

1. 서 론
기존의 하천관리는 점과 선을 중심으로 이루어졌으나 드론 등 하천원격탐사에 기반을 둔 하천 통로(river corridor)에 대한 3차원 관리로의 패러다임 전환이 요구된다. 현행 하천조사 시스템으로는 하천관리에 필요한 데이터를 현황 변화에 맞추어 신속하게 취득하기가 어렵기 때문에 하천관리 고도화를 위해 필요한 자료를 적기에 신속하고 효율적으로 구축할 수 있는 기술 개발이 필요하다. 하천조사의 대부분이 노동집약적인 직접조사에 의존하는 실정에서 드론과 탑재 가능한 다양한 소형 센서의 등장은 하천조사를 효율적으로 실시하고, 고해상도 시공간자료를 저비용으로 확보할 수 있게 되어 하천 원격탐사에 새로운 전기를 마련할 수 있는 잠재력을 보여주고 있다(MOLIT, 2018). 따라서 투입인력과 소요시간 절감, 장비와 인력진입 불가지역에 대한 정보획득, 높은 공간해상도, 항공측량 대비 높은 경제성 등 다양한 장점이 있는 드론을 통해 얻은 위치정확도가 높은 하천지형정보를 이용한 수자원 변화 분석방안이 필요하다.
Flener et al. (2013)은 하천에서의 낮은 수심에서 지상라이다(Terrestrial LiDAR, TLS)를 기준으로 드론사진측량과 보트탑재 지형도제작시스템(boat-based mobile mapping system, BoMMS), 카트탑재 지형도제작시스템(Cart Mobile Mapping System, CartMMS), 이동레져스캐닝 Akhka (Mobile Laser Scanning, MLS) 데이터를 비교 분석하여 하천환경의 수치 표고모델(Digital Terrain Models, DTM) 생성의 정확도를 분석하였다. Bandini (2017)는 W-대역 레이더(W-band radar)와 위성항법시스템(Global Navigation Satellite System, GNSS)을 장착한 드론을 이용한 수위측정방법과 드론에 장착된 소나시스템을 통한 수심측정, 대규모 입자영상유속계(Large Scale Particle Image Velocimetry, LSPIV) 기술을 적용한 표면속도 측정 등 지상기준점(Ground Control Point, GCP) 없이 정확도 높은 새로운 측정방식을 제시하였다. Koutalakis et al. (2019)은 그리스에 위치한 아기티스 강의 지표수 속도를 추정하기 위해 저비용 무인항공기를 이용하여 얻은 데이터를 PIVlab, PTVlab, KUSTIV 세 가지 소프트웨어를 통해 비교 분석하였다. Yoshida et al. (2019)은 Air Bone LiDAR (ALB)를 이용하여 아사히강의 초목이 우거진 저지대를 대상으로 식생속성(식생의 종류 ·높이)과 하천지형의 데이터를 관측하고 실측된 범람데이터와 관측데이터를 적용한 시뮬레이션 값을 비교하여 원격탐사 방법을 적용한 홍수 범람 예측방법을 제시하였다. 또한 Schumann et al. (2019)은 하워드 카운티에 있는 강을 대상으로 드론을 이용한 측량데이터를 가지고 운동기반구조(Structure from Motion, SfM) 처리를 사용하여 홍수 위험지역에서의 적용방향을 제시하였다. Escobar Villanueva et al. (2019)은 홍수추정에 응용하기 위해 드론을 이용한 LCP (LiDAR-derived ground control point) 방법으로 도출된 수치표고자료(Digital Elevation Models, DEM)의 정확성을 평가하고 적용방향을 제하였으며, Backes et al. (2020)은 빙하 흐름에 대한 강의 지형모니터링을 위해 드론 사진측량과 D-LiDAR 측량을 이용하여 지형모델의 적용 가능성을 테스트하였다.
드론과 다양한 센서들을 이용해 공간정보 획득을 위한 방안들이 국내외적으로 연구되고 있다. 국내에 경우 Lee et al. (2016)은 지상기준점의 수와 배치에 따른 평면좌표의 연결교차의 평균 제곱근 오차(RMSE) 값과 고도좌표의 RSME값에 대한 오차를 비교 분석하였으며, Lee and Lee (2017)는 지붕면이 교차하는 지점을 포함한 건물을 각 방향의 음영기복도(Shaded Relief Map, SRM)에서 추출된 모서리점 좌표에 대하여 평균값을 계산하여 특징점으로 결정하는 방법을 제시하였다. Han (2019)은 드론 사진측량 정확도 분석에 대한 연구사례를 분석하고 드론사진 측량에 대한 GCP배치, 촬영고도, 외부표정(Exterior Orientation, EO) 요소에 따른 오차를 검증하고 드론 사진측량을 진행할 때의 고려사항 들을 제안하였으며, Kim and Hong (2020)은 5가지 유형별 지상기준점과 검사점을 배치시키고 항공 삼각측량의 성과 분석과 산출물인 정사영상의 정량적, 정성적 분석과 웹 기반 운영 체제(DiskStation Manager, DSM)를 이용한 공간분석에 대한 연구를 수행하였다. Park and Um (2020)은 D-LiDAR (Light Detection And Ranging)를 활용하여 하천 내 수목과 기타 지물에 대한 데이터를 추출하여 지면에 대한 포인트클라우드 형태의 3차원 공간정보를 생성하였다. 포인트클라우드 후처리 프로그램은 GLOBAL MAPPER를 사용하였으며, GLOBAL MAPPER 프로그램 중 LiDAR모듈은 Atoumatic Classification of Ground Points 기능을 이용하였다. GNSS를 이용한 검사점의 측량성과와 비교를 통해 하천측량을 위한 D-LiDAR 데이터의 활용성을 제시하였다.
도시하천구간을 대상으로 Network RTK (Real Time Kinematic) 측량의 정확도를 검증하기 위해 하천기본계획의 지형 자료와 Network RTK를 이용한 실측된 지형 자료를 HEC-RAS에 적용하였으며 HEC-HMS 모형을 이용하여 빈도별 홍수량을 산정하고 100년 빈도 계획홍수량을 HEC-RAS에 적용된 각 지형자료에 적용하여 홍수위 분석을 진행하였다(Kim, 2016). 오차검증을 완료한 Network RTK 측량을 기준으로 D-RGB 측량과 D-LiDAR 측량의 지형데이터를 HEC-RAS에 적용하여 D-LiDAR 측량을 하천지형측량에 적용 가능성을 검증하였다(Kim and Lee, 2020; 2021a; 2021b).
본 연구에서는 현재 수공실무에서 많이 사용하고 있는 GNSS측량을 기준으로 하고, 이를 대체할 수 있는 드론을 이용한 보다 향상된 측량방법을 제시하고자 한다. 이를 위해 GNSS측량 값을 참값으로 가정하기 위해 위치보정을 실시하였고, D-RGB와 D-LiDAR도 GNSS와 동일한 좌표 값으로 보정 후 오차 검증을 진행하였다. 이 검증은 측정값의 각 측점별 횡단면적 비교를 통해 측점별 지형의 차이를 판단할 수 있었고 또한 HEC-RAS 모형으로 산출된 결과들을 GNSS지형을 기준으로 D-RGB와 D-LiDAR 측정값을 비교·분석함으로써 D-LiDAR에 의한 하천 지형측량의 정확성을 확인·제시 하고자 한다.
2. 지형실측
2.1 적용 대상 지역
2.1.1 대상지 선정
충남 서산시 성연면 명천리 452-6번지 내에 위치한 지방하천 성연천 하류부 450 m를 본 연구 대상지로 선정하였다. Fig. 1(a)는 연구대상지 항공사진 위치도면이며 Figs. 1(b) and 1(c)는 드론으로 촬영된 연구대상지 전경이다.

2.1.2 사용 장비·프로그램
Figs. 2(a)~2(f)는 본 연구에 사용된 장비이며, Figs. 2(a) and 2(b)는 GNSS 측량장비로 Trimble사의 R12 수신기와 RSC7 컨트롤러이다. 이는 현재 실무에서 가장 많이 사용하고 있는 장비로 직관적으로 사용자가 측량하고 싶은 위치 범위를 직접적으로 측정하여 데이터 취득이 용이하나 위성의 수신방해가 있는 곳에서는 측정에 어려움이 있다. Figs. 2(c) and 2(d)는 D-RGB 측량장비로 DJI사의 Inspire2 드론과 Zenmuse X7 DL-S 16 mm RGB 카메라이다. 이는 접근하기 어려운 대상물의 관측이 가능하며 해상도만 만족한다면 축척변경이 자유로우나 피사체가 그림자 안에 있는 경우 또는 사각으로 인해 사진에 나타나지 않는 대상물은 해석이 불가능 하며 현장측량 방법에 비해 과정이 복잡하고 후처리 관계로 시간이 소요된다. Figs. 2(e) and 2(f)는 D-LiDAR 측량장비로 DJI사의 M300 RTK 드론과 Greenvalley LiDAR 장비이다. 이는 다중 회귀펄스를 측정하는 장비로 원하는 정보를 추출하기 위해 어떠한 회귀펄스를 사용할 것이지 사용목적에 따라 선택하여 추출이 가능하며 비행이 가능한 날씨라면 분광량, 그림자, 구름 등의 영향을 받지 않으나 데이터 추출과 후처리과정에 있어 복잡한 관계로 시간이 소요된다.
본 연구에는 제조사 PIX4D의 PIX4D Mapper (상업용)와 Blue Marble Geographics의 Global Mapper (상업용), MATLABs Ptocessting Tollbox의 PlVlab과 PTVlab (범용), Kobe University의 KUSTIV (Kobe University Space-Time Image Velocimetry) (범용) 등의 소프트웨어가 사용되었다.

2.2 기준점 측량
2.2.1 GNSS 기준점 측량
본 연구에 사용한 평면 직각 좌표계는 세계측지계 좌표(GRS80)를 사용했으며 표고 기준 값은 인하공업전문대학 구내에 설치된 수준원점(26.6871 m)을 기준으로 설치된 수준점을 기준으로 사용하였다. 또한 현황측량과 지상기준점(GCP), 검사점 측정은 이들 설치에 필요한 Network RTK 측량 오차 값을 비교하기 위해 Trimble사의 R12 수신기와 RSC7 컨트롤러를 이용하였다. GNSS측량에는 3개 국가기준점인 통합기준점(Unified Control Points, UCP) 4점과 삼각점(Triangulation Point, TP) 3점, 수준점(Bench Mark, BM) 3점이 포함된 총 10점을 선정하였다. 이는 공공측량 작업규정 제179조에 의거 안테나 높이 2 m, 세션 관측시간 1분으로 측량하였으며, 3개 국가기준점의 고시 값과 GNSS 측량 값을 이용해 검정(calibration) 오차를 비교하였다.
2.2.2 평면기준점
Table 1은 평면기준점의 실측값 비교표이며 평면좌표(X, Y)값을 포함한 통합기준점 4점과 삼각점 3점에 대해 고시된 값과 GNSS 측량으로 얻은 값을 이용하여 GNSS 측량에 대한 평면기준점 오차를 검증하였다. 검증결과 △X는 최대 0.047 m, △Y는 최대 0.039 m로 공공측량 작업규정 제26조에 정한 3차원 망 평균계산에 사용하는 허용범위 미지점 수평위치 표준편차 0.100 m이내의 결과로 나타났다.
Table 2는 표고기준점의 실측값 비교표이며 표고(Z)값을 포함한 통합기준점 4점과 수준점 3점에 대해 고시된 값과 GNSS 측량으로 얻은 값을 이용하여 GNSS 측량에 대한 표고기준점 오차를 검증하였다. 검증결과 최대 0.025 m로 공공측량 작업규정 제26조에서 정한 3차원 망 평균계산에 사용하는 허용범위 미지점 표고의 표준편차 0.200 m이내의 결과로 나타났다.
Table 1.
Comparison for measured of plane reference points
Table 2.
Comparison for measured of elevation reference points
2.2.3 지상기준점과 검사점
본 연구대상지역에 대한 Network RTK 측량과 Drone 측량(D-RGB, D-LiDAR)의 결과를 동일 좌표 값으로 보정하여 각 측량성과별 공간정보 데이터를 비교 분석하기 위해 평면(X, Y) 오차와 표고(z)오차에 대한 검정을 마친 검정 값을 사용한 Network RTK 측량으로 지상기준점(GCP1, GCP2, GCP3, GCP4, GCP5, GCP6) 6점을 설치하였다. 또한 Network RTK 측량과 Drone 측량과의 오차를 확인하기 위해 지상기준점과 동일한 방법으로 검사점(CP1, CP2 CP3) 3점을 설치하였다.
Table 3은 GNSS장비를 이용한 Network RTK 측량을 통해 지상기준점(GCP1, GCP2, GCP3, GCP4, GCP5, GCP6) 6점과 검사점(CP1, CP2 CP3) 3점에 대한 X, Y, Z측정값 결과이다.
Table 3.
Results measuring on GCP and CP
2.3 지형측량
2.3.1 Network RTK와 D-RGB 측량
Network RTK 측량은 통합기준점 4점, 삼각점 3점, 수준점 3점, 총 10점을 검정한 값으로 보정된 Network RTK를 활용하여 하천 현황측량을 진행하고, Network RTK 현황측량도, Network RTK 3D 현황도를 작성하였다. D-RGB 측량에 사용된 장비는 DJI Inspire 2 드론과 Zenmuse X7 DL-S 16 mm 카메라를 사용하였고 촬영고도는 100 m로 설정하였으며 무인비행장치 이용 공공측량 작업지침 제3장에 매칭점이 부족하거나 높이차가 있는 지역 종중복도 75%, 인접 중복도 70% 이상을 기준으로 촬영방향 중복도 85%, 인접코스 중복도 85%로 D-RGB 측량을 진행하였다.
D-RGB 측량 데이터를 사진정합 프로그램인 PIX4D Mapper를 통해 정합한 결과 총면적은 0.092 km2이며 공간적 샘플간격(Ground Sampling Distance, GSD)은 0.86 m로 나타났다. D-RGB 측량 데이터에 대한 좌표보정을 위해 D-RGB 측량으로 얻은 사진데이터 상의 GCP1~GCP6을 Network RTK 측량으로 얻은 GCP1~GCP6의 좌표결과와 일치시키는 작업을 진행하였다. 파란색으로 표시된 사진의 위치는 D-RGB 측량으로 얻은 사진자료들이 가지고 있는 좌표 값으로 배열된 것이며, 녹색으로 표시된 사진의 위치는 Network RTK 측량으로 얻은 GCP의 좌표 값으로 조정되어 배열하며, 좌표를 보정한 후 정사사진과 포인트클라우드를 작성하였다. D-RGB 측량으로 얻은 포인트클라우드 상의 CP 좌표를 검증하며, Network RTK 측량과 D-RGB 측량의 검사점 오차는 최대 오차는 △X 값 0.035 m, △Y값 0.012 m, △Z값 0.031로 공공측량 작업규정 제26조에 정한 3차원 망 평균계산에 사용하는 허용범위 미지점 수평위치 표준편차 0.100 m이내, 미지점 표고의 표준편차 0.200 m이내의 결과로 나타났다.
2.3.2 D-LiDAR 측량
본 과업의 D-LiDAR 측량에 사용된 장비는 DJI M300 RTK 드론과 Greenvalley LiDAR이며 Fig. 3과 같이 후처리 보정방식인 PPK (Post Processed Kinematic)를 사용하여 촬영고도 100 m로 D-LiDAR 측량을 진행하였다.
Fig. 4(a)는 D-LiDAR 측량으로 얻은 초기 포인트클라우드 데이터로 초기데이터 내에서는 GCP 확인이 불가하여 Fig. 4(b)와 같이 Greenvalley사의 후처리 프로그램인 LiGeoreference 프로그램을 통해 LiDAR로 얻은 포인트클라우드와 동시에 취득된 RGB값으로 LiDAR데이터에 RGB컬러를 입히는 작업을 진행하였다. 보정 후 Fig. 4(c)와 같이 GCP식별이 가능한 RGB 컬러가 입혀진 포인트 클리우드데이터를 취득하였다.
D-LiDAR 측량 데이터를 LiDAR 보정 프로그램을 통해 Fig. 5와 같이 사진 상에 표시된 GCP를 Network RTK 측량으로 얻은 GCP 좌표 결과를 통해 좌표 보정을 진행하였다.
Fig. 6은 D-LiDAR 측량으로 얻은 포인트클라우드 상의 CP 좌표를 측정한 모습이며 Network RTK 측량과 D-LiDAR 측량의 CP 오차는 Table 4와 같다. 최대 오차는 △X 값 0.054 m, △Y값 0.081 m, △Z값 0.032 m로 공공측량 작업규정 제26조에 정한 3차원 망 평균계산에 사용하는 허용범위인 미지점 수평위치 표준편차 0.100 m이내, 미지점 표고의 표준편차 0.200 m 이내로 나타났다.
이들 결과를 종합하면, GNSS의 평면국가기준점 측량에서 통합기준점 4점과 삼각점 3점에 대해 고시된 값과 GNSS측량을 이용하여 측량한 X, Y 비교값 오차는 △X에서 최대 0.047 m, △Y에서 최대 0.039 m로 나타났다. 이는 공공측량 작업규정 제26조(RTK-GNSS 공공삼각점측량)에서 정하는 3차원망 평균계산에 사용하는 허용범위 미지점 수평위치 표준편차 0.100 m 이내(NGII, 2019)를 만족시키는 것으로 나타났다. GNSS의 표고기준점 측량에서 통합기준점 4점과 수준점 3점에 대해 고시된 값과 GNSS측량에 의한 Z 비교값 오차는 △Z에서 최대 0.025 m로 공공측량 작업규정 제26조(RTK-GNSS 공공삼각점측량)에서 정하는 3차원망 평균계산에 사용하는 허용범위 미지점 표고의 표준편차 0.200 m 이내(NGII, 2019)를 만족시키는 것으로 나타났다. 또한 기준점 측량에서 평면오차와 표고오차가 모두 0.100 m 이내로 나타났는데 이들 결과를 기준으로 GNSS 기준점 측량의 신뢰도가 높은 것으로 판단하였다. Network RTK측량의 위치오차 또한 신뢰도가 높게 나타나 Network RTK를 이용한 하천현황측량결과 값은 현장에서의 직접 측량한 값을 참값으로 적용하였다. 이들 과정을 통해 D-RGB와 D-LiDAR측량방법의 하천 지형측량 정확도 비교에서 D-LiDAR측량 방법이 우수한 결과를 나타냈는바 이 방법을 하천지형 측량방법으로 추천하였다.

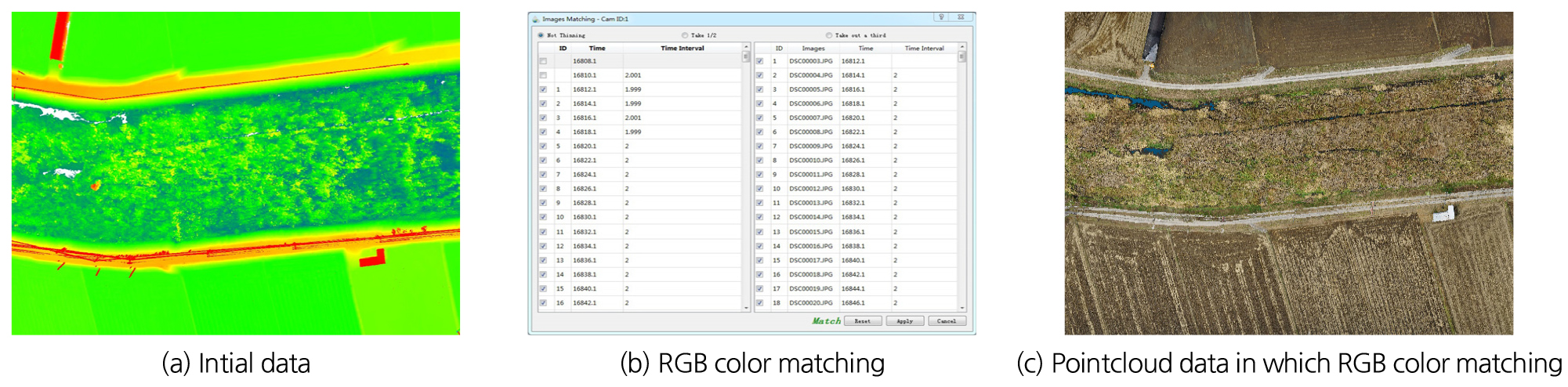


Table 4.
Comparison for CP coordinate verification
3. 분석 및 고찰
D-RGB 측량과 D-LiDAR 측량에서 얻은 지형데이터는 식생과 지장물이 포함되어 있어 Network RTK 측량 데이터와의 지형비교를 위해 포인트클라우드 후처리 프로그램을 통해 식생과 지장 물을 제거 후 지표면 데이터로만 형성된 DTM으로 변환하였다. Network RTK 측량으로 얻은 지표면데이터와 D-RGB 측량과 D-LiDAR 측량으로 얻은 DTM 데이터를 수치해석 프로그램인 HEC-RAS로 적용한 후 각 데이터의 종·횡단면을 작성하였다. 또한 흐름특성분석을 위한 경계조건은 2009년도 성연천 하천기본계획에 제시된 빈도별 홍수위 20년; 3.39 m, 30년; 3.49 m, 50년; 3.62 m, 80년; 3.73 m, 100년; 3.78 m, 유량 자료는 빈도별 홍수량 20년; 255 m3/s, 30년; 277 m3/s, 50년; 305 m3/s, 80년; 331 m3/s, 100년; 343 m3/s, 조도계수는 0.030으로 동일하게 적용하였다(Chungnam, 2009).
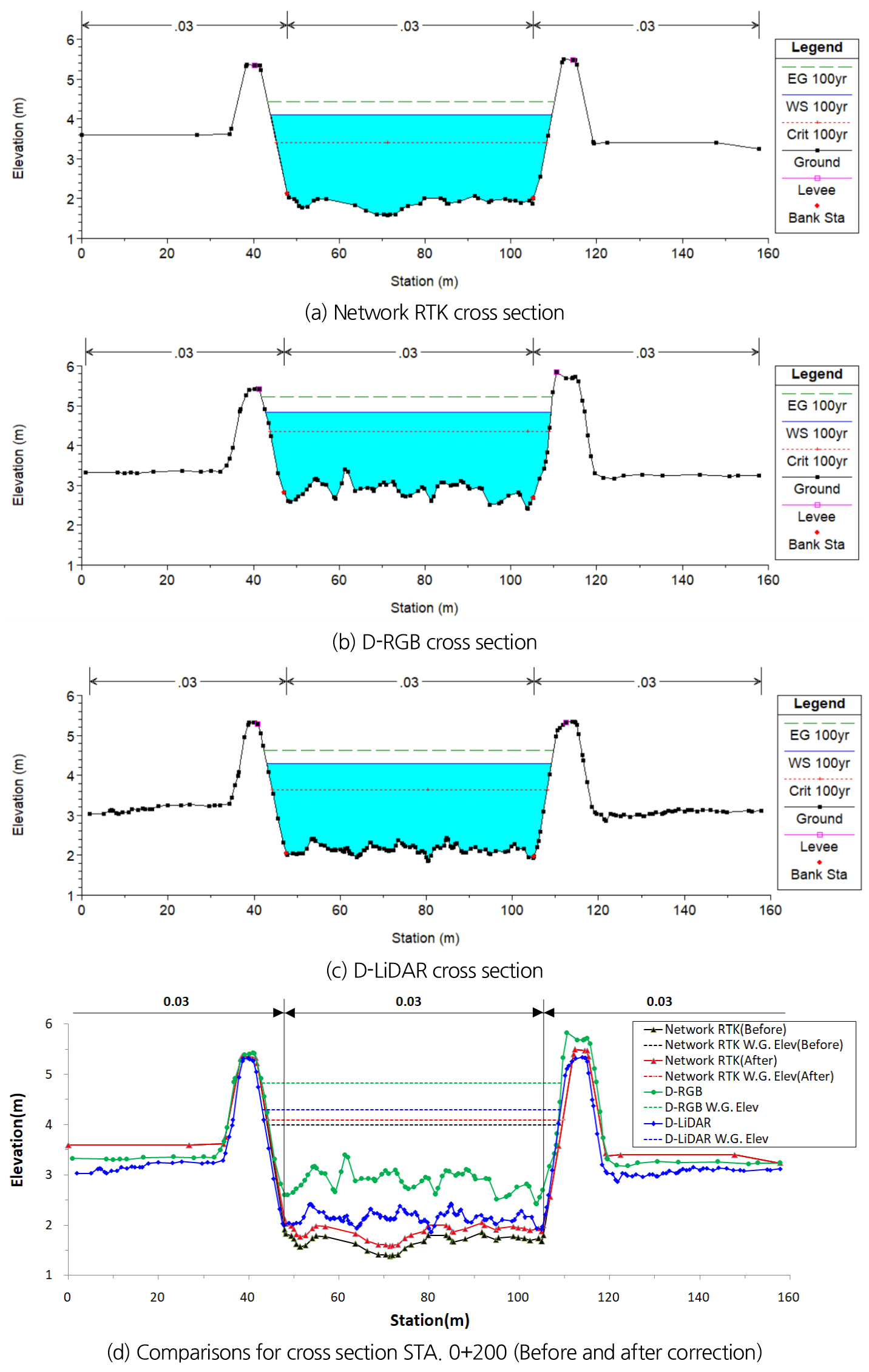
Fig. 7은 HEC-RAS 모형을 통해 얻은 수리특성값과 본 연구에서 적용한 드론 활용 측량방법에 의한 측량성과의 정량적 분석을 위한 자료이다. Fig. 7(a)는 HEC-RAS를 통해 얻은 Network RTK 데이터의 STA. 0+200 횡단면도로 100년 빈도 홍수위는 4.09 m이고, Fig. 7(b)는 D-RGB 데이터의 STA. 0+200 횡단면로 100년 빈도 홍수위는 4.83 m로 나타났다. Fig. 7(c)는 D-LiDAR 데이터의 STA. 0+200 횡단면도로 100년 빈도 홍수위는 4.29 m로 나타났고, Fig. 7(d)는 HEC-RAS의 실행을 통해 얻은 Network RTK 데이터와 D-RGB, D-LiDAR 데이터의 STA. 0+200 횡단면 측량결과를 비교한 것이다. Network RTK 측량결과에서 대호지 인근에 위치한 하천 특성상 점토질 하상재료의 표척 거치 문제 등을 고려하여 0.20 m 오차를 보정하였으며 이로 인한 홍수위의 결과도 변화가 되었음을 짐작할 수 있다.
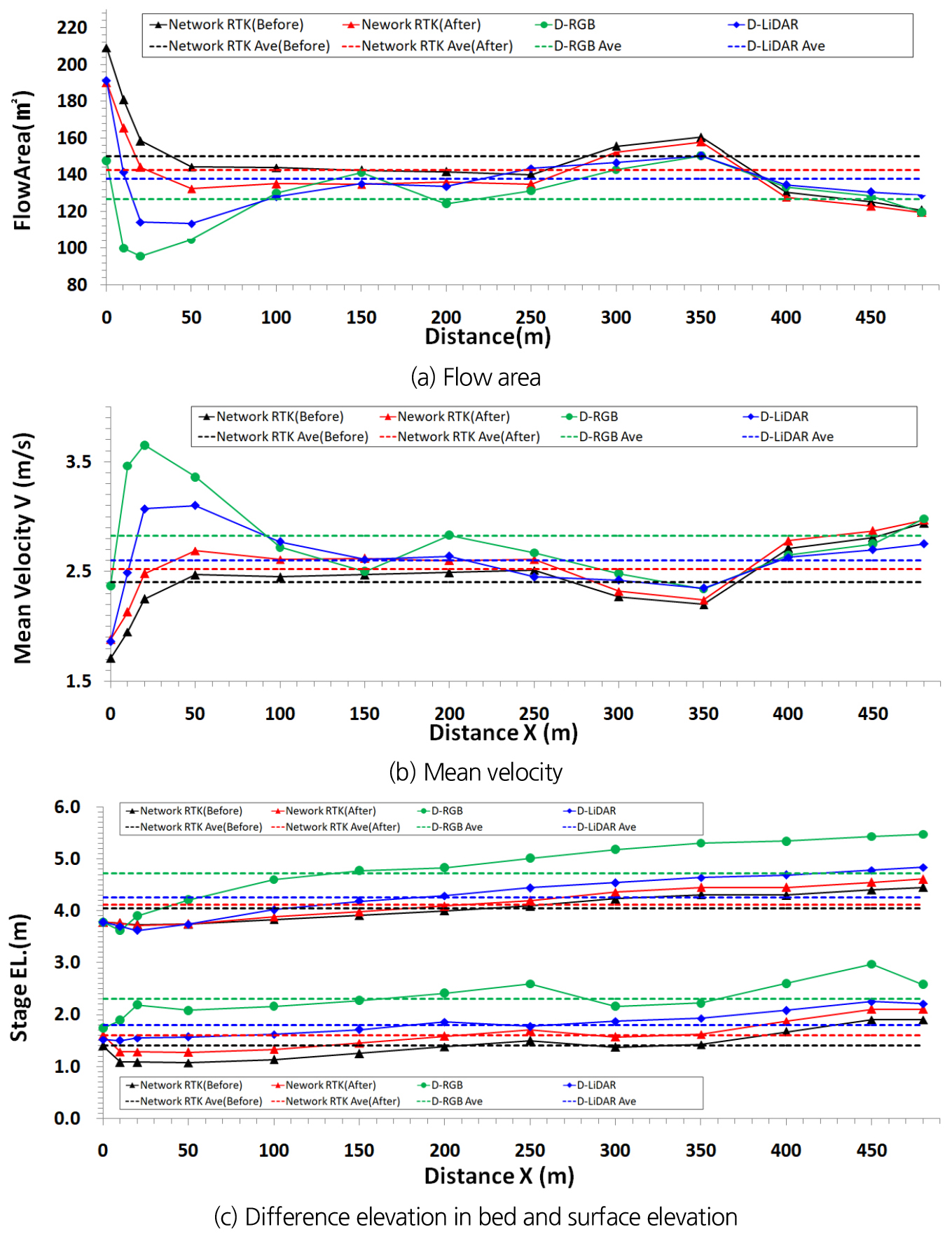
Figs. 8(a)~8(c)는 드론의 실무 활용화와 측량방법의 정확성 검증을 위해 Network RTK 측량과 D-RGB 측량, D-LiDAR 측량에 의한 100년 빈도 계획 홍수량 조건에서의 HEC-RAS에 의해 산정된 평균통수 단면적, 평균유속, 홍수위와 하상고 등 수리특성 값을 각 측점별(STA. 0+0~0+480)로 비교한 결과이다.
Fig. 8(a)는 각 지점별 Network RTK 측량을 기준으로 한 측량오차의 비교 결과로 D-LiDAR 측량은 D-RGB 측량보다 평균통수 단면적 측정 오차가 4.7 m2로 적게 측정되었다. 다만, Network RTK 측량과 D-LiDAR 측량의 경우는 하상지형까지 포인트클라우드가 추출되어 DTM 데이터를 형성할 때 하상의 식생에 대한 영향이 적었으나 D-RGB 측량의 경우 식생이 있는 위치에서는 하상지형까지 포인트클라우드가 추출되지 않아 DTM 데이터를 형성할 때 식생의 상단을 하상지형으로 인식하여 평균 통수단면이 Network RTK 측량과 D-LiDAR 측량에 비해 작게 산정되는 경향도 있었다.
Fig. 8(b)는 평균유속의 각 측점별(STA. 0+0~0+480) 산정결과 비교로 D-RGB 측량보다 D-LiDAR 측량의 평균유속 측정 오차가 0.08 m/s로 작게 산정 되었다. Network RTK 측량과 D-LiDAR 측량의 경우 하상평균경사가 각각 0.184%, 0.218%로 두 측량의 하상평균경사가 0.034%의 차이를 보였으며, D-RGB 측량의 경우 하상에서 식생의 영향으로 평균하상경사가 0.805%로 Network RTK 측량 보다 0.621%, D-LiDAR 측량 보다 0.587%의 차이로 나타났다. 동일조건의 조도계수에서 식생으로 인한 하상경사의 차이로 인해 Network RTK 측량과 D-LiDAR 측량보다 D-RGB 측량의 평균유속이 가장 빠르게 산정되었다.
Fig. 8(c)는 Network RTK 측량결과의 0.20 m 오차를 더해 보정한 각 측점별(STA. 0+0~0+480) 홍수위와 하상고의 비교 결과로 각 지형별 평균 하상고는 Network RTK 측량 1.60 m, D-RGB 측량 2.30 m, D-LiDAR 측량 1.80 m의 값으로 산정되었다. 각 지형별 평균 홍수위는 Network RTK 측량 4.28 m, D-RGB 측량 4.73 m, D-LiDAR 측량 4.25 m로 산정되었으며, D-RGB 측량보다 D-LiDAR 측량의 평균 하상고와 평균 홍수위 측량 오차가 각각 0.21 m, 0.13 m로 적게 산정되었다.
이상에서와 같이 평균 하상고와 홍수위, 평균유속, 통수 단면적 측량오차의 비교 결과를 종합할 때 Network RTK 측량을 기준으로 한 D-RGB 측량과 D-LiDAR 측량은 하상에 산재되어 있는 식생으로 인한 장애 영향이 적은 D-LiDAR 측량이 가장 효율적인 측량방법으로 분석·평가되었기에 이 측량방법을 드론 실무 활용화 방안으로 추천한다.
4. 결 론
본 연구는 Network RTK 측량과 드론을 활용한 측량성과 비교를 통해 드론을 이용한 하천지형측량과 수리특성 분석의 정확성·드론의 활성화 방안을 도출하고자 지방하천의 수로구간을 대상으로 하여 다음과 같은 결론을 얻었다.
1) 통수 단면적은 각 지점별 Network RTK 측량을 기준으로 한 측량 오차의 비교 결과에서 D-LiDAR 측량은 D-RGB 측량보다 평균통수 단면적 측정 오차가 4.7 m2로 적게 산정되어 D-LiDAR에 의한 측량결과가 우수한 것으로 나타났다. 다만, Network RTK 측량과 D-LiDAR 측량의 경우는 하상지형까지 포인트클라우드가 추출되어 DTM 데이터를 형성할 때 하상의 식생에 대한 영향이 적었으나 D-RGB 측량의 경우 식생이 있는 위치에서는 하상지형까지 포인트클라우드가 추출되지 않아 DTM 데이터를 형성할 때 식생의 상단을 하상지형으로 인식하여 평균 통수단면이 Network RTK 측량과 D-LiDAR 측량에 비해 작게 산정되는 경향도 있었다.
2) 평균유속의 각 측점별 산정결과는 D-RGB 측량보다 D-LiDAR 측량의 측정 오차가 0.08 m/s로 작게 나타나 후자의 방법이 우수한 것으로 평가되었다. Network RTK 측량과 D-LiDAR 측량의 경우 하상평균경사가 0.184%, 0.218%로 두 측량의 하상평균경사가 0.034%의 차이를 보였으며, D-RGB 측량의 경우 하상에서 식생의 영향으로 평균하상경사가 0.805%로 Network RTK 측량 보다 0.621%, D-LiDAR 측량 보다 0.587%의 차이를 보여 하상경사와 식생의 영향을 크게 받는 것으로 분석되었다.
3) 홍수위와 하상고는 보정된 Network RTK 측량값과 각 측점별 평균 하상고에서 Network RTK 측량 1.60 m, D-RGB 측량 2.30 m, D-LiDAR 측량 1.80 m로 산정되었고, 각 지형별 평균 홍수위는 Network RTK 측량 4.28 m, D-RGB 측량 4.73 m, D-LiDAR 측량 4.25 m로 산정되어 D-RGB 측량보다 D-LiDAR 측량의 평균 하상고와 평균 홍수위의 측정 오차가 각각 0.21 m, 0.13 m로 작게 나타나 후자의 측량방법이 정확한 것을 확인하였다.
