

1. 서 론
2. 상수도 관망 GIS/CAD 데이터 변환 알고리즘
2.1 개발된 알고리즘의 적용에 필요한 자료와 알고리즘의 개요
2.2 노드 설정 알고리즘(알고리즘_1)
2.3 파이프 고유번호를 파이프 상의 정점에 할당하는 알고리즘(알고리즘_2)
2.4 파이프의 교차점에 대한 노드 설정 알고리즘(알고리즘_3)
2.5 파이프의 시점 또는 종점에 밸브의 존재 유무를 설정하는 알고리즘(알고리즘_4)
3. 개발된 알고리즘의 적용 결과
4. 결 론
1. 서 론
상수도 관망은 정수처리된 물을 수요자의 사용처까지 안전하게 수송하는 사회 기반시설로써 국민의 건강과 생산활동에 있어서 필요불가결한 역할을 수행한다. 우리 나라에는 2020년 환경부 통계기준 약 130,522 km의 상수도 배수관이 설치되어 있으며 이중 매설년도가 10년이 넘는 관로는 83,663 km에 달하고 이중 절반가량은 20년이 넘는 관으로 파악되었다. 이렇게 노후된 관들과 허술하게 관리된 밸브와 같은 상수도 관망 부속시설들로 인해 상수도 공급시스템에서 사고가 발생할 경우 그 규모는 2019년에 발생한 인천광역시 붉은 수돗물 사태와 같이 해당 상수도 공급계통 전체로 커질 수도 있다.
관망사고에 의한 수돗물 2차 오염 예방을 위해서는 교차접속 및 역류방지 등 관망시설 설비 정비,2차 소독과 배수세척, 미생물제어, 관로 용출에 기인한 화학물자 관리, 관로부식 관리, 배수지 및 저수조 관리, 정수처리와 급배수관리의 유기적 관계 고려 등을 해야 한다(Jeong, 2000). 이러한 대책들이 효과를 보기 위해서는 관망 사고 발생 시 밸브 차단에 의해 발생하는 관망의 격리구역(세그먼트 및 비의도적 고립구역)을 파악하는 것이 반드시 필요하다(Walski, 1993a, 1993b; Jun, 2006).
상수도 관망의 격리구역을 파악하기 위해 개발된 대표적인 알고리즘은 Alvisi et al. (2011)과 Jun and Loganathan (2007) 및 Li and Kao (2008)과 같은 depth-first와 breadth-first 탐색 알고리즘과 Giustolisi and Savic (2010)와 Creaco et al. (2010)에서 세그먼트에 속하는 노드(node)를 탐색하기 위하여 수리학적 시뮬레이션을 이용하는 알고리즘이 있다. 한편 Park and Kim (2017)은 Giustolisi and Savic (2010)에서 사용된 밸브와 파이프의 위치관계 행렬과 유사한 행렬에 대한 연산에 기반한 세그먼트 탐색 알고리즘을 개발하였다. 최근에는 Hernandez and Ormsbee (2021a; 2021b)의 세그먼트 탐색을 위해 link-node incidence matrix를 사용하고, 비의도적 고립구역 탐색을 위해 link-node incidence matrix를 사용한 연구가 있다.
이러한 관망의 세그먼트를 파악하기 위한 알고리즘을 구동시키기 위해서는 관망의 주요 구성요소들인 절점, 파이프, 및 밸브 간의 상대적인 위치 관계를 세그먼트 탐색 알고리즘의 입력정보로 준비해야 한다. 한편 우리나라에서는 환경부에서 정한 상수도 관망에 대한 기술진단 실시시 관례적으로 관망의 제수밸브들 중 차단된 것으로 확인된 제수밸브들만을 EPANET 등을 활용한 관망 수리해석을 위한 모델링에 포함시키고, 차단된 것으로 확인되지 않은 제수밸브들은 관망 수리 모델링에 포함시키지 않고 있다. 이러한 관행은 관망의 실용적인 수리학적 해석을 위해서는 합리적인 접근방법이 될 수 있으나, 관망의 운영을 고도화하기 위한 관망의 세그먼트를 탐색하는 목적에는 부합되지 않는 것으로 판단된다.
따라서 실제 지방자치단체(지자체) 관망에 존재하는 세그먼트를 보다 정확하게 파악하기 위해서는 관망 수리해석 프로그램 구동을 위해 모델링된 관망 정보를 이용하기 보다는, 모든 제수밸브가 포함된 지자체 상수도 관망 GIS/CAD 데이터베이스를 이용하여 세그먼트 탐색에 적합하게 재구성된 관망 정보를 이용할 필요가 있다. 관망 GIS Shape 파일과 이를 변환한 CAD 파일에는 연결된 파이프들 간의 연결성에 대한 일관된 정보가 존재하지 않으며, 파이프 상에 존재하는 밸브와 관망 격리구역 확인에 필요한 관망의 절점과의 위치관계가 정립되어 있지 않으므로, 관망의 노드-파이프-밸브 간의 상대적 위치관계를 수립하고 이를 관망 격리구역 확인을 위한 알고리즘의 입력 자료로 사용할 수 있도록 하는 알고리즘이 필요하다. 따라서 본 연구에서는 지자체 상수도 관망 GIS/CAD 데이터로부터 관망 세그먼트 탐색에 적합한 노드-파이프-밸브 간의 상대적 위치관계를 수립할 수 있는 컴퓨터 계산 알고리즘을 개발하였으며, 이를 구현할 수 있는 MATLAB 프로그램을 개발하였다. 개발된 MATLAB 프로그램을 국내 지자체 상수도 관망에 적용하여 그 실효성을 확인하였다.
2. 상수도 관망 GIS/CAD 데이터 변환 알고리즘
2.1 개발된 알고리즘의 적용에 필요한 자료와 알고리즘의 개요
우리나라에서 상수도 관망에 대한 정보를 체계적으로 관리하는 지자체에서는 관망에 대한 정보를 지리정보시스템(GIS)으로 관리한다. 지자체 상수도 관망에 개발된 알고리즘을 적용하기 위해 먼저 관망 GIS Shape 파일을 CAD 파일로 변환하여야 한다. 이는 관망의 노드-파이프-밸브 간의 상대적 위치관계 수립에 필요한 파이프 및 밸브에 대한 고유번호(SEQ) 및 파이프의 시점(start point)과 종점(end point) 및 정점(vertex)에 대한 2차원 위치좌표를 GIS Shape 파일로부터 추출하기 위함이다.
관망 CAD 데이터에서 파이프 상의 정점은 연결된 파이프의 각도가 바뀌는 지점, 분기관이 존재하는 지점, 설치년도나 구경 또는 재질 등과 같은 파이프 속성이 바뀌는 지점을 나타낸다. 파이프의 시점은 파이프 선형의 시작점을 뜻하며, 통상적인 유수 방향의 시작점을 뜻한다. 한편 파이프의 시점에서 가장 멀리 떨어진 마지막 정점이 해당 파이프의 종점으로 정의된다. Table 1은 개발된 알고리즘에 사용된 CAD 자료를 나타낸다.
Table 1.
Data used for execution of the developed algorithms
개발된 알고리즘은 순차적으로 수행되는 4개의 하부 알고리즘으로 구성되며, B시 H구 관망 일부분에 적용되어 그 적용성을 분석하였다. 첫 번째 알고리즘(알고리즘_1)은 파이프 상의 시점 및 종점의 2차원 위치좌표를 이용하여 파이프 시점 및 종점에 대해 관망의 노드 번호를 부여하는 알고리즘이다. 알고리즘_1이 처음 실행될 때에는 T-자형 파이프의 분기점에는 아직 정점이 존재하고, 노드로 변환되지 않은 상태이다. 이러한 T-자형 파이프에서 파이프와 파이프가 만나는 지점에 존재하는 정점을 T-정점(T-vertex)이라고 한다. 두 번째 알고리즘(알고리즘_2)에서는 관망의 정점들과 파이프의 연결성을 설정하기 위해 파이프 상의 정점들이 어떤 파이프에 존재하는지를 설정한다. 이 과정은 파이프와 밸브의 위치관계를 설정하기 위해 필요한 과정이다.
세 번째 알고리즘(알고리즘_3)은 관망 CAD 데이터에서 T-자형으로 표현되는 파이프를 파이프 분기점의 정점(T-정점)을 기준으로 분해한 후 알고리즘_1을 다시 실행하여 파이프가 T-자형으로 연결되는 지점에 대한 노드 번호를 설정하는 과정이다. 알고리즘_1과 알고리즘_3의 실행 과정을 통하여 관망 내 파이프의 모든 시점 및 종점과 파이프의 분기점에 대하여 노드를 생성하고 각 노드에 대해 고유의 번호를 설정한다.
네 번째 알고리즘(알고리즘 4)는 관망에서 밸브의 위치를 설정하는 단계이다. 즉, 밸브가 존재한다면 밸브는 두 정점 사이에서 존재하는 성질을 이용하여 밸브의 위치를 파악한 후 밸브와 파이프의 시점 및 종점 간의 거리를 이용하여 세그먼트 탐색 알고리즘에 필요한 정보인 밸브와 파이프의 시점 또는 종점 간의 연계관계 또는 귀속관계를 설정한다.
2.2 노드 설정 알고리즘(알고리즘_1)
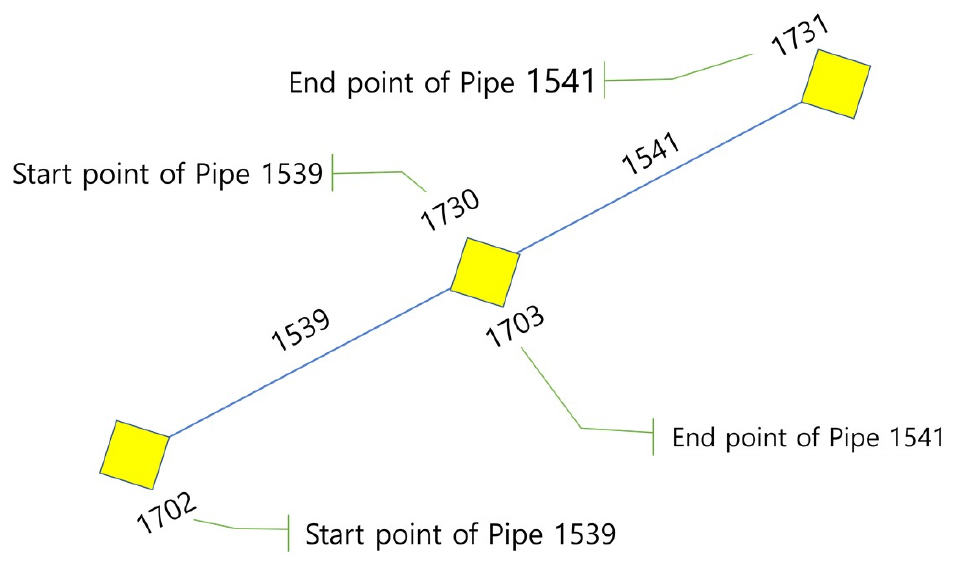
알고리즘_1은 GIS shape 파일을 CAD 자료로 변환한 후 파이프의 시점과 종점을 관망의 노드로 설정하는 과정으로서, 노드 번호는 1부터 시작하는 정수로 이루어진다. 지자체 관망 CAD 자료에는 Fig. 1과 같이 대부분의 파이프의 시점 혹은 종점이 같은 위치에 존재한다
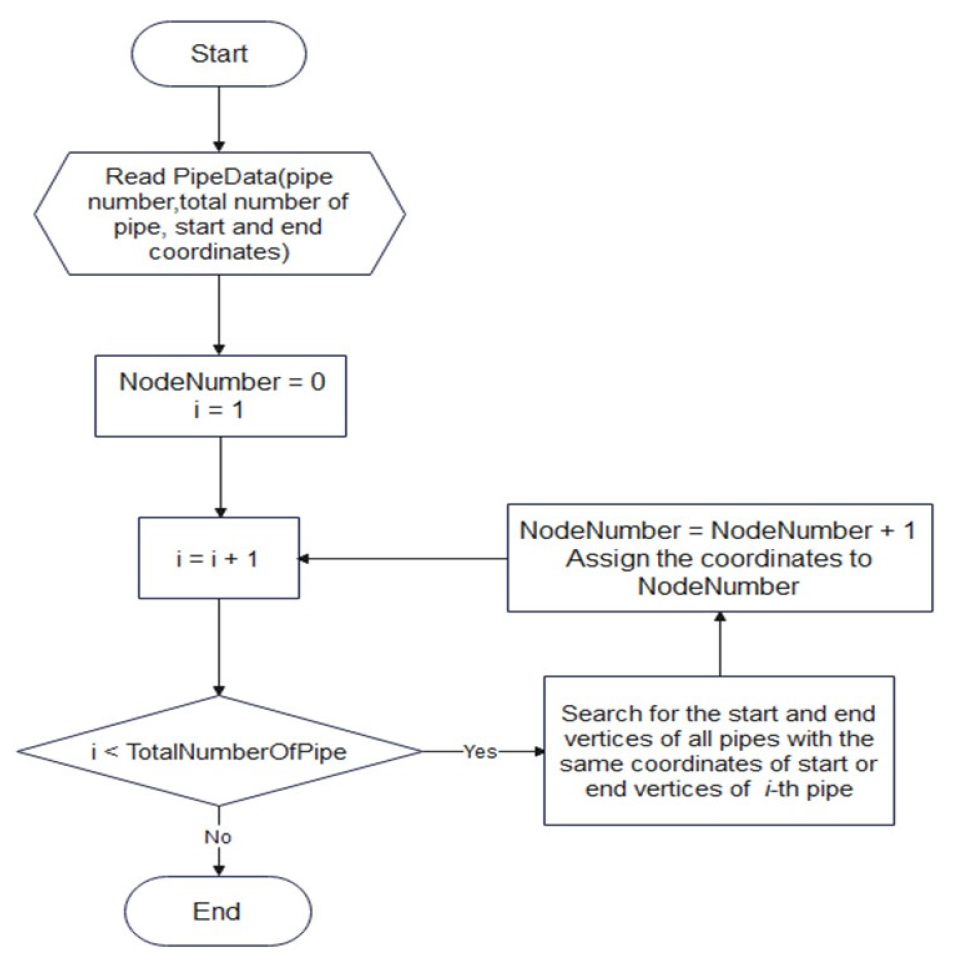
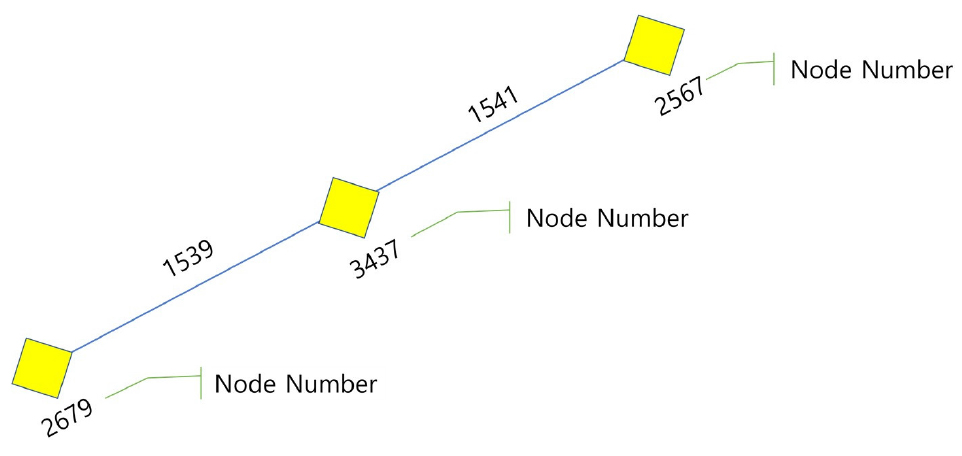
Fig. 1의 경우와 같이 파이프의 시점과 다른 파이프의 종점이 같은 위치에 존재하므로 알고리즘_1을 이용하여 이들 시점과 종점을 하나의 노드로 정의한다. 이를 위하여 같은 위치 좌표에 존재하는 파이프의 시점과 종점이 있는지를 관망내에서 탐색하여 같은 위치에 존재하는 시점과 종점들을 하나의 노드로 설정한다. 동일한 좌표가 존재하지 않는 파이프의 시점 또는 종점들은 새로운 노드 번호로 설정된다. Fig. 2는 알고리즘_1을 플로우차트의 형식으로 나타낸 것이다. Fig. 3은 알고리즘_1을 적용시키기 전인 Fig. 1에 보인 파이프에 대해 알고리즘_1을 적용시킨 후의 결과 즉, 파이프의 정점들이 파이프의 노드로 바뀐 결과를 나타낸 것이다.
2.3 파이프 고유번호를 파이프 상의 정점에 할당하는 알고리즘(알고리즘_2)
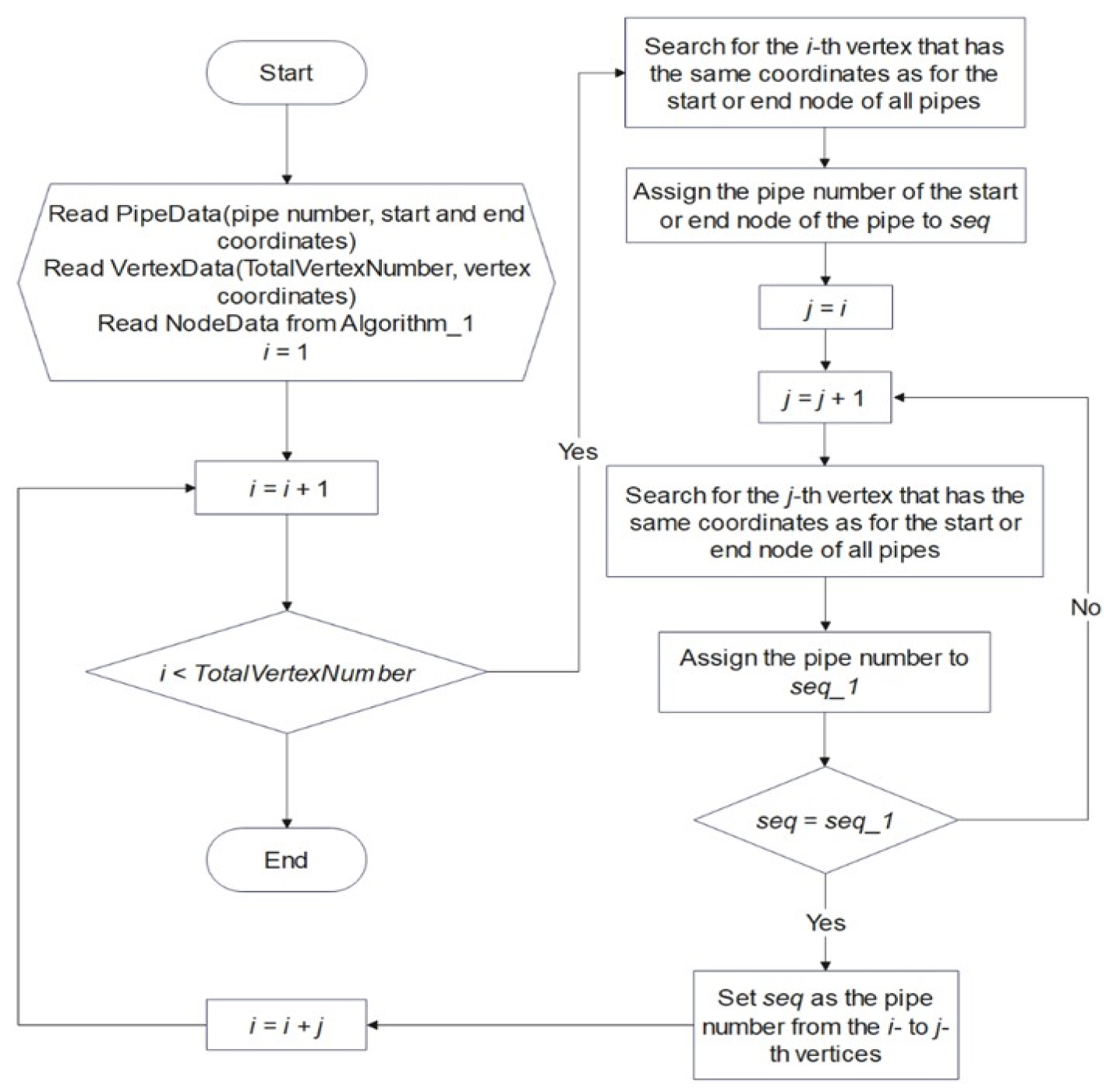
알고리즘_2는 관망 CAD 데이터의 파이프 고유번호를 파이프 상의 정점에 할당하는 알고리즘이다. 파이프 상에 밸브가 존재한다면 밸브는 파이프 상에 존재하는 두 정점 사이에서 존재하므로, 알고리즘_2는 알고리즘_4에서 파이프에 밸브의 존재 유무를 설정하기 위해 필요한 과정이다. 알고리즘_2 에서는 파이프 번호를 부여하고자 하는 정점의 좌표와 같은 좌표를 가지는 관망내 모든 파이프의 시점들과 종점들을 탐색한다. CAD 데이터에서 첫 번째 정점(1번 정점)은 항상 어떤 파이프의 시점이 되므로 1번 정점의 좌표를 모든 파이프의 시점 좌표 중에서 탐색하여 1번 정점의 좌표와 일치하는 좌표를 가지는 파이프의 시점에 연결된 파이프 번호를 1번 정점에 할당한다. 여기서 파이프의 시점 또는 종점에 연결된 파이프의 고유번호에 관한 정보는 관망 GIS 데이터에서 구한다.
같은 방법으로 두 번째 정점(2번 정점)에 연결된 파이프 번호를 2번 정점에 할당한다. 만약 2번 정점에 해당하는 파이프의 시점 또는 종점 좌표가 탐색이 되지 않으면, 다음 3번 정점의 좌표를 파이프의 시점 및 종점 좌표에서 탐색하고 이에 해당되는 파이프 번호를 1번 정점에서의 파이프 번호와 비교하여 파이프 번호가 같으면, 1, 3번 정점과 그 사이에 있는 2번 정점 모두에 동일한 파이프 번호를 할당한다. 이와 같은 과정을 통하여 관망의 모든 정점에 파이프의 고유번호를 부여하여 정점의 위치에 존재하는 파이프 정보를 설정한다. Fig. 4는 알고리즘_2를 플로우 차트의 형식으로 나타낸 것이다.
2.4 파이프의 교차점에 대한 노드 설정 알고리즘(알고리즘_3)
Fig. 5는 알고리즘_3의 적용 예를 들기 위해 사용한 관망의 T-자형 예시 파이프를 나타낸 것이다. 파이프 1539를 파이프 1539-1 과 1539-2로 분해하기 위해 파이프 32423의 노드 3436의 좌표를 관망 CAD 정점의 좌표들 중에 존재하는지 검색한 후 검색된 정점 좌표를 파이프 1539-1과 1539-2의 시점 또는 종점 좌표로 설정한다. Fig. 5에서 파이프 1539와 만나는 파이프 32423의 위치는 알고리즘_1을 다시 적용하므로써 번호가 부여된 노드로 설정된다. 이와 같이 T자형으로 결합되어 있는 파이프를 분해하는 과정에서 생성된 새로운 노드에 번호를 부여하기 위해 알고리즘_1을 한 번 더 반복해서 실행하여 관망의 모든 노드에 번호를 부여한다.
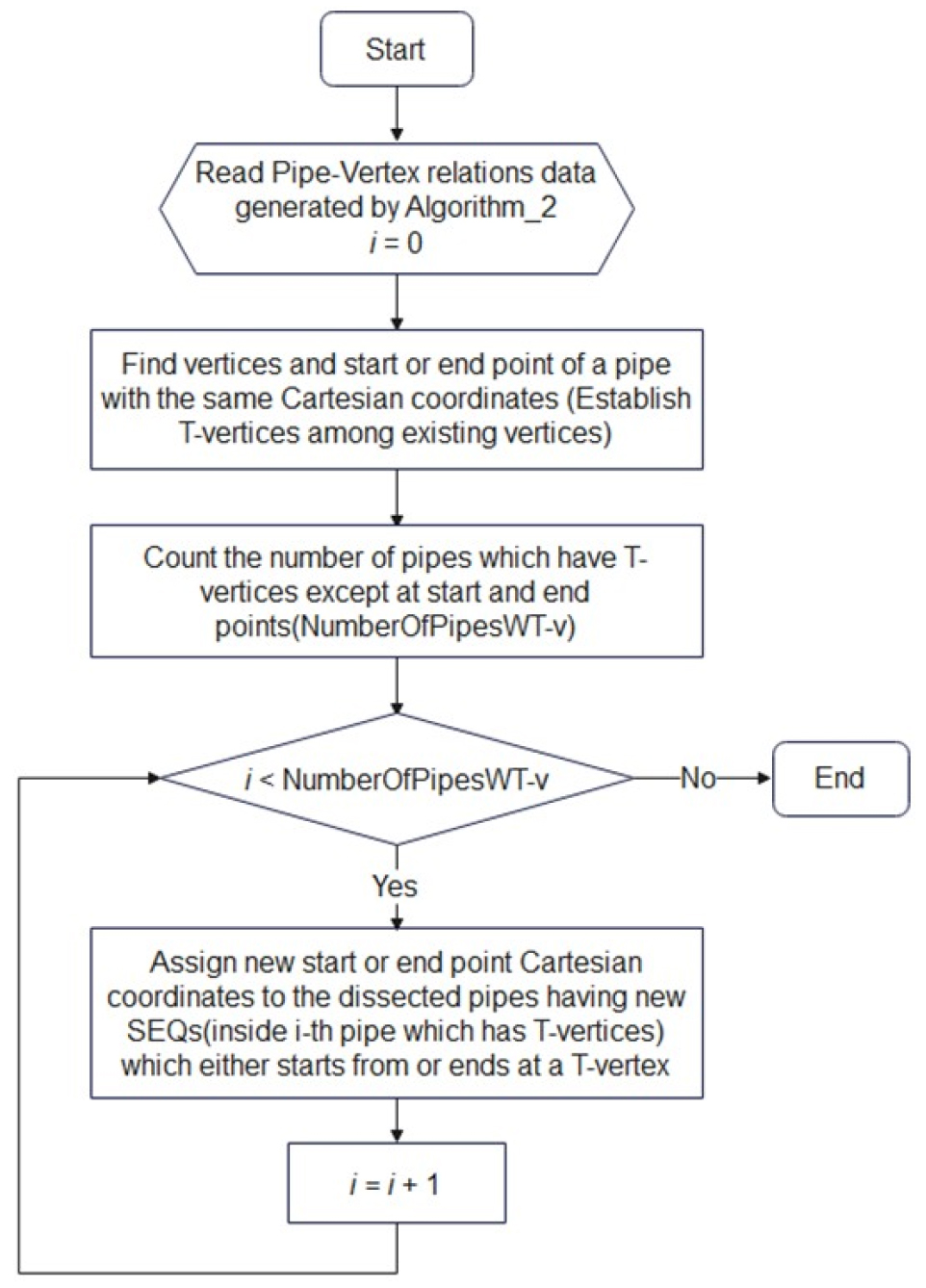
Fig. 5 및 Table 2는 관망의 T 자형 예시 파이프에 알고리즘_2를 적용하기 전의 상태를 나타내며, Fig. 6 및 Table 3은 예시 관망의 T 자형 예시 파이프에 파이프 교차점에 노드를 설정하는 알고리즘_2와 새로이 설정된 노드에 번호를 부여하는 알고리즘_1을 적용한 후의 결과를 나타낸다. Fig. 7은 알고리즘_3을 플로우차트의 형식으로 나타낸 것이다.
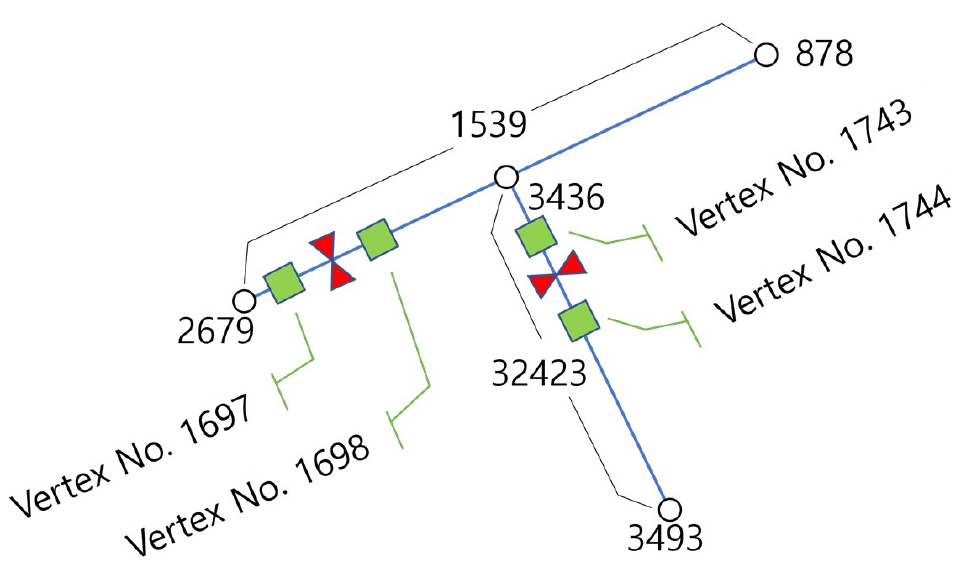
Table 2.
Data for the example pipes prior to the application of algorithm_3
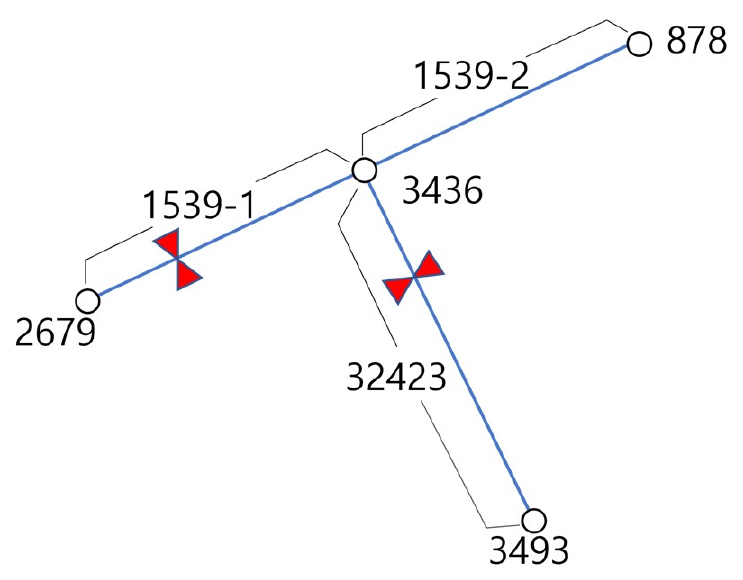
Table 3.
Data for the example pipes after the application of algorithm_3
2.5 파이프의 시점 또는 종점에 밸브의 존재 유무를 설정하는 알고리즘(알고리즘_4)
알고리즘_4는 파이프 상에 밸브가 존재하는지를 판단하는 과정이다. 또한 알고리즘_4에서는 파이프에 밸브가 존재할 경우 밸브의 위치에 따라 파이프의 시점 또는 종점에 밸브의 존재 유무를 설정한다. 알고리즘_4를 실행하기 위해서 파이프의 시점과 종점의 좌표와 밸브의 번호와 좌표 정보를 사용한다. 또한 알고리즘_3에서 설정된 파이프의 정점에 부여된 파이프 번호를 사용한다. 관망 CAD 데이터에서 파이프는 한 개 이상의 정점으로 이루어진 하나의 직선 또는 그러한 직선들이 연결된 구조이다. 따라서 파이프 상에서 연속되어 있는 두 정점을 잇는 직선의 방정식에 밸브의 좌표를 대입하여 계산된 y 좌표값과 밸브의 y 좌표값이 같은 경우 파이프의 시점과 종점으로부터 해당 밸브까지의 거리를 계산한 후 보다 가까운 위치의 노드에 밸브가 귀속되는 것으로 설정하는 알고리즘을 Fig. 8과 같이 개발하였다. 밸브가 파이프의 시점 또는 종점과 겹치는 경우에는 파이프의 시점과 종점에 밸브가 위치하는지 검색 후 검색된 파이프들 중 파이프 번호가 가장 빠른 파이프에 밸브가 위치하는 것으로 설정하였다.
Table 4는 Fig. 5의 예시 파이프에 알고리즘_4를 적용시킨 결과를 나타낸다.
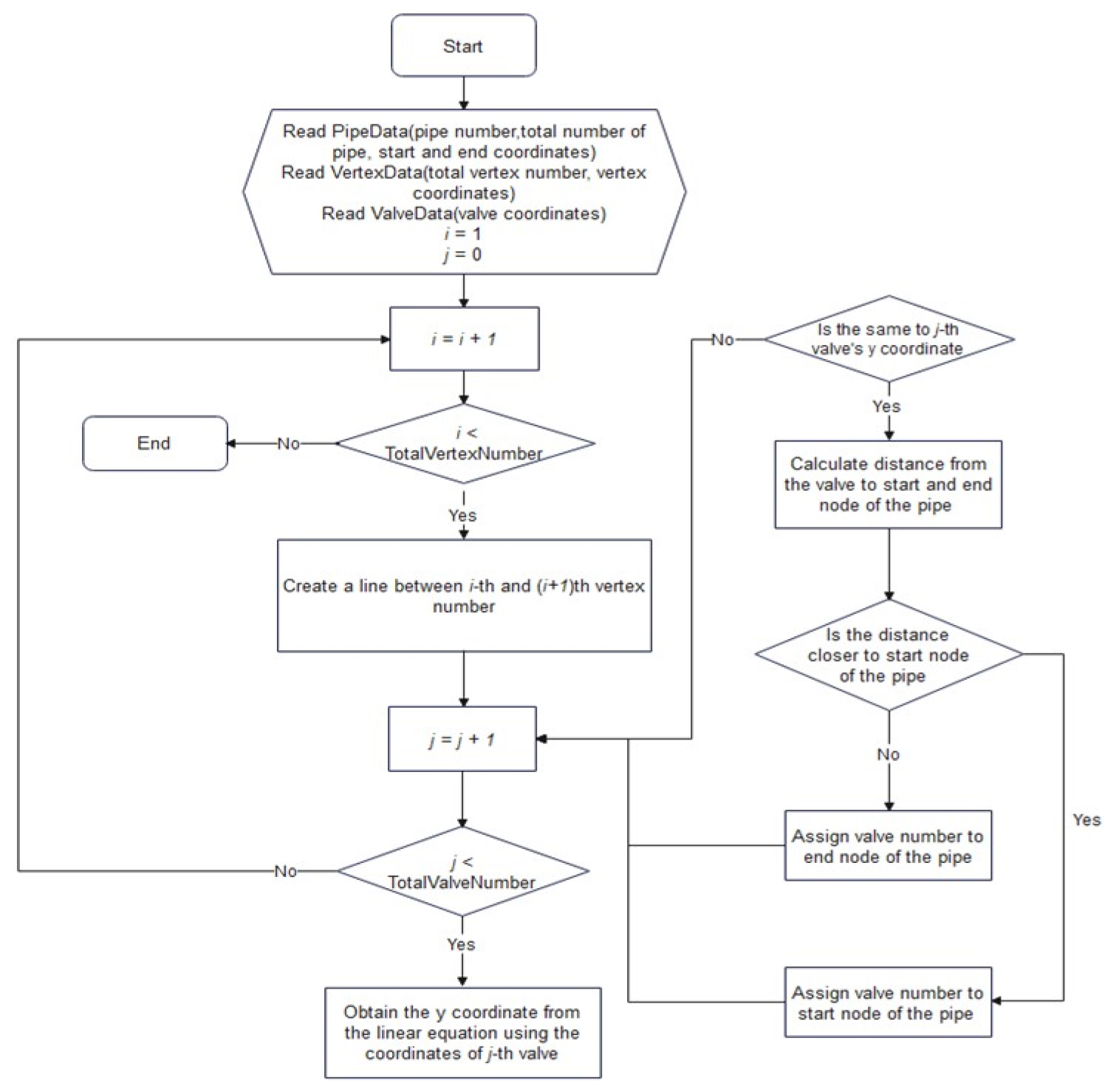
Table 4.
Data for the example pipes after the application of algorithm_4
3. 개발된 알고리즘의 적용 결과
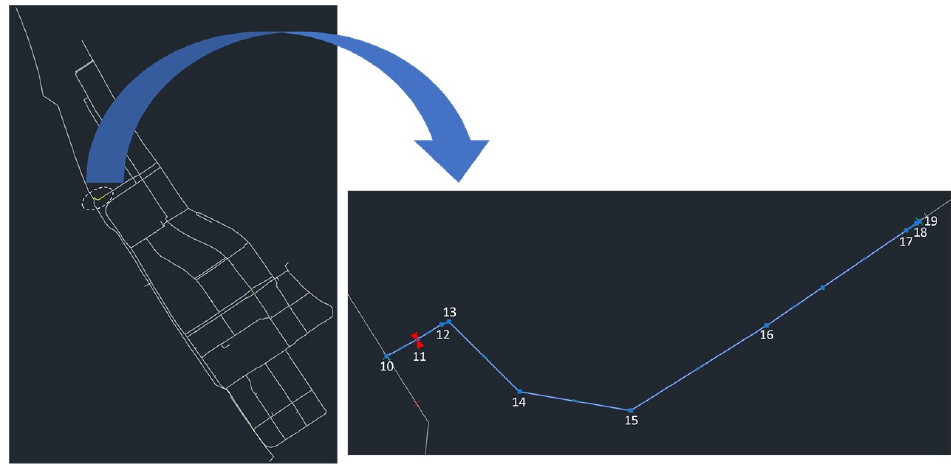
본 논문에서 개발된 알고리즘을 Fig. 9와 같은 관경 100 mm, 파이프 연장 15.2 km, 정점 1,791개 및 밸브 181개로 구성된 B시 H구의 관망 일부분에 적용하였다. Fig. 9에서 확대한 부분은 예시 관망에 개발된 알고리즘을 적용하기 전의 정점, 파이프 및 밸브에 관한 정보를 보기 쉽게 나타낸 것이다. Fig. 9의 확대된 부분의 파이프는 파이프 No. 335이며, Fig. 9에 보인 번호는 정점 번호를 나타낸다.
Tables 5, 6, 7은 Fig. 9으로 보인 예시 관망에 개발된 알로리즘을 적용하기 위해 사용한 예시 관망의 GIS/CAD 자료를 나타낸다.
Table 5.
GIS/CAD Pipe data of the case study pipe network
Table 6.
GIS/CAD vertex data of the case study pipe network
Table 7.
GIS/CAD valve data of the case study pipe network
Fig. 10은 Fig. 9에 보인 예시 관망에 개발된 알고리즘을 적용한 후 노드 No. 31과 34가 생성된 관망의 일부분(파이프 No. 335)을 확대하여 보여주며, Table 8은 예시 관망에 개발된 알고리즘을 적용한 후 생성된 관망의 노드-파이프-밸브 간의 상대적 위치관계를 보여준다.
Table 8에 보인 예시 관망의 노드-파이프-밸브 간의 위치 관계는 Park and Kim (2017) 등과 같은 관망 격리구역 탐색 알고리즘 구동의 입력 자료로 활용되어 관망의 세그먼트와 비의도적 고립구역의 탐색에 사용될 수 있다.
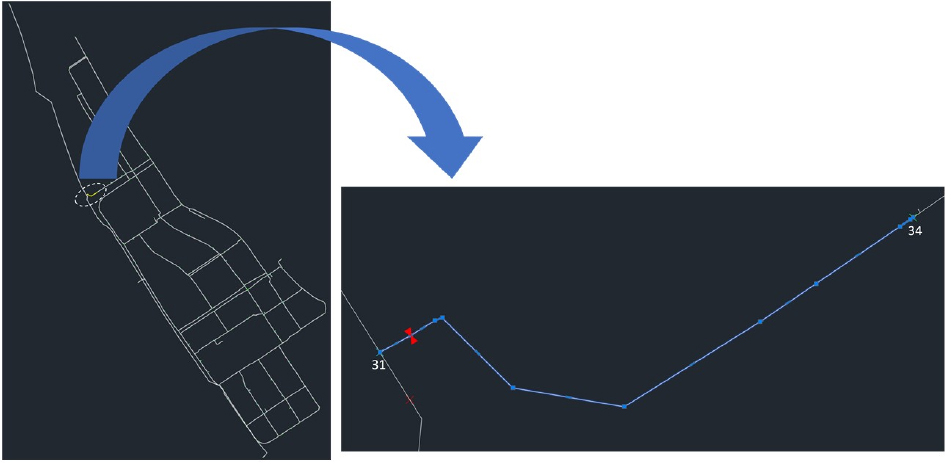
Table 8.
The node-pipe-valve relations for the case study pipe network
4. 결 론
관망의 격리구역을 파악하기 위해서는 관망의 주요 구성요소들인 노드, 파이프, 및 밸브 간의 상대적인 위치 관계를 격리구역 탐색 알고리즘의 입력정보로 준비해야 한다. 관망의 규모가 실제의 대규모 관망이고, 격리구역 탐색 알고리즘 구동에 필요한 입력자료가 준비되지 않은 경우 격리구역 탐색 알고리즘의 구동을 위한 입력파일의 생성 자체가 어려운 문제가 될 수 있다.
본 연구에서는 상수도 관망의 격리구역 탐색을 위한 계산 알고리즘의 구동에 필요한 정보인 관망의 노드-파이프-밸브 간의 상대적 위치관계를 수립할 수 있는 알고리즘을 개발하였으며, 이를 B 지자체 관망의 일부분에 적용하였다. 본 연구에서 개발된 알고리즘은 우리 나라 지자체 GIS/CAD 자료를 직접 활용하므로 관망 수리 모델링시 구축된 모델에 누락될 수 있는 제수밸브에 관한 정보도 관망의 격리구역 탐색에 사용될 수 있다. 따라서 본 연구에서 개발된 알고리즘을 활용하므로써 보다 정확한 관망의 격리구역의 파악이 가능할 것으로 사료된다.
또한 본 연구에서 개발된 알고리즘은 Park and Kim (2017)의 관망 격리구역 탐색 알고리즘의 입력 자료로 직접 사용할 수 있도록 개발되었으나, 개발된 알고리즘의 기본 골격을 활용하면 다른 세그먼트 탐색 알고리즘의 입력 자료로의 활용을 위한 알고리즘도 쉽게 개발될 수 있을 것으로 사료된다.
본 연구에서 개발된 알고리즘에 의하면 관망의 노드는 파이프 간의 모든 연결부분에 설정되는데, 이는 관망의 격리구역 탐색 알고리즘의 적용시 연산시간을 증가시키고 격리구역 탐색 결과에는 영향을 주지 않으므로 향후 이러한 불필요한 노드들을 제거할 수 있는 부가적인 알고리즘의 개발이 필요한 것으로 사료된다. 이러한 알고리즘은 파이프 상에서 두 밸브 사이에 존재하는 노드들은 제거하는 내용으로 구성될 수 있는데, 여기서 일반적으로 관망 수리시뮬레이션을 위한 실제 관망의 뼈대화 과정에서 발생하는 사각형 모양 관망의 모서리에 존재하는 노드는 제거하지 않아야 한다. 따라서 보완되는 알고리즘은 관망의 노드의 위치가 모서리에 존재하는지를 판단할 수 있는 내용이 추가되어야 할 것으로 사료된다.
