

1. 서 론
2. 연구방법
2.1 물환경 계측 자율무인선(USV) 제원
2.2 자율무인선(USV)를 활용한 물환경 계측 방법
2.3 다중통신망 스위칭 알고리즘
3. 성능 분석
3.1 성능 지표
3.2 성능 분석 결과
3.3 다중통신망 기반 물환경 데이터 품질
4. 결 론
1. 서 론
물환경 계측, 수자원 관리, 안보 등 다양한 분야에서 자율무인선(USV)의 활용 범위가 확대되고 있다. 특히, 하천 및 호소의 수리·수질 현장 계측에 자율무인선(USV)을 적용할 경우, 사람이 접근하기 어려운 지역의 시공간적 고해상도 모니터링이 가능하다는 이점이 있다. 그러나 자율무인선(USV)이 성공적으로 임무를 수행하기 위해서는 육상관제시스템(GCS)과의 신뢰성 높고 지연시간이 낮은 양방향 데이터 통신이 필수적이다.
Sotelo-Torres et al. (2023), Lv et al. (2025) 등 국내외 여러 연구에서 자율무인선(USV) 기반 수질 모니터링 시스템 개발을 추진해왔으나, 대부분 연구가 센서 개발, 시스템 통합 또는 자율운항 알고리즘을 중심으로 연구되었으며, 호소 중앙부에서 빈번하게 나타나는 통신 음영지역에서 실시간 데이터 전송 신뢰성 문제에 대한 해결은 미흡했다. 연직 수질 계측(Vertical Profiling) 임무 수행 중 통신이 단절되는 문제가 발생하는 경우 실시간으로 수심별 데이터를 확인하면서 임무를 조정하기 어려워 수질 데이터의 연속성과 신뢰성이 저하되는 문제가 발생할 수 있다.
대형 호소 및 하천-호소 복합 수체에서는 계절적 성층화가 규칙적으로 발생하며, 성층 구조의 형성 여부는 용존산소(DO) 분포, 영양염 농도, 내부부하 발생 가능성 등 수환경 전반에 중대한 영향을 미친다. 이러한 성층 구조는 단기간에도 급격히 변화할 수 있어 연속적인 연직 수온·DO 계측이 필수적이다(Mahadevan et al., 2010). 그러나 성층화 감시는 단순 표층 모니터링만으로는 한계가 있으며, 수직 프로파일링 자료가 실시간으로 확보되지 않으면 성층 강도 판단에 오류가 발생할 수 있다. 또한, 강우 후 유입되는 탁수 플룸, 고농도 영양염 유입, 조류 번성과 같은 수환경 현상은 수 시간 내에도 빠르게 변동한다(Kim, 2016). 이들 현상은 특정 수심대에서만 나타나는 경우가 많아 실시간 연직 프로파일 자료 확보가 무엇보다 중요하다. 특히 조류 고농도층은 내부파나 유입수 온도 차에 따라 갑작스럽게 심도가 변하며 이동할 수 있는데, 통신 지연 및 음영으로 실시간 데이터를 확인할 수 없을 경우, 조기 경보 시스템이 작동하지 못할 우려가 있다(HRBMC, 2024). 기존 고정식 부이 기반 모니터링은 특정 지점의 단일 수심 정보만 제공하여, 공간적으로 이질적인 호소·하천 환경 전체를 파악하는 데 근본적인 한계를 갖는다(Stevens et al., 2025). 이동경로가 제한되지 않은 USV 기반 측정은 이러한 한계를 극복할 수 있지만, 이는 통신 안정성이 전제될 때만 가능하다. 통신 음영구간에서는 데이터 누락으로 이러한 문제가 반복된다. 따라서 성층화 모니터링을 위해서는 음영구간에서도 안정적 계측을 보장하는 다중통신망 기반의 실시간 데이터 확보가 필수적이다.
일부 하천이나 대형 호소의 중앙 수역에서는 지형적 제약 및 통신 기지국 밀도 문제로 인해 LTE 통신 음영지역이 발생하기 쉽다. 이러한 통신 단절은 실시간 수질 모니터링 데이터의 누락이나 긴급상황 발생 시 자율무인선(USV) 원격제어 명령 지연을 초래하여 임무 신뢰성과 안전성을 저해하는 기술적 한계로 작용한다. 전통적인 VHF 통신은 데이터 전송률이 낮고, 정지궤도(GEO) 위성통신은 넓은 커버리지에도 불구하고 수백 ms에 달하는 긴 지연시간(Latency) 때문에 실시간 제어가 중요한 자율무인선(USV)의 자율운항이나 모니터링 응용에는 부적합하다. 해양수산부는 LTE 해상 광대역망(LTE- Maritime)을 구축·운영하고 있으나, 호소와 하천은 구축 대상이 아니므로 여전히 LTE 음영 지역이 나타난다.
최근 저궤도(LEO) 위성통신 기술, 특히 Starlink는 짧은 지연시간(20~40 ms)과 고속데이터 전송을 통해 이러한 한계를 극복하는 대안이 될 수 있다. Katsouras et al. (2024)는 하이브리드 통신시스템의 필요성을 제시하였다. 통신 인프라가 불안정한 수역에서 자율무인선(USV)의 안전한 운항 및 안정적인 모니터링 데이터 확보를 위해 육상망(LTE)과 비육상망(LEO)을 결합하는 다중통신망 기술 도입이 필수적이다.
물환경 계측을 위한 자율무인선(USV)의 안전한 운항을 위해서는 통신망의 지연시간이 짧아야 한다. LTE 음영지역에서 GEO 위성통신을 대체로 사용할 수 있지만 지연시간이 500 ms 이상으로 자율무인선(USV)의 실시간 제어에는 적합하지 않다. 자율무인선 운항 중 예상치 못한 상황 발생 시, 긴급 제어 명령(Emergency Stop, 경로 수정)은 가능한 한 짧은 지연으로 전송되어야 인명 및 장비 손실을 예방할 수 있다. LTE가 유실된 상황에서 GEO 위성의 500 ms 이상 지연시간은 자율무인선(USV)의 실시간 제어에 적합하지 않다. Table 1에 제시된 Starlink (Starlink Specifications, 2025)에 따르면 지연시간이 20 ~ 40 ms로 짧아 LTE와 대등하거나 더 우수하다.
Table 1.
Main communication network characteristics
본 연구는 물환경 계측을 위한 자율무인선(USV)에 필요한 통신환경 제약을 극복하기 위하여 LTE 통신망과 Starlink 저궤도(LEO) 위성 인터넷 서비스를 결합한 자율무인선 다중통신망 시스템을 설계하고 그 성능을 분석하였다. Starlink는 LEO 위성망의 특성상 짧은 지연시간과 높은 대역폭을 제공하여, 통신 음영지역에서도 실시간 수리·수질 데이터의 전송 안정성을 확보하기 위한 대안이 될 수 있다. 다중통신망 기반 통신시스템을 물환경 계측 자율무인선(USV)에 적용하여, 통신품질 저하 시에도 실시간 데이터 확보가 가능한 고신뢰 수리·수질 모니터링 체계를 제안하였다.
2. 연구방법
2.1 물환경 계측 자율무인선(USV) 제원
본 연구에 사용한 자율무인선(USV)은 길이 5.5 m, 중량 1.3 t (톤)의 물환경 계측용 플랫폼으로 수리·수질특성을 모니터링하기 위해 선박 장착형 음향 도플러 유속계, 다항목 수질 센서 등 다양한 장비를 탑재하여 운영할 수 있다(Fig. 1). Table 2에 물환경 계측 자율무인선(USV)의 기능과 성능을 제시하였다. 최고속도는 8 knots로 강한 홍수기가 아닐 경우 대부분 흐름 환경에서 운영할 수 있다. 수질센서의 연직 프로파일링 등의 작업 시 고정 위치 유지가 필요하며, 8 m 이하의 위치 유지 성능을 확보하였다. 또한, 추가 충전 없이 약 10시간 동안 운영 가능하다.

Table 2.
Specifications of autonomous unmanned water environment measurement vehicles
2.2 자율무인선(USV)를 활용한 물환경 계측 방법
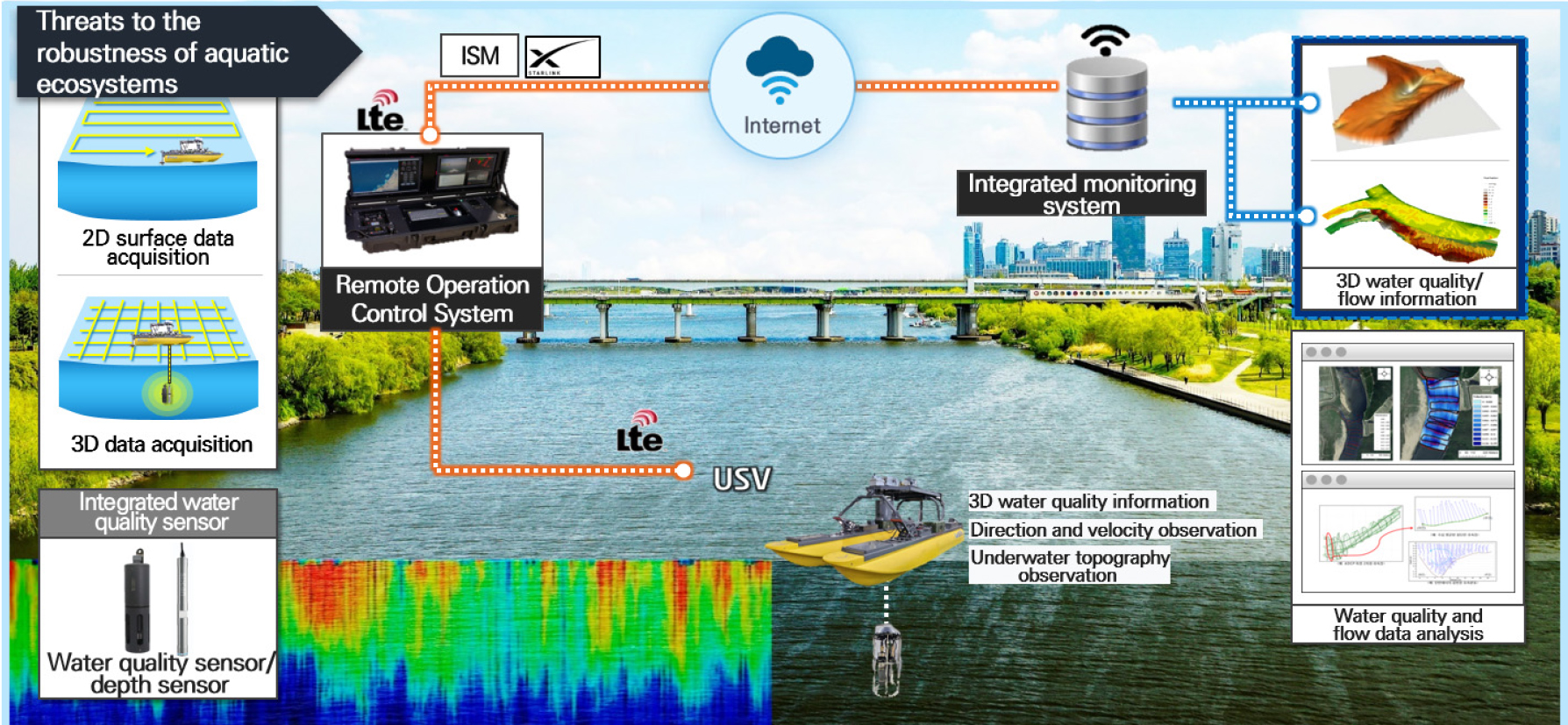
본 연구에서 사용한 물환경 계측용 자율무인선(USV)은 하천이나 호소에서 정해진 정점을 이동하면서 각 정점별로 다항목 센서를 연직적으로 프로파일링하여 수온, DO, EC, 탁도 등의 입체적인 구조를 측정할 수 있다. 이를 통하여 표층 녹조, 성층 강도, 저산소층, 탁수층과 같은 입체적인 현상들을 파악할 수 있고 원하는 수심에서 현장 시료를 채수할 수도 있다. 또한, 사전에 설정된 측선을 따라 자율 이동하며 ADCP (Acoustic Doppler Current Profiler)와 같은 다양한 도플러 방식 유속계를 이용해 유속·유향 단면 분포를 측정하고 지천 유입수의 이류, 플룸 확산 등 수평적 흐름 특성을 파악할 수 있다. Fig. 2과 같이 자율무인선(USV)과 센서를 수평·연직적으로 이동하면서 입체적인 수리·수질 특성 자료를 통합적으로 수집하고 실시간으로 자료를 송신한다. 이와 같은 계측 작업은 연직구조와 수평분포가 뚜렷한 호소·하천의 공간적 이질성을 반영할 수 있어야 한다.
환경부는 수질 보전 대상 공공수역에 대한 수질 현황을 종합적으로 조사하여 수질 변화 추세를 파악하고 주요정책 사업의 효과를 분석하며 장래 수질보전정책 수립을 위한 기초자료로 사용하기 위하여 물환경측정망을 운영하고 있다(ME, 2025). 조사정점은 물의 흐름, 오염원 유입 가능성, 오염부하량, 생물 서식 환경 등 해당 지역의 물리적·생물학적·화학적 특성을 고려하여 대표적 특성을 갖는 위치로 선정된다. 소양호의 경우 상류에 위치한 인제38대교 인근에서 소양댐 앞 부근까지 소양호 전 수역에 걸쳐 5개 정점이 배치되어 있고, 팔당호는 이포보 하류 남한강 수역에 2개, 북한강 말단부에 1개, 경안천 유입부에 1개 그리고 팔당댐 인근에 1개로 총 5개 정점이 배치되어 있다. 물환경측정망 중 수질측정망은 1개월 간격으로 조사하며 수심이 5 m를 넘는 경우 정점별 3개 층에서 시료를 채취한다. 이러한 수질측정망은 본래의 목적을 달성하기 위한 수단으로 적절하게 운영되고 있지만 저면 부근을 중심으로 나타나는 빈산소, 수표면에서 나타나는 녹조, 환경기초시설에서 유입되어 특정 층을 따라 위치하는 방류수 또는 밀도가 유사한 특정 층을 따라 하류로 이류하는 밀도류나 탁수 등을 정밀 탐지는 제한적이다. 이러한 복잡한 3차원 구조를 파악하기 위해서는 고해상도 모니터링이 필요하다(Kim et al., 2020).
HRBMC (2024)는 소양호에서 자율무인선(USV)을 사용하여 유속과 탁도의 종단면 분포를 측정하였다(Fig. 3). 2024년 9월 강우 직후에 소양호 상류 수질측정망 소양강댐5 정점 인근에서 하류 소양강댐 전면까지 소양호 전 수역을 대상으로 하였다. 수면하 20 m에서 40 m 사이에서 하류로 흐르는 흐름이 나타나고 동일한 연직 위치에서 탁수가 분포한다. 환경부 수질측정망 자료를 활용하는 경우 이와 같은 미세구조를 탐지하기 어렵다. 소양호에서 출현하는 탁수는 집중 강우 시 유역에서 발생한 토사 유입에 기인한다. 강우시 유역에서 침식된 퇴적물과 함께 오염물질도 발생하여 호소로 유입되고 이는 호소 환경에 중요한 영향을 미칠 수 있다(Yeom, 2020). 이러한 탁수 이벤트를 효과적으로 측정하고 하류로의 이동 특성, 분포, 특정 지점 도달 시기 예측 등을 위해서는 수평 및 연직방향으로 적정한 위치에서 고해상 측정이 필요하다. 현장 모니터링 시 탁수층을 발견한 경우 해당 층에서 호소수를 채수하여 부유퇴적물이나 총인 등의 실험실 분석이 필요한 경우가 있다. 그리고 탁수층 분포가 공간적으로 균일하지 않으므로 실시간 센서 자료를 확인하면서 조사 위치를 동적으로 변경할 경우 효과적인 모니터링이 가능하다. 탑재된 실시간 카메라 영상을 활용하여 조사지점을 변경하는 경우도 있다. 실시간 카메라는 현장 수면 상황을 파악할 수 있으므로 수면의 녹조나 탁수 분포 등을 파악하면서 조사위치를 변경하거나 추가할 수 있다.
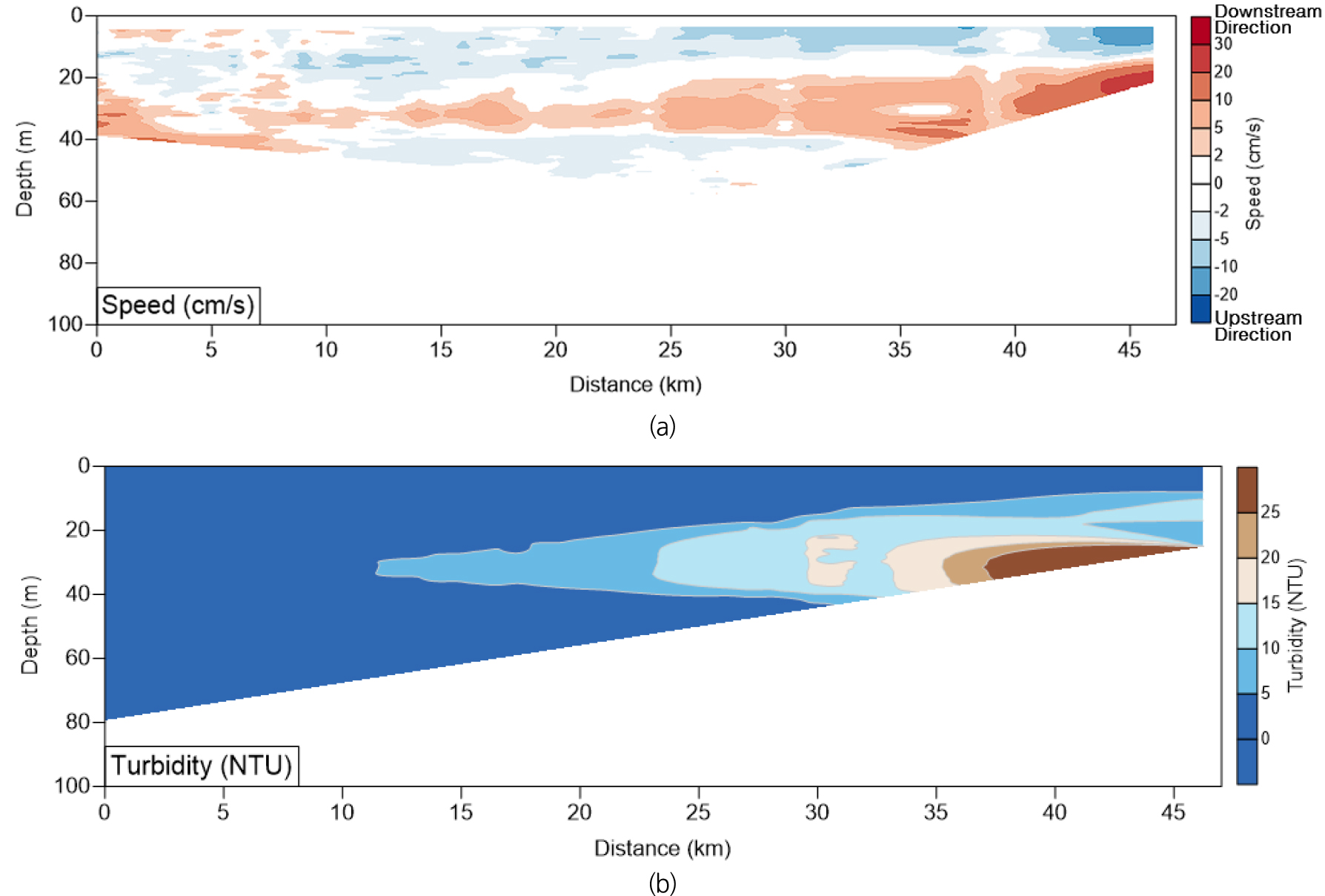
Fig. 3.
Cross-sectional distribution of current velocity (a) and turbidity (b) measured by an autonomous unmanned vessel (USV) in Soyang Lake (HRBMC, 2024)
자율무인선(USV)의 안전한 운항을 위해서는 무중단 통신환경이 전제되어야 한다. 본 연구에 사용된 자율무인선(USV)은 국제해사기구(IMO) 기준, 사람의 개입 없이 자율운항이 가능한 레벨4 단계이지만 선박이 조사자의 가시거리를 벗어나 원거리를 이동하는 경우 선박에 탑재된 실시간 카메라를 활용하여 현장 수면 상황을 감시해야 하는 경우가 발생할 수 있다. 소양호와 같은 호소에서는 선박에 탑재된 카메라를 기반으로 하는 인공지능 객체인식으로 감지하기 어려운 수중 어망이나 구조물을 고정하는 로프 등이 설치된 경우가 많다. 강우 이후에 주변 유역에서 유입되는 쓰레기나 수풀이 수면에 부유하면서 선박 운항을 방해할 수도 있다. 소양호, 팔당호, 대청호 등 주요 대형호소는 대부분 주요 하천의 최상류에 위치하며 안정적으로 식수를 공급하기 위해 상수원으로 활용되는 경우가 많기 때문에 선박의 안전 운항을 위하여 조사자가 선박에 탑재된 실시간 카메라 영상을 주시하면서 운행중 발생 가능한 사고를 사전에 방지할 필요가 있다. 위와 같은 다양한 동적 대응을 위해서는 현장 모니터링 센서, 실시간 카메라 영상 등 자료의 안정적 실시간 전송과 확인이 필요하다.
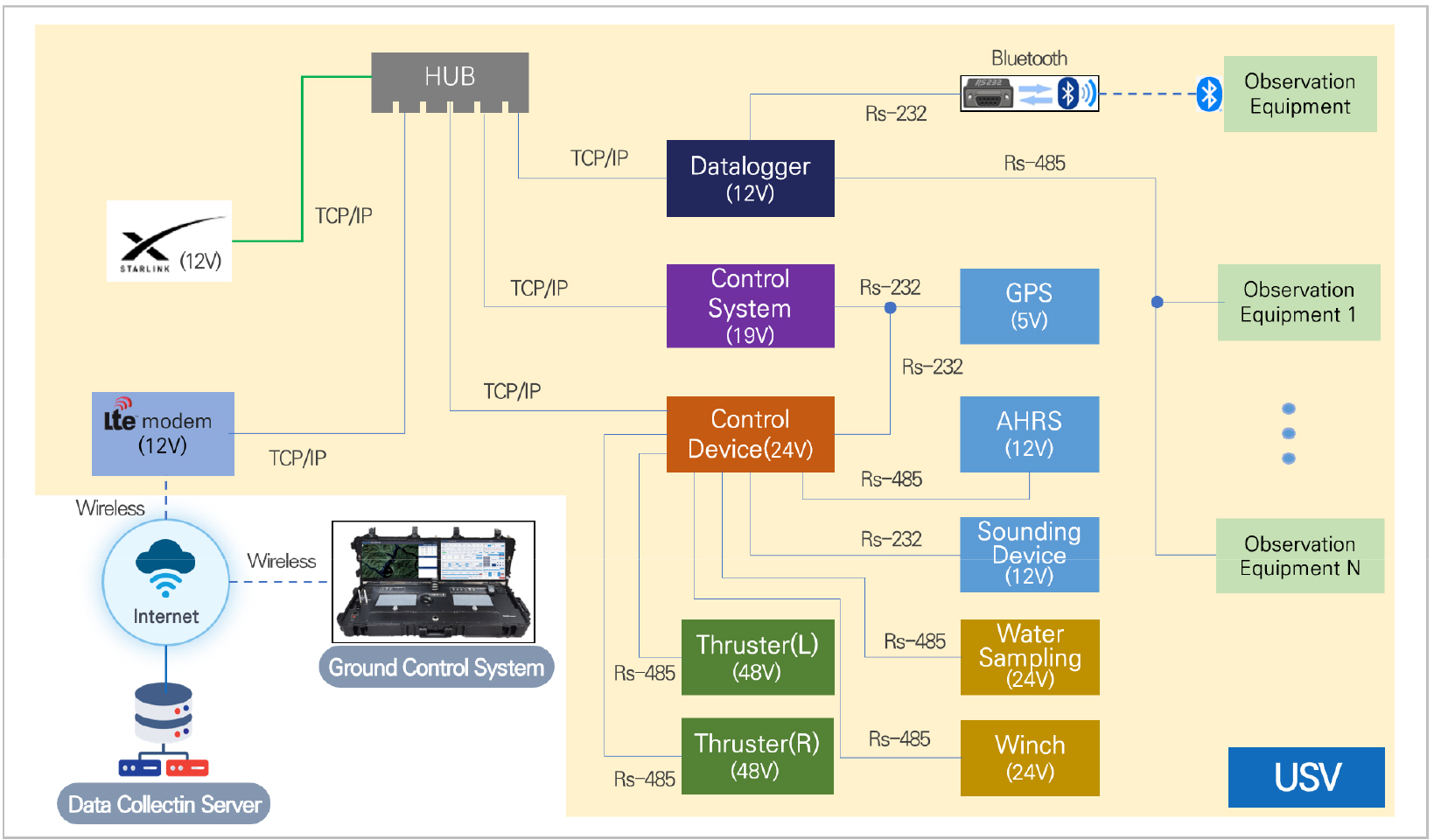
위와 같이 통신이 불안정할 경우 조사 연속성과 장비 운영 안정성이 저하될 수 있다. 통신 단절시 측정된 데이터는 장비 내부에 저장되지만 센서의 하강 상태, 목표 수심 도달 여부, 측선의 연결상태 등을 실시간으로 확인할 수 없게 되어 성층 경계나 플룸 이동과 같은 시·공간적 변화를 조사자가 즉시 반영하기 위한 현장에서의 동적 대응이 어렵다. 본 연구에서는 자율무인선(USV)의 안전한 운항과 안정적인 실시간 수리·수질 데이터 확보를 위해 통신 모듈, 통합 통신 관리 장치(라우터), 자율운항 제어기 그리고 센서시스템을 구성하였다. 고이득 안테나가 적용된 LTE 모뎀과 고성능 평판 위상배열 안테나를 사용하는 Starlink 단말기를 사용하여 통신 연속성 및 복원력을 확보하였다.
2.3 다중통신망 스위칭 알고리즘
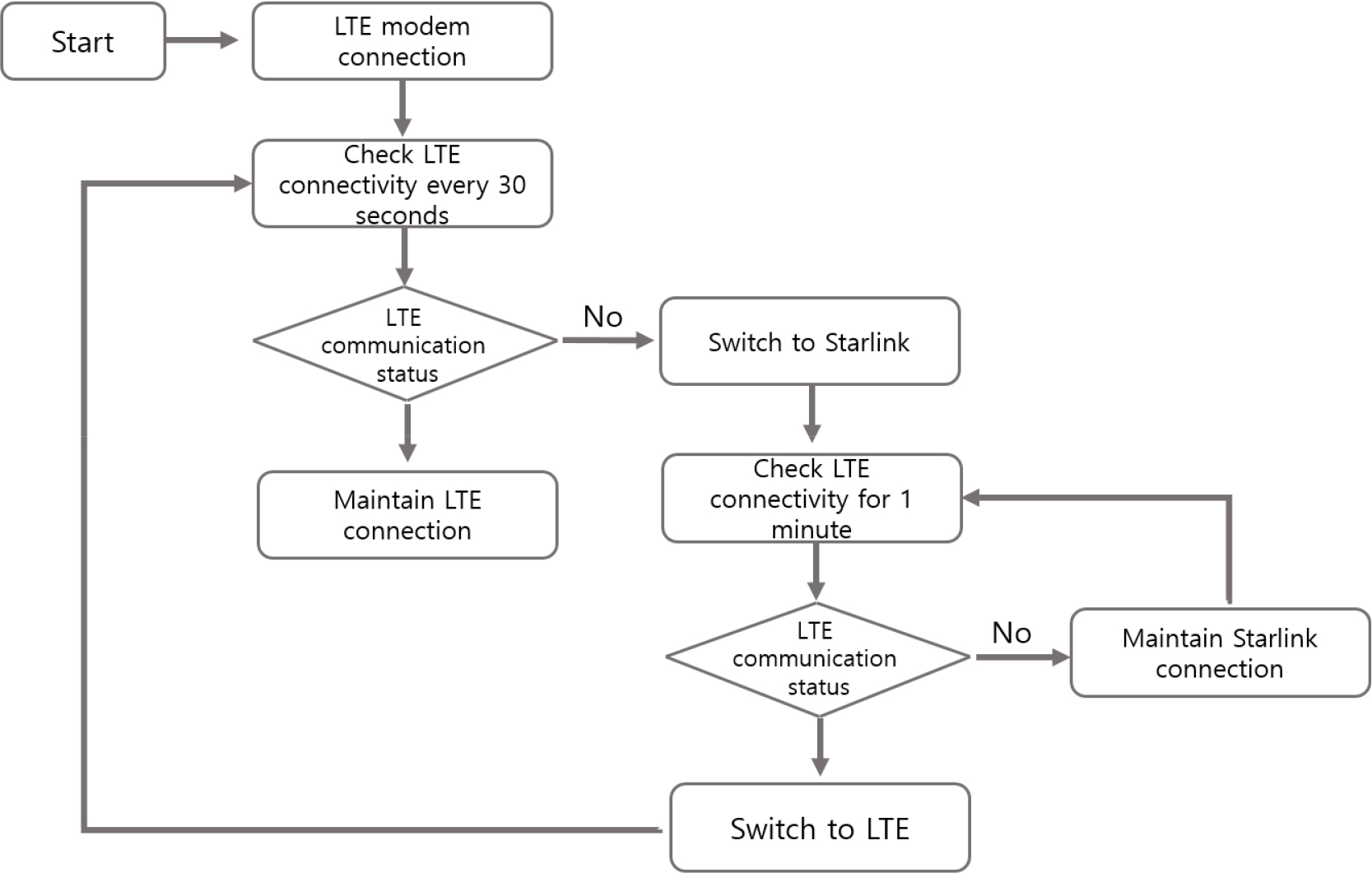
본 시스템은 LTE 통신망의 저렴한 사용료와 Starlink의 광범위한 커버리지 장점을 활용하기 위해 Fig. 4와 같이 LTE를 주 통신망으로, Starlink를 보조 통신망으로 설정하는 우선순위 기반 정책을 채택하였다. 지능형 네트워크 스위칭 메커니즘은 Fig. 5의 흐름도와 같이 LTE 및 Starlink 모듈의 상태를 실시간으로 모니터링하고 정책 기반 라우팅(Policy-Based Routing, PBR)을 적용하여 트래픽을 처리하였다.
2.3.1 우선순위 기반 망 선택(PBR)
Starlink가 ‘대기’ 상태일 때 우선순위가 낮은 대용량 데이터(비실시간 데이터)에 한하여 LTE와 Starlink 두 채널을 동시에 통합(Load Balancing)하여 활용하도록 설정할 수 있다. 이 경우, 실시간 데이터는 항상 최상의 품질 채널(LTE 또는 Starlink)을 사용한다. 송신 데이터의 유형별 우선순위와 망 선택 기준을 Table 3에 정리하였다.
Table 3.
Priority and network selection criteria by data type
2.3.2 핸드오버 관리 및 손실 제어
핸드오버(망 전환) 시 발생하는 통신손실과 지연을 최소화하기 위해 Make-Before-Break 방식을 적용하였다. 이를 위해 LTE 신호품질(RSRP, SINR)이 설정한 임계치(RSRP < -110 dBm 또는 SINR < 0 dB) 이하로 일정 시간(Dwell Time) 지속될 때 Starlink로 전환하도록 기준을 설정하였다. 순간적인 신호 변동으로 인한 불필요한 전환을 방지하기 위해 전환 조건이 충족되더라도 일정 시간 동안 현재 망에 머무르도록 하였으며, 잦은 망 전환을 억제하기 위해 최소 체류시간(Dwell Time)과 히스테리시스(Hysteresis)를 함께 적용하였다. 특히 LTE로 복귀할 때는 Starlink로 전환되었던 시점보다 더 높은 임계치를 요구하여 복귀 과정의 안정성을 확보하였다.
2.3.3 다중통신망 자동전환을 위한 MikroTik 라우터 기반 구현
국내 상용 모뎀은 CLI 기반의 사용자 정의 스크립트 실행 기능이 제한적이어서 네트워크 품질 감시 및 자동 망 전환 로직을 장비 내부에서 직접 구현하기 어렵다. 이러한 제약을 극복하고 안정적인 외부제어 환경을 확보하기 위하여 Fig. 6의 MikroTik Router OS 기반의 RB5009UG 라우터를 사용하였다. 이 라우터는 유선 라우터이지만 자율무인선 내부 환경에 맞게 설치 및 방수 처리하여 사용할 수 있다. CLI 기반의 사용자 정의 스크립트 실행 기능을 통해 LTE 모뎀과 Starlink 단말기의 상태를 실시간으로 감지하고, 상기 정책 기반 라우팅(PBR)을 포함한 자동전환기능을 유연하게 구현하였다.

3. 성능 분석
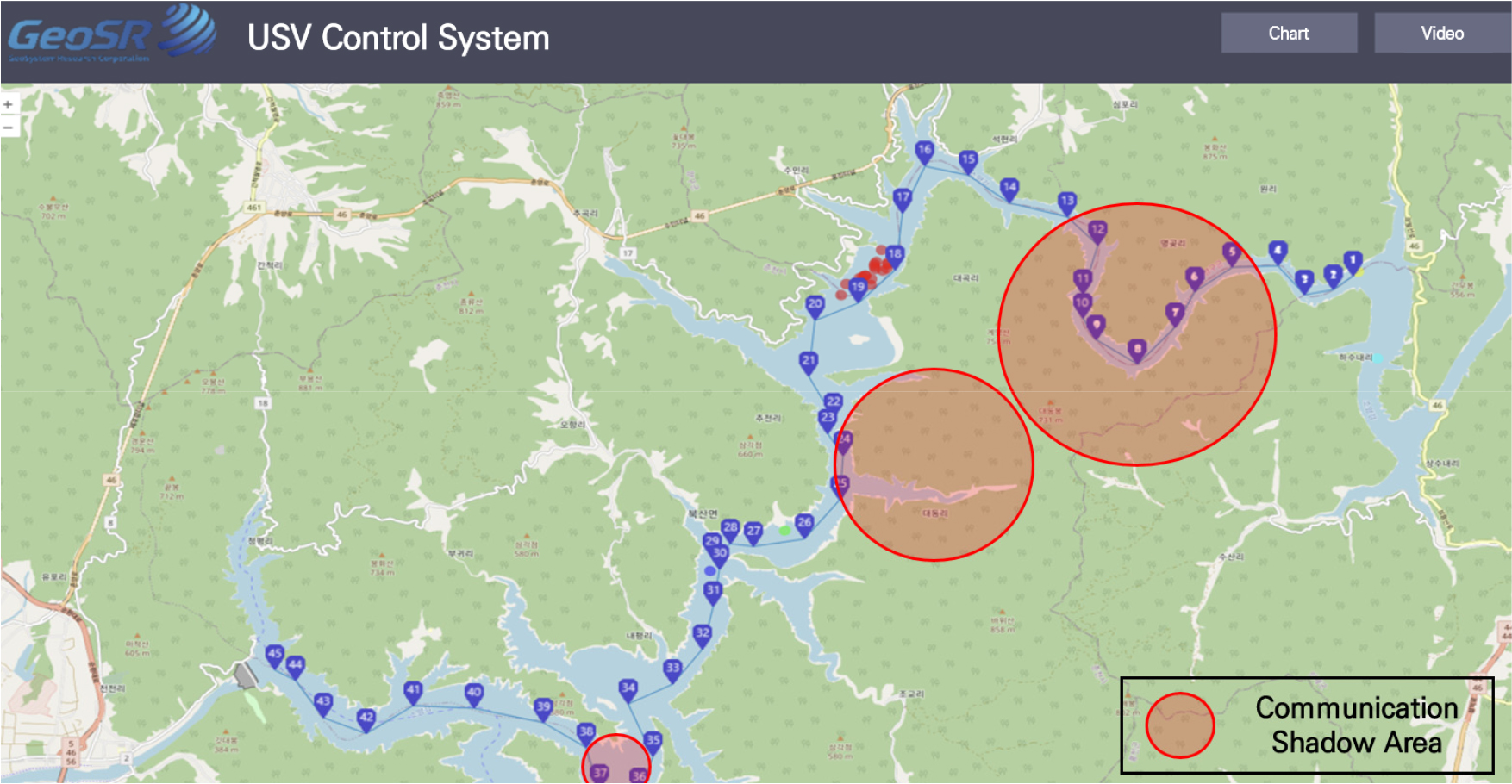
Fig. 7에 제시된 LTE 음영지대를 포함하는 소양호 수역에서 다중통신망 시스템 성능을 평가하였다. LTE와 저궤도 통신(Starlink) 장치를 모두 탑재하고 운영되는 자율무인선(USV)을 활용하였고 Fig. 8과 같이, LTE와 저궤도 통신(Starlink) 장치를 모두 탑재한 채 운영되는 자율무인선(USV)을 활용하였고, 오픈소스 네트워크 시뮬레이터인 NS-3(Network Simulator-3) 기반 확장모델과 현장실측 로그를 병행하여 성능을 분석하였다(ns-3 Consortium, 2025).
3.1 성능 지표
자율무인선(USV)에 적용된 LTE-Starlink 다중통신망 시스템의 성능을 평가하기 위해 시뮬레이션 환경을 구축하고 커버리지, 지연시간, 유효 전송속도와 핸드오버 성능을 평가하였다. 분석에 사용된 성능지표를 Table 4에 제시하였다. 통합 커버리지는 공간적 이질성이 큰 호소에서 매우 중요한 지표이다. LTE 음영구간에서 데이터가 누락될 경우, 조류 고농도층의 이동 경로 또는 탁수 플룸의 확산 범위를 정확히 판단할 수 없게 된다. 호수 중앙부는 성층 구조가 가장 뚜렷하게 나타나는 구간이므로 음영 구간 해소가 필수적이다. Fig. 8에서 Starlink 전환 이후에도 지연시간이 40 ms 내외로 유지되어 센서 연직 하강 중에도 특정 수심에서 실시간으로 수온, DO, EC 등의 변화를 확인할 수 있었다. 탁수 플룸이나 조류 고농도층은 수심별 밀도 차에 따라 급격히 변화할 수 있는데, 통신 음영으로 인한 데이터 누락은 이러한 현상의 분포를 잘못 해석하게 만드는 주요 원인이 된다. 이러한 통신 성능지표는 수리·수질 분석의 정확도와도 밀접하게 연결된다. 지연시간이 증가하면 DO, Chl-a, EC 등의 연직 센서 데이터가 실시간으로 수신되지 않아 저산소층의 형성 여부나 조류 고농도층의 연직 위치를 즉시 파악하기 어렵다. 이는 성층 강도 및 혼합 구조 해석에 직접적 오류를 발생시킬 수 있다. 본 연구에서는 Starlink 전환 구간에서도 연속적인 데이터 확보가 가능해짐으로써 플룸 이동과 조류 확산을 안정적으로 추적할 수 있었다. 원활한 망 전환, 즉 핸드오버 성능의 확보를 통해 기존 LTE 단독 기반 계측에서 흔히 발생하던 프로파일 단절 문제를 현저히 감소시키고 현장 상황을 실시간으로 파악하여 조사위치 변경, 채수위치 선정, 조사경로 변경 등 다양한 동적 대응을 가능하게 하였다. 수온, DO, EC, 유향, 유속 등 수리·수질 자료뿐 아니라, 조류 분포 확인을 위한 영상 자료 또는 LiDAR 수면 데이터 등 고해상도 다항목 자료를 동시에 전송하려면 충분한 데이터 전송속도가 필요하다. Starlink는 이러한 대용량 데이터를 실시간으로 송신할 수 있어 수환경 분석의 해상도와 신뢰도를 높인다.
Table 4.
Performance evaluation metrics for the LTE–starlink hybrid communication system

3.2 성능 분석 결과
3.2.1 통합 커버리지
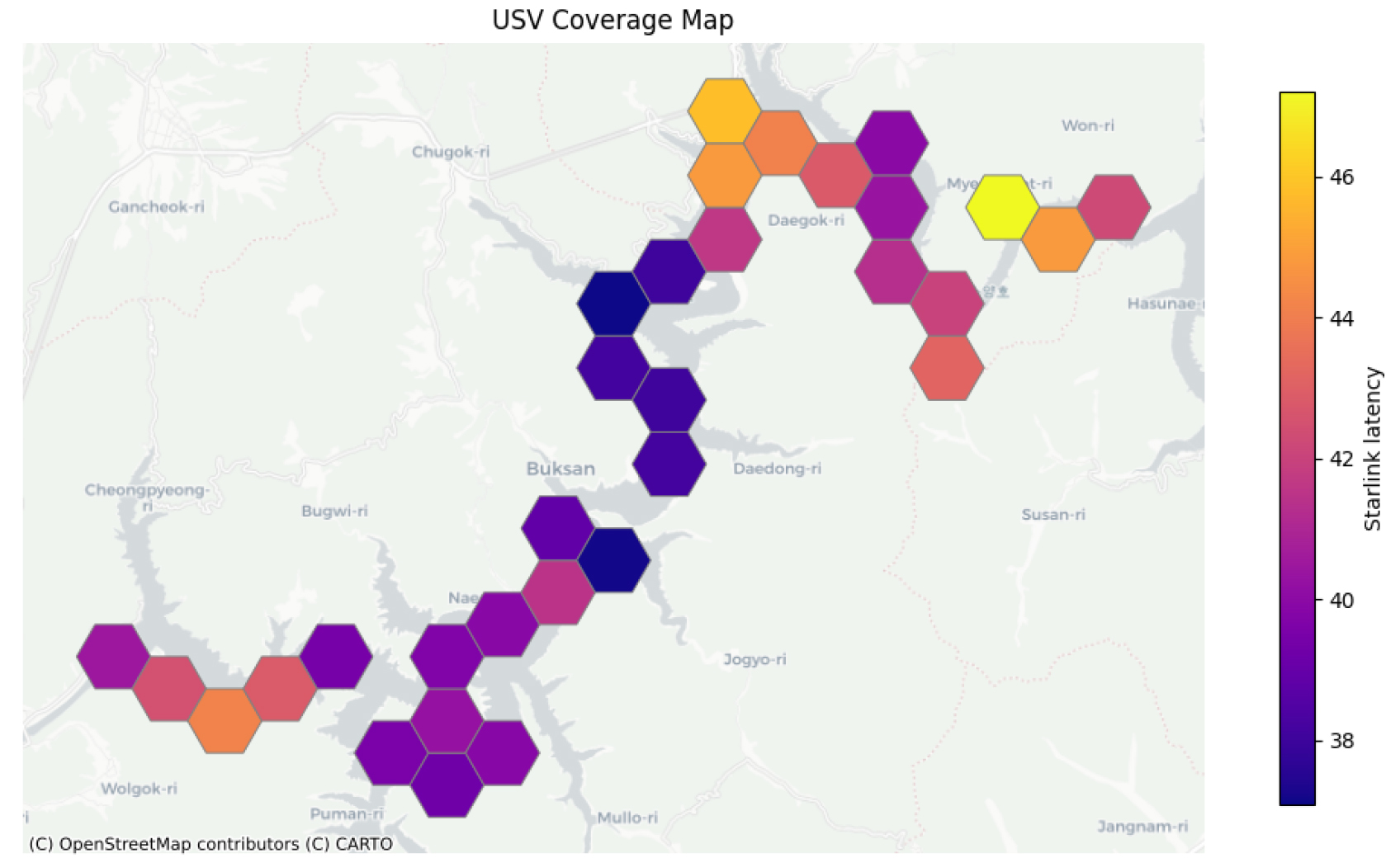
소양호 현장 시뮬레이션 결과, LTE 단독 커버리지는 95.25 % 였으나, 다중망(LTE-Starlink)을 병용할 경우 커버리지는 99.90 %로 측정되었다. Starlink는 이론적으로 전 구간 서비스를 제공하지만, 망 전환 과정에서 순간적 지연으로 인해 0.10 % 미전송이 발생하였다. 그러나 점유율이 낮고 즉각적인 망 전환으로 인하여 시스템 운영에는 영향을 미치지 않았다. 이는 Fig. 7에 제시된 LTE 음영지역에서 Starlink로 망 전환된 경우 Fig. 9와 같이 짧은 지연시간을 확보하여 안정적인 데이터 전송이 가능함을 의미한다.
3.2.2 엔드-투-엔드 지연시간(End-to-End Latency)
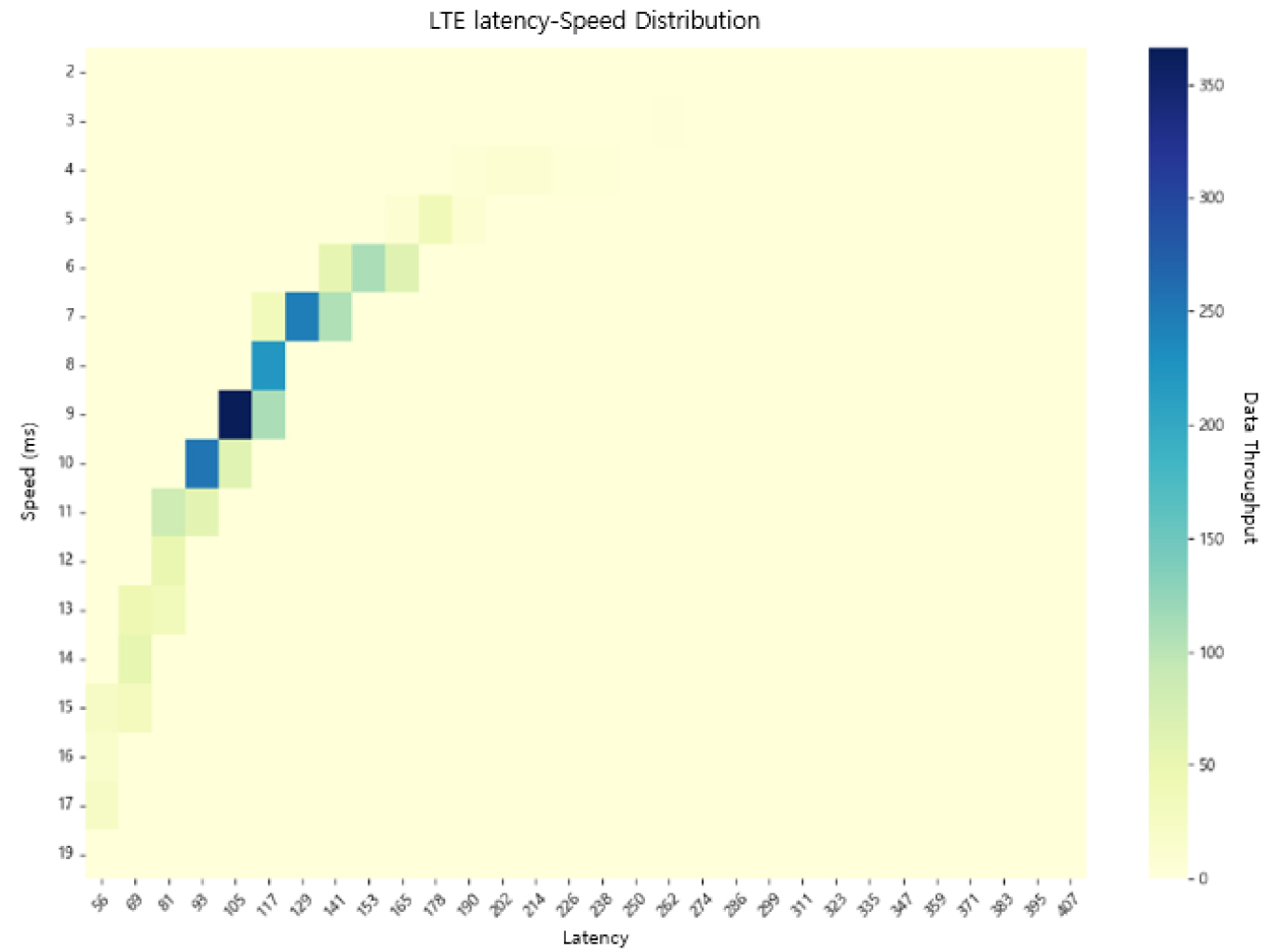
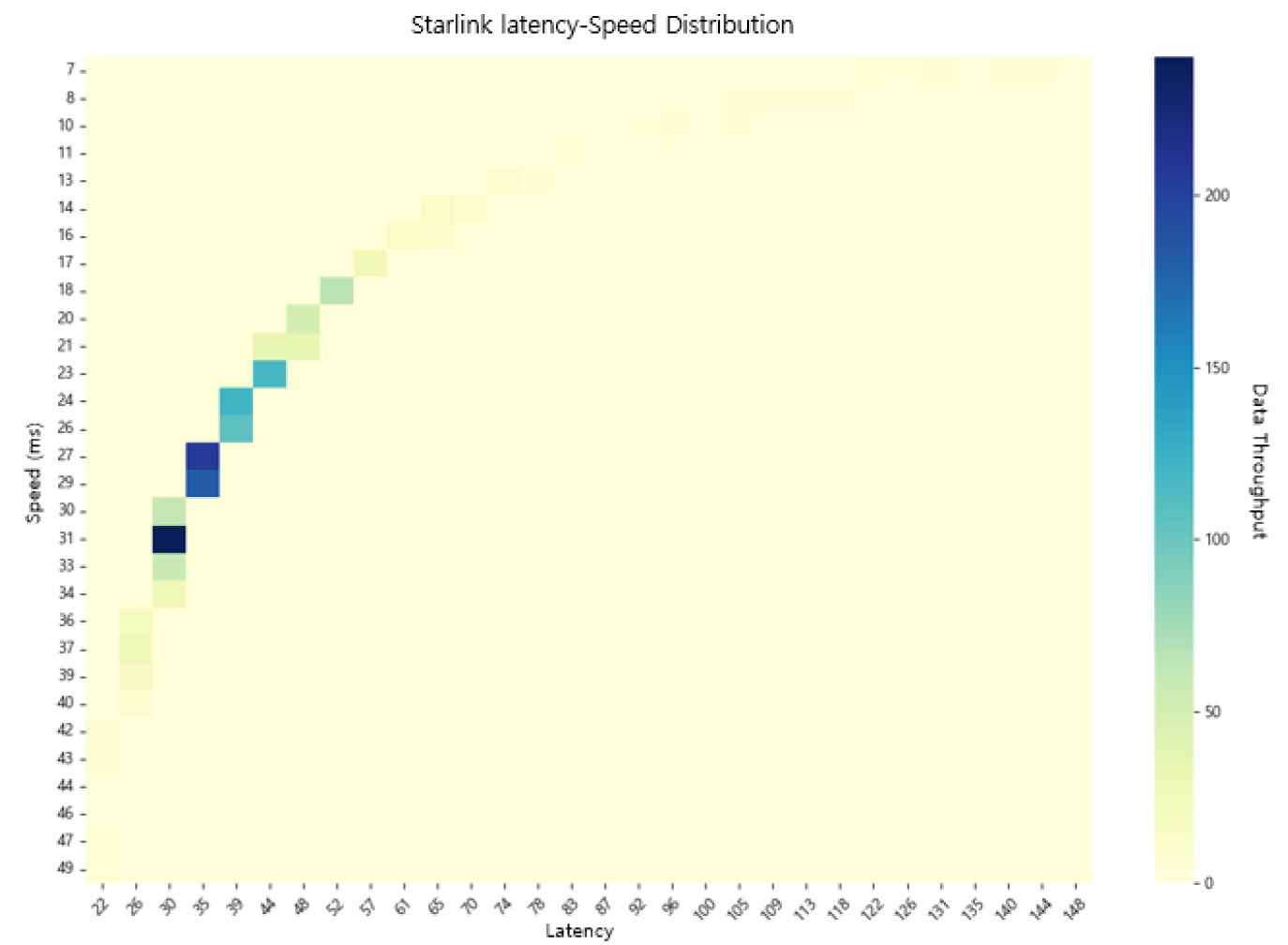
LTE-Starlink 다중통신망 시스템의 엔드-투-엔드 지연시간 (End-to-End Latency) 목표치를 150 ms로 설정하였다. 소양호에서 LTE 지연시간은 50~178 ms이고 100 ms 내외에서 출현율이 가장 높다(Fig. 10). 도심지역보다 범위가 크며 목표치인 150 ms 이상의 긴 지연시간도 빈번하게 나타난다. 반면 Starlink 지연시간 범위는 20~145 ms이고 35~37 ms 구간에서 빈번하게 나타나 목표치를 모두 만족한다(Fig. 11).
지연에 민감한 실시간 제어 신호와 수심별 DO, EC 등의 센서 데이터는 지연이 짧은 경로로 우선 전송되도록 설정되었으므로, 실시간 계측되는 모니터링 자료의 안정적인 송신이 가능하다. 이는 불안정한 통신으로 인해 물환경의 실시간 변화를 감시하면서 모니터링 할 수 없었던 기존 모니터링 방법을 개선할 수 있다.
3.2.3 유효 데이터 전송속도(Effective Throughput)
자율무인선(USV)을 활용한 3차원 계측은 기본적으로 실시간 개념을 가지고 있으며 단일 항목이 아닌 다양한 항목을 복합 계측하여 모니터링 효과를 극대화하는 특징을 가지고 있다. 대용량 자료의 실시간 송신을 전제로 하고 있으므로 데이터의 전송속도는 중요한 성능지표이다. Starlink 사용환경에서 데이터전송속도는 140 Mbps로 확인되었으며, 이는 관측카메라 영상, 각종 센서 스트림, 원격제어 등의 자료를 동시에 업로드하더라도 전송 지연이나 누락 없이 실시간 송신이 가능한 수준이다. 동일 지점에서 LTE 단일 통신망의 전송속도는 약 5 Mbps로 낮게 나타나 Starlink가 상대적으로 높은 대역폭을 제공함을 확인하였다.
3.2.4 핸드오버(망 전환) 성능
LTE-Starlink 간 핸드오버는 Fig. 12와 같이 1~3초 이내에 완료되어 망 전환 시 발생할 수 있는 패킷손실을 최소화할 수 있다. 이는 Make-Before-Break 방식과 Dwell Time, Hysteresis의 적용으로 잦은 네트워크전환(Ping-Pong)을 방지하여 실시간으로 측정되는 물환경 모니터링 자료를 안정적으로 송신할 수 있다.

3.3 다중통신망 기반 물환경 데이터 품질
다중통신망 기반 통신 안정성은 물환경 계측자료의 연속성과 해석 가능성에 중요한 영향을 미친다. LTE-Starlink 다중통신망을 적용한 결과, 다항목 수질센서의 연직 프로파일링 시 통신 음영 없이 자료가 안정적으로 확보되어 성층 경계, 저산소층, 탁수층 등 주요 수질항목의 분포를 입체적으로 파악할 수 있었다. ADCP를 활용한 단면 유속 조사에서도 자료 누락 없이 유량 산정과 흐름 구조 파악에 방해되는 불확실성이 감소하였다. 이는 조사 과정에서 관측자료의 공간적 연속성을 확보하고 물환경 데이터의 품질을 안정적으로 유지할 수 있는 기술적 기반을 제공하였다.
4. 결 론
자율무인선(USV)을 물환경 모니터링에 사용하기 위하여 안정적이고 효율적인 자율운항을 지원하고 물환경 계측 데이터의 실시간 전송 신뢰성을 확보하고자 LTE와 Starlink LEO 위성 통신 서비스를 통합한 다중통신망 시스템을 개발하였다. 사용료가 저렴한 LTE 통신망과 커버리지가 넓은 Starlink 각각의 장점을 활용하기 위해 LTE를 주 통신망으로, Starlink를 보조 통신망으로 설정하는 우선순위 기반 정책을 채택한 지능형 네트워크 스위칭 메커니즘을 개발하였다. 통신상태를 실시간으로 모니터링하고 정책 기반 라우팅(Policy-Based Routing, PBR)을 적용하여 트래픽을 처리하고 Make-Before- Break 방식을 사용하여 망 전환 시 발생할 수 있는 통신손실과 지연을 최소화하였다.
개발된 다중통신망 시스템의 성능을 평가하기 위하여 소양호를 대상으로 현장 시뮬레이션을 수행하였다. 다중통신망 시스템의 통합 커버리지, 엔드-투-엔드 지연시간, 유효 데이터 전송속도, 핸드오버 성능을 평가지표로 설정하고 각각의 성능을 분석하였다.
LTE 단독 커버리지는 95.25%였으나, 다중망(LTE-Starlink)을 병용할 경우 커버리지는 99.90 % 이상으로 측정되어 LTE 통신 음영 구간에서도 Starlink를 통해 통신을 유지함으로써 모니터링 데이터의 신뢰성과 연속성을 확보할 수 있었다. 이는 소양호, 대청호 등 통신 음영지역에서 불가능했던 3차원 무인 정밀 모니터링, 장기 센서 모니터링 등 자율무인선(USV)을 활용한 다양한 기법의 모니터링이 가능함을 의미한다.
LTE 통신상태가 좋지 않은 소양호에서 LTE 지연시간은 50~178 ms로 나타나 도심지역보다 범위가 크며 목표치인 150 ms 이상의 긴 지연시간도 빈번하게 나타난 반면, Starlink를 함께 사용하는 다중통신망 시스템을 적용하는 경우 지연시간은 20~145 ms로 목표치를 만족하여 실시간으로 계측되는 모니터링 자료의 안정적인 송신이 가능하였다.
자율무인선(USV)를 활용한 3차원 계측은 기본적으로 실시간 개념을 가지고 있으며 단일 항목이 아닌 다양한 항목을 복합 계측하여 모니터링 효과를 높이는 특징을 가지고 있다. 이는 대용량 자료의 실시간 송신을 전제로 하고 있으므로 데이터의 전송속도는 중요한 성능지표이다. Starlink 사용 환경에서 데이터 전송속도는 140 Mbps로 다양한 데이터의 실시간 업로드가 가능함을 확인하였다.
LTE에서 Starlink로의 망 전환은 1~3초가 소요되어 데이터의 연속성을 유지하는 것으로 나타났다. 일반적으로 센서의 측정빈도는 연속측정의 경우 5~10분, 연직측정의 경우 1초 내외로 설정하는 경우가 많다. 연직 측정 시, 선박이 정점에 도착하면 통신상태를 점검한 후 센서를 하강하기 때문에 모니터링 기법을 적용하여 데이터 손실을 막을 수 있다.
최근 인명사고, 관측 기간, 악천후 등의 문제를 해결할 수 있는 방안으로 물환경 모니터링에 자율무인선(USV)을 적용하는 것이 각광을 받고 있으며, 본 연구에서 개발한 다중통신망을 적용함으로써 자율무인선(USV)의 안정성과 활용 가능성을 높일 수 있다. 본 연구의 다중통신망 기반 USV 시스템은 성층화 감시, 조류 번성 조기경보, 탁수 플룸 추적, 급격한 DO 저하 탐지 등 다양한 물환경 변화를 실시간으로 모니터링하기 위한 핵심 기술을 제공한다. LTE 단독 관측에서 반복되던 데이터 누락 문제를 효과적으로 해결하여 수환경 모니터링의 정확도를 향상시키기 위한 기술을 확보하였다. 또한, 기존 부이 기반 모니터링은 고정 위치에서 센서를 활용하여 수온, DO, EC 등 수질항목의 연직분포만 모니터링하는 공간적 한계로 인해 3차원적 변동특성을 탐지하기 어려웠다. 다중통신망 기반 USV는 이러한 한계를 극복해 고해상도 3차원 자료 확보를 가능하게 하였으며, 이는 향후 국지적인 물환경 문제 감시, 성층·혼합 등 입체적인 수체 특성 모델링, 조류 확산 예측 등 다양한 물환경 분석을 위한 기반 자료를 확보하는 데 활용될 수 있다.
