

1. 서 론
2. 연구 방법
2.1 UAV영상 기반 육상지형 계측 방법
2.2 UAV영상 기반 근해의 해저지형 계측 방법
2.3 육상-해저 통합 DEM 구축
3. 연구 대상 지역 및 자료 수집
4. 3차원 고해상도 해안지형 생성 결과
5. 결 론
1. 서 론
해안 지형의 변화를 이해하고 예측하는 것은 지속가능한 해안환경 관리와 보호를 위해 중요하며, 이를 위해 정확한 시공간적 고해상도의 지형 자료를 구축하는 것은 필수적이다. 일반적으로 적용되는 토탈 스테이션이나 GPS를 등 접촉식 측량 장비는 신뢰성이 높지만 시간, 노동, 장비 구축 비용이 많이 필요해 시공간적인 해상도를 높이는 데에는 한계가 있다.
접촉식 계측법의 한계를 보완하기 위해 최근에는 위성, CCTV, light detection and ranging (LiDAR) 등을 활용한 원격탐사 기반의 지형 모니터링 기법이 다양하게 적용되고 있다 (Genchi et al., 2020; Caballero and Stumpf, 2021). 그 중 위성이나 CCTV는 2차원 지형 변화 분석에 제한적으로 적용된다. LiDAR는 3차원 지형 모형을 구축하는 데에 매우 효과적이지만 장비 구축 비용이 많이 필요하다(Gesch et al., 2016). 특히 해저면 지형 측량 시 수체 특성에서 기인한 오차가 발생할 수 있어 탁도의 계측과 함께 상당수 보정작업을 해야하는 어려움이 있다(Richter and Maas, 2022).
최근에는 무인비행체(unmanned aerial vehicle, UAV) 영상을 활용하는 Structure-from-Motion Multi-View Stereo (SfM-MVS)가 해안지형 조사 기법으로 주목받고 있다(Westoby et al., 2012; Genchi et al., 2020; Caballero and Stumpf, 2021). 이 방법은 중복 지역이 촬영된 영상 간 특짐점 매칭을 통해 수치 표고 모형(digital elevation model, DEM)을 구축하는 방법으로 해안지역의 침퇴적 양상 조사에 성공적으로 적용되고 있다(Nakano et al., 2014; Pikelj et al., 2018).
해저 지형 측량에는 레이다 측정(Chénier et al., 2018; Ma et al., 2021), X밴드 해상 레이다(Bell, 1999), LiDAR (Halls and Costin, 2016; Harry et al., 2018) 또는 다중 또는 초과 스펙트럼 반사 모델링(Lyzenga, 1978; Sandidge and Holyer, 1998; Lee et al., 1999; Ma et al., 2014)과 같은 다양한 원격 탐사 기법들이 적용되고 있다. 그러나 이러한 방법들은 경험적 모델과 매개 변수(Ma et al., 2021), 그리고 다수의 동시 지상 실측 데이터(Ashphaq et al., 2021)를 필요로 한다. 대안 기술로서, 선형 분산관계식을 이용해 파랑장 영상으로부터 수심을 간접적으로 추정하는 수심 역산 기술(depth inversion algorithm, DIA)이 지속적으로 개발되고 있다(Holman et al., 2013; Simarro et al., 2019; Holman and Bergsma, 2021; Gawehn et al., 2021; Kim et al., 2023).
영상 기반 DIA 기술의 핵심은, 고층 건물이나 UAV에 부착된 카메라로 촬영된 영상으로부터 파랑 매개변수(파장, 주기)의 공간분포를 파악해 분산관계식에 대입해 수심을 산정하는 것이다. 주기는 시계열 파랑 영상의 시간축 푸리에 변환으로, 파장은 공간 2D 푸리에 변환(Dugan et al., 2001; Senet et al., 2008) 또는 단일 위상에 대한 입자 영상 유속계(Particle Image Velocimetry, PIV) 분석(Gawehn et al., 2021)등을 통해 추출할 수 있다.
그러나 파랑장 영상에는 다양한 파랑과 오차요인이 중첩되어 있어 중력파 성분만을 추출해 분석할 필요가 있다. 이에 Cbathy (Holman et al., 2013; Holman and Bergsma, 2021), COCOS (Gawehn et al., 2021), 그리고 Ubathy (Simarro et al., 2019; Simarro and Calvete, 2022) 같은 대부분의 DIA 기법들은 스펙트럼 기반의 모드 분해 기법으로 주요 파랑 성분을 추출하는 방식을 채택하고 있다. 한편, Bergsma and Almar (2018)는 스펙트럼 방법보다 파랑장의 시계열을 직접 분석하는 방법이 불규칙한 파랑에서 파속 추출 시 이점이 있음을 보고했다. 이를 고려하여 최근 Kim et al. (2023)은 시계열 파랑장 자료에 PIV를 적용해 파속을 직접 산정하는 DIA 알고리즘을 제시했다.
상술한 수체 내 외부 계측방법의 특징은 UAV로 촬영한 영상자료를 이용한다는 공통점이 있다. 이에 착안해 본 연구는 단일 UAV만을 이용하여 수체 내·외부의 지형정보를 짧은 시간 내에 계측할 수 있는 기술을 제시한다. 이 기술은 다음과 같이 세 가지 세부 기술로 구성된다. 첫째로 공간 스캐닝 이미지를 이용한 SfM-MVS 기반 3차원 수치 표고 모형을 생성하는 기술이다. 해저 지형 측량에는 Kim et al. (2023)에서 제시된 수심 역산 알고리즘이 적용된다. 그리고 지오이드 모델 기준 표고 보정 및 쇄파대와 소상대 등의 미계측 영역 내삽을 통해 해안 지형 통합 DEM을 구축한다.
2. 연구 방법
2.1 UAV영상 기반 육상지형 계측 방법
2.1.1 Structure-from-Motion Multi-View Stereo (SfM-MVS)
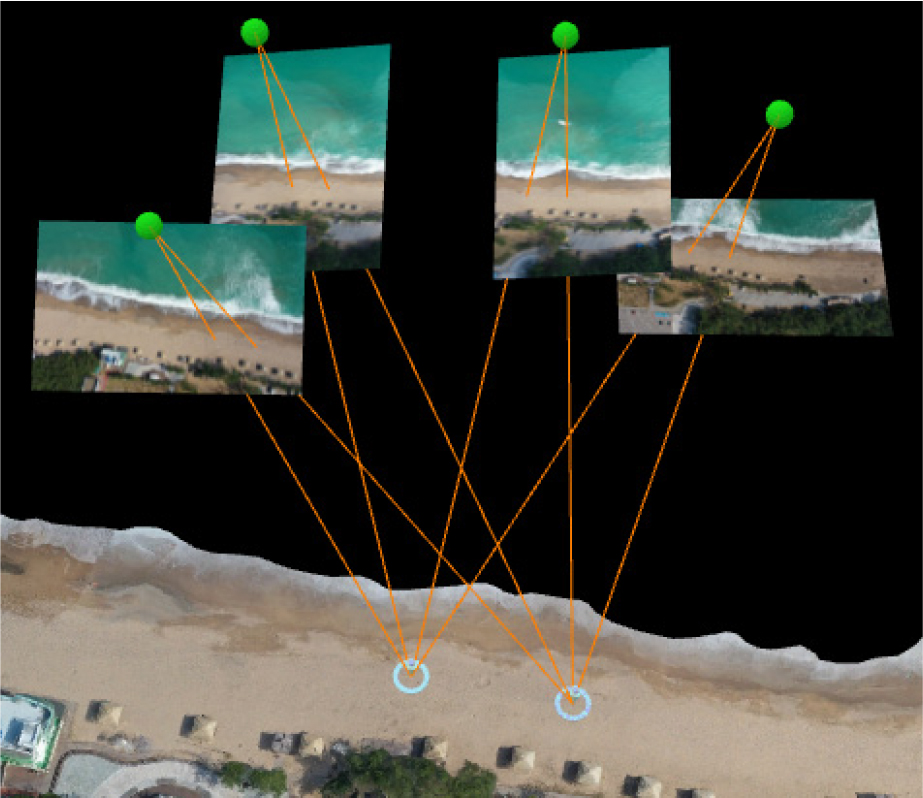
SfM-MVS는 공간이 중첩된 여러 영상으로부터 점군데이터(point cloud)를 구축하는 방법으로 SfM (Szeliski and Kang, 1994)과 MVS (Scharstein and Szeliski, 2002) 기법을 순차적으로 적용한다. 공간 중첩된 영상들로부터 SfM이 카메라의 위치와 자세 정보를 추정하여 성긴 점군데이터를 형성하면(Fig. 1) MVS 단계에서는 고밀도화된 점군 데이터를 얻는다.
SfM은 스케일링과 자세의 영향이 없는 scale invariant featue transform (SIFT; Lowe, 2004)을 적용해 특징점을 추출한다. 이후 random sampling consensus (RANSAC; Fischler and Bolles, 1981)를 적용해 특징점끼리 쌍을 이루면 이를 바탕으로 영상을 정합하고 영상 간 특징점들의 위치 차이를 이용해 카메라의 3차원 좌표를 최적화하여 성긴 점군 데이터를 구축한다.
SfM의 결과인 성긴 점군데이터는 MVS 알고리즘을 통해 고밀도화된다. MVS는 픽셀 매칭 알고리즘 중 하나로, 몇 개의 화각이 서로 다른 카메라 매트릭스가 주어졌을 때 달라진 화각과 픽셀의 위치 차이를 바탕으로 3차원 점군 데이터를 구축한다. 구체적으로, MVS 알고리즘은 2차원 영상으로부터 3차원 거리인 깊이 정보를 영상마다 추정한 뒤 이웃한 영상 간 추정된 깊이 정도를 참조하여 표면의 법선벡터를 계산해 최종적으로 고밀도화된 점군데이터를 구축한다.
본 연구에서는 Pix4dMapper 소프트웨어(Pix4D, 2023)를 활용해 SfM-MVS를 수행했다. 알고리즘 설정은 Pix4d Mapper의 기본값으로 설정되었으며 세부적으로는 특징점 추출은 최대로, 그리고 MVS 단계에서는 1/2 해상도의 영상에서 최적 밀도의 점군데이터를 구축하도록 설정하였다.
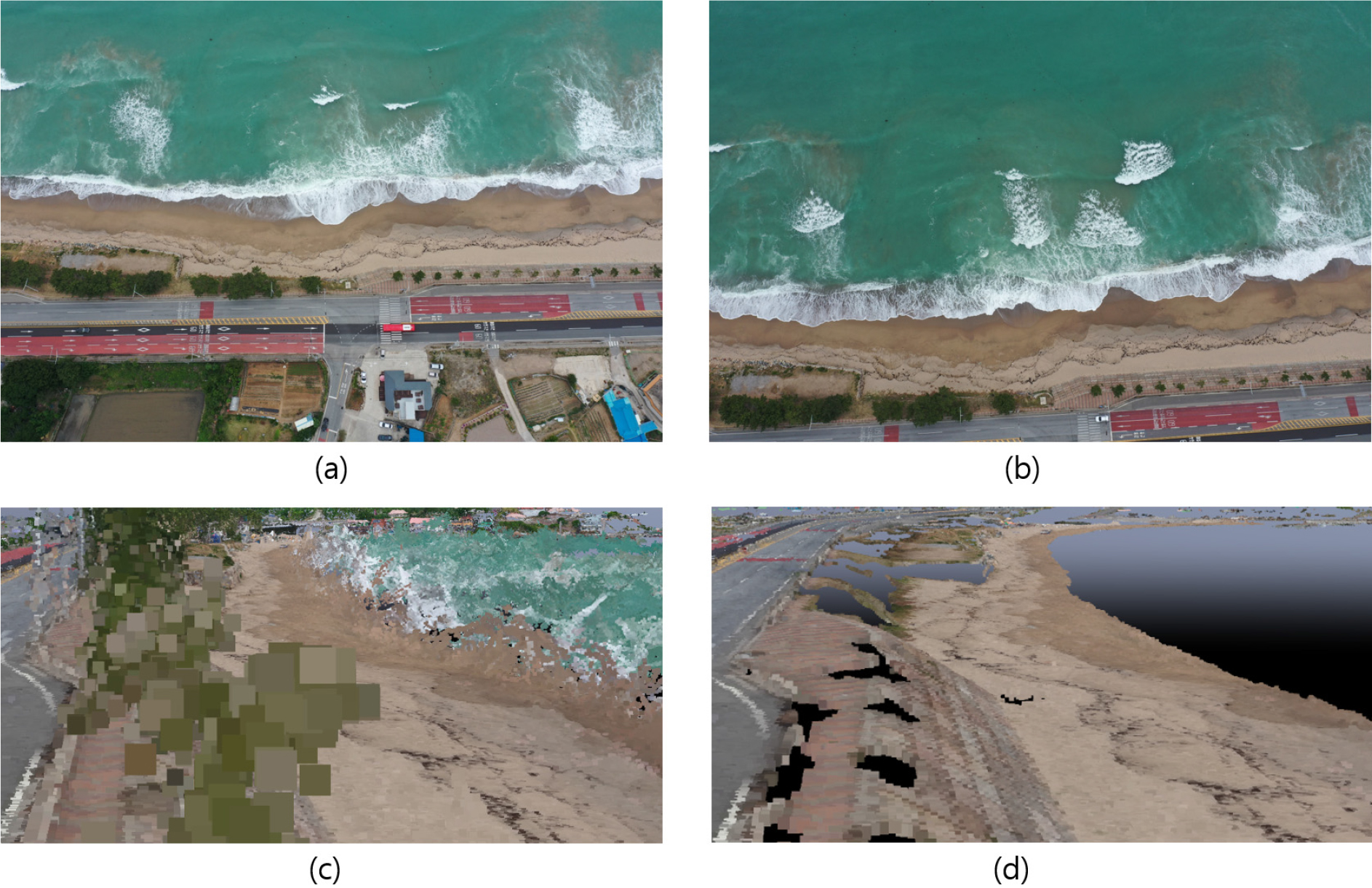
한편, 처오름으로 인해 해안선 부근에서는 그림 2와 같이 시간에 따라 공간 스캔 영상 간 수면 패턴의 위치가 다르게 나타난다(Figs. 2(a) and 2(b)). 처오름으로 인해 두 영상 간 해안선 부분의 특징점의 위치가 크게 변화하는 경우에는 SfM-MVS가 이를 고정된 수표면이 드론의 촬영 위치가 변화해 다르게 보이는 것으로 인식해 Fig. 2(c)와 같이 신뢰도가 낮은 점군 자료를 구축하게 된다. 따라서 Fig. 2(d)와 같이 고밀도 점군데이터에서 신뢰도가 낮은 영역을 제외하였다. DEM 저장 시 점군데이터가 없는 영역은 내삽되기 때문에 DEM의 좌표 리샘플링 과정에서 신뢰도가 낮은 해안선 부근은 고밀도 점군데이터의 위경도 좌표를 참조하여 제거하였다.
2.2 UAV영상 기반 근해의 해저지형 계측 방법
본 연구에서는 해저 지형 측량을 위해 Kim et al. (2023)이 개발한 수심역산 방법을 적용한다. 이 방법은 전처리 단계와 선형 분산관계식을 이용해 수심을 역산하는 두 단계로 구성되어 있다. 하위 절에서는 적용된 전처리 기술들과 수심 역산 알고리즘을 서술한다.
2.2.1 파랑장 시계열 영상에 대한 전처리
UAV 동영상 내 파랑장 신호는 수면에서 반사되거나 및 대기 및 수체에서 산란된 일광의 광도를 디지털 신호 로부터 추출할 수 있다. 반사광 및 산란광은 수면의 움직임에 따라 변화하기 때문에 카메라 센서에 감지된 값을 수위로 가정해 통해 파의 특성을 추정할 수 있다. 하지만, 이러한 광학 신호는 날씨, 카메라 왜곡, UAV의 움직임 등 기계적 불확실성 등 다양한 요인에 의하여 오염되고 왜곡될 수 있다. 따라서, 파랑장 분석 이전의 자료 전처리 과정이 필수적이다.
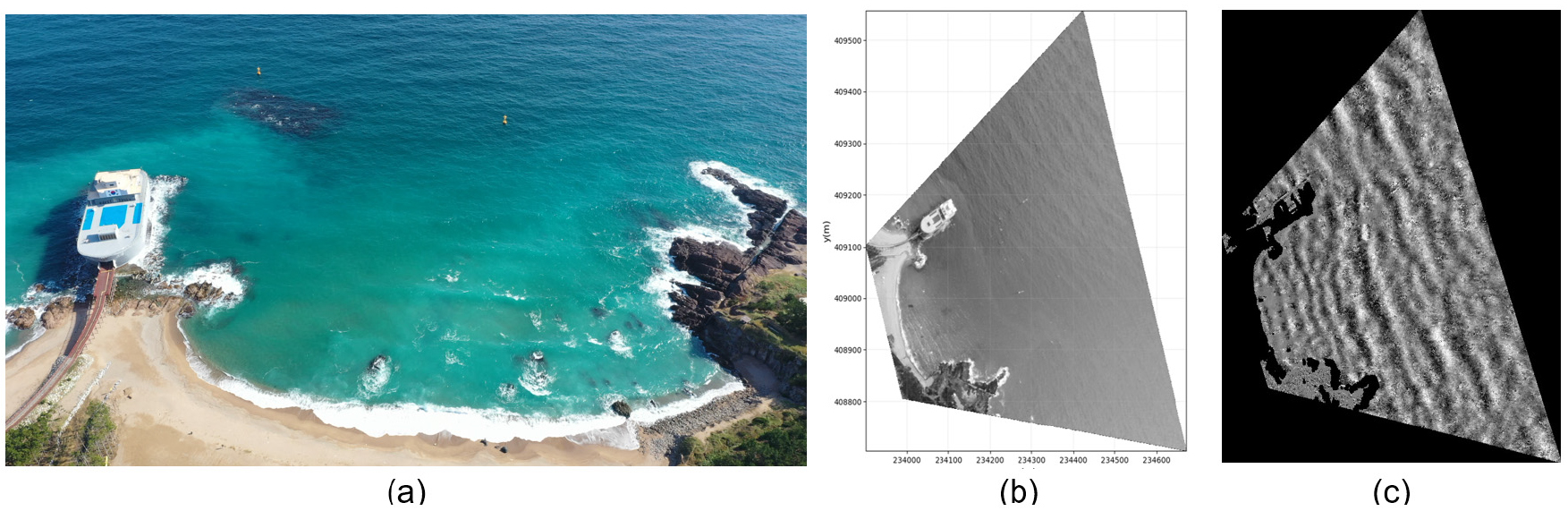
본 연구에서는 Kim et al. (2023)에서 제안된 전처리 절차를 따르며 영상 크기 조정, ROI 제외 영역 마스킹, 렌즈왜곡 보정, 정사보정, 좌표보정을 포함한다. 본 연구의 분석 대상은 외해측으로부터의 입사되는 천수파이다. 시공간 스케일은 해당 파의 주기와 파장을 기준으로 결정할 수 있는데 계산시간의 절약을 위해 공간 스케일은 이미지의 각 픽셀이 포함하는 실제 영역의 크기가 ~1 m2 수준이 되도록 Rancos Kernel (Duchon, 1979; Madhukar and Narendra, 2013)을 이용하여 축소하였으며, 시간 스케일은 초당 24 프레임의 영상을 매 12프레임마다 평균하여 초당 2 프레임으로 리샘플링하였다. 체스보드 형태의 보정판을 통해 영상의 방사형 왜곡을 보정했다. UAV 카메라의 촬영 각도를 이용해 경사영상을 정사영상(ortho-photo)으로 변환했다. 그리고 Kim et al. (2023)에서 제안한 적색 신호값을 지표로 한 적응형 마스킹 기법을 적용해 쇄파대 영역을 분석에서 제외했다. 이후, 각 영상에 포함되어 있는 대공표지판의 지역 좌표 측량 결과를 통하여 지역 좌표계로 재투영되었다. Fig. 3는 각 전처리 과정을 통해 재투영된 파랑장 영상의 예시이다.
뿐만 아니라, 원시 영상으로부터의 는 분석 대상인 입사 중력파 이외에, 풍파, 경면반사광, 배경조건의 변동, 움직이는 물체(사람, 선박 혹은 새) 등에 의한 신호가 포함되어 있다. 정확한 수심 역산을 위해 입사 중력파를 정확하게 추출해낼 필요가 있다. 본 연구에서는 Kim et al. (2023)에서 제시된 바와 같이 신호들의 시간 스케일로부터 강건하게 모드를 구분해 내는 앙상블 경험적 모드 분해(Ensemble Emrpirical Model Decomposition, EEMD; Wu and Huang, 2009)기법을 적용하였다. EEMD는 포락선 분석을 통해 복잡한 비선형, 비정상의 자료를 유한한 수의 고유 모드 함수(Intrinsic Mode Function, IMF)로 분해하며 모드 분해 기준에 사용자의 주관적 개입 없이 자료에 적응(Adaptive)하여 명확하게 분리할 수 있다는 점에서 장점이 있다(Chang, 2010). EEMD 기법에 대한 보다 자세한 설명은 Wu and Huang (2009)에서 찾을 수 있다. EEMD로 추출된 IMF 중 가장 기여도가 강한 모드를 분석 대상 신호로 채택하였다.
2.2.2 Depth Inversion Algorithm (DIA)
DIA의 기본적인 원리는 공간적으로 산정된 파수와 주기를 선형 분산관계식에 대입하여 수심을 역산하는 것이다.
여기서, 는 수심, 는 파수, 그리고 는 주파수이다. 주기의 경우, 특정 픽셀에서의 IMF에 대한 파워 스펙트럼을 계산해, 유효 주파수 범위 내 주파수 성분을 기여도로 가중 평균하여 결정한다. 주기 및 주파수를 산정하면 주요 모드의 시계열 영상에 광대역 표층 영상 유속계(Large-scale particle image velocimetry, LSPIV) 기술(Fujita et al., 1998; Muste et al., 2008)을 적용해 파수를 산정할 수 있다. LSPIV는 일정 시간 간격의 연속된 이미지 쌍으로부터 식별 가능한 패턴의 변위를 인식하여, 단위시간동안의 패턴 속도를 계측하는 방법이다(Benetazzo et al., 2017). LSPIV 적용에 앞서 EEMD를 통해 파랑 영상에서 순수 입사파의 파봉선 패턴의 시계열을 추출하였다. 추적 가능한 입자를 주입해 인위적인 패턴을 만들어 물 입자의 순간유속을 산정하는 일반적인 LSPIV 기법과 달리 본 연구에서는 여러 개의 파봉선들이 이루는 패턴을 분석하였으며 파봉 패턴의 이동속도는 파속과 같다. 128, 64 픽셀의 두 개의 서브윈도우를 설정해 연속된 두 프레임 간 입사파 패턴이 최대 교차 상관관계를 갖는 변위를 찾아 시간간격 에 대한 순간파속 을 산정했다. 이를 통해 결정된 주기와 파수를 Eq. (1)에 대입하여 관측 대상 지역에 대한 수심장을 맵핑하였다.
2.3 육상-해저 통합 DEM 구축
육상과 해저면의 통합 DEM을 구축하기 위해서는 위에 서술한 두 방법으로 각각 생성된 DEM을 정합했다. 육상 지역은 SfM-MVS 알고리즘 보정 과정에서 KNGeoid18 기반 고도로 변환된 DEM을 반환하지만 DIA는 수심을 결과값으로 하기 때문에, 해수면과 지오이드고를 참조해 해저 지형을 표고로 변환한 뒤 두 DEM을 하나로 정합했다.
상술한 바와 같이 SfM-MVS는 소상대의 처오름 영역 및 수면을, Kim et al. (2023)은 쇄파대를 각각 분석에서 제외하였다. 따라서 육상 및 해저면의 초기 DEM을 정합하면 소상대와 쇄파대 영역에서 정보가 없는 상태(Nan)가 된다. 이에 본 연구에서는 원시 통합 DEM에서 소상대와 쇄파대 영역을 선형보간함으로써 연속된 DEM을 구축하였다.
3. 연구 대상 지역 및 자료 수집
기술의 적용, 검증 및 분석을 위해 2022년 10월 30일부터 11월 1일까지 경상북도 영덕군에 위치한 장사해수욕장에서 현장관측을 수행했다. 장사해수욕장은 해안선 길이가 1.451 km, 해빈폭은 19~56 m의 동쪽으로 개방된 해변이다. 하상토는 약 98%가 모래질로 이루어져 있으며, 중간입도는 0.49 mm이다.
UAV 영상 촬영에는 Hasselblad L1D-20c 카메라가 장착된 DJI 사의 Mavic 2 Pro 기체가 이용되었다. UAV 영상은 한 기종의 기체만을 사용했으며, 본 연구에서 활용되는 두 지형 계측 알고리즘은 서로 다른 작동 원리를 바탕으로 하기 때문에 SfM-MVS와 DIA 적용 시 각각 다른 방식으로 촬영된 영상을 이용했다.
해빈 UAV 측량을 위해 200 m 고도에서 2차원 그리드 공간 스캔을 수행했다. UAV 배터리 문제로 인해 장사 해수욕장 영역을 3개의 영역으로 나누어 반복 촬영해 총 738장의 영상을 분석에 이용했다.
DIA 적용을 위해서는 고정된 위치에서의 파랑장 영상의 시계열 자료를 확보하였다. 방위각(Azimuth angle)은 외해측으로 해안선에 수직인 방향, 기울임은 35°로 촬영하였다. 영상 프레임 크기는 3800 × 2160 픽셀이며 촬영 속도는 24 fps로 설정하였다. 대상지 전역을 포함하기 위해 총 4개의 지점에서 호버링하였으며, 각각의 영상 녹화 시간은 180초로, 지점 당 총 4320개의 파랑장 영상을 수집하였다. 이 중 해저면 측량에 이용된 영상 자료는 Kim et al. (2023)과 동일하다.
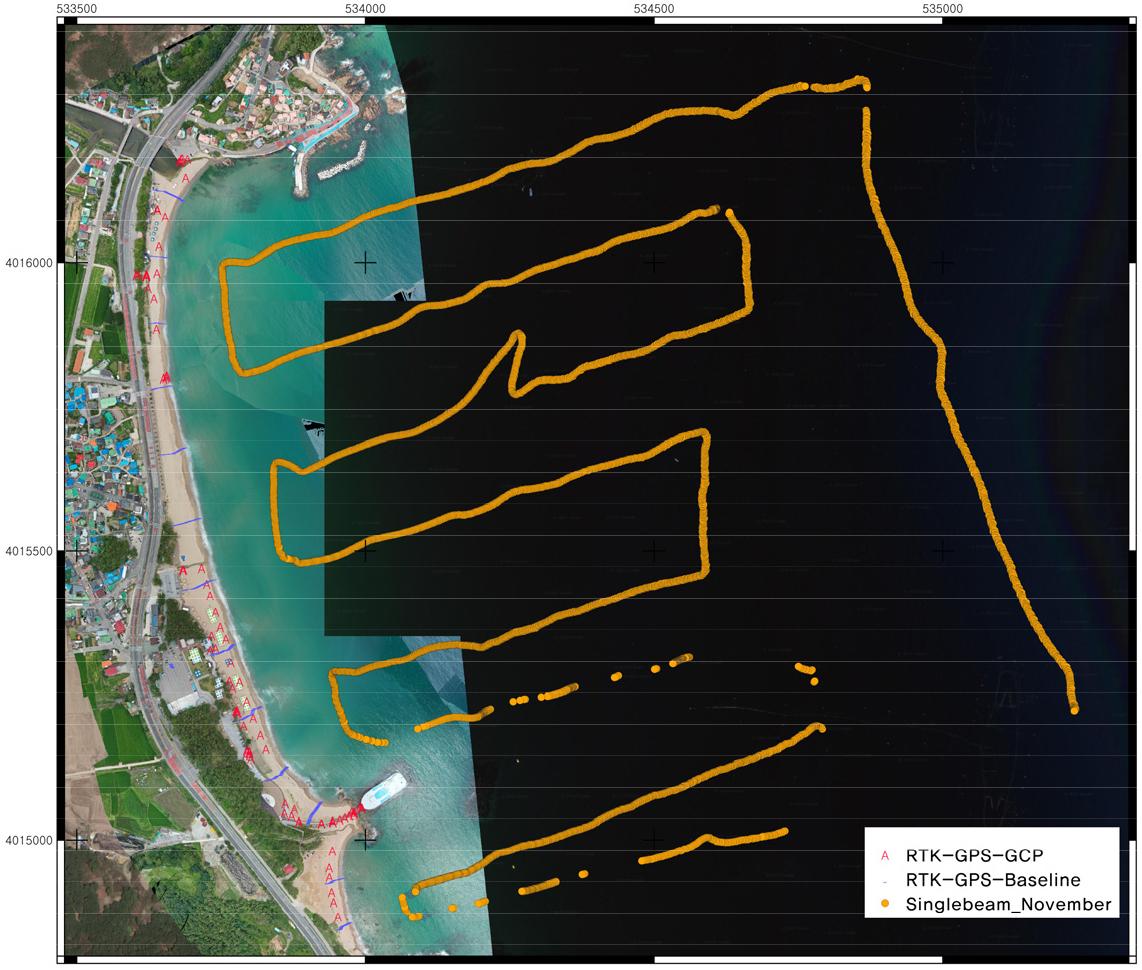
영상 자료를 대상지 지역 좌표계(UTM Zone 52N, EPSG: 32652; 및 KNGeoid18)로 재투영하기 위해 Sokkia GRX2 GPS를 이용해 총 24개 지상기준점(Ground Control Point, GCP)과 해변 데크 등의 고정 구조물을 측량했다. 추가로 11개의 육상 기선을 측량해 해빈 단면 검증에 활용했다. 수심 검증을 위해 Nortek Signature VM 500의 수심 센서로 2.047 m - 37.96 m 범위의 수심을 계측했다. Fig. 4은 본 연구에서 모형 검증에 사용된 측량 지점을 정사정합 영상 위에 도시한 것이다. 여기서, 빨간색과 파란색 표시는 RTK-GPS 지점 측량자료, 주황색 표시는 수심측량자료이다. DIA로 산정된 파랑 조건을 확인하기 위해 해수욕장 850 m 외해측에 한국해양과학기술원이 운영중인 파고계에서 계측된 30분 단위의 유의파고 및 주기 자료와 비교했다.
4. 3차원 고해상도 해안지형 생성 결과
2장에서 서술한 기법을 통해 장사해수욕장의 육상-해저 통합 DEM을 구축했다. Fig 5는 통합 DEM과 검증에 이용된 기선들을 검은색 점으로 표시한 것이다. DEM의 공간 해상도는 20 cm로 설정하였으며 모형 검증 시 DEM에서 실측 좌표로 보간된 표고를 이용했다.
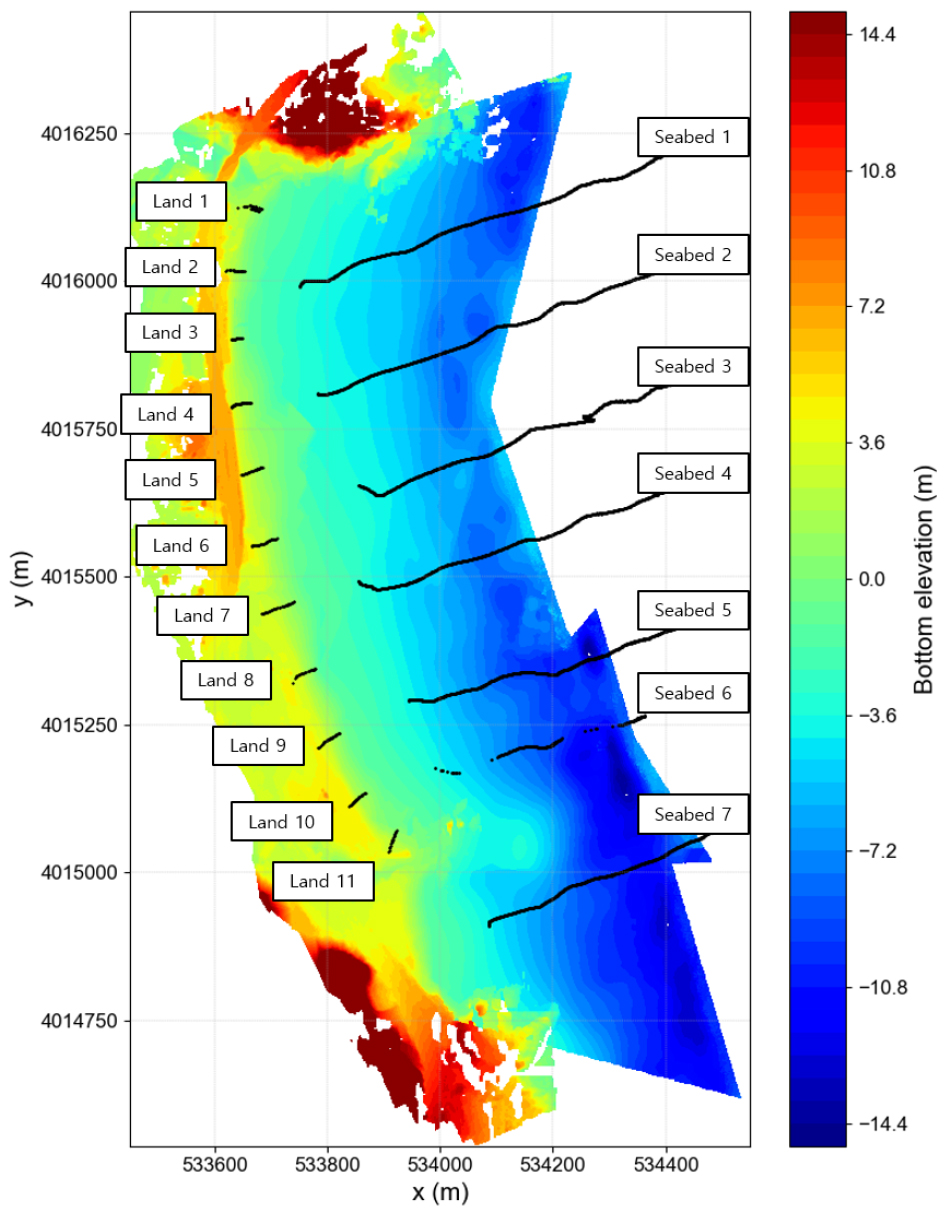
지형 맵핑 결과 해빈에서부터 해저면까지 외해 방향으로 수심이 감소하는 경향이 잘 드러났으며 내삽된 소상대 및 쇄파대 영역은 육상과 해저면을 잘 연결하고 있는 것을 볼 수 있다. 특히 해수욕장 남쪽의 선박 형태의 전승기념관의 동쪽에 암초로 인한 지형 상승이 DEM에서도 발견되었다. 외해 가장자리 부분에서 표고가 다소 상승하는 것을 볼 수 있는데 이는 LSPIV 알고리즘에 내재된 오류인 것으로 알려져 있다(Kim et al., 2023).
해안 지형 측량 기법의 적용성을 검토하기 위해 DEM으로 산정된 지형과 센서로 실측된 지형을 Fig. 6에 도시했다. 아울러 평균편차(BIAS)와 평균절대오차(mean absolute error, MAE)를 평가했으며 각 지표의 계산 방법은 아래와 같다.
여기서, 와 는 각각 DEM과 RTK로 계측된 번째 지점의 표고; 는 표본의 평균 RTK 계측 표고이다. BIAS는 DEM이 실제 자료에 비해 얼마나 편향되는지, 과대 혹은 과소평가하는지에 대한 지표이고, MAE는 모델의 평균 계측 정확도를 평가한 것이다. 실측 육상 기선은 DEM에서 내삽된 소상대 영역이 일부 포함되어 있으며, 수심 관측 기선은 UAV 관측 영역 보다 외해측을 포함한다. 따라서 육상 기선은 내삽된 모든 영역에 대해 비교하고, 해저 지형은 Kim et al. (2023)에서 권장하는 바와 같이 신뢰도가 낮은 가장자리 부분을 분석에서 제외했다.
전체 값을 대상으로 계산한 BIAS는 0.82 m로, Fig.6에서 보이는 바와 같이 계측 오차는 표고가 낮아질수록 증가하였다. 특히 DEM이 실제보다 표고를 평균 68 cm 과대평가하였고 수심이 깊어질수록 편차가 컸다. 육상과 해저면을 별도로 평가했을 때 각각 해빈과 해저면의 편차는 0.086 m, 0.72 m로 계산되었다.
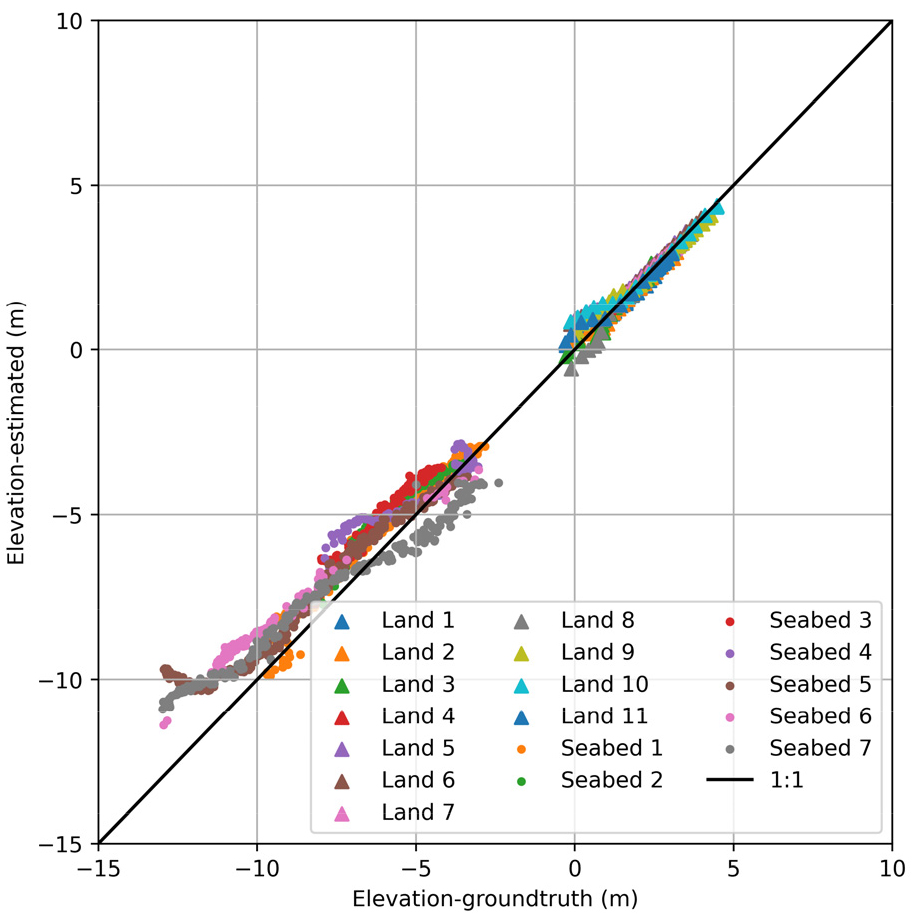
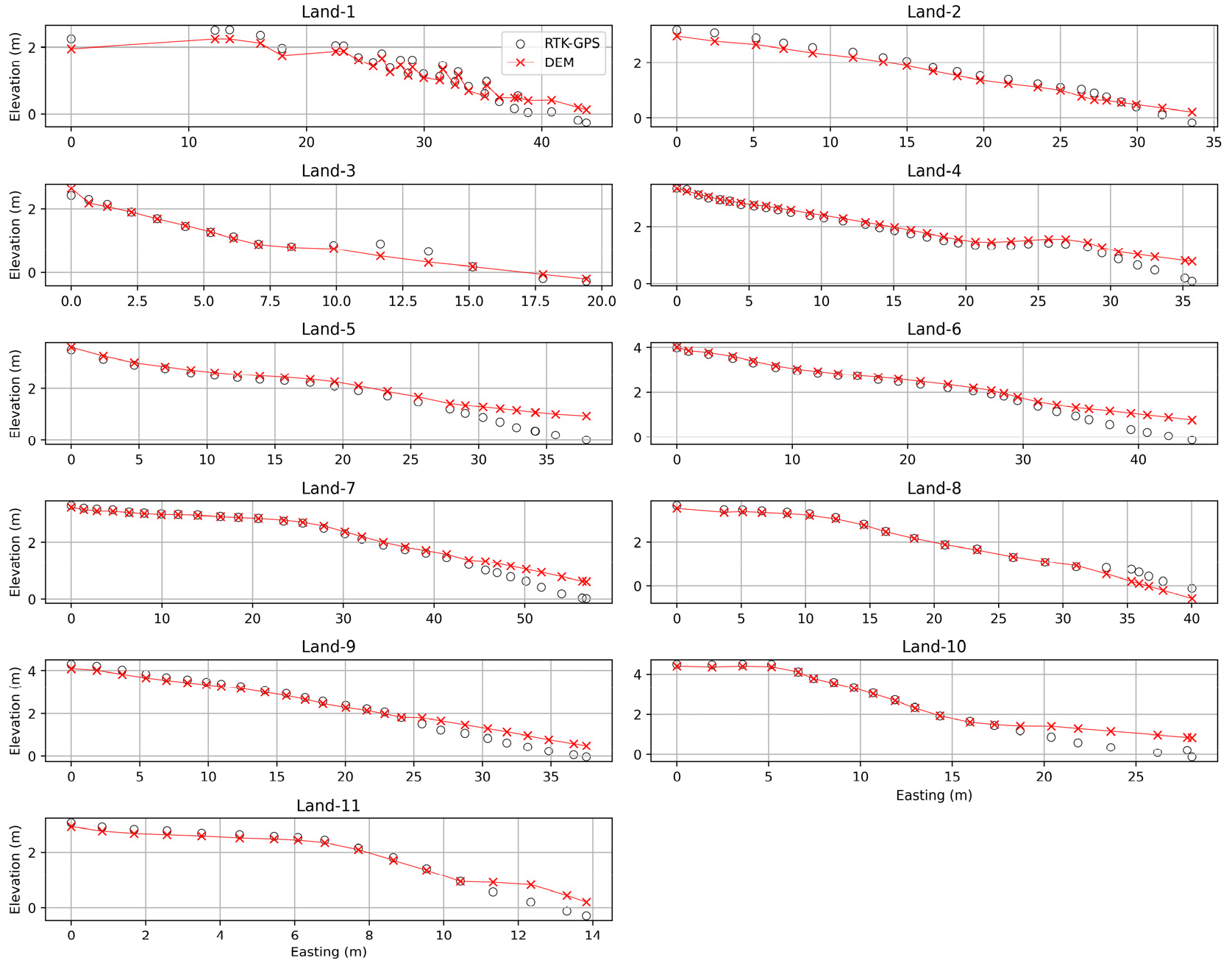
Fig. 7은 해빈 단면도의 실측 표고와 예측 표고를 서쪽에서 동쪽으로 각각 검은 동그라미와 빨간 선으로 표시한 것이다. 주목할만한 점은, 1번 기선에서 나타난 지형의 기복이나 4번 기선의 모래턱과 같은 지형 특성이 재구축되었다는 것이다. 특히, 1, 3, 11번 기선에서는 BIAS가 5 cm 이하 로 나타났다. 5, 6번 기선에서는 BIAS와 MAE 모두 25 cm 이상의 BIAS를 보였다.
Fig 7에서 드러난 바와 같이 소상내 내삽 영역인 표고 1.5 m를 경계로 이보다 높은 지역의 정확도가 더욱 높게 나타났다. 내삽된 소상대 영역은 DEM이 평균적으로 27 cm만큼 지형을 높게 추정하였다. 반면 SfM-MVS로만 구현된 처오름 영향이 없는 지역은 BIAS=2.4 cm, MAE = 9.96 cm로 내삽지역보다 10배 이상 정확하게 지형이 추정되었다. 이는 소상대 지형 처리 기술이 개선될 시 지형 측량 성능이 향상될 수 있음을 시사한다.
해저지형만 보았을 때 외해로 갈수록 수심이 깊어지는 양상과 조사 영역 북측에 위치한 방파제 및 남쪽 끝에 위치한 잠제 인근의 표고 상승이 관찰되었다. DIA 기술의 편차는 약 12 m 보다 수심이 깊은 영역에서 증가하였다. 이보다 수심이 더 깊어지면 심해파 특성이 강해져 선형 분산관계식을 이용한 수심 산정에 오차가 발생할 수 있다. 또한, LSPIV 분석 시 영상의 가장자리에서 윈도우 내에 포함되는 파봉 패턴의 수가 적어져 발생하는 오차로 인해, 영상간의 조사 영역이 중복되는 부분에서 급격한 지형변화를 보였다.
또한 호버링 영상 좌표 보정방식 또한 오차 발생에 기여한다. 좌표 보정을 위한 지상기준점이 육상에만 설치되어 외해측으로 갈수록 좌표 보정 오차가 선형적으로 증가할 수 있다.
5. 결 론
본 연구에서는 해안 지형 측량의 효율성을 높이기 위해 한 대의 UAV만을 이용해 육상-해저면 통합 DEM을 구축할 수 있는 방법을 제시한다. 이 방법은 SfM-MVS를 이용한 육상 측량 기법과 Kim et al. (2023)이 개발한 수심 역산 알고리즘을 바탕으로 한다. 육상과 해저의 DEM이 각각 구축되면, 두 DEM을 정합하고 쇄파대와 소상대 영역을 내삽하는 과정을 포함한다.
새로 제안되는 UAV 지형 측량 기법을 영덕에 위치한 장사 해수욕장에 적용하였다. 모형 검증을 위해 RTK-GPS를 이용한 해빈 단면 측량과 수심센서를 이용한 수심측량을 수행하고 DEM의 정확도를 검토했다. 정확도 확인 결과 MAE=81.8 cm의 정확도로 해안 지형을 재구축할 수 있었다. 특히 소상대를 제외한 육상지역은 2.4 cm의 편차가 나타났다. 소상대 지역이나 관측 가장자리 영역인 외해로 갈수록 오차가 커지는 양상을 보였다.
본 연구에서는 SfM-MVS 기술과 Kim et al. (2023)의 DIA를 병렬적으로 적용하였기 때문에 모형의 정확도는 각 요소기술의 정확도에 의존한다. 따라서 각 요소 기술의 정확도, 쇄파대 미계측 영역 보강 방법, 육상-해저 정합 방법 등을 개선하기 위한 추가 연구가 이루어진다면 지형 격자의 품질을 개선할수 있을 것으로 판단된다. 후속 연구에서는, 영상자료 처리 기술, 파랑 매개변수 계측 기술, 파의 비선형성 등을 고려한 선형 분산관계식의 타당성과 같이 DIA의 오차를 야기할 수 있는 요인의 영향을 규명하여 개선방안을 제시할 필요가 있다.
단일 UAV를 이용한 해안지형 측량 기법은 인력과 비용이 많이 드는 기존 접촉식 지형 계측 방법과 비교해 장비와 인력을 최소화할 수 있다는 장점이 있다. 특히, 본 UAV 지형 측량 기술이 가지는 이점은 다음과 같다: (1) RTK-GPS 계측 지점을 지상기준점 개수만큼으로 최소화할 수 있음; (2) UAV 한 대만으로도 육상과 해저지형을 모두 취득 가능함; (3) 관측 시간이 짧음; (4) 계측이 어려운 쇄파대 및 소상대를 포함한 고해상도의 연속된 지형 격자 구축이 가능함. 한편, 지형 변화의 시간 스케일이 단일 UAV 영상 촬영 시간보다 작은 경우에는 2대 이상의 UAV를 동시에 활용하여 영상 간 시간 차이를 줄일 수 있으나, 이는 장비와 인력이 그만큼 더 든다는 단점이 있다. 추후 단일 UAV를 이용한 지형 측량을 주기적으로 수행하면 해안지역의 침퇴적 양상 모니터링의 시공간적 해상도를 효과적으로 높일 수 있을 것으로 기대된다.
