

1. 서 론
2. 연구방법
2.1 연구대상지
2.2 무인선의 제원
2.3 분석방법
3. 연구 결과
3.1 유인선과 무인선의 측정데이터와 측정시간의 비교
3.2 공간보간 비교를 통한 무인선의 모니터링 적용성 평가
3.3 공간보간 신뢰성 검증
4. 결 론
1. 서 론
하천과 호소를 비롯한 다양한 내륙 수체는 기후, 유역 개발, 댐·보 등 수리구조물의 운영에 따라 시·공간적으로 매우 복잡한 수리·수질 특성을 나타낸다. 수온, 용존산소, 전기전도도, 영양염류 농도, 클로로필-a와 같은 수질 인자와 함께 유속, 수심, 지형 특성은 수생태계 건강성을 판단하고 수자원 관리 정책을 수립하는 데 필수적인 기초자료이다(Choi et al., 2020). 그러나 현재 운영 중인 수질 측정망은 대부분 고정식 정점에 의존하고 있으며, 이로 인해 얻어지는 자료는 시·공간적 해상도가 제한적이다. 이러한 정점 기반 자료만으로는 수체 전역의 물리·화학적 특성과 동태적 변화를 충분히 반영하기 어렵다(Imberger and Patterson, 1990).
특히 집중호우에 따른 탁수 유입, 댐 방류 시 급격한 유속 변화, 여름철 장기 체류에 따른 성층화 심화와 같은 현상은 짧은 시간과 수심 변화에 따라 크게 달라진다(Robertson and Imberger, 1994). 이처럼 시·공간적으로 급변하는 현상을 정밀하게 규명하기 위해서는 3차원 고해상도 모니터링이 필요하다. 하지만 기존의 정점 기반 채수 조사나 고정식 센서망은 이러한 요구를 충족하기 어렵고, 현장의 인력·비용·안전 문제까지 수반된다는 점에서 한계가 뚜렷하다.
국내외에서는 녹조의 대규모 발생, 저층 용존산소 고갈, 탁수의 장기 체류, 미량오염물질의 유입 등 복합적인 수환경 문제가 빈번히 보고되고 있다(Kim et al., 2017). 이러한 현상들은 수생태계 건강성과 직결되기 때문에, 단일 항목이나 정점 관측이 아니라 다차원·다항목 데이터의 통합적 분석이 요구된다. 따라서 전통적인 채수 기반 조사법을 보완하기 위해, 첨단 센서기술과 데이터 융합 기법을 적용한 새로운 수환경 모니터링 체계가 필요하다(Lee et al., 2022). 이는 마치 인체 질병 진단이 혈액검사 중심에서 영상, 유전자 분석 기반으로 진화했듯, 수환경 문제 역시 진단 방법론의 혁신이 불가피함을 의미한다.
이러한 배경 속에서 무인 원격 이동체(Unmanned Surface Vehicle, USV)는 차세대 수환경 모니터링 수단으로 주목받고 있다. USV는 다양한 센서를 탑재해 수온, pH, 용존산소, 전기전도도, 탁도 등 물리·화학적 수질 항목을 실시간으로 연속 계측할 수 있다. 또한 자동 주행이나 원격 제어를 통해 광범위한 수역을 짧은 시간에 커버할 수 있으며, 기존 조사 방식보다 높은 공간적 해상도를 확보할 수 있다. Chen et al. (2025)은 전기 추진 기반의 자율 USV를 개발하여 pH, DO, EC 등을 자동 측정할 수 있는 시스템을 구축하고, 원격 운용과 계측 안정성을 실험적으로 검증하였다. 마찬가지로 AquaDrone 연구에서는 IoT 기술과 결합한 USV 플랫폼을 활용하여 실시간 수질 감시가 가능함을 보여주었으며, 이는 기존 현장 조사 방식의 시간·비용 한계를 극복할 수 있는 대안임을 제시하였다(Qadir et al., 2024).
또한 USV 기반 모니터링은 안전성 측면에서도 큰 장점을 지닌다. 기존 필드 조사는 다수의 인력이 수상에 직접 투입되어야 하고, 특히 유속이 빠르거나 기상 조건이 불안정한 상황에서는 안전사고 위험이 커진다. 최근 「중대재해처벌법」 시행으로 인해 현장 조사자의 안전 확보가 더욱 강조되고 있는 상황에서, 무인 플랫폼의 활용은 인명 노출을 최소화하면서도 효율적인 자료 확보를 가능하게 한다(Jones et al., 2020). 이와 같이 USV는 수환경 관리의 효율성과 안전성을 동시에 달성할 수 있는 실질적 대안으로서 연구·정책 현장에서의 수요가 높아지고 있다.
본 연구는 무인선을 활용한 수환경 모니터링의 적용성을 종합적으로 검토하는 데 목적을 둔다. 이를 위해 다양한 수리·수질 센서가 탑재된 USV를 운용하여, 수심과 위치 변화에 따른 데이터를 연속적으로 수집하고, 이를 통해 녹조 발생, 탁수 확산, 저층 용존산소 고갈 등과 같은 수환경 문제의 진단 가능성을 평가한다. 나아가 USV 기반 모니터링 방식은 기존 정점 조사 방식에 비해 공간적·시간적 해상도를 크게 향상시킬 수 있으며, 연속 관측이 가능하다는 점에서 실시간 진단 능력을 제공한다. 또한 조사자가 직접 수역에 진입하지 않아도 되므로 안전성을 확보할 수 있으며, 장기간 반복 조사 시에는 인력 투입과 운용 비용을 줄일 수 있어 비용 효율성 측면에서도 이점을 가진다. 반면, 이러한 장점에도 불구하고 장비 유지관리의 부담, 고해상도 데이터의 후처리 및 관리 문제, 장기간 운용 시 배터리 지속성과 통신 안정성 확보 등의 기술적 제약이 존재한다. 따라서 본 연구에서는 USV 적용의 장점과 한계를 동시에 분석하고, 센서 제원, 플랫폼 운용 안정성, 원격 통신 및 제어 체계 등 실제 적용에 필요한 요소들을 검토하여, 수환경 모니터링 기술로서의 적용 가능성을 평가하는 것을 연구 범위로 설정하였다.
이러한 연구는 수환경 모니터링의 첨단화와 고도화를 위한 기초적 토대를 제공하며, 향후 국가 수자원 관리 및 수질 정책 수립에 있어 무인선 기술의 실무적 활용 가능성을 구체화하는 데 기여할 것으로 기대된다.
2. 연구방법
2.1 연구대상지
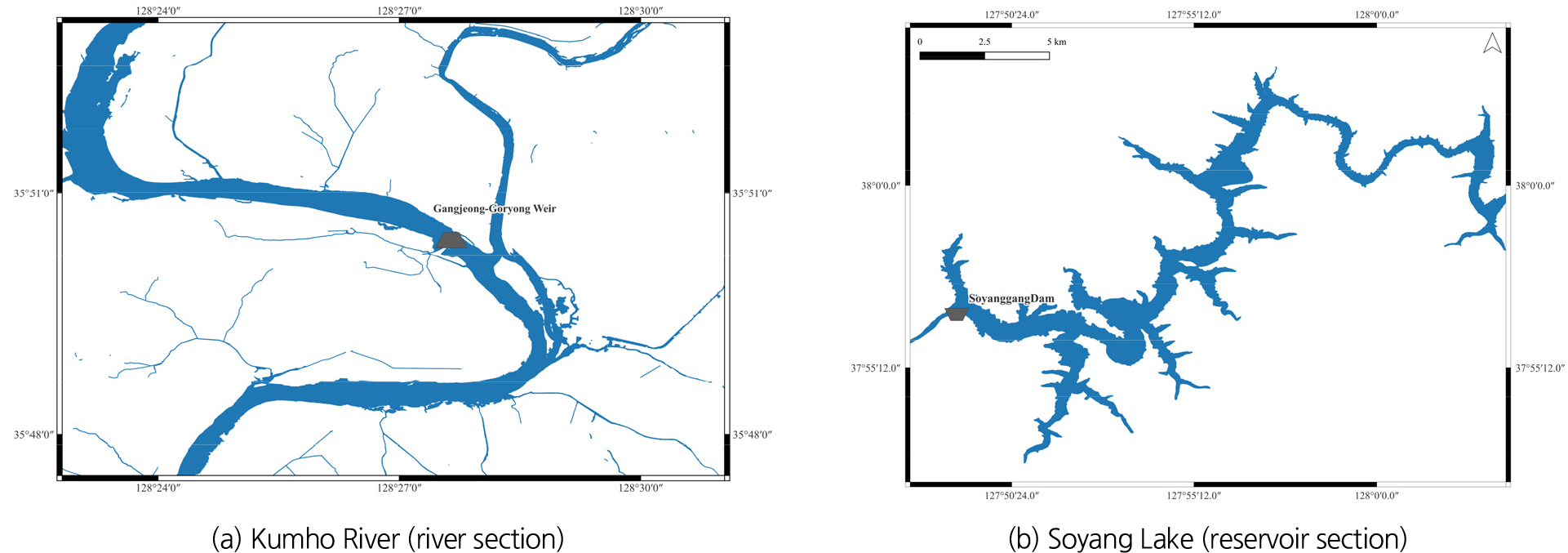
본 연구에서는 무인선을 활용한 수환경 모니터링의 적용성을 평가하기 위하여 하천과 호소를 대표하는 수체를 연구대상지로 설정하였다(Fig. 1). 하천의 경우 대구광역시를 통과하는 금호강을 선정하였다. 금호강은 도심 하천으로서 다수의 지류가 본류로 유입되는 합류부(confluence)가 형성되어 있으며, 합류 시점에서 발생하는 유속·수질 특성의 불균질성은 3차원적인 모니터링의 필요성을 강하게 시사한다. 호소의 경우 소양호를 대상으로 하였다. 소양호는 국내 최대 규모의 다목적 댐 저수지로, 심수와 장기 체류시간으로 인해 성층화(stratification)가 뚜렷하게 발생하며, 계절 및 수문 조건 변화에 따라 수리·수질 구조가 크게 달라진다. 이 두 수체는 각각 “합류부 특성이 두드러진 하천 환경”과 “성층화가 뚜렷한 호소 환경”을 대표하여, USV 기반 모니터링의 적용성을 다각도로 검증할 수 있는 적합한 연구대상지이다.
2.2 무인선의 제원
본 연구에서 사용된 무인선은 하천 조사에 최적화된 콤비보트형과 호소조사에 적합한 카타마란형(Fig. 2)으로 구분된다. 두 플랫폼은 모두 수리·수질 계측 장비(YSI EXO 다항목 수질센서; Acoustic Doppler Current Profiler, ADCP)를 탑재할 수 있으며, 원격 제어(Remote Control) 및 자율 주행(Autonomous Navigation)이 가능하다. 주요 제원은 Table 1과 같다.

Table 1.
Specifications of the unmanned surface vehicle (USV)
2.3 분석방법
조사는 유인 조사와 무인선 조사를 동일 조건에서 병행하여 수행하였다. 유인 조사에서는 연구자가 직접 선박을 운항하면서 YSI EXO 및 ADCP를 이용해 정점별·수심별 데이터를 취득하였다. 무인선 조사는 동일한 장비를 탑재한 후, 사전에 설정된 항로를 따라 자율 주행하면서 연속적인 데이터를 획득하였다. 이를 통해 조사 시간, 데이터 취득 밀도, 연속성측면에서 두 조사 방식 간 차이를 분석하였다.
본 연구에서 활용된 유인선은 유속 및 수질 측정을 위한 센서 장착형 선박(sensor-mounted vessel) 으로, 유량조사에 활용되는 일반적인 보트법과는 구분된다. 유인선에는 ADCP (Acoustic Doppler Current Profiler) 와 YSI 다항목 수질센서(YSI EXO2) 를 탑재하여 실시간으로 수심, 유속, 수온, 전기전도도(EC), 용존산소(DO) 등의 항목을 동시 계측하였다. 운용 시에는 보트를 이용해 정해진 측선을 따라 횡단 방향으로 이동하며 자료를 취득하였으며, 선박의 이동 속도는 약 0.3-0.5 m/s 로 유지하였다. 이는 센서의 응답시간과 수평 해상도를 고려하여 설정된 값으로, 안정적인 연속 측정을 위해 GPS와 연동하여 위치정보를 동시 기록하였다. YSI 센서는 보트에 탑재된 상태에서 수심별 하강식 측정을 병행하여 표층-중층-저층 데이터를 획득하였다. 각 측정지점에서 수심별로 센서를 일정 속도로 하강시키며 측정한 후, 동일 지점의 수온 및 전도도를 분석하여 성층 구조를 평가하였다.
무인선과의 비교 시, 유인선은 인력 투입과 조류 및 파랑의 영향을 직접적으로 받는 반면, 무인선(USV) 은 사전에 설정된 항로를 따라 자동운항하며 일정한 속도와 경로를 유지할 수 있다는 점에서 운영 효율성 및 자료의 재현성(reproducibility) 측면에서 차이를 보인다. 본 연구에서는 이러한 운용 방식의 차이와 측정 효율을 함께 비교·평가하였다.
특히 본 연구는 3차원 모니터링 기법 적용하였다. 금호강에서는 합류부 횡단면을 따라 좌안-중앙-우안 세 구간을 설정하여, 단면 내에서 유속·수질의 공간적 변화를 조사하였다. 소양호에서는 심수역을 중심으로 다수의 프로파일(profile)을 설정하여 수심에 따른 수온·용존산소·전기전도도 등의 변화를 계측하였다. 유인 조사는 정점별 간헐적 자료를 제공하였으며, 무인선 조사는 이동 경로를 따라 연속 측정이 가능하여 자료의 공간·시간 해상도가 크게 향상되었다. 예를 들어, EMAC-USV 연구에서는 약 3.3 km 구간을 주행하며 4,900개 이상의 샘플을 취득하여 공간 연속성의 장점을 입증한 바 있으며(Martinez Vargas et al., 2023), 본 연구에서도 동일한 방식으로 데이터 밀도의 차이를 정량적으로 검토하였다.
수집된 자료는 시간 동기화를 거쳐 분석에 사용하였다. YSI 자료의 경우 센서 안정화 시간(settling time)을 고려하여 이상치 제거 및 보정 과정을 수행하였고, ADCP 자료는 비유속 영역(blanking distance) 및 노이즈 신호를 제거하였다. 유인 조사와 무인선 조사의 데이터 개수를 비교하여, 단위 시간 및 단위 거리당 데이터 밀도를 산정하였다. 또한 자료의 연속성 확보 여부, 누락률, 측정 속도 차이를 함께 평가하였다(Chen et al., 2025).
정제된 자료는 수체의 2차원 및 3차원 분포를 재현하기 위해 공간 보간(Spatial Interpolation) 기법에 적용하였다. 횡단면 자료는 Ordinary Kriging 기법을 사용하여 거리-수심 분포를 작성하였고, 시계열 자료는 time-depth contour로 시각화하였다. 동일 구간의 유인 조사 자료와 무인 조사 자료를 각각 보간하여 공간 분포도를 작성한 후, 두 결과를 비교함으로써 USV 기반 조사 방식이 기존 방법 대비 가지는 재현성과 정확성을 평가하였다. 또한 교차 검증(cross-validation)을 통해 보간값과 실제 관측값의 오차를 산정하여 방법론의 신뢰성을 검토하였다.
3. 연구 결과
3.1 유인선과 무인선의 측정데이터와 측정시간의 비교
현장 모니터링에서 조사 시간은 조사 효율성과 비용, 그리고 반복 조사 가능성을 결정하는 핵심 요소이다. 유인선 조사의 경우 조사자가 직접 선박을 운항하며 측정을 수행하기 때문에 정지·전환 동작이 불가피하고, 기상 조건이나 수역 특성에 따라 조사 시간이 크게 달라질 수 있다. 반면, 무인선 조사는 사전 설정된 항로를 따라 자율적으로 주행하기 때문에 조사 과정의 일관성을 유지할 수 있으며, 동일 시간 내 더 많은 조사 횟수를 수행할 수 있는 잠재력을 가진다. 따라서 본 연구에서는 조사 시간을 정량적으로 비교하여 무인선의 운용 효율성을 검증하였다.
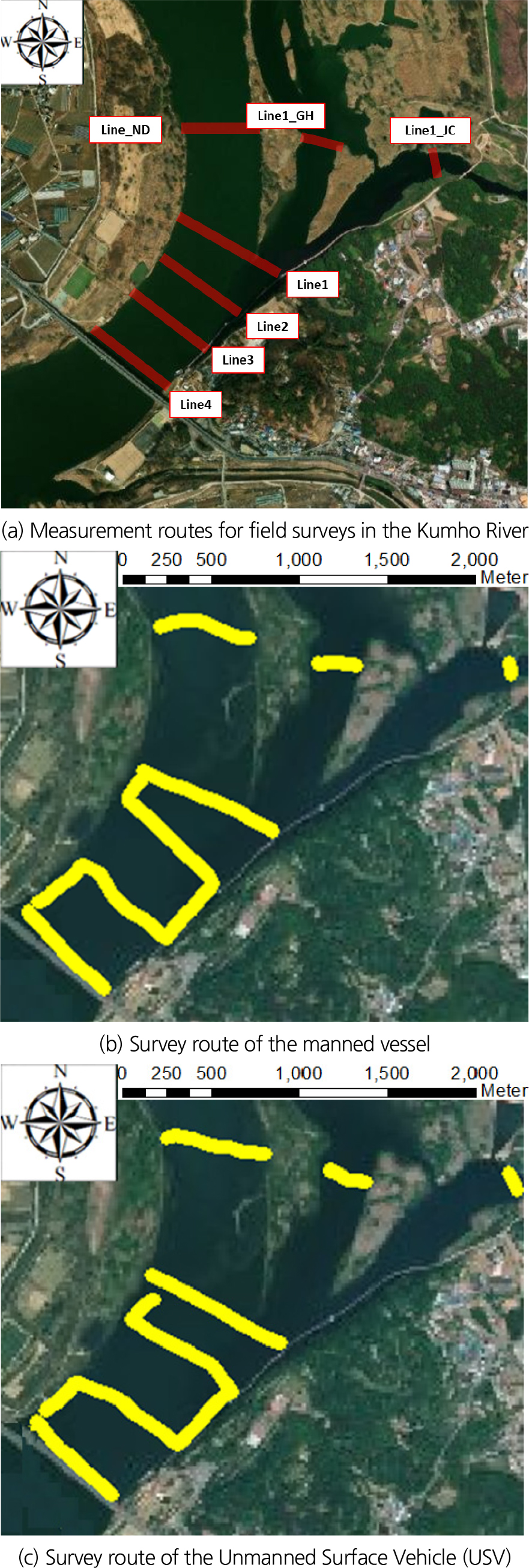
Table 2는 유 ·무인선이 동인한 측선을(Fig. 3) 따라 측정을 수행할 때 전체 수심 방향으로 계측한 전체 수질 데이터의 시간을 비교한 결과이며, 이는 각 지점에서 YSI 센서를 수심 방향으로 하강 과정에서의 계측 시간과 데이터 개수을 의미한다. Table 3은 동일 구간에서 YSI 센서로부터 취득된 데이터 포인트 수 및 그 편차를 나타낸 것으로, 이는 수심별 연속 측정 중 센서의 응답 간격과 하강 속도에 따라 결정된다. 따라서 Table 3의 데이터 개수 차이는 각 선박의 운항 안정성, 측정 속도, 그리고 수면 진동에 따른 신호 취득 빈도 차이를 반영한다.
Table 2.
Comparison of survey time between manned and unmanned surface vehicles
Table 3.
Comparison of the number of data points acquired by manned and unmanned surface vehicles
데이터의 개수는 다항목수질계측기의 데이터 반응속도를 1초간격으로 설정하여 초당데이터를 취득하였다.
조사 시간 비교에서는 모든 조사 단면에서 무인선이 유인선보다 짧은 시간을 보였다. ST1 구간에서 유인선은 434초(7분 14초), 무인선은 411초(6분 51초)로 약 23초 단축되었으며, ST2에서는 473초에서 440초로 33초, ST3에서는 454초에서 426초로 28초, ST4에서는 477초에서 440초로 37초, ST5에서는 462초에서 429초로 33초가 절감되었다. 전 구간을 종합하면 무인선은 유인선 대비 23~37초(5.3~7.8%)의 절감 효과를 보였으며, 평균적으로는 유인선의 464.5초(약 7분 45초)에 비해 무인선은 433.2초(약 7분 13초)로 약 31초(6.7%) 단축되었다. 이는 무인선이 사전 설정된 항로를 자율적으로 항주함으로써 조사자의 수동 조작에서 발생하는 불필요한 정지·전환 시간을 줄인 결과로 해석된다.
데이터 포인트 비교에서는 무인선이 유인선보다 적은 데이터 포인트를 취득하였다. ST1에서 유인선은 434개, 무인선은 411개로 23개(-5.3%) 감소하였으며, ST2는 33개(-7.0%), ST3은 28개(-6.2%), ST4는 37개(-7.8%), ST5는 33개(-7.1 %)가 줄었다. 이후 구간(ST6~ST12)에서도 유사한 경향이 관찰되었으며, ST11과 ST12에서는 각각 59개(-11.2%), 35개(-14.7%) 감소폭이 가장 크게 나타났다. 전체 평균으로는 유인선 464.5개에 비해 무인선은 425.0개를 취득하여, 약 39.5개(-8.7%)가 적게 계측되었다. 이는 무인선의 상대적으로 빠른 항속 속도, 센서 응답시간(settling time) 차이, 항로 설정 방식 등의 요인에 기인한 것으로 판단된다.
종합적으로 볼 때, 무인선은 유인선 대비 조사 시간의 단축과 조사 효율성 측면에서 뚜렷한 장점을 보였으며, 비록 데이터 개수는 평균 8.7% 감소하였으나, 여전히 수체의 3차원적 구조와 공간적 변화를 재현하는 데 충분한 밀도를 확보하였다. 따라서 무인선은 수환경 모니터링에서 시간 효율성, 안전성, 자동화 가능성 측면에서 실질적 우위를 가지며, 기존 유인 조사 방식을 보완하거나 대체할 수 있는 유망한 대안적 조사 방법임을 확인하였다.
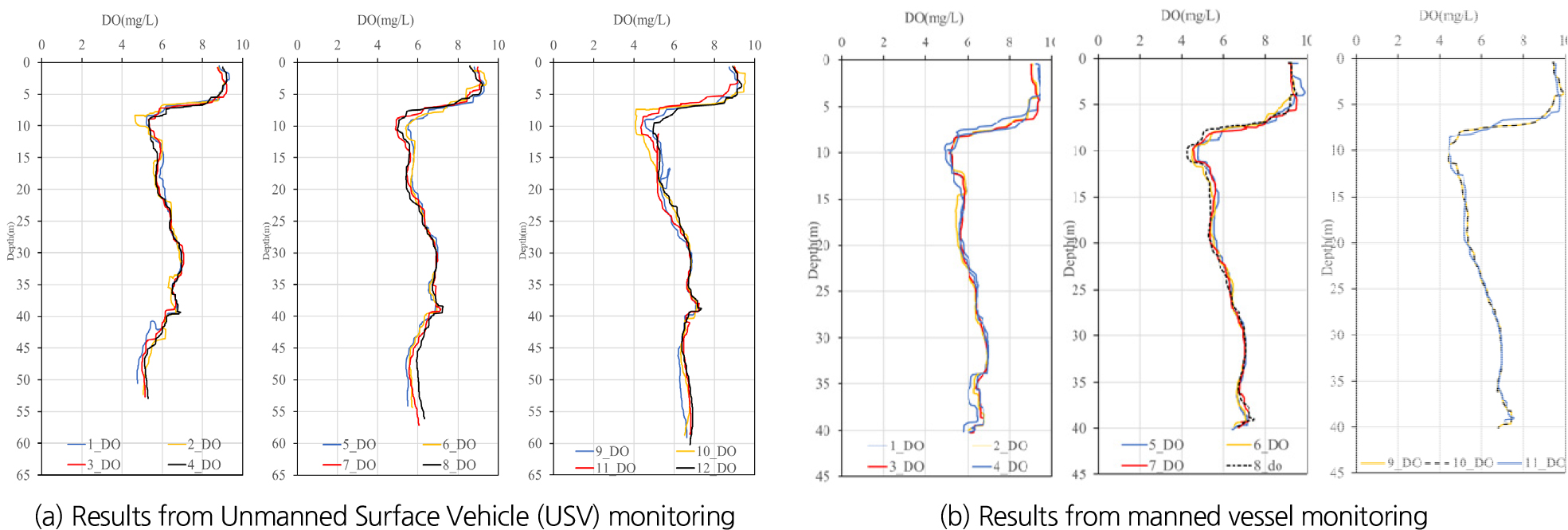
유·무인선 측정 자료의 정밀도를 검증하기 위하여 동일 지점에서의 용존산소 자료를 비교한 결과, 두 방식 간 평균 오차는 항목별로 ±5% 이내로 나타났다(Fig. 4). 이는 무인선 측정 자료가 기존 유인선 조사와 통계적으로 유의한 차이를 보이지 않음을 의미하며, 무인선 계측의 신뢰성을 입증한다. 일부 구간에서는 센서 안정화 시간(settling time)과 항주 속도의 차이로 인해 미세한 편차가 발생하였으나, 전반적인 수체 특성을 해석하는 데 큰 영향을 주지 않았다.
3.2 공간보간 비교를 통한 무인선의 모니터링 적용성 평가
금호강에서의 전기전도도(EC) 조사는 유·무인선 모두에 YSI 다항목 수질센서를 장착하고, 사전에 설정된 측선(Fig. 5)을 따라 연속적으로 이동하며 실시간으로 데이터를 취득하였다. 본 조사는 소양호와 달리 고정 정점에서의 연직 측정이 아닌, 횡단면을 따라 수평적으로 수행되었으며, 수표면 분포를 파악하기 위해, 연직방향으로는 수표면에 센서를 장착하여 조사를 진행하였다. 이를 통해 하천 내 수리·수질 분포의 공간적 변동성을 파악하였다. 또한 유인선과 무인선 간의 공간 보간 결과 차이는 운항 속도 차이보다는 무인선의 측점 분포 밀도와 간격의 균질성에 기인한 것으로 판단된다. 본 연구에서 언급한 ‘항로 일관성’과 ‘측선 직교성’은 단순히 하천의 흐름에 직각으로 설정된 경로를 의미하는 것이 아니라, 각 측선 간의 간격과 횡방향 측점 수를 일정하게 유지함으로써 공간 해상도를 균일하게 확보한 조사 설계를 의미한다. 이러한 정밀한 항로 재현성과 일정한 측점 간격 유지가 무인선 조사 자료의 공간적 일관성을 보장하여, 보간 과정에서 국지적 변동성을 정밀하게 반영하도록 한다. 금호강에서 유·무인선 조사 자료를 바탕으로 전기전도도(EC)에 대한 공간 보간을 수행한 결과, 두 방식 간 공간 재현성에서 뚜렷한 차이가 확인되었다(Fig. 6). 유인선 조사 자료는 정점 간 간격이 넓고 특정 구간에 집중되는 특성을 보여, 공간 보간 시 일부 지역에서는 값이 불연속적으로 나타났다. 특히 합류부 인근에서는 급격한 수질 변화가 매끄럽게 연결되지 못하고 평탄화(flattening)되는 경향이 뚜렷하게 나타났다. 이는 유인선 조사 방식의 제한된 측점 수와 불균질한 분포로 인해 공간 해상도의 제약이 발생했기 때문으로, 국지적 수질 변화를 충분히 포착하지 못했음을 의미한다.
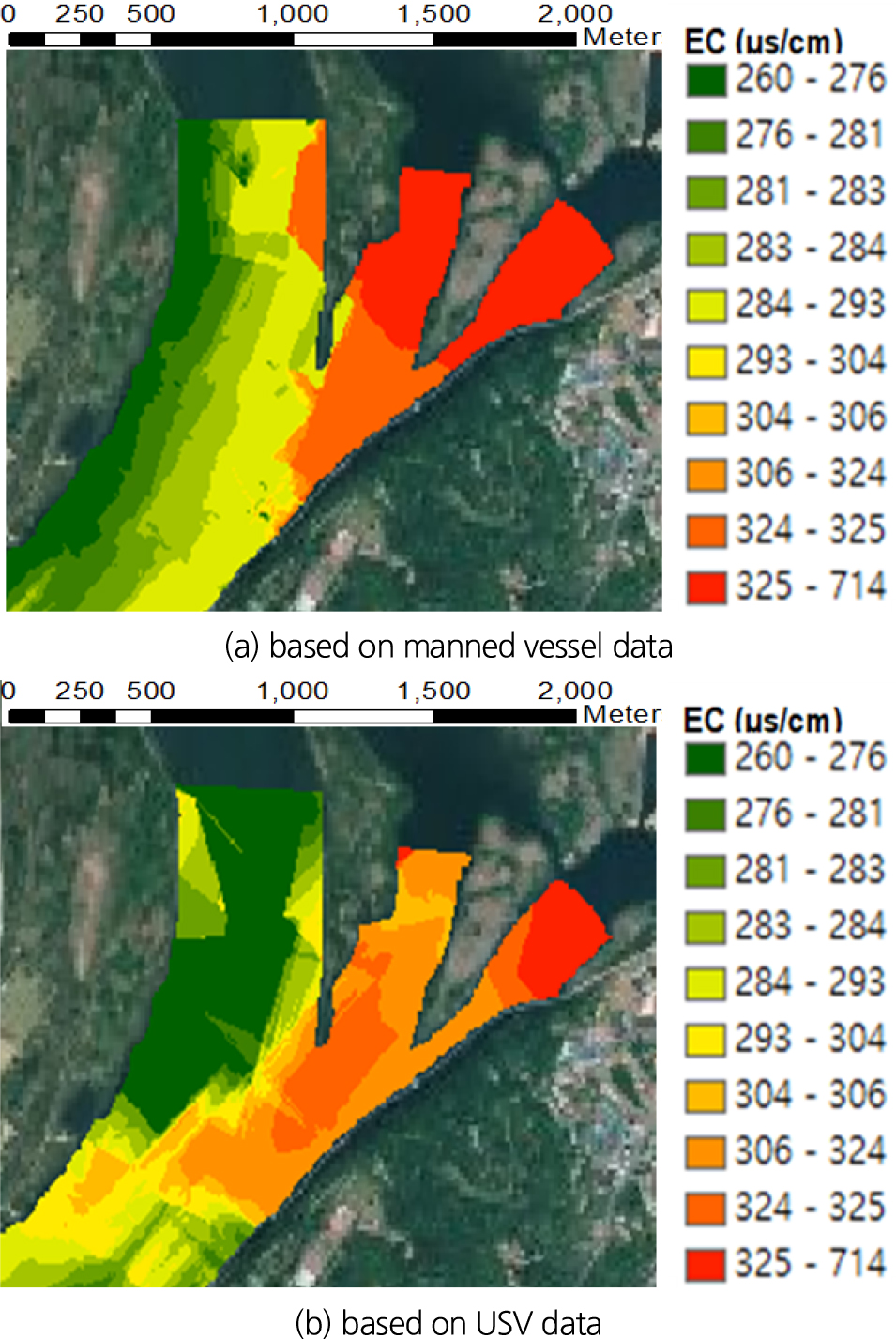
반면, 무인선 조사 자료는 동일 구간 내에서 측선 간 간격이 일정하고 측점이 촘촘히 분포하여, 전체적으로 균질한 보간 결과가 나타났다. 지류 유입부와 본류 사이의 전도도 경계가 뚜렷하게 재현되었으며, 특히 합류부 주변에서는 유속과 수질의 공간적 경계가 명확히 드러나 유인선 조사에서는 확인하기 어려운 미세 공간 구조가 무인선 조사 결과에서는 효과적으로 표현되었다. Table 4의 결과를 보게되면 무인선이 측점 수와 간격을 일정하게 유지함으로써 공간 해상도를 높이고, 좁은 수역에서도 고해상도 모니터링을 가능하게 함을 보여준다. 즉, 무인선의 공간 재현성 향상은 운항 방식의 차이라기보다 데이터 밀도와 분포 균질성에 기반한 해상도 효과로 해석할 수 있다. 따라서 무인선 기반 조사는 공간 보간의 효율성과 정확성을 동시에 향상시키는 효과적인 수단으로 평가된다.
Table 4.
Comparison of raw and spatially effective data between manned and unmanned surveys
특히 YSI 다항목 수질센서는 1 Hz (1초 간격) 주기로 데이터를 취득하며, 현장 계측 시에는 수초 단위의 고밀도 연속 데이터가 생성된다. 그러나 본 연구에서는 공간 통계 분석(베리오그램, RMSE 등) 및 보간 과정의 일관성을 확보하기 위해, 시간 기준 데이터가 아닌 공간 기준 등간격 리샘플링을 수행하였다. 즉, 실시간으로 취득된 1초 단위의 원시 데이터(raw data)를 일정 간격(약 10 m 내외)으로 공간 보간 기준에 맞게 재구성함으로써, 중복된 위치나 정지 구간에서의 과다 샘플을 제거하고 공간적으로 대표성 있는 유효 포인트 만을 분석에 활용하였다. 이 과정에서 유효 포인트 수는 실제 취득된 전체 데이터 수보다 현저히 적지만, 이는 공간 해석을 위한 표준화 절차로서, 포인트 간 간격의 균질성을 확보하고 공간 자기상관 구조의 왜곡을 방지하기 위함이다. 또한, 유인선의 경우 수동 운항으로 인해 속도 및 방향의 미세한 변동이 존재하였으나, 무인선(USV)은 자율항법 시스템에 기반하여 일정한 속도와 항로를 유지함으로써 포인트 간 간격의 일관성이 높게 유지되었다. 이러한 차이는 이후의 베리오그램 분석에서 유인선의 높은 nugget (0.41) 과 무인선의 낮은 nugget (0.18) 값으로 정량적으로 나타났으며, 이는 데이터의 공간 분포 균질성이 결과적으로 보간 정확도(RMSE) 향상에 기여했음을 뒷받침한다. 유인선 자료 또한 1 Hz 주기의 원시 데이터를 공간 좌표 기준으로 재추출하여 사용하였으나, 조사 속도의 불균질성과 GPS 오차로 인해 포인트 간 간격이 완전한 등간격으로 유지되지는 않았다. 반면, 무인선 자료는 자율항법에 따라 일정 속도를 유지하여 공간 간격이 보다 균질하게 확보되었다.
3.3 공간보간 신뢰성 검증
Table 5의 결과처럼 베리오그램 분석에서도 두 조사 방식의 차이가 분명하게 확인되었다. 유인선 조사 자료는 측정 정점의 수가 적고 분포가 불균질하여 nugget 값이 크게 산정(0.41) 되었으며, 이는 단거리에서의 국지적 변동성을 충분히 반영하지 못했음을 의미한다. 또한 range 값이 125 m로 길게 평가되어, 공간적 자기상관이 실제보다 완만하게 해석되는 경향을 보였다.
Table 5.
Summary of quantitative indicators for spatial interpolation analysis
| Category | Nugget/Sill | Range (m) | R2 | RMSE (µS/cm) | Mean NND (m) | CV (%) |
| manned vessel | 0.41 | 125 | 0.945 | 15.1 | 18.7 ± 7.9 | 42.1 |
| USV | 0.18 | 74 | 0.987 | 6.8 | 11.4 ± 4.2 | 19.5 |
이러한 특성은 유인선 자료로 생성된 공간 보간 결과가 세밀한 변화를 반영하지 못하고 전반적으로 평탄한 분포를 나타내는 주요 원인으로 작용하였다. 반대로 무인선(USV) 조사 자료는 측정 포인트가 균질하게 분포하고 간격이 촘촘하여, nugget 값이 0.18로 작고 sill에 빠르게 수렴하는 형태의 베리오그램이 도출되었다. range 값 또한 74 m로 짧게 산정되어, 근거리 변화를 보다 정밀하게 반영할 수 있음을 보여주었다. 이러한 결과는 무인선 자료가 실제 공간 구조를 충실하게 재현할 수 있는 통계적 기반을 제공함을 의미하며, 자율항법 기반의 일정한 항로 유지가 데이터의 공간 분포 균질성 확보에 효과적으로 기여하였음을 시사한다. 공간 보간 결과의 신뢰도를 교차검증을 통해 평가한 결과 역시 무인선 조사 자료의 우수성을 정량적으로 뒷받침하였다. 전기전도도(EC)를 기준으로 분석한 결과, 유인선 자료의 결정계수(R2)는 0.945, RMSE는 15.1 µS/cm, 무인선 자료는 R2가 0.987, RMSE가 6.8 µS/cm로 산정되어, 무인선 측정자료의 예측값과 실측값 간의 일치도가 크게 향상되었음을 확인하였다. 이는 무인선 자료가 국지적 변동성을 보다 정밀하게 반영하고, 공간 보간 결과의 신뢰도와 재현성을 동시에 향상시켰음을 의미한다.
또한, 공간 보간의 품질에 영향을 미치는 측정지점의 분포 특성을 정량적으로 검토하기 위해 평균 최근접거리와 포인트 밀도의 변동계수를 산정하였다. 그 결과, 유인선의 평균 최근접거리는 18.7 ± 7.9 m, 무인선은 11.4 ± 4.2 m로 나타났으며, 포인트 밀도의 변동계수는 유인선 42.1%, 무인선 19.5%로 평가되었다. 이 결과는 무인선 자료가 측정 포인트 간 간격이 더 일정하고, 공간적으로 균질하게 분포하였음을 의미한다. 특히 무인선은 사전 설정된 항로를 자율적으로 항주하면서 정밀한 직교 측선을 유지하였기 때문에, 공간상 누락 구간이 최소화되고 국지적 변화가 더 세밀하게 표현되었다.
이러한 통계적·공간적 분석 결과를 종합하면, 유인선 조사 자료는 제한된 정점 수와 불균질한 공간 분포로 인해 공간적 패턴을 단순화하고 평탄하게 재현하는 경향이 있는 반면, 무인선 조사 자료는 국지적 변동성을 충실히 반영하여 합류부 주변의 미세한 수질 경계와 공간 구조를 정밀하게 재현하였다. 따라서, 무인선 기반의 고해상도 모니터링은 단순히 기존 유인선 조사의 대체 수단을 넘어, 공간 보간 결과의 품질과 신뢰도를 실질적으로 향상시킬 수 있는 효과적인 조사 방법임이 본 연구를 통해 입증되었다.
4. 결 론
본 연구는 무인선을 활용한 수환경 모니터링의 적용성을 검토하기 위하여 호소(소양호)와 하천(금호강)을 대상으로 유·무인선 병행 조사를 수행하였다. 연구의 목적은 무인선이 기존 유인 조사 방식에 비해 가지는 효율성, 데이터 품질, 공간 해석 능력, 그리고 현장 적용 가능성을 다각도로 평가하는 데 있었다.
먼저 소양호에서의 조사 결과, 무인선은 동일 조사 구간에서 유인선에 비해 평균 6.7 %의 조사 시간 단축 효과를 보였다. 이는 조사 효율성을 향상시켜 동일한 시간 내 더 많은 구간을 조사할 수 있음을 의미한다. 데이터 개수는 평균적으로 유인선보다 8.7 % 적게 확보되었으나, 수체의 3차원 구조를 재현하기에는 충분한 밀도를 유지하였다. 즉, 데이터 수량의 절대적 차이는 크지 않았으며, 오히려 연속적 항주를 통한 데이터 분포의 균질성이 공간 해석에 긍정적으로 작용하였다. 본 연구에 활용된 무인선은 GPS 기반 자율항법 시스템과 장애물 자동회피(Auto-Avoidance) 기능이 탑재된 플랫폼으로, 사전에 설정된 항로를 따라 일정한 속도와 경로를 유지하며 측정을 수행하였다. 이러한 자율주행 기능은 조종자의 지속적인 조작이 불필요하여 피로도를 크게 감소시키며, 동시에 반복 측정 시 동일 위치·경로를 재현할 수 있다는 점에서 자료의 공간적 일관성과 정밀도를 확보할 수 있다. 금호강에서는 무인선의 장점이 더욱 두드러졌다. 유인선 자료는 정점 간 간격이 넓어 공간 보간 시 특정 구간에서 불연속적 패턴이 나타났으나, 무인선 자료는 연속적으로 촘촘히 분포하여 합류부 인근의 수질 경계와 국지적 변화를 더 정확하게 반영하였다. 베리오그램 분석에서도 무인선 자료는 nugget 값이 작고 sill 에 빠르게 수렴하며 range 가 짧게 산정되어, 근거리 공간 상관성을 정밀하게 반영할 수 있는 특성을 보였다. 반면 유인선 자료는 nugget 값이 커서 단거리 변동성을 충분히 반영하지 못했고, range 가 길어 공간적 자기상관을 실제보다 완만하게 평가하는 경향을 보였다.
한편, 유·무인선 간 공간 보간 결과의 차이는 항법 성능이나 운항 속도보다는 측점 수와 간격의 차이에 따른 공간 해상도 효과에서 기인한 것으로 판단된다. 본 연구에서 언급한 항로의 일관성과 측선 간 일정 간격 유지란, 단순히 하천 흐름에 직교하도록 측선을 설정했다는 의미가 아니라 동일 구간 내에서 측점 분포를 균질하게 확보하여 공간 해상도를 일정하게 유지한 조사 설계를 의미한다. Fig. 5에 제시한 바와 같이, 무인선은 각 측선에서 횡방향 측점 수가 많고 간격이 일정하여, 결과적으로 보간 시 국지적 변동성이 더 정밀하게 재현되었다. 따라서 무인선이 보여준 공간 재현성의 향상은 장비의 기술적 차이보다는 데이터의 밀도와 분포 균질성에 기반한 해상도 차이로 해석된다.
또한 신뢰도 분석에서 무인선의 우수성이 정량적으로 입증되었다. 전기전도도 (EC) 항목을 기준으로 교차검증을 수행한 결과, 유인선 자료는 R2 94.5 %, RMSE 15.1 µS/cm로 평가된 반면, 무인선 자료는 R2 98.7 %, RMSE 6.8 µS/cm로 나타났다. 이는 무인선 자료가 실측값과 예측값 간의 일치도가 높아 보간 결과의 신뢰도가 크게 향상되었음을 보여준다. 결국 무인선은 단순히 데이터를 더 많이 수집하는 수준을 넘어, 국지적 변동성을 정밀하게 반영하고 공간 해석의 품질을 실질적으로 개선할 수 있는 장점을 가진다. 무인선의 장점은 여기에서 그치지 않는다. 첫째, 조사 효율성 측면에서 무인선은 조사 시간을 단축하여 동일 인력과 장비로 더 많은 조사 범위를 커버할 수 있다. 둘째, 안전성 측면에서 조사자가 직접 수역에 진입하지 않아도 되므로 급류·심수·악천후 등 위험 상황에서 인명사고 가능성을 줄일 수 있다. 셋째, 자동화 및 일관성 측면에서 무인선은 사전 설정된 항로를 따라 자율 주행이 가능하므로, 조사자의 숙련도나 상황적 변수에 따른 편차를 줄이고 조사 품질의 일관성을 유지할 수 있다. 넷째, 데이터 활용성 측면에서 무인선이 확보한 고해상도 연속 데이터는 수리·수질 모델링, 수체 예측 시스템, 그리고 인공지능 기반 분석 등 후속 연구에 활용 가능성이 높다.
따라서 본 연구는 무인선이 유인 조사 방식의 한계를 보완하거나 대체할 수 있는 유망한 기술임을 입증하였다. 특히 무인선은 시간 효율성, 안전성, 자동화 가능성, 데이터 신뢰도 측면에서 뚜렷한 장점을 보였으며, 금호강과 소양호 사례를 통해 그 적용성이 실제 현장에서 확인되었다. 향후에는 무인선에 탑재할 수 있는 센서의 다양화, 장기간 운용을 위한 배터리 지속성 확보, 통신 안정성 강화, 그리고 인공지능 기반 실시간 데이터 처리와의 결합이 필요할 것이다. 이러한 발전이 뒷받침된다면, 무인선은 수환경 모니터링의 핵심 플랫폼으로 자리매김할 수 있으며, 국가 수자원 관리와 수생태계 보전에 실질적으로 기여할 수 있을 것으로 기대된다.
