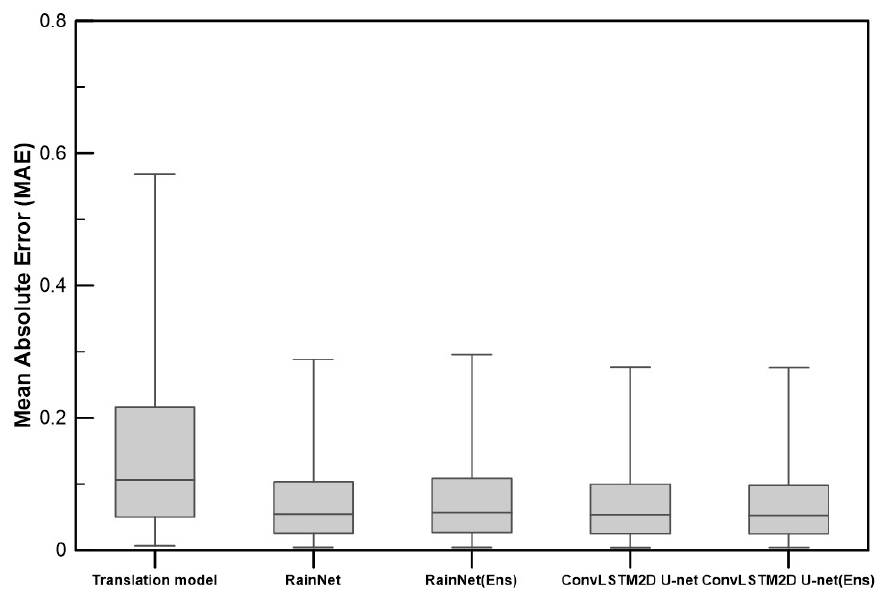
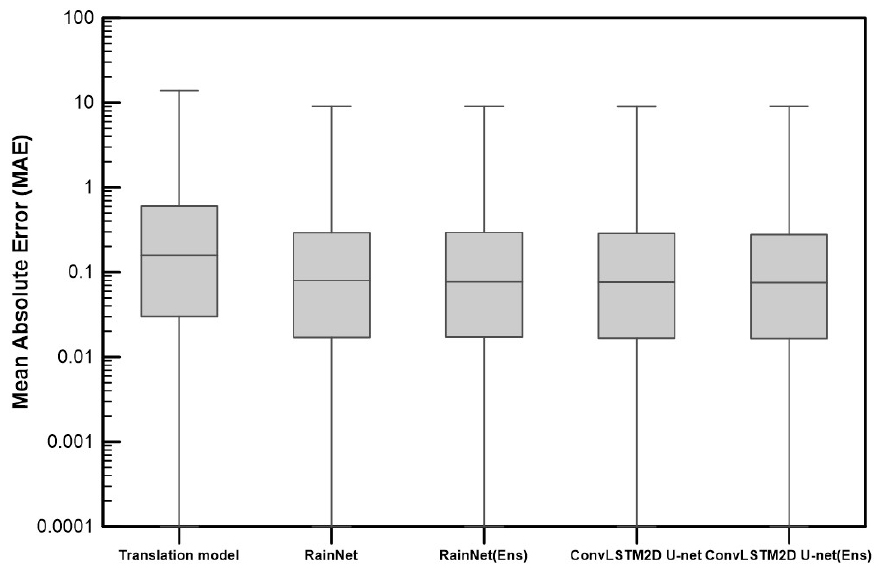
Table 1.
Evaluation of QPF accuracy
5. 결 론
본 연구에서는 기존의 U-net 기반 딥러닝 강우예측 모델의 성능 개선을 위해 시계열 자료의 연속성을 고려할 수 있도록 ConvLSTM2D U-Net 신경망 구조를 활용하였다. ConvLSTM2D를 추가함으로써 Convolution 층의 필터가 Dense Layer와 비슷하게 연산되어 시계열 순서가 담고 있는 의미가 희석되는 것을 보완하고자 하였다. 신경망 구조 변화를 통한 강우예측 성능의 개선을 확인하기 위해 기존 U-net 기반의 RainNet 모델 및 외삽기반의 이류모델을 함께 사용하였다. 또한, 신경망 기반 모델의 학습 시 단일 모델 뿐만 아니라 10개의 앙상블 모델로 학습을 수행하여, 모델 학습과정에서의 불확실성을 개선하고자 하였다. 그 결과, ConvLSTM2D U-Net을 사용하였을 때 예측 오차의 크기가 가장 작고, 강우 이동 위치를 상대적으로 정확히 구현하였다. 또한 앙상블 ConvLSTM2D U-Net이 높은 CSI와 낮은 MAE를 보여 타 기법에 비해 정확하게 강우를 예측하였으며, 안정적인 예측성능도 보여주었다. 다만, 시간의 변화를 고려하기 위한 ConvLSTM2D U-Net 신경망 구조가 예측정확도를 높일 수 있었으나, 여전히 강한 강우영역이나 상세한 강우예측에는 공간평활로 인한 합성곱 딥러닝 신경망 모델의 한계가 있음을 확인하였다. 이러한 한계가 일반적으로 선행예측시간 연장을 위해 재귀적으로 예측모델을 사용할 때 오차를 더 크게 발생시킬 수 있다. 향후 상세 강우예측을 위해서 합성곱 신경망 모델의 공간 평활로 인한 오차를 저감할 수 있는 에지 스무딩(edge smoothing) 기법을 적용하고, 낮은 발생빈도로 인해 강한 강우강도를 잘 반영할 수 없는 한계를 손실함수 연산과정에서 강우강도별 가중치를 적용하거나 호우별 학습을 통해 개선하고자 한다.
