

1. 서 론
2. 연구지역 및 데이터
2.1 연구지역
2.2 데이터
3. 방법론
3.1 Otsu 기법
3.2. SVM 기법
3.3 Confusion Matrix
3.4 Receiver Operating Characteristic Curve
4. 연구 결과 및 토의
4.1 Otsu 기법 및 SVM 영상 정확도 비교 분류
4.2 위성영상을 활용한 침수 전후 수체변화 분석
4.3 침수 피해 지역 파악 및 분석
5. 결 론
1. 서 론
기후변화로 인한 기온 상승은 대기 불균형을 유발하고 일부 지역의 강우량은 증가하는 반면 다른 지역의 강우량은 감소하는 현상이 발생하고 있다(Tabari, 2020). 침수 피해는 광범위한 지역에서 발생하고 있어 지역 사회 시스템에 막대한 악영향을 끼치고 있다. 일반적으로 침수 피해는 장기적인 강우량 또는 극한 강우로 발생하고, 기후변화에 의한 영향으로 발생 빈도와 특성이 변화하고 있어 침수 피해에 대응하기 위해서 지속적인 침수 탐지 기법이 필요하다.
인공위성 자료를 활용한 침수 탐지는 광범위한 지역의 수체를 효율적으로 탐지할 수 있다. 최근 Martinis et al. (2022)와 Soria-Ruiz et al. (2022) 등과 같은 다양한 관련 연구가 수행되고 있으며, 이를 통하여 인공위성 자료의 활용성이 크게 부각되고 있다. 유럽 우주국(European Space Agency, ESA)은 지속적인 감시 및 재난 관리를 목적으로 개발한 Sentinel-1 및 Sentinel-2 인공위성 시스템을 통해 관련 데이터를 제공하고 있다. Ye et al. (2016)에 따르면 McFeeters (1996)이 제안한 정규수분지수(Normalized Difference Water Index, NDWI)를 Sentinel-2 광학영상에 적용하여 수체 및 비수체를 높은 정확도로 분류하는 연구가 수행되고 있다. 수체에서 근적외선 파장이 낮은 반사도를 보이는 반면, 비수체에서는 높은 반사도를 갖는 특성에 의해 수체와 비수체 차이를 감지한다. 광학위성의 경우 다중밴드 활용 및 NDWI 지수를 통해 수체를 모니터링하기 적합하나, 주야간 및 구름 등 기상 조건에 영향을 받아 지속적인 자료 확보가 어려운 실정이다(Bioresita et al., 2018; Tavus et al., 2018). 침수 피해 발생 시 폭우로 인한 기상 현상이 많기 때문에 구름에 영향을 받는 광학위성은 지속적인 침수 피해 모니터링에 한계가 있다. 따라서 본 연구에서 Sentinel-1 검증자료로서 Sentinel-2 MSI를 활용하였다.
Sentinel-1은 합성 개구 레이더(Synthetic Aperture Radar, SAR) 센서를 기반으로 마이크로파 레이더를 사용하여 주야간 및 구름의 영향을 받지 않아 지속적인 모니터링이 가능하다(Pulvirenti et al., 2021). SAR는 지구 표면의 후방산란계수 신호를 측정하여 지형과 물체를 감지하는 레이더 기술로 후방산란계수 강도에 따라 수체와 비수체를 구분할 수 있다(Ruzza et al., 2019). 후방산란계수 강도 분류 방법은 미리 정의된 임계값을 기반으로 수체와 비수체를 구분하고, 기준 임계값 보다 낮은 경우에 침수되는 것으로 분류한다. 즉, 수체의 낮은 거칠기는 정반사를 발생시켜 후방산란계수가 낮게 나타나는 반면, 비수체의 높은 거칠기는 산란을 발생시켜 후방산란계수가 높게 나타났다(Lee et al., 2022). 이를 통해 후방산란계수 강도에 따라 수체와 비수체를 분류할 수 있음을 확인하였다.
후방산란계수를 분류하는 방법에는 임계값을 설정하여 클래스를 분류하는 방법과 머신러닝 알고리즘을 적용하고 분류모델을 생성하는 기법이 존재한다. Otsu 기법은 임계값 기법 중 하나로, 두 클래스간 분산의 차이를 최대화하는 최적의 임계값을 산정하여 수체와 비수체를 분류하는 방법이다(Moharrami et al., 2021; Kim et al., 2022). Otsu 기법은 최적의 임계값을 기준으로 수체와 비수체를 분류하여 계산이 빠르고 간단하지만 비수체를 수체로 탐지하는 오탐지가 발생한다(Dong et al., 2023).
본 연구에서는 이러한 한계를 극복하기 위한 방법으로 AI (Artificial intelligence, AI) 알고리즘 중 하나인 서포트 벡터 머신(Support Vector Machine , SVM)을 통해 임계값에 의한 오탐지를 해결하고자 하였다. SVM은 학습과정에서 오탐지를 최소화하기 위해 데이터 포인트와 결정 경계를 조정하고 최적의 결정 경계를 찾아내어 수체와 비수체를 높은 정확도로 분류하는 연구가 진행되고 있다(Mountrakis et al., 2011). Sentinel-1 SAR 영상을 기반으로 인더스강 하류 지역에서 Otsu 기법 및 SVM 기법을 활용하여 침수 지역 탐지 및 활용성을 평가하였다. 이를 통해 침수 전, 침수 발생, 침수 후 등 각 모델의 수체탐지 성능을 Confusion Matrix를 통해 비교하고 오탐지 및 미탐지를 통해 각 기법의 특징을 파악하였다.
2. 연구지역 및 데이터
2.1 연구지역
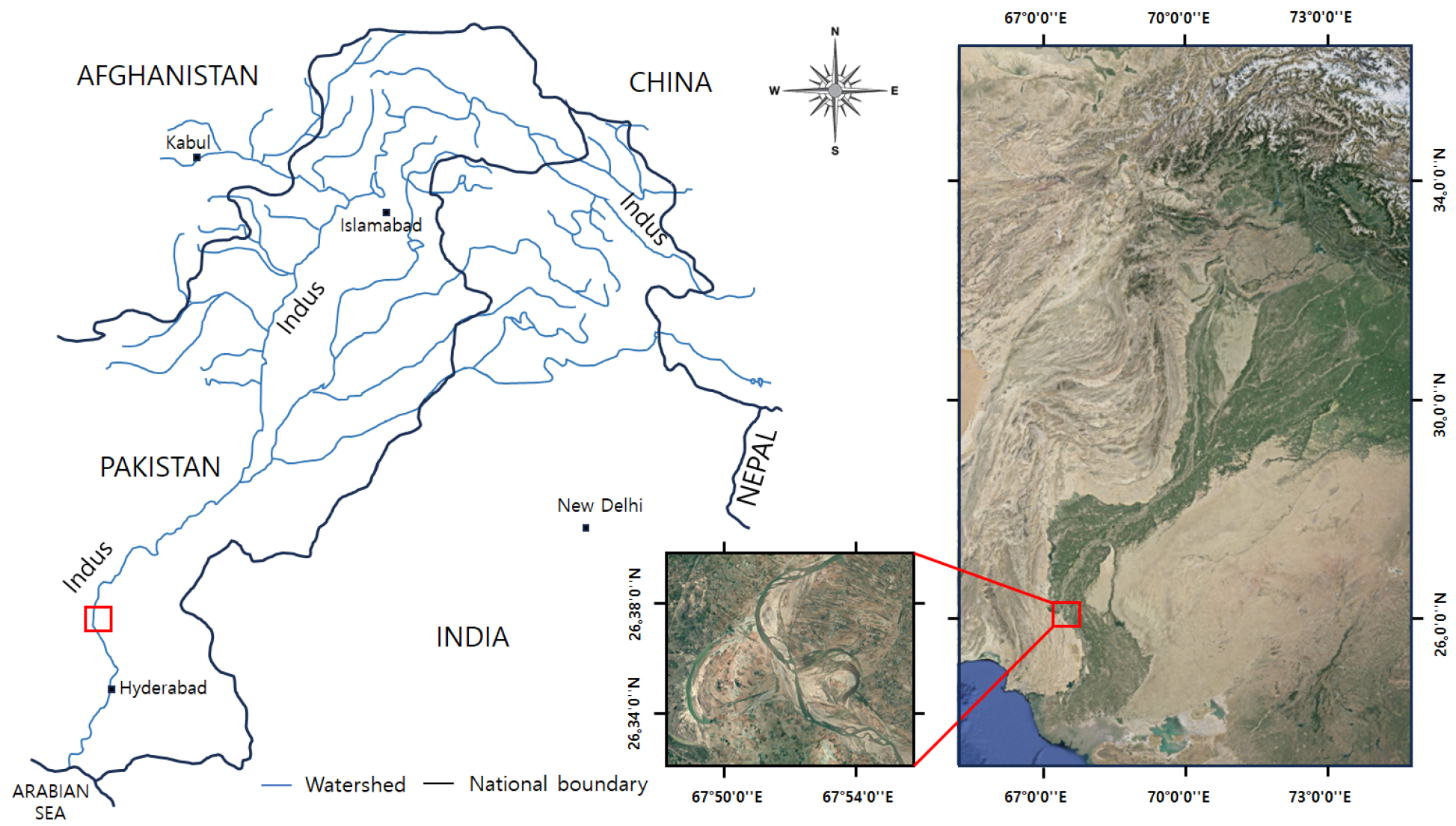
본 연구에서는 67°58′28′′E, 26°34′31′′N에 위치한 파키스탄 인더스강 하류 지역을 대상으로 수체 및 침수 탐지 연구를 수행하였다. 인더스강 유역은 Fig. 1와 같이 상류부터 하류까지 고도차이가 3,600 m 이상에 이르는 급격한 유역 경사를 갖고 있으며, 히말라야 산맥부터 시작하여 하류까지 총 길이는 2,900 km ~ 3,200 km 이다. 특히, 하류 지역은 폭우에 의한 침수와 상류지역의 겨울철 얼어있던 눈이 여름철에 녹아내려 발생하는 급격한 유량증가로 인한 침수가 발생하는 지역으로, 잦은 침수피해가 발생하고 있다. 본 연구기간 내에 발생한 침수 피해는 한달 가까이 지속되었으며, 단기간에 침수 현상이 사라지는 국내의 조건에 비해 수체 및 침수 탐지에 적합함을 보여주고 있다.
2.2 데이터
본 연구에서는 Google Earth Engine을 활용하여 Sentienl-1 SAR 및 Sentinel-2 MSI 위성 데이터를 확보하였다. 위성영상 데이터 기간은 2020년 1월 1일부터 2022년 10월 17일까지이며, 이 기간 동안 Sentinel-1 SAR 자료를 수체 및 침수 탐지 목적으로 활용하였다.
2.2.1 Sentinel-1 SAR
Sentinel-1 SAR 위성은 C-band (5.405 GHz) 마이크로파 레이더 센서를 기반으로 진폭 정보 및 위상 정보를 수집한다(Huang et al., 2018). 진폭 정보만을 포함한 Ground Range Detected (GRD) 자료는 SM (Strip Map), IW (Interferometric Wide swath), EW (Extra Wide swath)로 구성되며, 그 중 IW 모드는 고해상도 SAR 데이터를 제공하면서 넓은 지역을 분석할 수 있다(Bioresita et al., 2018; Wang et al., 2019). IW 영상모드는 VV, VH 편파를 지원함으로써 지형 및 표면 특성을 활용하여 분석하는데 적합하다. 편파조합은 레이더 송수신 각도에 따라 VV (Vertical Transmit-Vertical Receive), VH (Vertical Transmit-Horizontal Receive), HH (Horizontal Transmit-Horizontal Receive), HV (Horizontal Transmit- Vertical Receive)와 같이 다양한 편파로 구성되며, 단일 또는 다중 편파(VV, VV+VH)로도 구성할 수 있다(Chung et al., 2021). VH 및 HV와 다르게 VV 편파와 HH편파는 수체에서 민감하게 반응하여 수체 및 침수탐지에 적합하다(Bourgeau-Chavez et al., 2001). 인더스강 지역은 VV 편파와 VH 편파만 사용이 가능하여 수체에 민감한 VV 편파를 활용하였다(Pham-Duc et al., 2017). 본 연구에서는 VV 편파를 활용하여 전천후 조건에서 수체 및 침수 탐지를 진행하였다.
2.2.2. Sentinel-2 MSI
Sentinel-2는 Sentinel-2A와 Sentienl-2B를 함께 활용하여 5일의 시간해상도를 가지며, 13개의 다중밴드를 보유하고 있다(Yang et al., 2018). 밴드의 종류는 가시광선, 근적외선, 단파 적외선 등 다양하며, 밴드들의 공간해상도는 10 m ~ 60 m로 빨강(R), 초록(G), 파랑(B), 근적외선(NIR)은 10 m 공간해상도를 제공한다(Qing et al., 2021).
3. 방법론
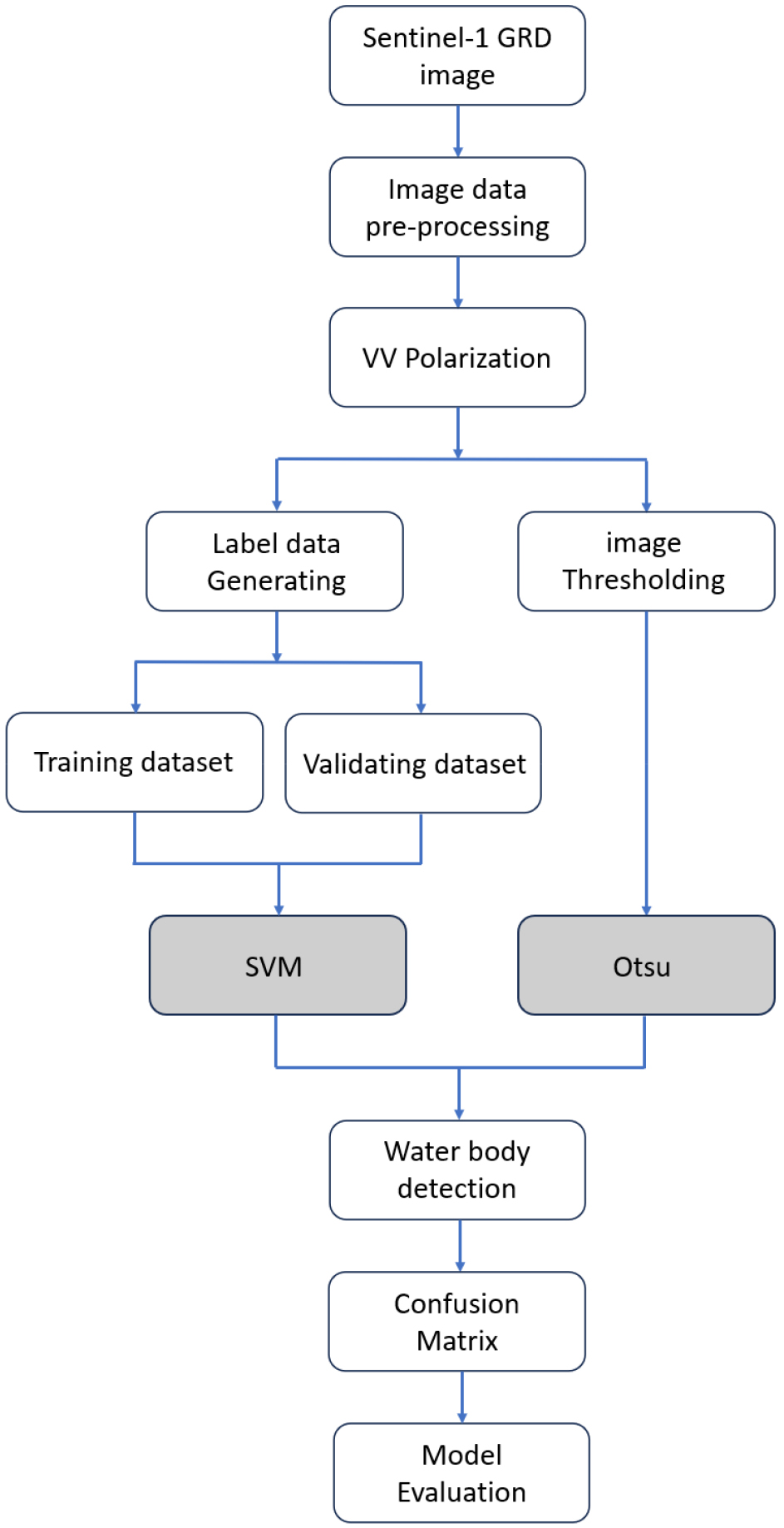
본 연구에서는 Otsu와 SVM을 적용하여 수체탐지를 수행하였으며 전체적인 방법론의 흐름도는 Fig. 2에 도시되었다. 위성영상 이미지 데이터는 노이즈의 영향을 받아 데이터의 품질이 저하되는 현상이 발생하고 있다(Rana and Suryanarayana, 2019). 노이즈 현상은 기법의 정확도에 부정적인 영향을 미치며, 이를 처리하기 위한 전처리 과정이 요구된다. 데이터 전처리 과정에는 Speckle filtering의 일종인 Median 필터를 사용하였으며, 이 필터는 가장자리 및 선형 특징과 같은 세부 사항을 제거하지 않으면서 speckle 노이즈를 감소시킨다(Qiu et al., 2004; Kim et al., 2022). 데이터 전처리 과정은 정보를 명확하게 표현함으로써 모델의 정확성을 향상시키는 필수적인 과정이다. 전처리된 영상 데이터 결과를 활용하여 0과 1로 분류되어 수체와 비수체를 구분하는 Label 데이터를 생성하였다. Label 데이터는 SVM (Support Vector Machine) 기법에서 정답 데이터로 활용되어 데이터의 학습을 수행하였다. 학습된 데이터를 활용하여 SVM 예측을 수행하였으며, 예측된 데이터를 바탕으로 모델의 성능을 평가하였다. 평가 지표로는 Confusion Matrix를 사용하여 모델의 성능을 정량적으로 측정하였고 수체, 비수체, 오탐지, 미탐지 4개의 구역으로 분류하였다. 수체 비수체를 제외한 오분류는 특성에 맞게 구분되었다. 이에 따라 비수체이나 수체로 탐지한 경우 오탐지로 정의하였고 수체이나 비수체로 탐지한 경우 미탐지로 정의하였다. 예측 데이터 평가를 통해 수체 및 침수지역을 탐지하였으며, 모델의 특성 및 정확도를 파악할 수 있었다. Otsu 기법은 SVM 기법과 다르게 별도의 학습데이터를 필요로하지 않는 알고리즘 형식으로 수체와 비수체를 임계값을 통해 분류하여 간단하고 효율적인 기법으로 평가 받고 있다. 서로 다른 두 모델의 기법을 비교하고 수체 및 침수탐지의 예측 결과 데이터를 통해 모델의 정확도와 특성을 판단하였다.
3.1 Otsu 기법
Otsu 기법은 히스토그램 분산특성에 따라 두 개의 클래스로 나눈 후, 이 두 클래스 간의 분산 차이를 최대화할 수 있는 최적의 임계값 T (Threshold)를 자동으로 결정하는 기법이다(Li and Kim, 2006). Otsu 기법은 수체변화 탐지에서 가장 간단하고 효율적인 기법으로 복잡한 수변 지역의 수체탐지에서 그 활용성을 입증하였다(Tran et al., 2022). 본 연구에서는 전처리된 Sentinel-1 VV 후방산란계수 히스토그램을 기반으로 수체 및 비수체 클래스의 가중된 분산의 합으로 정의된 클래스 내 분산을 최소화하는 값을 도출하였다. 수표면 T 값을 기준으로 후방산란계수 값이 작은 지역은 수체, 높은 지역은 비수체로 분류된다(Kim et al., 2022).
은 수체와 비수체 클래스 분산의 가중 합이고, t는 임계값이다. 와 는 임계값으로 구분된 두 클래스의 확률이고 와 는 두 클래스의 분산이다. , 는 수체의 확률 과 분산이고 , 는 비수체의 확률과 분산이다(Tran et al., 2022; Otsu et al., 1979). 이와 같이 Otsu 기법은 Eq. (2)에 주어진 이진분류 작업으로 Eq. (3)에서 분산의 차이가 최대가 되는 최적의 임계값 T를 구할 수 있다.
3.2. SVM 기법
SVM 기법은 마진이 최대화된 결정 경계를 찾는 것을 목표로 하는 머신러닝 방법으로, 학습데이터 훈련을 통해 오분류를 최소화하고 최적의 결정경계를 찾아내어 높은 정확도로 데이터를 분류할 수 있다(Sharifzadeh et al., 2020). 기존 결정경계 식별방법은 데이터 분포에 대한 특정한 가정을 통해 이루어지는 반면에, 비모수적 방법인 SVM 기법은 데이터에 대한 가정 없이도 결정 경계에 가장 가까이 위치한 포인트에 더 많은 가중치를 할당하고, 멀리 있는 데이터 요소에 더 적은 가중치를 할당된다. 가중치가 할당된 정보들을 기반으로 결정경계가 식별된다. 이러한 이유로 노이즈가 많은 SAR 데이터에서 가정을 통해 이루어지는 기존 방법은 적용성을 벗어나지만 SVM 기법은 노이즈가 많은 데이터에서도 결정 경계를 생성할 수 있다. 따라서, 비모수적 방법 중 하나인 SVM 기법은 데이터의 분포에 대한 가정이 적기 때문에 노이즈와 같은 이상치에 덜 민감하고 데이터의 복잡한 패턴을 분류하는데 뛰어난 성능을 보여주고 있다. 이는 종종 노이즈가 많은 SAR 데이터에 활용할 수 있으며, SVM과 같은 비모수적 방법에서 효과적이다(Possa and Maillard, 2018). 본 연구에서 적용한 SVM 기법은 선형커널 기법이 적용되어 별도의 Hyperparameter setting은 이루어지지 않았으며, Loss function은 classification error을 적용하여 SVM 머신러닝을 구동하였다. reference는 레이블 데이터를 활용하였고 학습데이터를 통해 예측한 결과를 predictor로 지정하였다. 또한, Linear kernel features를 활용하여 데이터 포인트들의 결정경계를 생성하고, 복잡한 유역에서 발생하는 비선형 문제에 적용하여 데이터 특성에 따라 수체 및 비수체를 분류하였다(Eq. (4)).
3.3 Confusion Matrix
Confusion Matrix 기반으로 한 수체 탐지 결과의 정량적 정확도 평가에서 오탐지와 미탐지 정도를 파악하기 위해 정밀도(Precision; Eq. (5))와 재현율(Recall; Eq. (6))이 활용되었다. 이외에도 모델의 성능을 측정하기 위해 Intersection over Union (IOU; Eq. (8))이 사용되었다. Confusion Matrix 지표는 0부터 1까지 정의되며, 1에 가까울수록 모델의 성능이 우수함을 나타낸다(Table 1). 따라서, 본 연구에서는 정밀도 및 재현율을 통해 모델의 특성을 확인하였으며, Confusion Matrix 평가 지표를 통해 Otsu 기법과 SVM 기법의 수체 및 침수탐지 성능을 정량적으로 비교 분석하였다.
Table 1.
Confusion matrix
| Estimated | |||
|
Positive (Water) | Negative (Non-Water) | ||
| True |
Positive (Water) |
TP (Water body) |
FN (Undetected) |
|
Negative (Non-Water) | FP (Misclassification) |
TN (Non-Water body) | |
3.4 Receiver Operating Characteristic Curve
ROC (Receiver Operating Characteristic) 곡선은 모델의 민감도(Sensitivity) 및 특이도(Specificity)를 기반으로 FPR (False Positive Rate; Eq. (9)) 및 TPR (True Positive Rate; Eq. (10))을 추출하여 AUC (Area Under the Curve) 면적을 나타냈다. AUC는 ROC 곡선 아래의 면적을 나타내는 값으로 모델의 성능을 분류할 수 있는 평가지표로 활용되고 있다(Table 2). 본 연구에서는 AUC 평가 지표에 따라 Otsu 기법과 SVM 기법의 수체 및 침수탐지의 결과를 평가하고 비교 분석하였다.
4. 연구 결과 및 토의
4.1 Otsu 기법 및 SVM 영상 정확도 비교 분류
Figs. 3(a)~3(c)는 홍수 전, 홍수 시, 그리고 홍수 후 사상에 대한 Label 데이터를 보여주고 있다. Label 데이터는 예측한 데이터를 평가하기 위한 정답 데이터로서 0과 1로 분류된다. Figs. 4(a)~4(f)는 정답 데이터와 예측 데이터를 비교하고 Confusion Matrix를 통해 수체, 비수체, 오탐지, 미탐지 4개의 지역으로 분류지정하여 나타냈다. Fig. 4는 Otsu 기법과 SVM 기법의 예측 결과를 바탕으로 4개의 지점을 분류하고 시각화한 자료로 침수 전, 침수 발생, 침수 후로 나타냈다. Table 2는 인더스강 하류 부근에서 발생한 침수 피해를 Accuracy, Precision, Recall, IOU 등을 통해 Confusion Matrix로 나타냈다. Figs. 4(a)~4(c)는 SVM 기법의 분류 조건을 침수 전후에 따라 나타내고, Figs. 4(d)~4(f)는 Otsu 기법의 분류 조건을 나타낸다. Fig. 4(a) 와 다르게 (d)에서는 오탐지 현상이 높게 나타났으며, 두 클래스의 경계부분에서 오탐지의 비율이 높게 나타나는 것을 선행연구에서 확인할 수 있었다(Yuan et al., 2020). Fig. 4(d)에서 오탐지 현상은 진흙과 퇴적물의 혼합에 의해 발생한 것으로 을 관련 선행연구에서 확인할 수 있었다(Jiang et al., 2014). 반면, Fig. 4(a)의 결과를 살펴보면 SVM 기법은 오탐지가 적게 나타나는 것을 확인할 수 있다. Otsu 기법이 SVM 기법에 비해 정확도 부분에서 0.15 낮게 나타났으며, 정밀도는 SVM 기법보다 0.22 낮은 0.18로 낮은 결과가 나타났다(Table 3). 이에 따라 Otsu 기법의 오탐지율이 높은 것을 확인할 수 있었다. Figs. 4(b) and 4(e)는 침수 상황을 보이고 있으며, 홍수로 인한 침수 시에는 Otsu 기법과 SVM 기법의 정확도 차이가 크지 않음을 보여주고 있다. 침수 탐지는 Otsu 기법이 SVM 기법보다 정확도가 0.03 높게 나타났으며, 정밀도는 0.99로 SVM 기법과 동일한 정밀도를 보였다. Figs. 4(c) and 4(f)는 침수 이후에 복구된 유역을 보여주고 있으며, SVM 기법이 Otsu 기법에 비해 낮은 오탐지율로 인해 정확도가 0.06 차이나는 것을 확인할 수 있다. 일반적으로 SVM 기법이 Otsu 기법보다 높은 정확도를 유지하고 있는 것을 확인할 수 있으며, 정밀도는 0.40 (a), 0.99 (b) 0.98 (c)로 동일하거나 높은 결과가 나타났다(Table 3). Otsu 기법은 SVM 기법보다 재현율이 전체적으로 높거나 동일하며, 이는 미분류 영역이 적게 발생함을 확인할 수 있다. 침수 조건에서 Otsu 기법의 정확도가 SVM 기법보다 0.03 높게 나타났으며, 정밀도는 0.99로 동일하게 나타났다. 결과적으로 SVM 기법이 Otsu 기법보다 침수 전, 침수 후 조건에서 높은 정밀도와 정확도를 나타냈으며, 침수 조건에서는 Otsu 기법이 SVM 기법보다 정확도, 정밀도, 재현율이 전체적으로 높거나 동일하게 나타났다. 그러나, 침수조건에서 Otsu 기법이 SVM 기법보다 5% 미만의 범위에서 좋은 정확도를 보이며, 그 외 조건에서는 SVM 기법이 Otsu 기법보다 5% 이상의 범위에서 좋은 정확도를 보이고 있다.
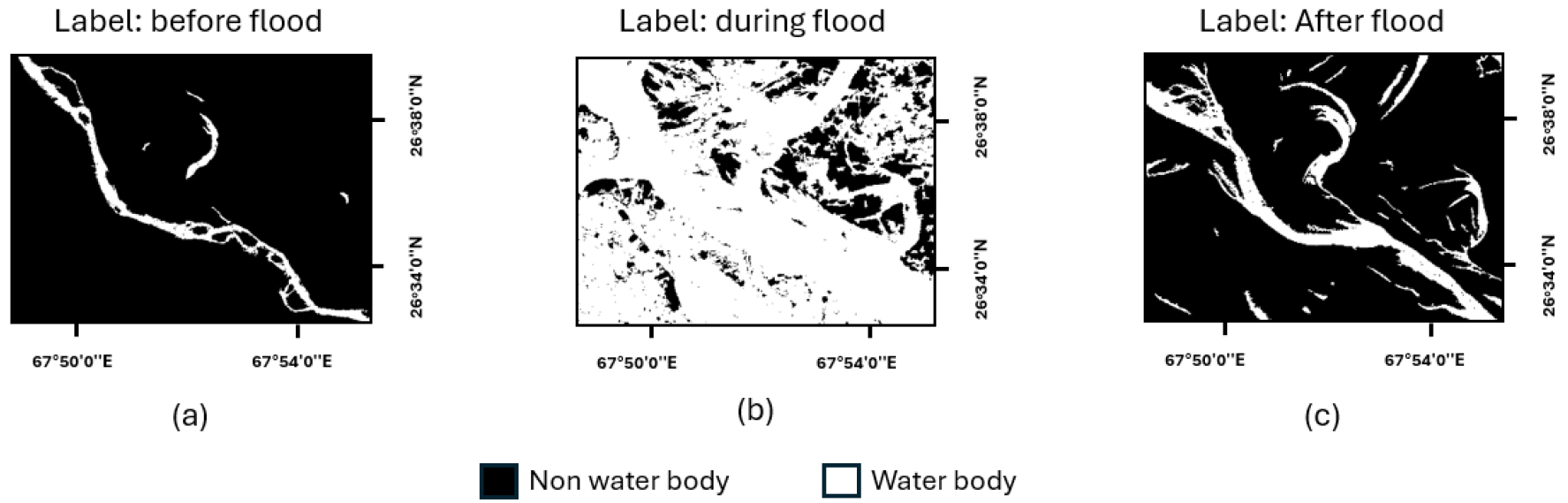
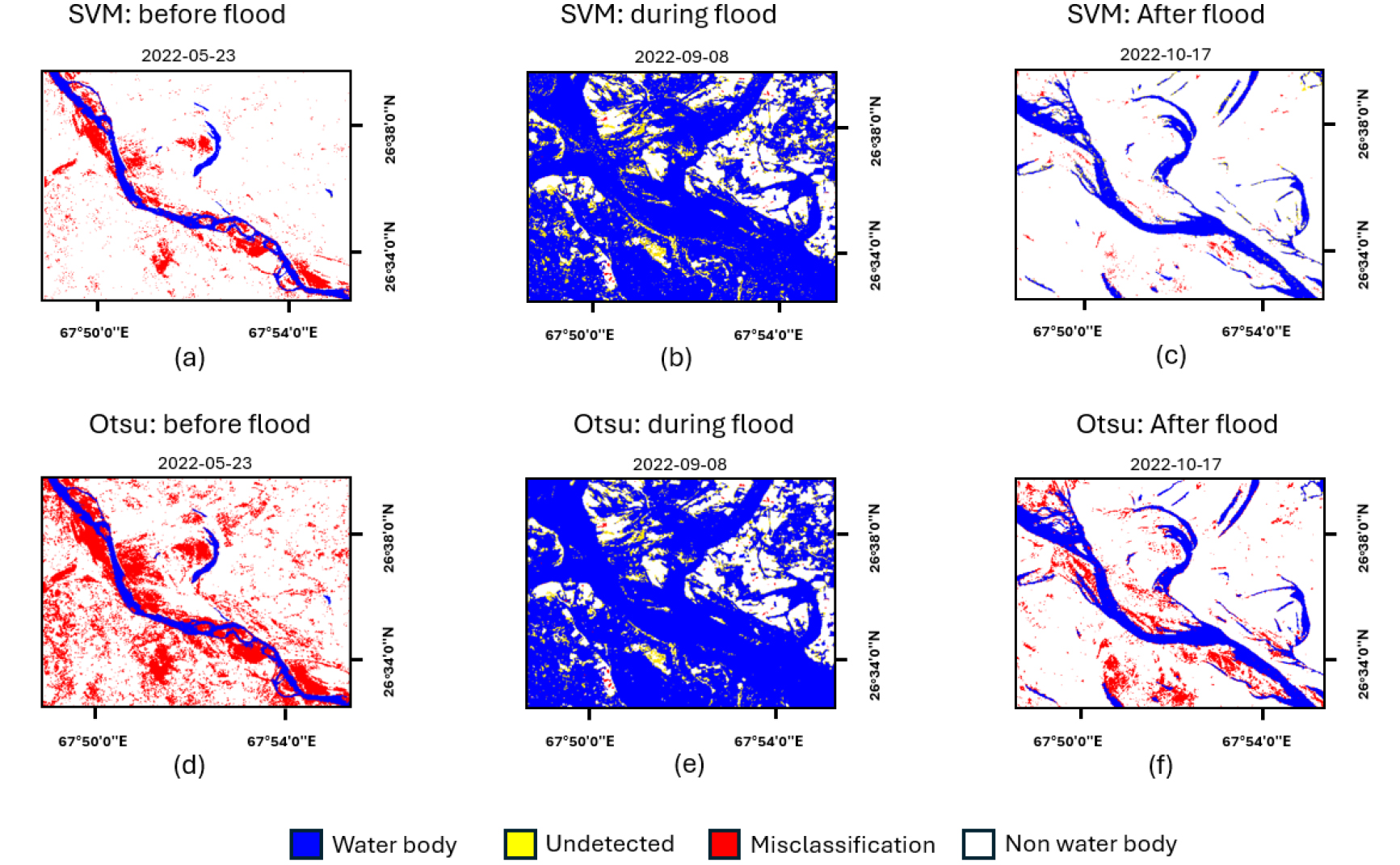
Table 3.
Confusion Matrix for Water body detection shown
또한, 본 연구에서 Sentinel-1 검증자료로서 사용하고 있는 NDWI는 Label 데이터와 비교하였을 때 Fig. 5 도시된 바와 같이 상당히 유사한 경향을 제시하고 있어 검증자료로서 적합함을 보여주고 있다. Table 3는 이러한 NDWI를 기반으로 두 기법의 정확도를 비교한 것으로 SVM 기법이 Otsu 기법보다 더 높은 정확도의 일치성을 제시하는 것을 확인할 수 있었다. Table 4는 모델의 성능을 판단하는 수치로 활용되고 있는 AUC 면적(ROC 곡선의 면적) 값을 나타낸 것이다. 침수 전에는 SVM 기법이 Otsu 기법보다 높은 AUC 값을 보이고 있으며 침수 발생시에는 Otsu 기법이 소폭 높은 값의 결과를 보이고 있다. 이는 기존의 정확도 및 검증자료에서도 동일한 양상을 띄고 있었으며, 침수조건에서는 Otsu 기법이 SVM 기법보다 0.01 정도 높은 결과가 얻어졌다. 두 기법 모두 정확도, 검증자료 및 AUC에서 비슷한 결과를 나타내고 있으나 수체 및 침수탐지 기법에서는 수치상으로 SVM 기법이 높은 정확도와 일치성을 보이고 있다.
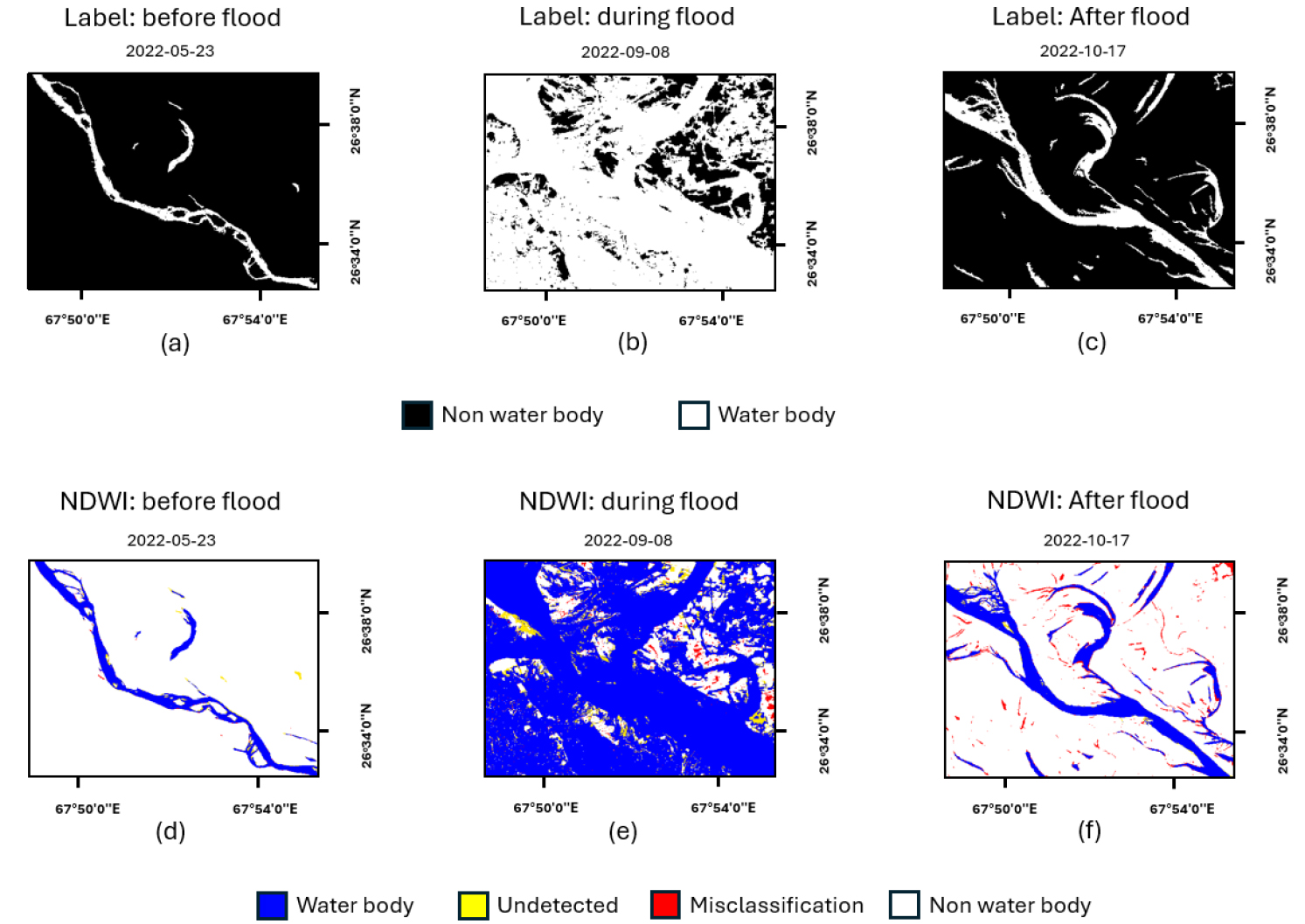
Table 4.
Area results according to flood state under the ROC curve (AUC)
| State | Otsu | SVM |
| Pre-flood | 0.80 | 0.87 |
| Flood | 0.95 | 0.94 |
| Post-flood | 0.94 | 0.94 |
4.2 위성영상을 활용한 침수 전후 수체변화 분석
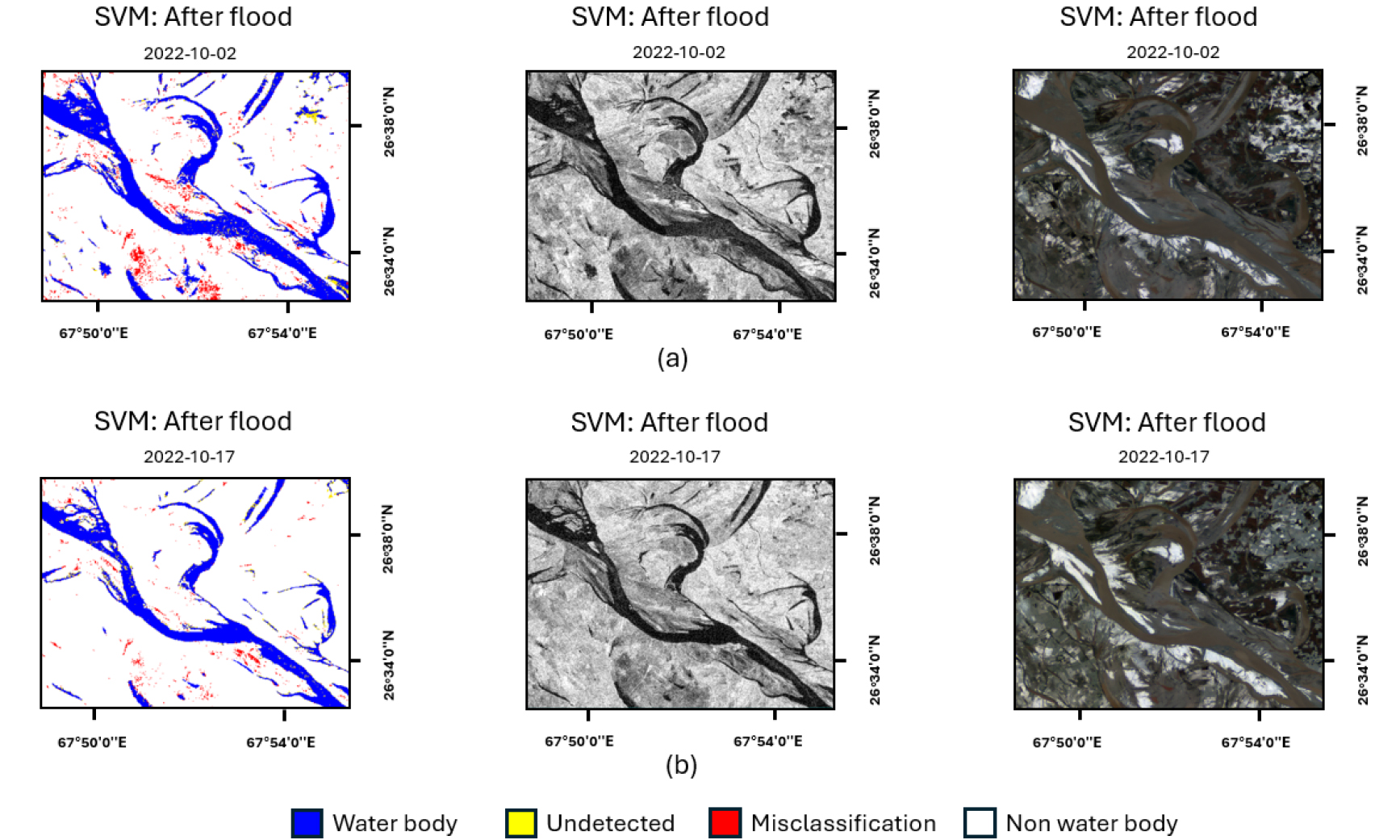
Figs. 6(a) and 6(b)는 침수 이전의 하천 모습을 보여주며, Confusion Matrix를 통해 유역 주변에서 발생하는 오분류 구역을 확인할 수 있다. 진흙과 퇴적물의 혼합물 반사는 SVM 기법의 정확도에 영향을 주지만, Table 5에서와 같이 90% 이상의 정확도를 유지하는 것을 확인할 수 있다. 이는 SVM 기법이 학습과정에서 오분류를 최소화하고 최적의 결정경계를 찾는 데 있어 높은 정확도를 얻는 특성을 나타낸 것이다. 이에 따라, SVM 기법은 혼합물에 의한 영향이 적은 것을 확인할 수 있다. Figs. 7(a) and 7(b)는 홍수로 인한 수위 상승으로 하천 주변 지역까지 침수된 상태를 나타내며, 과거 유역의 형태를 찾을 수 없어 침수의 심각성을 파악할 수 있다. Fig. 7(a)에서는 퇴적물이 침수되어 수표면의 흐름을 따라 이동하고 있으며, 유역의 굴곡 부분에서 정체되어 수표면의 퇴적물이 비수체로 감지되는 현상이 발생하는 것을 확인할 수 있다(Namikawa et al., 2016; Shen et al., 2022). 침수로 인한 수체면적의 변화는 Confusion Matrix를 통해 나타냈으며, 침수 전 미탐지 픽셀 개수는 318 ~ 5,509 에 비해 침수 발생시 시간에 따라 미탐지 픽셀 수가 106,116 ~ 216,475 증가했음을 확인할 수 있다(Table 6). 이는 혼합물이 수표면에 부유하고 이동했음을 확인할 수 있으며, 침수 후 혼합물이 유실되어 오탐지 픽셀이 시간에 따라 감소함을 확인할 수 있다. 이를 통해 침수 전 유역의 수체 면적과 침수 발생시 수체 면적을 수치적으로 정확하게 분석할 수 있다. Figs. 6(a) and 6(b)는 침수 전 오탐지 및 미탐지의 수치적 변화를 비교하면 퇴적물에 의해 오탐지 비율이 높게 나타나고 미탐지는 낮게 나타나는 경향을 보여주고 있다. Figs. 7(a) and 7(b)는 침수 발생시 퇴적물이 모두 침식되어 오탐지의 영향이 줄어들었음을 확인할 수 있다. Figs. 8(a) and 8(b)는 침수 이후 어느 정도의 시간이 지난 상태를 보여주며, 이전의 재난으로 인한 피해의 흔적과 일부 복구된 과정을 확인할 수 있다. 침수 이후에는 퇴적물이 대부분 유실되어 오탐지의 영향이 크게 줄어들었음을 확인할 수 있다. 결과적으로, 지속적인 모니터링이 가능한 Sentinel-1 위성 데이터와 오분류를 최소화하는 SVM 기법을 활용하여 수체 및 침수변화 탐지를 높은 정확도로 분석하였다.
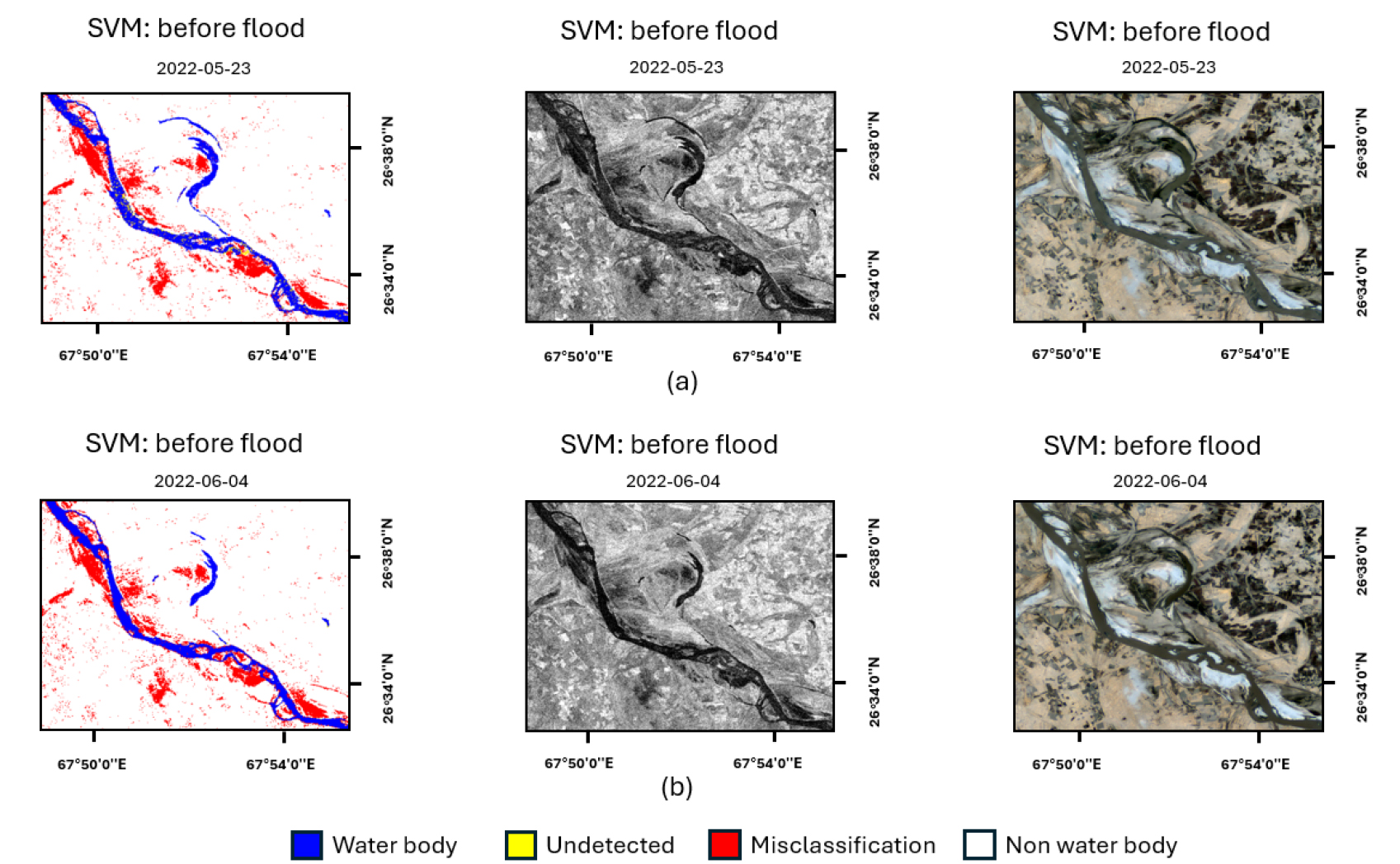
Table 5.
Model accuracy according to flood state
| Flood state | Date | Accuracy |
| Pre-flood | 2022-05-23 | 0.92 |
| 2022-06-04 | 0.93 | |
| Flood | 2022-09-08 | 0.90 |
| 2022-09-11 | 0.81 | |
| Post-flood | 2022-10-02 | 0.96 |
| 2022-10-17 | 0.98 |
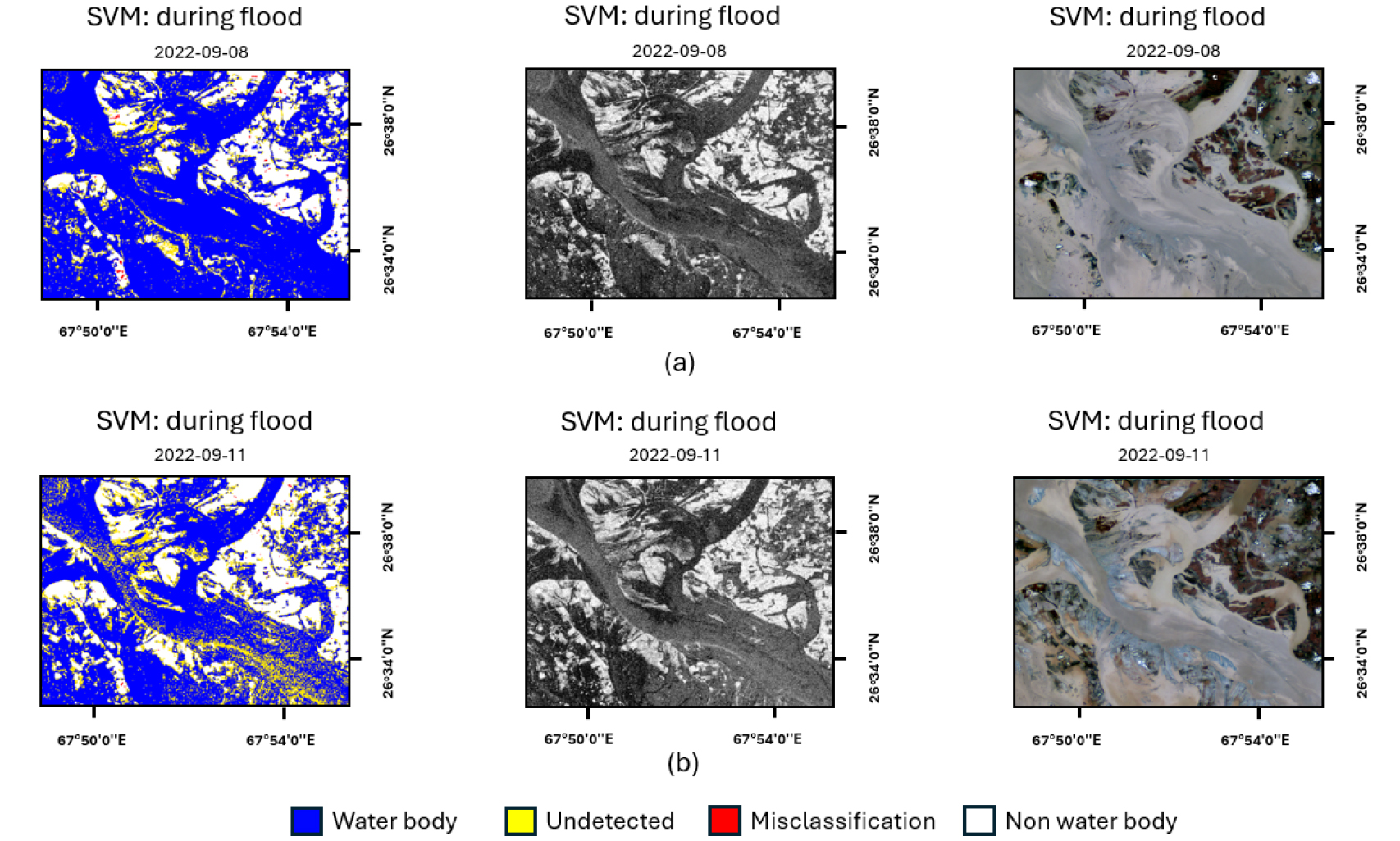
Table 6.
Pixel changes in the confusion matrix
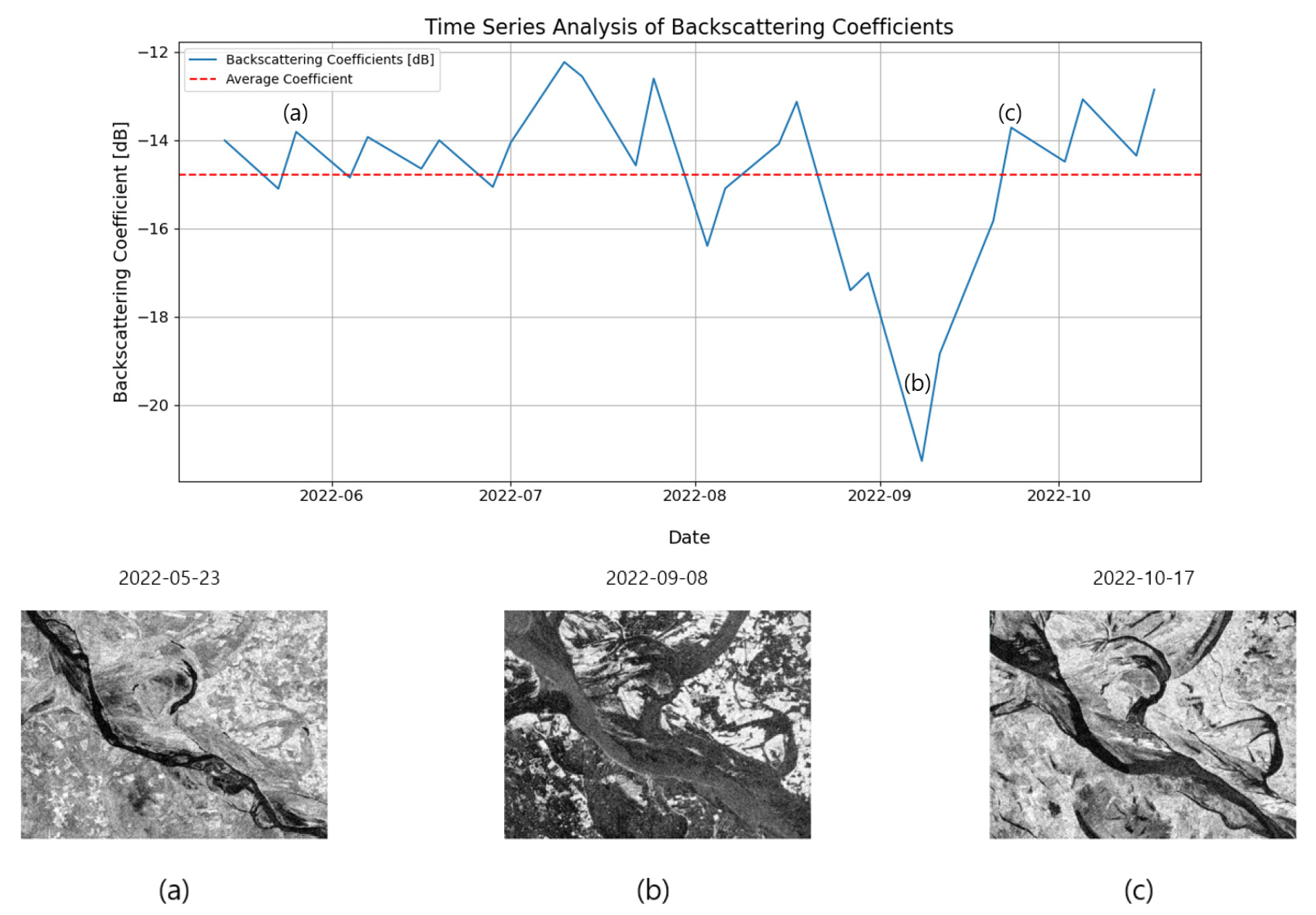
Sentinel-1 위성 이미지 데이터를 사용하면 후방산란계수 값을 적용하여 수체 및 비수체 영역을 분류할 수 있으며, 평균후방산란계수 -15 dB 기준으로 침수 전후 및 침수가 발생한 시기를 판단하였다. Fig. 9(a)는 홍수 전 단계를 나타내며, 후방산란계수 값이 -15 dB에서 -14 dB로 일관된 범주를 보이고 있다. 반면, Fig. 9(b)는 -20 dB까지 수치가 하락하는 특성을 통하여 해당 시기에 홍수가 발생하였음을 확인할 수 있었다. 이후 침수 된 지역이 회복되어가며, 평균후방산란계수 값도 침수 전과 동일하게 복구되는 모습을 시계열 분석을 통해 파악하였다. 특히, 2022년 10월에 관측된 평균후방산란계수 값은 -14 dB에서 일관된 모습을 보였다. 홍수 전과 유사한 평균후방산란계수 값으로 복귀됨에 따라 홍수가 종료되었다는 결론을 도출할 수 있었다. 즉, 평균후방산란계수에 대한 이러한 시계열 분석은 홍수전, 홍수 발생 및 홍수 종료 시기를 적절히 분류하는데 적합함을 확인할 수 있었다.
4.3 침수 피해 지역 파악 및 분석
침수로 인한 피해규모 파악은 재난 상황 관리에 있어 매우 중요한 요소이다. 정확한 침수 피해 규모를 파악함으로써, 재난 관리 및 대응 작업을 효과적으로 수행할 수 있어 피해를 최소화할 수 있다. 침수 지역을 파악하기 위해서는 침수 이전 이미지를 확보하는 것이 중요하며, 침수 피해 발생시 이미지 비교를 통해 침수 지역을 파악할 수 있다. 따라서, 본 연구에서는 침수 전과 침수 시점의 이미지를 비교하여 피해 지역을 파악하고 Otsu 기법과 SVM 기법의 침수 탐지 적합성을 평가하고자 하였다. 침수 피해 지역을 탐지하기 위해 침수 지역과 비침수 지역으로 분류하였으며, 각 기법의 침수 탐지 적합성을 판별하기 위해 Label을 기준으로 비교하였다. Fig. 10는 Otsu 기법과 SVM 기법이 침수 지역 및 비침수 지역으로 분류된 모습을 보이고 있으며, SVM 기법이 Label과 유사한 모습을 확인할 수 있었다. 또한, Table 7는 정량적인 평가를 위해 침수 지역과 비침수 지역의 픽셀 정보를 나타냈으며, SVM 기법이 정량적 평가에서 Label과 유사함을 확인할 수 있었다. 반면, Otsu 기법은 SVM 기법에 비해 침수 지역 탐지가 다소 누락되었으며, Label과 비교했을 때 크게 차이나는 것을 확인할 수 있었다(Table 7). 이는 침수 이전 Otsu 기법에서 발생한 오탐지(Fig. 4(d))가 침수 피해 지역을 파악하는데 악영향을 미치고 있으며, 침수 지역에 대한 정확한 파악 및 분석이 어려움을 확인할 수 있었다. 이를 통해 SVM 기법이 침수 피해 지역을 파악하는 데에 있어서 Otsu 기법보다 적합함을 확인할 수 있었다. 특히, SVM 기법이 Label과 상당히 유사하다는 것을 고려했을 때, 침수 피해 지역을 식별하는데 효과적일 것으로 판단된다.
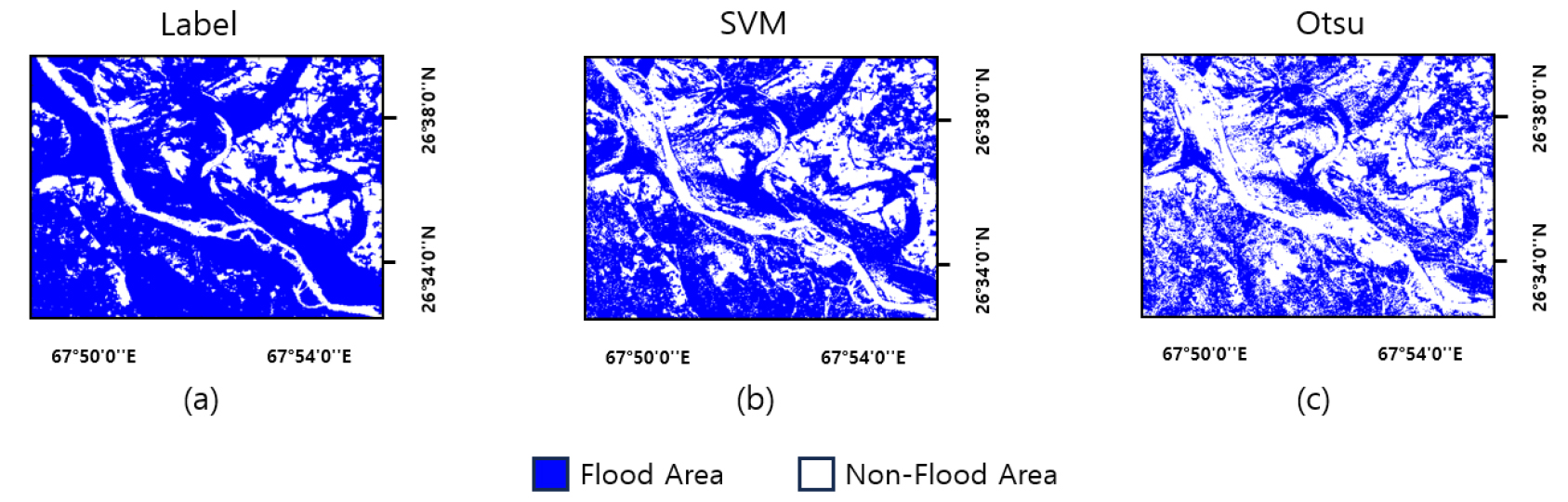
Table 7.
Pixel changes in the confusion matrix of Fig. 10
| Model | Flood area | Non-Flood area |
| Label | 854,092 | 279,348 |
| Otsu | 512,696 | 620,744 |
| SVM | 670,096 | 462,479 |
5. 결 론
본 연구에서는 히말라야 산맥의 영향으로 침수 피해가 빈번한 파키스탄 인더스강에 위치한 하류 유역에 대한 수체와 비수체를 구별하기 위한 대표적 방법인 Otsu 기법과 SVM 기법을 적용하였다. Otsu 기법은 히스토그램을 분산에 따라 두 개의 클래스로 나누는 방법이며, SVM 기법은 마진이 최대화된 결정 경계를 찾는 것을 목표로 학습데이터를 사용하는 머신러닝 방법이다. 위성영상은Sentinel-1을 적용하였으며 침수 전과 침수 시 그리고 침수 후의 수체 영역의 특성을 분석하였다. 각 방법에 의한 오탐지 및 미탐지 특성은 시각화한 Confusion Matrix를 통하여 비교하였으며 또한 Accuracy, Precision, Recall, IOU 등을 활용하여 비교 분석하였다.
인더스강 하류 유역에 대한 침수 전과 후에 대한 위성 영상 분석 결과, 학습을 통해 수체와 비수체를 분류하는 SVM 기법이 Otsu 기법보다 여러 환경에서 상대적으로 높은 정확도를 보여주고 있다. 그러나 홍수로 인한 침수 시에는 Otsu 기법에 의한 오탐지 현상이 감소하여 SVM 기법과 비교하여 정확도 차이가 크지 않음을 보여주고 있었다.
이와 같이 SVM 기법을 사용하는 것이 평상 시와 홍수 시 모두 침수 탐지에 유리한 방법인 것으로 확인되었으므로, 이의 활용을 위해서는 머신러닝 적용을 위한 적절한 학습데이터의 마련이 필요하다.
