

1. 서 론
2. 이론적 배경 및 방법론
2.1 이중편파 레이더 강우추정 관계식
2.2 G/R비
2.3 칼만필터
2.4 듀얼칼만필터
2.5 듀얼칼만필터에 대한 상태-공간 모형 구축
3. 자 료
4. 적용 결과
4.1 G/R비에 대한 시계열 모형 구축
4.2 듀얼칼만필터를 이용한 G/R비의 실시간 예측
5. 결 론
1. 서 론
이중편파 레이더는 수직 및 수평으로 편파된 전자기파를 송수신함으로써 대기수상체에 대한 정보를 얻는다(Goddard et al., 1982; Keenan et al., 1998; Zrnic and Ryzhkov, 1999). 대기수상체의 크기, 모양, 밀도, 분포 등 다양한 정보를 획득할 수 있으며, 이를 통해 대기수상체의 분류 및 강수량의 정량적 추정이 가능하다. 또한, 물리과정의 변화에 의한 우적크기분포(Drop Size Distribution, DSD)를 알 수 있어 레이더 강우추정의 정확도가 높다고 알려져 있다(Ryzhkov et al., 2005b). 강우추정에 이용되는 이중편파 레이더의 관측변수로는 수직 반사도(vertical reflectivity), 수평 반사도(horizontal reflectivity), 차등반사도(differential reflectivity), 차등위상차(differential phase), 비차등위상차(specific differential phase), 상관계수(correlation coefficient) 등이 있다. 그리고 이 변수들과 강우강도간의 관계를 수식화하여 강우를 추정할 수 있는 다양한 형태의 경험식이 개발된 바 있다(Jameson, 1991; Ryzhkov and Zrnic, 1995; Sachidananda and Zrnic, 1987; Cifelli et al., 2011).
이중편파 레이더를 이용함으로써 더욱 정확한 강우추정이 가능해졌다고는 하지만 그래도 어느 정도의 편의는 존재한다. 이러한 편의의 발생 원인으로는 레이더 변수 관측시 발생하는 오차와 강우추정 알고리즘의 불확실성 등을 꼽을 수 있다(Kim et al., 2016). 첫 번째 원인인 레이더 관측오차는 빔 차폐, 지형 클러터, 채프, 그리고 이상전파에코와 같은 비기상에코에 의해 유발될 수 있다. 이뿐만 아니라 레이더 하드웨어의 불안정, 신호처리 기법의 차이, 레이더 시스템 내의 전파 손실 등 레이더 시스템 자체의 문제로부터 발생하기도 한다(Park and Lee, 2010). 특히, 수평반사도와 차등반사도는 레이더의 송수신 강도에 민감하다. 따라서 송신기의 출력, 수신 강도, 하드웨어에서의 감쇠, 안테나 이득 등으로부터 발생하는 관측오차에 따라 강우 추정의 정확도가 달라질 수 있다(Villarini and Krajewski, 2010; Lee et al., 2012; Sebastianelli et al., 2013). 두 번째 원인은 이중편파 레이더 강우추정 알고리즘의 불확실성이다. 현재까지 많은 연구에서 우적크기분포와 강우입자 모형에 대한 실험 및 관측을 통해 이중편파 레이더 강우추정 알고리즘을 제시한 바 있다(Chandrasekar et al., 1990; Gorgucci et al., 1994; Bringi and Chandrasekar, 2001; Cifelli et al., 2011). 그러나 각 알고리즘이 개발된 배경과 조건이 다르기 때문에 적절치 못한 알고리즘의 적용은 강우추정의 불확실성을 유발하게 된다.
이중편파 레이더 강우가 편의를 가진다는 점과 이에 대한 보정의 필요성은 이미 많은 연구에서 확인된 바 있다. Gorgucci et al. (2006)은 X-band 이중편파 레이더 관측변수 중 수평반사도와 차등반사도를 이용한 강우추정 알고리즘을 적용한 결과, 추정된 레이더 강우는 감쇠현상에 의해 편의를 포함하기 마련이며, 이러한 경향은 S-band 레이더보다 C-band, X-band 레이더의 경우가 더 크다는 점을 확인하였다. Marks et al. (2011)은 S-band 이중편파 레이더 관측변수들에 대한 품질 평가를 통해 레이더 강우의 편의를 줄이기 위해서는 차등반사도의 관측오차가 최소화되어야 한다는 점을 강조하였다. Ryzhkov et al. (2005b)과 Cifelli and Chandrasekar (2010)에서도 이중편파 레이더 강우의 편의가 차등반사도의 관측오차에 의해 좌우될 수 있음을 밝혔다. Noh et al. (2019)도 비슬산 강우레이더의 관측자료로 강우 추정을 수행한 결과, 이중편파 레이더 변수를 이용한 강우추정 결과는 단일편파 레이더 변수를 이용하여 추정한 강우에 비해 평균적인 편의는 작지만, 편의에 대한 분산은 크게 나타남을 확인하였다. Yoon et al. (2016)은 기상청, 국토교통부, 국방부에서 운영하는 이중편파 레이더의 강우추정 결과와 지상 강우를 비교한 결과, 단일편파 레이더 알고리즘을 적용한 경우에 비해서는 편의가 작았지만, 여전히 지상 강우에 비해 과소추정됨을 확인하였다.
이중편파 레이더 강우의 편의보정을 위해 여러 기법들이 제안된 바 있다. 이 기법들은 주로 반사도의 관측오차를 줄임으로써 강우추정의 정확도를 높이는 데 중점을 두고 있다. 가장 널리 사용되는 방법은 레이더 변수 관측 자료의 자기일관성(self-consistency)을 이용하여 관측 부피와 높이의 차이에서 발생할 수 있는 오차를 줄이는 방법이다(Ryzhkov et al., 2005a; Kwon et al., 2015). 또 다른 방법으로는 강우의 수직 단면 정보를 이용하여 관측오차를 줄이는 VRP (Vertical Rainfall Profile) correction 기법이 있다(Anagnostou et al., 2010). 2차원 영상우적계 혹은 PARSIVEL (PARticle SIze VELocity) 우적계 등으로부터 획득한 관측 자료를 이용하여 이중편파 레이더 변수의 관측오차를 계산한 후, 이를 보정하여 강우 추정의 개선 효과를 확인한 사례도 있다(Kim et al., 2014; Kim et al., 2016; You et al., 2016). 강우 추정이 이루어진 이후에는 MFBC (Mean Field Bias Correction), LGC (Local Gauge Correction), PMM (Probability Matching Method), WPMM (Weighted Probability Matching Method), WR (Weighted Regression), WMR (Weighted Multiple Regression) 등과 같은 편의보정기법이 적용될 수 있으나, 단일편파 레이더 자료에 적용된 사례가 대부분이다(Rosenfeld et al., 1993; Rosenfeld et al., 1994; Seo and Breidenbach, 2002; Morin and Gabella, 2007; Thorndahl et al., 2014; Lee et al., 2015; Kim et al., 2018).
레이더 강우의 편의보정은 실시간으로 수행될 수 있다. 실시간으로 추정된 보정계수를 레이더 강우에 적용하는 형태로 편의보정이 이루어진다. Seo et al. (1999)은 process model과 operation model을 결합한 간소화 된 칼만필터 기법을 구축하였다. 실시간으로 보정계수를 예측하고 이를 Weather Surveillance Radar-1988 Doppler version(WSR-88D) 관측자료에 적용한 결과, 편의보정된 강우의 품질이 개선되는 것을 확인하였다. Seo and Breidenbach (2002)는 Seo et al. (1999)의 방법론에서 강우의 공간적 불균일성을 고려할 수 있도록 공분산 구조를 변형시켜 적용함으로써 기존 결과에 비해 더 나은 편의보정 효과가 나타남을 확인하였다. Dinku et al. (2002)은 Markov Chain model로 보정계수에 대한 예측을 수행하여 레이더 추정강우의 편의를 실시간으로 보정하였다. Anagnostou and Morales (2002)는 칼만필터 기법을 이용하여 보정계수를 예측하였다. Chumchean et al. (2006) 또한 1시간 누적 강우에 칼만필터 기법을 적용하여 실시간 편의보정에 칼만필터의 효용성이 뛰어남을 확인하였다. 그러나 이들 연구의 대부분은 보정계수가 매개변수가 고정된 AR(1) 모형을 따른다는 가정에 근거하고 있다. 호우사상에 따라, 또는 동일한 호우사상에서도 강우강도의 변화에 따른 시계열 모형 계수의 변화를 고려하지 못한다. 이러한 문제는 강우강도가 급격히 변하는 복합 호우사상의 경우, 칼만필터 적용 결과에 큰 불확실성을 야기하게 된다.
본 연구에서는 이러한 문제의 해결 방안으로 듀얼칼만필터 기법을 이용하여 이중편파 레이더 강우의 실시간 편의보정을 수행하고자 한다. 듀얼칼만필터는 기존의 칼만필터와 달리 두 개의 시스템(상태추정시스템, 모형추정시스템)이 동시에 가동되면서 실시간으로 보정계수가 예측된다. 상태추정시스템은 기존의 칼만필터와 동일하며, 모형추정시스템이 지속적으로 모형의 매개변수를 갱신함으로써 상태변수의 예측에 영향을 미친다. 본 연구에서는 2016년 7월에 발생한 긴 지속시간을 가지는 호우사상에 듀얼칼만필터기법을 적용하였으며, 비슬산 이중편파 레이더 관측자료를 이용하였다.
2. 이론적 배경 및 방법론
2.1 이중편파 레이더 강우추정 관계식
레이더는 목표물에 반사되어 오는 신호를 여러 반사도 변수로 저장하는데, 이를 악기상 등에 활용하기 위해서는 강우강도(mm/hr)로 산출하는 과정이 필요하다. 흔히, 이 과정을 레이더의 정량적 강수량 추정(Quantitative Precipitation Estimation; QPE)이라고 한다. 정량적 강수량 추정과정에서는 레이더 반사도와 실제 강수량을 이용한 실험과 통계자료를 기반으로 경험적인 강수량 추정식을 만들어 사용하고 있다. 이중편파 레이더 강우추정 관계식은 정량적 강수량 추정과정에서 레이더 강우의 품질을 결정하는 중요한 요소 중 하나이다.
레이더 반사도는 강수입자에 부딪혀 되돌아오는 전파의 세기를 나타낸다. 반사도의 단위는 mm6/m3이며, 통상 Eq. (1)과 같이 dB 단위로 표현하기도 한다(Bringi and Chandrasekar, 2001).
| $$Z(dBZ)=10\;\log_{10}(Z)$$ | (1) |
여기서,
| $$Z\;=\int_DD^6N(D)\;dD$$ | (2) |
이 식에서 Z는 반사도(mm6/m3), D는 강수입자의 직경(mm), N (D) dD는 1 m3당 D에서 D + dD까지 크기의 직경(mm)을 갖는 강수입자분포를 의미한다.
본 연구에서는 레이더 관측 강우강도의 추정에 이중편파 레이더 변수인 수평반사도 Zh와 차등반사도 Zdr을 이용한 경우를 고려하였다. 이중편파 레이더 강우추정 관계식은 Eq. (3)과 같은 형태이며, 결정해야 할 매개변수로는 A, b, c가 있다.
| $$R(Z_{\mathit h}\mathit,\mathit\;Z_{\mathit d\mathit r})=A(Z_{\mathit h})\;^b\;(Z_{dr})\;^c$$ | (3) |
2.2 G/R비
본 연구에서는 보정계수로, 일정 영역 내의 지상관측강우와 레이더 강우의 비율인 G/R비를 이용하였다. 이 G/R비를 레이더 강우에 곱해주기만 하면 되는 간편성 덕분에 레이더 강우의 편의보정과 관련된 여러 연구에서 적용된 바 있다(Seo et al., 1999; Seo and Breidenbach, 2002; Kim et al., 2018). G/R비는 아래의 Eq. (4)으로 계산된다.
| $$G/R=\sum_{i=1}^nG_i/\sum_{i=1}^nR_{\mathit i}$$ | (4) |
여기서 Gi는 지상관측 강우강도(mm/hr)이며, Ri는 레이더 관측 강우강도(mm/hr)이다. n은 자료의 개수이다. G/R비가 1.0일 경우는 레이더자료와 지상 관측강우자료 간에 편의가 없다는 것을 의미하며, 0.0~1.0의 범위를 가질 경우는 레이더 강우가 지상 강우에 비해 과대 추정되었다는 것을 의미한다. 이와 반대로 G/R비가 1.0 이상일 경우 레이더 강우 추정치가 지상 강우자료에 비해 과소 추정되었음을 나타낸다. 일반적인 레이더 강우 추정치는 과소 추정되는 경향이 크기 때문에 G/R비는 1.0이상의 값을 가지게 된다.
2.3 칼만필터
칼만필터는 다양한 실시간 예측 문제에 적용할 수 있는 필터링 기법 중 하나이다(Kalman, 1960). 무작위 변동을 포함하는 동적 시스템의 상태변수를 최적화하는 과정이라고도 볼 수 있다. 칼만필터는 선형성을 가정으로 하며, 추정치의 편의가 없고 오차를 최소화한다는 조건하에 미지의 상태변수를 추정하는 과정이다. 가장 중요한 특징 중 하나는 반복적인 필터링 과정을 통해 실시간으로 상태변수의 최적 해를 추정할 수 있다는 점이다. 이 기법은 다양한 범위의 연구 분야에 적용된 바 있으며, 수문 및 수자원 분야에서는 실시간 자료 보정 및 예측에 활용되었다(Ahnert et al., 1986; Lee and Singh, 1998; Yoo et al., 2011; Kim and Yoo, 2014).
칼만필터는 시스템방정식과 관측방정식으로 구성되는 선형 상태-공간 모형에 적용될 수 있다(Box et al., 2015). 시스템방정식은 현재 시점의 상태변수가 이전 시점의 상태변수와 얼마나 선형적으로 관계되어 있는지를 나타낸다. 즉, 이 식에는 평균이 0이고, 상황에 따라 결정되는 분산의 정규분포를 따르는 오차항도 포함된다(Gelb, 1974). 입력이 따로 고려되지 않는 시스템의 시스템방정식은 다음과 같이 나타낼 수 있다.
| $$x(t)=\phi(t)\;x(t-1)\;+\;w(t),\;w(t)\;\sim\;N(0,\;Q)$$ | (5) |
여기서, t는 현재 시점, t-1은 이전 시점을 각각 나타내며, 는 t시점의 상태변수이다. 는 t-1 시점의 상태변수를 t시점의 상태변수로 전이시키는 상태 전이행렬이다. 는 상태변수의 불확실성에 의해 야기되는 상태변수의 오차로서 일반적으로 평균이 0이고, 공분산이 Q인 정규분포를 따른다고 가정된다.
칼만필터가 적용되는 대부분의 문제에서 상태변수의 참값을 얻기는 매우 어렵다. 따라서 관측방정식을 통해 관측치를 상태변수와 연관시키는 과정이 필요하다. 통상적으로 관측방정식은 상태변수와 오차항의 선형 결합의 형태로 나타난다(Kalman, 1960; Gelb, 1974).
| $$y(t)=H(t)\;x(t)\;+\;v(t),\;v(t)\;\sim\;N(0,\;S)$$ | (6) |
여기서, 는 관측치이며, 은 관측오차로서 평균이 0이고 공분산이 S인 정규분포로 가정된다. H(t)는 상태변수 를 관측치 로 전이시키는 관측 전이행렬이다. 상태변수와 관측치의 편의가 없다고 가정될 경우에 H(t)는 단위행렬 I로 나타낼 수 있다. 또한, 시스템방정식과 관측방정식의 오차항 와 는 서로 독립이다.
칼만필터 기법의 기본 원리는 예측치(혹은 모의치)와 관측치가 가지고 있는 오차 정보를 이용하여 상태변수를 추정하는 데 있다. 즉, 관측치가 실시간으로 수집될 경우, 상태변수는 예측치와 관측치의 불확실성 규모를 비교함으로써 갱신된다. 그리고 갱신된 값은 다음 시점의 예측치를 산정하는 초기값이 된다(Gelb, 1974; Lin and Krajewski, 1989; Bae et al., 2009). 예측치와 관측치의 불확실성 규모는 시스템오차 공분산 Q와 관측오차 공분산 S에 의해 결정된다.
상태-공간 모형은 관측치에 대한 시계열 모형을 기반으로 유도된다. 시스템오차 공분산과 관측오차 공분산 또한 시계열 모형을 통해 산정될 수 있다. 시계열 모형의 구조, 잔차 분산을 포함하는 모형의 매개변수는 상태-공간 모형의 오차 공분산에 영향을 미친다. 유도된 상태-공간 모형은 칼만필터의 적용에 직접적으로 이용된다.
칼만필터 알고리즘은 크게 다섯 단계로 구성된다(Table 1). 상태변수의 예측, 예측치의 오차 공분산 갱신, 칼만이득(Kalman gain) 계산, 상태변수의 최적해 추정, 그리고 최적해의 오차 공분산 갱신 과정이 반복되면서 칼만필터링이 진행된다(Kalman, 1960; Gelb, 1974).
칼만필터에서는 Kalman gain이 중요한 역할을 한다. Table 1에서 제시된 바와 같이 Kalman gain K(t)는 상태예측오차의 공분산 P-(t)와 관측오차 의 공분산 S의 변화와 연관되어 있다. 즉, Kalman gain은 동적 상태-공간 모형의 예측치와 관측치의 영향력을 결정하는 가중치로서 자료동화 결과에 큰 영향을 미친다. 그리고 상태예측오차의 공분산 P-(t)는 시스템오차 의 공분산 Q에 의해 규모가 결정된다. 상대적으로 큰 시스템오차의 공분산 Q는 시스템에 작용하는 오차의 정도가 큼을 의미하며, 상태예측오차의 공분산 P-(t)를 증가시켜 결국, Kalman gain이 1.0에 가까운 수치로 도출되도록 작용한다. 이와 반대로 관측오차의 공분산 S는 관측치에 대한 오차의 정도를 의미하며, S가 Q보다 상대적으로 큰 경우 관측치의 불확실성 정도가 예측치의 불확실성보다 큼을 의미한다. 따라서 이러한 경우 Kalman gain은 0.0에 가까운 수치로 도출되게 된다. 칼만필터와 관련된 자세한 내용은 Kalman (1960), Gelb (1974), Box et al. (2015)에서 확인할 수 있다.
Table 1. Algorithm and equations of the Kalman filter
| Steps of the algorithm | Equation |
| State estimate prediction | |
| State estimate error covariance prediction | |
| Kalman gain | |
| State estimate update | |
| State estimate error covariance update |
2.4 듀얼칼만필터
듀얼칼만필터는 기존의 칼만필터와 달리 상태변수와 모형 매개변수를 동시에 추정하는 시스템이다. 듀얼칼만필터는 상태추정시스템과 모형추정시스템으로 구성된다. 상태추정시스템은 기존의 칼만필터와 매우 유사한 과정이다. 그리고 모형추정시스템은 모형의 매개변수 추정을 위한 것이다. 즉, 듀얼칼만필터는 상태추정시스템과 모형추정시스템에 대해 모두 칼만필터링 과정을 거치는 구조로 되어있다(Wan and Nelson, 1997; Nelson, 2000; Wan et al., 2000).
듀얼칼만필터의 전체적인 과정은 Fig. 1과 같다. 상태추정시스템과 모형추정시스템은 수평적인 구조를 가진다. 먼저, 이전 시점의 상태변수 와 매개변수 은 현재 시점의 상태변수 와 모형 매개변수 의 예측에 이용된다. 이때 상태변수 에 대한 AR(1) 모형과 달리, 는 상수로 가정된다. 즉, 백색소음 항이 없는 랜덤워크 모형이다. 새로운 관측치가 수집됨과 동시에 상태변수 와 모형 매개변수 가 갱신된다. 이때 두 시스템은 동일한 상태변수 관측치를 공유하게 된다. 상태변수의 새로운 관측치가 모형의 매개변수를 갱신하는 데에도 공유된다는 점이 듀얼칼만필터의 장점이다. 이 알고리즘은 상태변수와 모형 매개변수를 실시간으로 추정할 수 있게 한다.
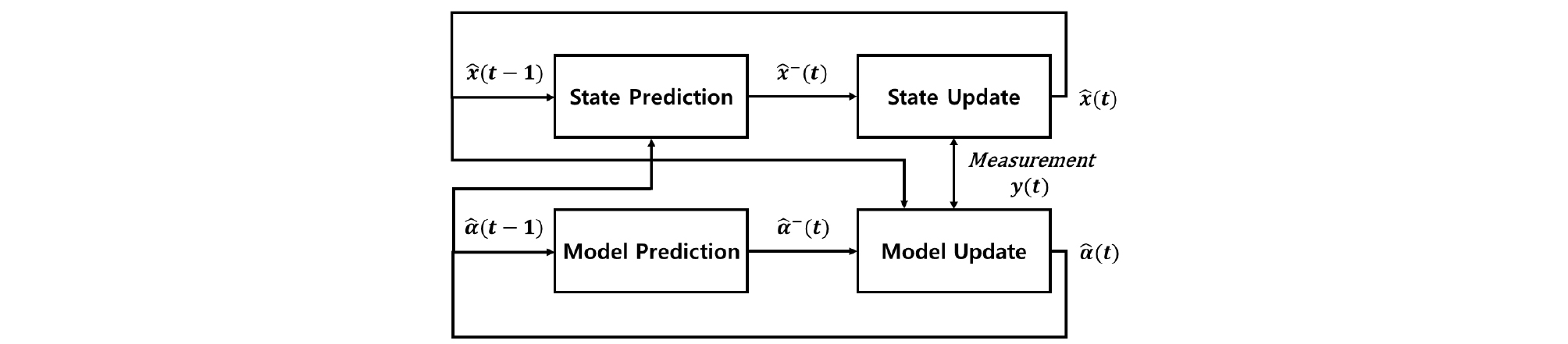
Table 2는 듀얼칼만필터 상태-공간 모형의 방정식들을 정리한 것이다. 상태추정시스템은 기존 칼만필터와 매우 유사하다. 하나 다른 점은 모형 매개변수 가 상태변수 예측 단계에서 실시간으로 갱신된다는 점이다. 시스템방정식, 관측방정식, 그리고 초기치를 설정한다는 점은 모두 기존 칼만필터와 동일하다.
Table 2. Equations of the state-space model in the dual Kalman filter
| Module | State estimation system | Model estimation system |
| System equation | ||
| Observation equation |
모형추정시스템은 모형 매개변수를 실시간으로 갱신하는 데 필요하다. 그리고 실시간으로 갱신되는 모형 매개변수는 상태추정시스템에 예측된 모형 매개변수를 제공하여 상태변수를 예측하는 데 이용된다. 모형추정시스템의 시스템방정식은 모형 매개변수가 무작위 오차를 포함하지 않는다는 가정하에 적용된다(Wan and Nelson, 1997). 따라서 상태추정 오차의 공분산과 시스템오차의 공분산은 모형추정시스템에서 고려되지 않는다. 관측방정식은 상태변수, 상태변수의 오차, 그리고 관측오차로 표현된다. 상태변수의 오차가 관측방정식에 포함된다는 점은 모형추정시스템의 또 다른 특징이다.
Table 3은 듀얼칼만필터의 모형추정시스템 방정식을 정리한 것이다. 먼저, 상태추정치 예측은 이전 시점의 추정치와 동일하다고 가정된다. 시스템방정식의 오차가 없다는 조건 하에서 상태변수의 오차 공분산 예측치는 이전 시점의 상태추정 오차 공분산 갱신치로 가정된다. 모형추정시스템의 Kalman gain은 상태추정시스템에서의 Kalman gain과 약간 다르다. 모형추정시스템의 Kalman gain 방정식의 분모에는 시스템오차 공분산과 관측오차 공분산이 모두 포함되어 있다. 즉, 모형추정시스템의 관측치가 곧 상태추정시스템의 상태추정치와 같으며, 이는 상태추정시스템의 시스템오차와 관측오차가 모두 모형추정시스템에서 고려됨을 의미한다(Wan and Nelson, 1997). 상태추정치 갱신, 상태추정치 오차 공분산 갱신 등의 과정은 상태추정시스템과 동일하게 진행된다.
Table 3. Algorithm and equations of the model estimation system in the dual Kalman filter
| Steps of the algorithm | Equation |
| State estimate prediction | |
| State estimate error covariance prediction | |
| Kalman gain | |
| State estimate update | |
| State estimate error covariance update |
2.5 듀얼칼만필터에 대한 상태-공간 모형 구축
듀얼칼만필터를 적용하려면 상태-공간 모형이 우선 구축되어야 한다. 상태-공간 모형의 구축에는 Table 2와 같이 유도된 시계열 자료에 대한 시계열 모형이 필요하다. 시계열 모형으로부터 시스템방정식과 관측방정식의 오차 분산도 결정된다. G/R비 시계열을 잘 대변하는 것으로 알려진 AR(1) 모형에 대한 시스템방정식과 관측방정식은 다음과 같이 정리된다.
| $$x(t)-\mu=\alpha(x(t-1)-\mu)+w(t),\;w(t)\;\sim\;N(0,\;Q)$$ | (7) |
| $$y(t)\;=\;Hx(t)\;+\;v(t),\;v(t)\;\sim\;N(0,\;S)$$ | (8) |
여기서 는 상태변수의 평균이고, 는 모형의 매개변수이다.
주어진 시계열 모형에 대한 상태-공간 모형의 구축은 다소 임의적이다. 다시 말해 주어진 시계열 모형을 설명할 수 있는 상태-공간 모형은 유일하지 않고 여러 형태가 될 수 있다. 본 연구에서처럼 실시간 예측 문제와 다른 목적을 가진 경우, 특정한 형태의 상태-공간 모형을 선정할 수도 있다(Hwang, 2010). 그러나 이 과정에서 상태-공간 모형이 원 시계열 모형을 만족하는지 확인할 필요가 있다. 주어진 관측방정식 Eq. (8)에서 t-1 시점에 대해 정리한 관측방정식에 1차 상관계수를 곱한 후 빼면 상태-공간 모형은 다음과 같이 쉽게 결합될 수 있다.
본 연구에서 Eq. (9)의 우항은 AR (1) 모형의 잔차와 같다.
| $$z(t)\;=\;H\omega(t)+\upsilon(t)-\left[\mu_\upsilon+\alpha\left\{\upsilon(t-1)-\mu_\upsilon\right\}\right]$$ | (10) |
시계열 모형의 잔차는 편의가 없고, 서로 독립이기 때문에 잔차의 분산은 아래와 같이 유도될 수 있다.
다시 간단히 정리하면 아래와 같다.
| $$\sigma^2=H^2Q+S+\alpha^2S=H^2Q+S(1+\alpha^2)$$ | (12) |
전이행렬 H가 단위행렬이라는 가정이 추가되면, 잔차의 분산식은 더욱 간단해진다(Yoo et al., 2011).
| $$\sigma^2=Q+S(1+\alpha^2)$$ | (13) |
여기서 은 AR(1) 모형의 잔차 분산이다. Eq. (13)은 시스템방정식과 관측방정식의 오차 분산 관계로써 재정리될 수 있다.
| $$Q=\sigma^2-S(1+\alpha^2)$$ | (14) |
| $$S=\frac{\sigma^2-Q}{(1+\alpha^2)}$$ | (15) |
Eqs. (14) and (15)와 같이 유도된 관계식을 이용하여 상태-공간 모형의 구축에 필요한 공분산을 결정할 수 있는 것은 사실이다. 그러나 공분산은 유일하게 결정되지 않을 수도 있다. 따라서 상태-공간 모형의 공분산에 대한 결정은 위 식을 만족하는 전제하에 듀얼칼만필터 사용자의 의도가 반영될 수 있도록 결정되어야 한다. 본 연구에서는 시스템방정식의 오차 분산 Q와 관측방정식의 오차 분산 S의 관계를 선형으로 가정하였다.
| $$Q=\phi S$$ | (16) |
여기서 는 시스템 및 관측방정식의 오차 분산 비율을 의미한다. 또한, 듀얼칼만필터 적용시 초기치로써 G/R비의 평균값, lag-1 자기상관계수, 잔차의 분산을 각각 1.0, 0.3, 1.0으로 설정하였다. 상태-공간 모형의 오차 분산은 Eq. (16)에 근거하여 산정된다.
3. 자 료
본 연구에서는 비슬산 강우레이더의 관측자료를 이용하였다. 비슬산 강우레이더는 2009년부터 관측을 시작한 S 밴드 레이더이다. 관측된 자료는 3년간의 테스트 기간을 거친 후, 2012년부터 공개되기 시작하였다. 우리나라의 남부지역에 위치한 해발고도 1,057 m 비슬산의 정상에 설치되어 있다. 관측반경의 경우, 비가 내리지 않는 기간에는 250 km까지 관측을 하지만 비가 내리는 경우에는 100 km로 줄어든다. 빔 폭은 0.95°이며, 최저 고도각 –0.5°에서부터 1.59°까지 관측을 수행하고 있다. 본 연구에서는 최저고도각 관측자료를 이용하였다. 시간해상도는 2.5분, 공간해상도는 125 m이다. 비슬산 강우레이더의 위치와 관측반경을 Fig. 2에 표시하였다. 지상관측강우자료로는 기상청에서 제공하는 AWS(automatic weather systems) 관측자료를 이용하였다. 비슬산 강우레이더 관측반경 내에는 총 117개의 AWS가 위치한다(Fig. 2).
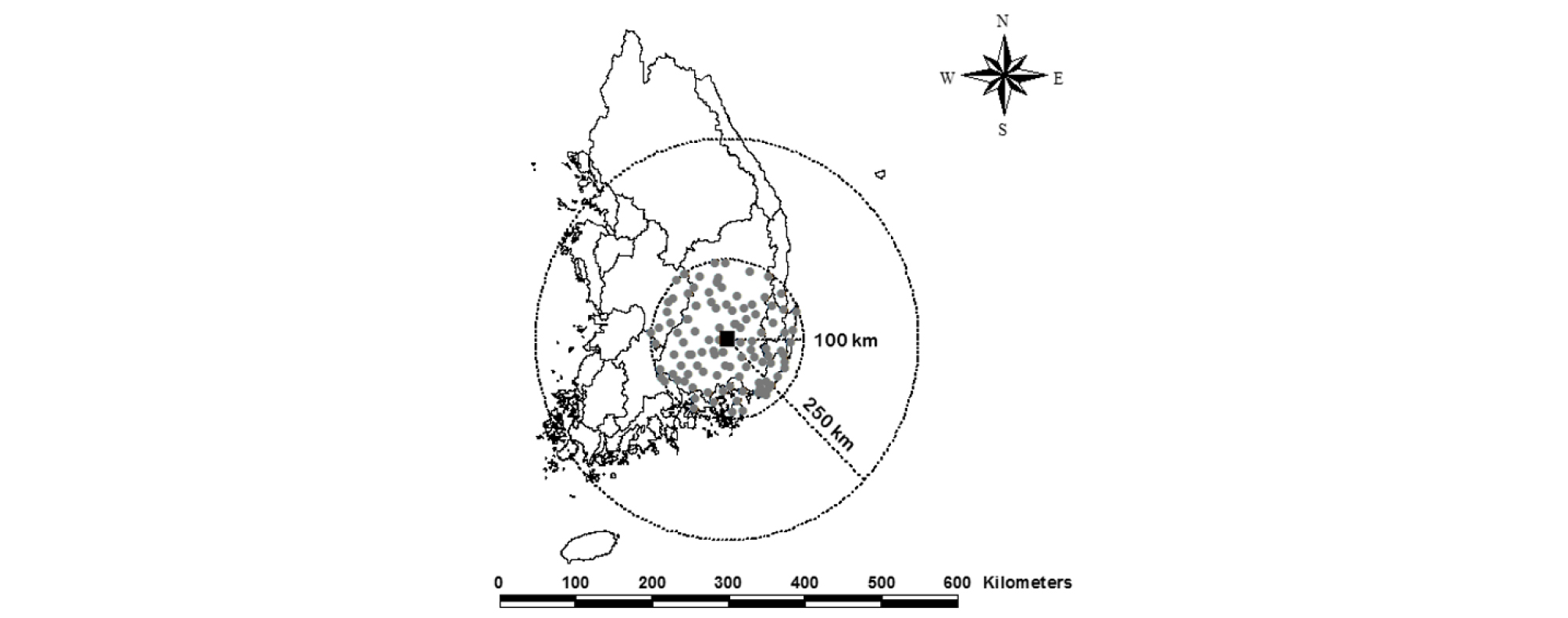
본 연구에서는 비슬산 레이더 관측반경 내에서 발생한 호우사상 중 장기간 강우가 발생한 사상을 선정하였다. 그 이유는 듀얼칼만필터를 적용하려면 충분한 길이의 시계열 자료가 확보되어야 하기 때문이다. 선정된 호우사상은 2016년 7월 1일부터 6일까지 6일 동안 발생한 사상이며, 이 중 강우가 적게 발생하거나 발생하지 않은 기간을 제외한 일부를 이용하였다. 비슬산 강우레이더 반경 내의 AWS 중 하나인 735번 AWS (덕유산 관측소)에서는 6일간 총 231.4 mm의 강우가 내렸다. 최대 강우강도는 약 30.0 mm/hr 정도이며, 7월 2일 5시경에 관측되었다(KMA, 2016). 또한, 호우사상의 초반인 7월 1일과 2일에 약 140 mm의 강우가 집중되어 발생하였다. 해당 호우사상에 대한 레이더 반사도 자료와 지상 강우자료는 모두 10분 단위이며, 듀얼칼만필터의 적용 또한 10분 단위로 설정하였다.
본 연구에서는 레이더관측 강우강도의 추정에 이중편파 레이더 변수인 수평반사도 Zh와 차등반사도 Zdr을 이용한 경우를 고려하였다. 이중편파 레이더 강우 추정에 사용한 식은 Cifelli et al. (2011)이 제시한 Eq. (17)이다. 해당 식은 Bringi and Chandrasekar (2001)의 식을 발전시킨 식으로써, 매개변수 b만 다르다.
| $$R(Z_h,\;Z_{dr})=0.0067\;(Z_h)\;^{1.24}(Z_{dr})\;^{0.45}$$ | (17) |
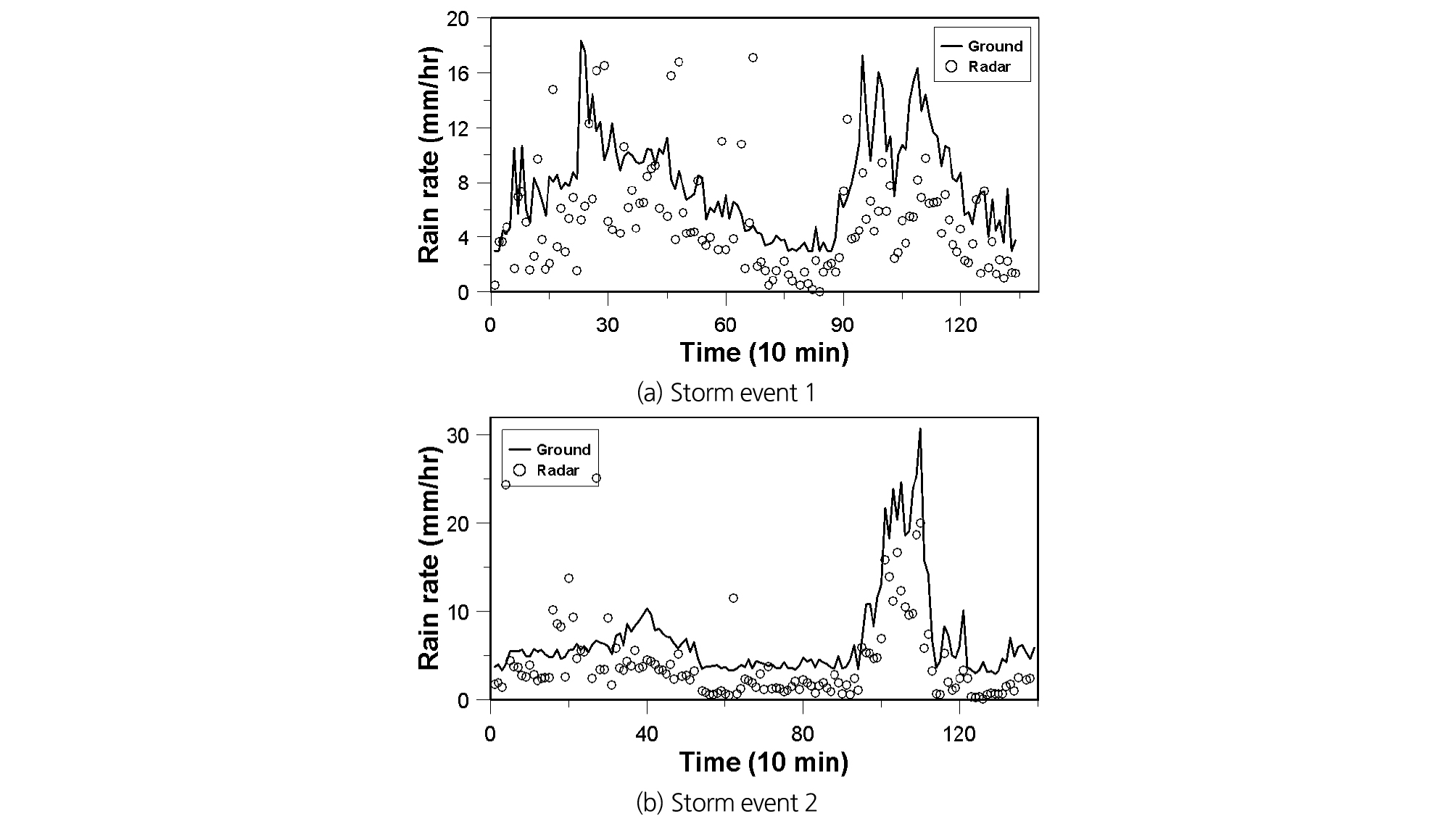
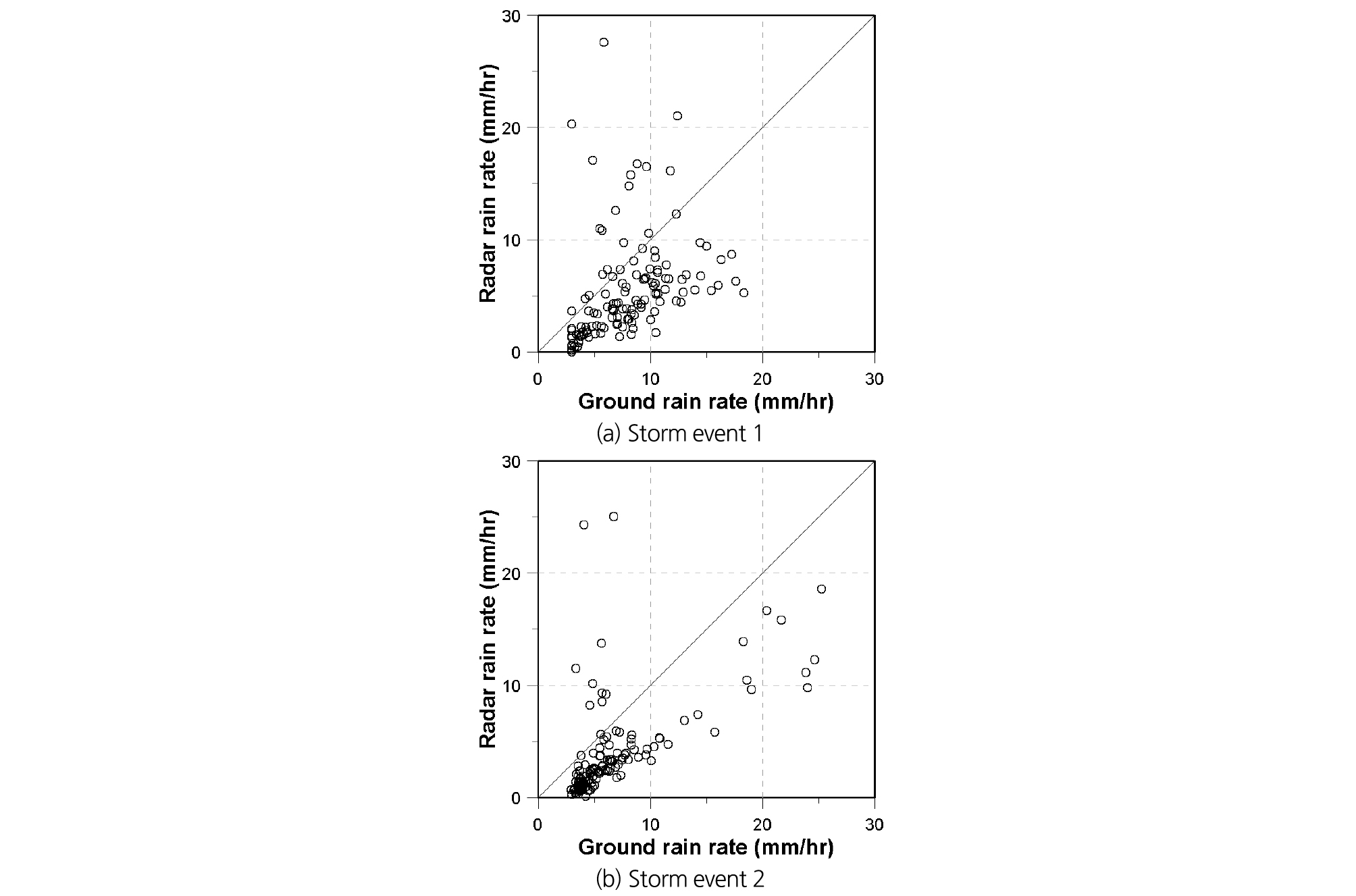
본 연구에서 이용한 지상관측 강우강도와 레이더 강우강도의 시계열은 Fig. 3과 같다. 지상관측 강우강도는 비슬산 레이더 반경 내 위치하는 117개 AWS 중 강우가 관측된 지점의 강우강도를 각 시점마다 평균하였다. 이중편파 레이더 강우강도는 해당 AWS가 위치하는 격자에 대한 반사도를 위의 Eq. (17)를 적용하여 도출된 값이다. 7월 1일부터 6일까지의 강우기간 동안 강우가 집중된 2개의 구간으로 분리하였으며, 듀얼칼만필터도 두 구간에 대해 각각 적용하였다. 지상관측 강우강도에 비해 레이더 반사도로 추정된 강우강도가 과소하게 추정되는 경향이 나타났다. 종종 레이더 강우강도가 비정상적으로 과도하게 크게 추정되는 경우가 발생하였다. 이는 지상관측 강우강도와 레이더 강우강도의 산점도에서도 확인할 수 있다(Fig. 4).
4. 적용 결과
4.1 G/R비에 대한 시계열 모형 구축
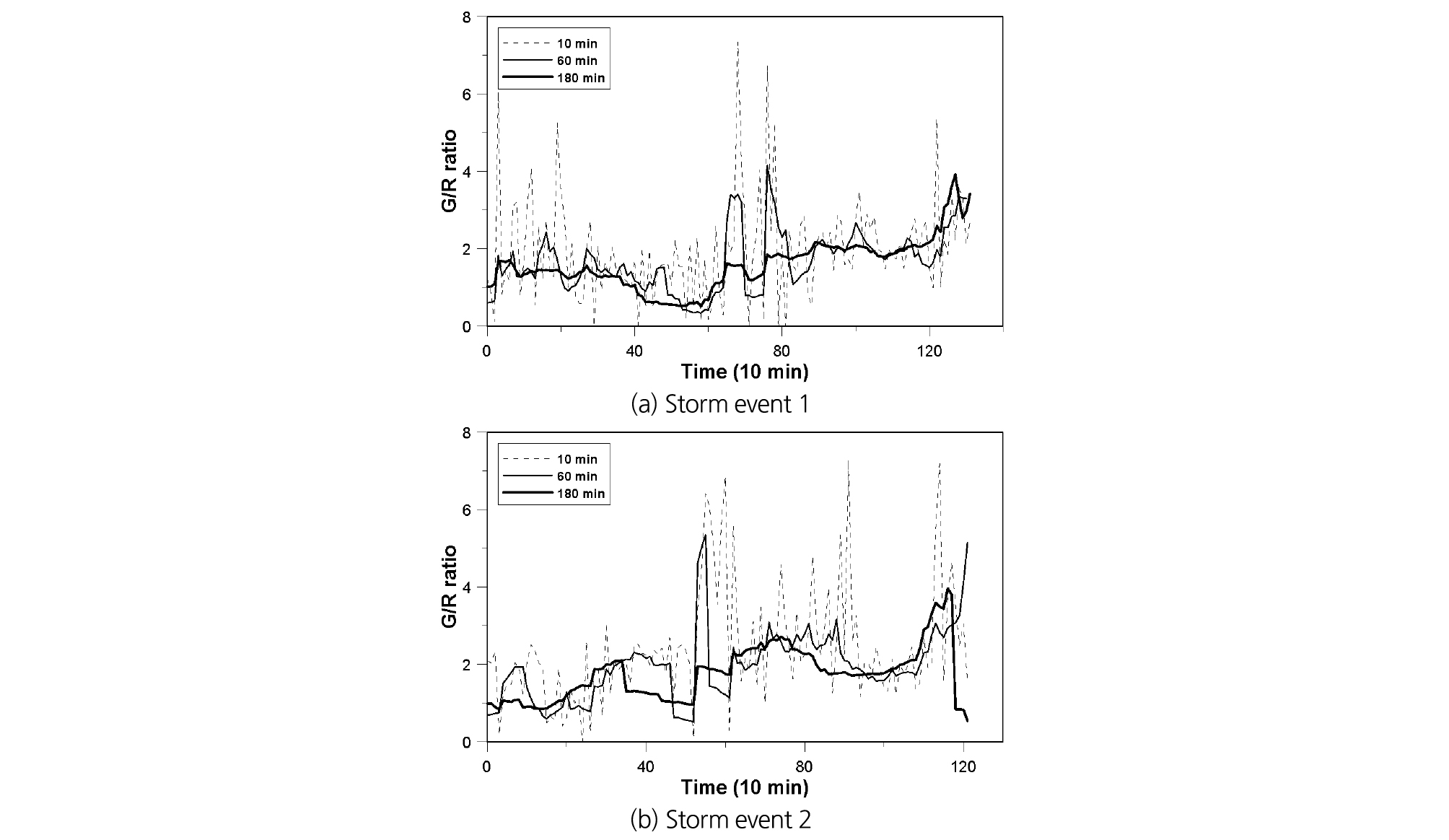
듀얼칼만필터를 적용하기에 앞서 본 연구에서는 G/R비 산정시 강우강도의 임계치와 누적시간을 고려하였다. 강우강도 임계치는 G/R비 산정에 이용되는 지상관측 및 레이더 강우강도의 최저치를 의미하며, Yoo et al. (2011)과 Kim and Yoo (2014)에서 검토한 내용을 토대로 0.5 mm/hr로 결정하였다. 누적시간은 매 시점 G/R비 산정에 이용되는 자료의 개수와 관련이 있다. 예컨대 누적시간이 60분이라면 60분 전부터 10분 전까지의 자료를 누적하여 G/R비를 산정한다. 본 연구에서는 누적시간으로 10분, 60분, 180분 세 가지를 고려하였다. 또한, 한 시점의 G/R비 산정에 지상관측 강우강도는 비슬산 강우레이더 반경 내 117개 AWS 중 강우가 관측된 지점에서의 강우강도를 평균한 값을 이용하였다. 그리고 레이더 강우강도는 동일 반경 내 AWS가 위치하는 격자의 레이더 강우강도를 평균하였다.
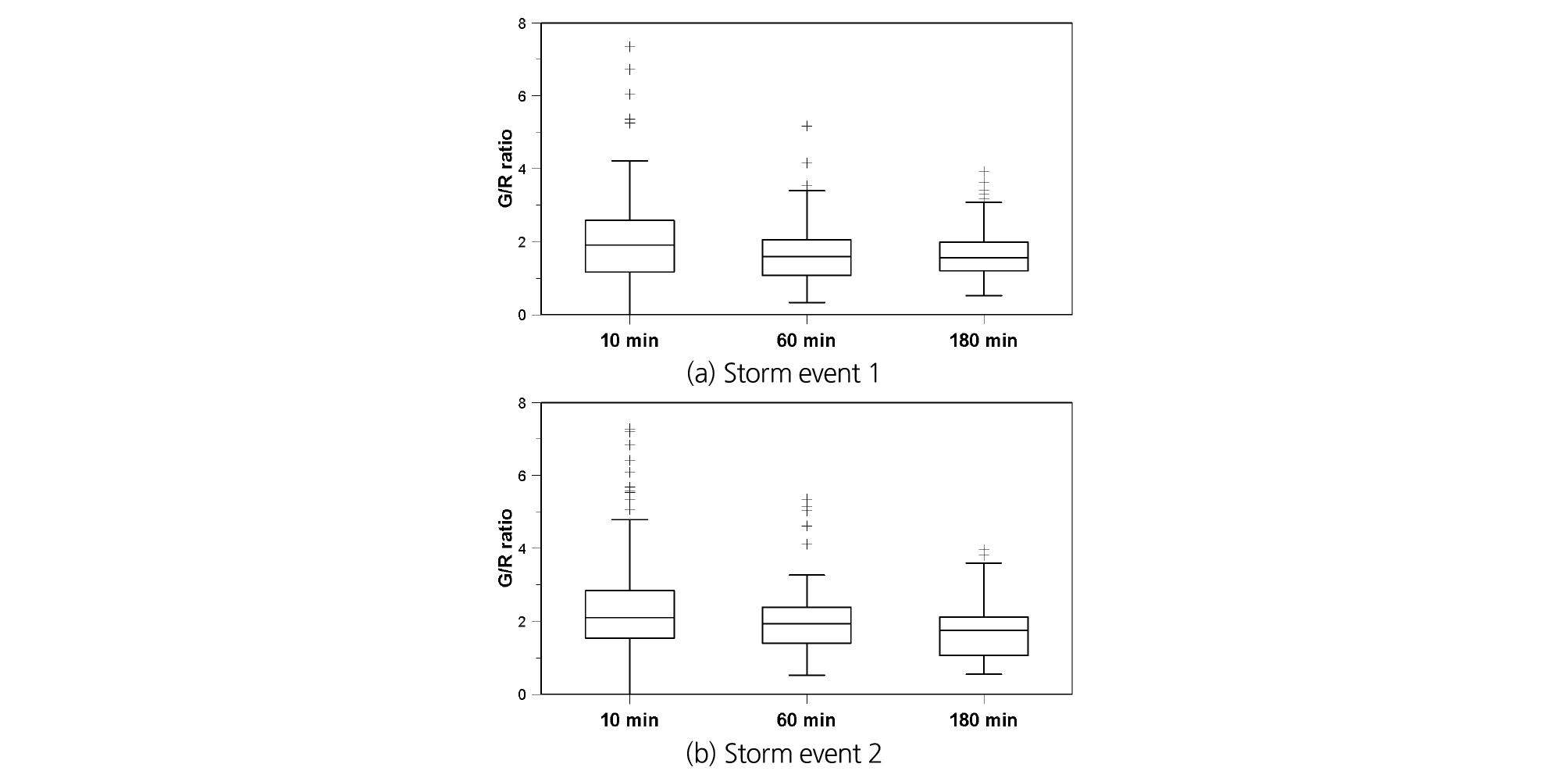
Fig. 5는 누적시간별 G/R비 산정 결과를 시계열로 나타낸 것이다. 누적시간이 짧을수록 G/R비의 변동성이 크고, 산정되는 값의 범위도 크게 나타났다. 누적시간이 10분인 경우에는 특히 G/R비의 변동이 심한데, 이는 레이더 강우강도가 매우 작게 추정되었거나, 지상관측 강우강도가 급격하게 증가하는 구간이 다른 누적시간에 비해 많기 때문이다. Fig. 6은 두 호우사상의 G/R비 산정 결과를 box-whisker plot으로 나타낸 것이다. 누적시간이 짧을수록 G/R비의 분산이 크다는 것을 알 수 있다. 또한, 몇 개의 이상치가 존재하지만, 대부분의 G/R비는 1과 2 사이의 구간에서 산정되었음을 확인할 수 있다. 즉, 이중편파 레이더 강우강도는 지상관측 강우강도보다 약간 과소추정된다고 볼 수 있다.
다음으로, 상태추정시스템 구축을 위해 G/R비를 적절히 대변할 수 있는 시계열 모형을 확인하였다. 통상 G/R비 시계열에 적합한 시계열 모형은 차수가 1인 자기회귀모형(AR(1) 모형)으로 알려져 있다. AR(1) 모형은 자기상관함수(autocorrelation function, ACF)가 지수적으로 감소하다가 소멸하는 형태이며, 부분자기상관함수(partial autocorrelation function, PACF)는 시차가 1 이후에는 0으로 급격히 감소하는 형태를 가진다. 첫 번째 호우사상에 대해 유도한 ACF와 PACF는 Fig. 7과 같다. 누적시간에 관계없이 G/R비 시계열에 대한 ACF는 모두 지수적으로 감소하며, PACF는 lag-1 이후에 값이 급격하게 감소하는 형태로 유도되었다. 이러한 결과를 통해 본 연구의 G/R비 시계열 또한 AR(1) 모형의 특성이 나타남을 확인하였다. 두 번째 호우사상에서도 동일한 결과를 확인하였다. AR(1) 모형의 매개변수는 잔차분석을 통해 결정하였으며, 최종적으로 구축된 G/R비의 AR(1) 시계열 모형은 Table 4와 같다.
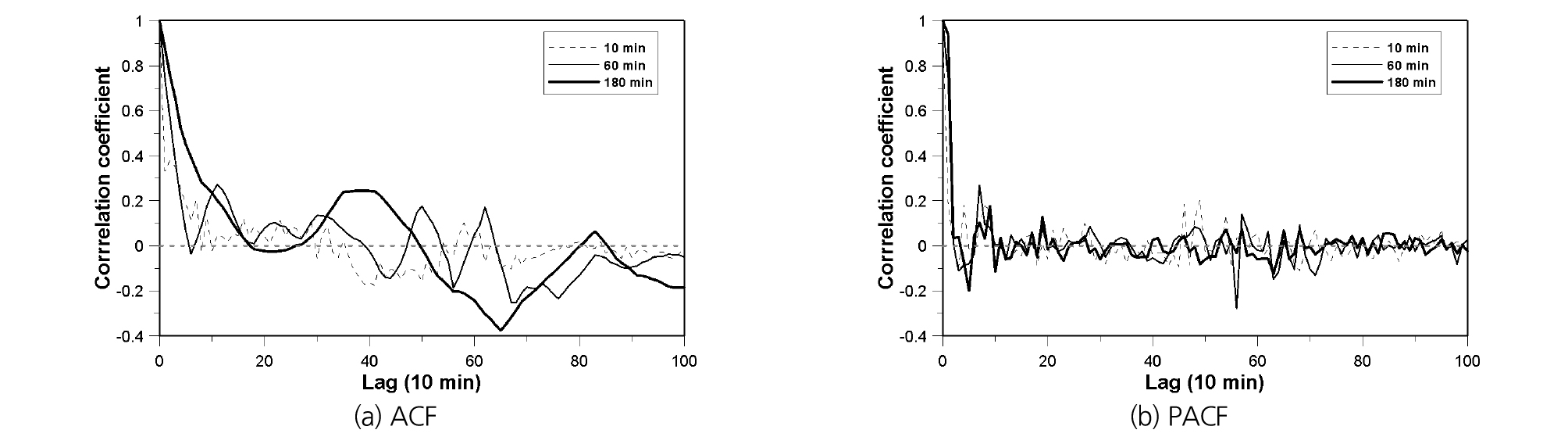
Table 4. Time series models for the G/R ratio
| Accumulation time (min) | Storm event 1 | Storm event 2 |
| 10 | ||
| 60 | ||
| 180 |
4.2 듀얼칼만필터를 이용한 G/R비의 실시간 예측
듀얼칼만필터를 이용한 G/R비의 실시간 예측이 성공적으로 이루어지려면 상태변수와 모형 매개변수의 갱신에 영향을 미치는 오차분산이 적절한 값으로 결정되어야 한다. 따라서 본 연구에서는 시스템방정식의 오차분산과 관측방정식의 오차분산 사이의 관계를 고려하였다. 2.5절에서 설명한 바와 같이 듀얼칼만필터의 시스템 방정식의 오차분산과 관측방정식 오차분산은 서로 선형적인 관계를 가지며, 그 비율은 값에 의해 결정된다(Eq. (16)). 본 연구에서는 관측방정식 오차분산이 더 큰 경우(=0.1), 두 분산의 규모가 같은 경우(=1), 시스템방정식 오차분산이 더 큰 경우(=10) 세 가지 경우에 대해 G/R비를 예측하였다.
또한, 듀얼칼만필터를 이용한 G/R비의 실시간 예측 결과와 칼만필터를 이용한 예측 결과를 비교하였다. 두 방법의 가장 큰 차이는 G/R비 AR(1) 모형의 매개변수를 실시간으로 갱신시키는지, 그렇지 않고 고정된 값으로 설정하는지에 있다. 칼만필터에서는 매개변수가 고정된 값이므로 상태변수만 갱신되는 반면, 듀얼칼만필터에서는 상태변수의 갱신과 동시에 모형 매개변수의 갱신도 함께 이루어진다. 이러한 차이에 의해 두 시스템의 G/R비 예측 결과도 차이가 발생하게 된다.
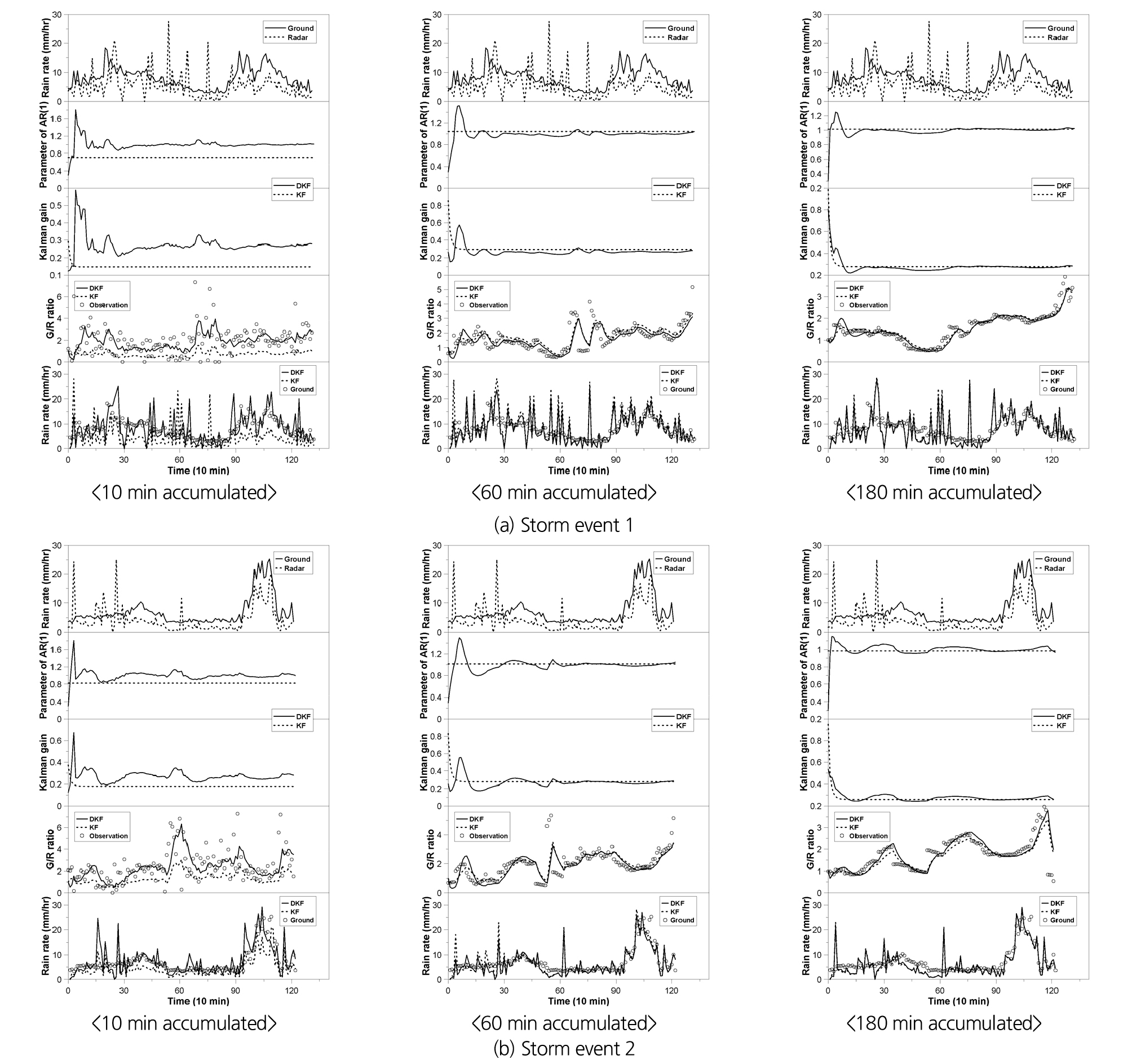
듀얼칼만필터와 칼만필터의 AR(1) 모형의 매개변수, Kalman gain 등의 변화는 Figs. 8 and 9와 같다. 전체적으로 듀얼칼만필터는 시간이 흐름에 따라 AR(1) 모형의 매개변수 가 지속적으로 변화하지만 칼만필터는 그렇지 않았다. 즉, 칼만필터는 G/R비의 시계열모형이 강우의 실시간 변동을 고려하기 어려운 것으로 판단된다. 또한, 듀얼칼만필터의 모형추정시스템에서는 AR(1) 모형의 매개변수 와 Kalman gain의 변동 추세가 상당히 유사하게 나타났다. 반면 칼만필터는 AR (1) 모형의 매개변수 가 초기치로 고정되므로 Kalman gain 또한 변화하지 않았다. 또한, 듀얼칼만필터 적용 초기에는 매개변수 와 Kalman gain이 크게 변동하나 필터링이 진행될수록 점점 수렴하는 형태를 보였다.
Fig. 8은 를 0.1로 고정한 상태에서 누적시간별로 G/R비 예측을 수행하고 레이더 강우강도를 보정한 결과를 시계열로 나타낸 것이다. 누적시간에 따라 다른 G/R비 예측 결과가 나타났다. 먼저, 누적시간이 길어질수록 매개변수 와 Kalman gain의 변동이 작고, 듀얼칼만필터와 칼만필터의 차이가 줄어들었다. 특히 누적시간이 180분인 경우에는 초반부를 제외하고는 결과의 차이가 거의 없었다. 이는 누적시간이 길어지면서 G/R비의 변동이 줄고 시계열의 특성이 많이 변화하지 않아 듀얼칼만필터의 매개변수가 거의 갱신되지 않기 때문이다. 누적시간 180분인 경우, 듀얼칼만필터의 변화 경향이 칼만필터의 고정된 매개변수와 유사해지는 것을 확인할 수 있다.
또한, 누적시간에 따라 듀얼칼만필터와 칼만필터의 G/R비 예측결과가 다르게 나타났다. 누적시간이 10분인 경우에는 산정된 G/R비의 변동성이 누적시간이 긴 경우보다 더 컸다. 따라서 이러한 변동성을 고려하기 어려운 칼만필터는 적절치 못한 범위의 G/R비가 예측되었다. 칼만필터로는 G/R비가 과소하게 예측되고, 이는 결국 레이더 강우강도의 편의보정이 제대로 이루어지지 않는 결과로 이어졌다. 반면에 듀얼칼만필터는 강우의 변동성을 고려하여 시계열모형의 매개변수 가 실시간으로 갱신되기 때문에 적절한 범위의 G/R비를 예측하며, 편의보정 또한 적절히 이루어졌다. 그러나 둘의 차이는 누적시간이 길어질수록 줄어들게 되는데, 그 이유는 G/R비의 변동이 상당히 줄어들어 듀얼칼만필터의 와 Kalman gain의 거동이 칼만필터의 결과와 매우 유사해지기 때문이다.
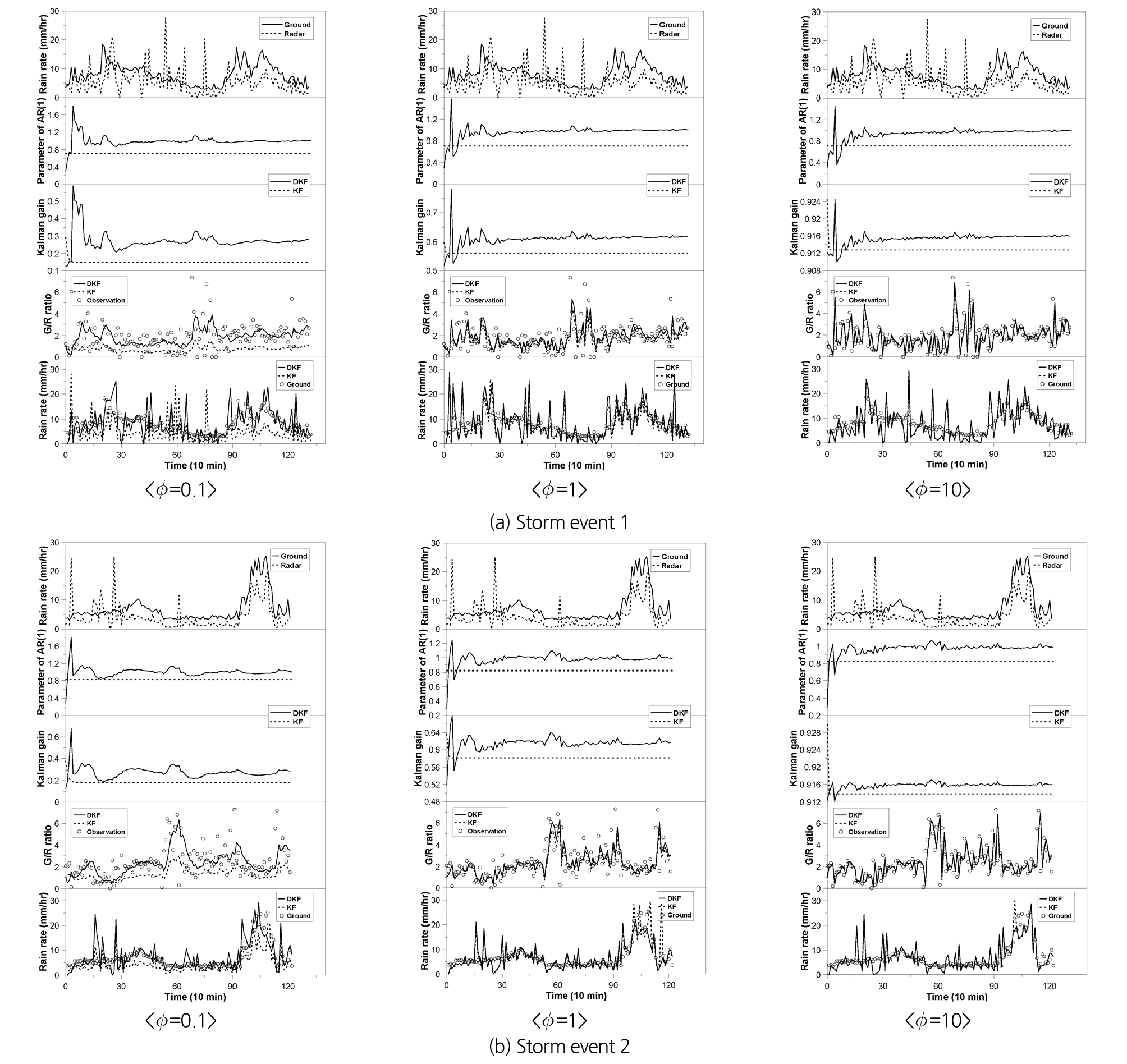
다음으로 Fig. 9는 누적시간이 10분인 경우에 대해 를 0.1, 1, 10으로 바꾸어가며 G/R비를 예측하고 레이더 강우강도의 편의보정 결과를 나타낸 것이다. 를 조정함에 따라 G/R비와 AR(1) 모형의 매개변수 , Kalman gain의 변화 양상이 달라지며, 듀얼칼만필터와 칼만필터 결과의 차이도 다르다. 먼저, 가 0.1인 경우는 시스템방정식의 오차분산에 비해 관측방정식의 오차분산이 큰 경우이다. 따라서 G/R비의 예측에 이전 시점 관측치보다는 예측치에 의한 영향이 더 크기 때문에 Kalman gain이 작은 값으로 산정되었다. 또한, 칼만필터와 듀얼칼만필터의 G/R비 예측 결과의 차이가 상당히 크게 나타났다. 듀얼칼만필터의 G/R비 예측 결과는 관측된 자료로 산정한 G/R비와 유사한 경향이 나타난 반면, 칼만필터의 G/R비는 1보다 작은 과소한 값으로 예측되었다. 이와 반대로 가 10인 경우는 예측치의 영향보다 관측치의 영향이 더 큰 경우이다. G/R비의 예측에 이전 시점의 관측치가 큰 영향을 미치기 때문에 Kalman gain이 0.9 근방으로 매우 큰 값으로 결정되었다. 그리고 듀얼칼만필터와 칼만필터가 유사한 예측을 수행하였다. 이는 필터링 시스템에서 상태변수를 갱신할 때 관측치로부터 받는 영향이 매우 크기 때문에 상대적으로 매개변수 갱신의 영향은 미미해지기 때문인 것으로 판단된다. 즉, 가 과도하게 큰 값으로 설정되면 Kalman gain의 값이 1에 매우 가까워져서 듀얼칼만필터의 효용성이 떨어지게 된다. 그러나 이는 결코 칼만필터에 비해 예측 성능이 떨어진다는 의미는 아니다. 오히려 듀얼칼만필터는 시스템방정식과 관측방정식의 오차분산 규모에 관계 없이 어느 정도의 G/R비 예측 성능을 확보할 수 있다고 해석할 수 있다. 이 점은 전통적인 칼만필터에서는 나타나지 않는 특성이다.
5. 결 론
본 연구에서는 듀얼칼만필터를 이용하여 이중편파 레이더 강우의 실시간 편의보정을 수행하였다. 듀얼칼만필터는 기존의 칼만필터와 달리 두 개의 시스템(상태추정시스템, 모형추정시스템)이 동시에 가동되면서 실시간으로 보정계수가 예측된다. 상태추정시스템은 기존의 칼만필터와 동일하며, 모형추정시스템이 지속적으로 모형의 매개변수를 갱신함으로써 상태변수의 예측에 영향을 미친다. 2016년 7월에 발생한 긴 지속시간을 가지는 호우사상에 듀얼칼만필터기법을 적용하였으며, 비슬산 이중편파 레이더 관측자료를 이용하였다. 먼저, 이중편파 레이더 변수 중 수평반사도와 차등반사도에 대한 강우추정식을 이용하여 레이더 강우를 추정하였다. 다음으로, G/R비에 대한 시계열 모형과 상태-공간모형을 구축하였다. 구축된 상태-공간모형에서 듀얼칼만필터를 이용하여 보정계수를 실시간으로 예측하였다. 마지막으로, 예측된 보정계수를 적용하여 레이더 강우의 편의를 보정하였다. 실시간 편의보정에 대한 평가는 지상관측 강우와의 비교로 이루어졌다. 이에 대한 결과를 정리하면 다음과 같다.
먼저, 이중편파 레이더 강우강도와 지상관측 강우강도를 이용하여 산정된 G/R비는 대부분 1과 2 사이의 값으로 결정되었다. 지상관측 강우강도보다 레이더 강우강도가 약간 과소추정되는 경향을 보였다. G/R비에 대한 시계열을 설명할 수 있는 모형으로는 AR (1) 모형이 적합한 것으로 확인되었다. 다음으로, 듀얼칼만필터로 예측한 G/R비는 관측된 자료를 이용하여 산정한 G/R비와 유사한 경향을 가지는 것으로 나타났다. 누적시간과 오차분산간의 비율을 고려한 여러 경우의 비교를 통해서는 G/R비의 변동성이 커질수록 듀얼칼만필터가 칼만필터에 비해 우수한 예측 성능을 가지는 것으로 확인되었다. 그리고 듀얼칼만필터는 누적시간과 오차분산의 비율에 관계없이 어느 정도의 예측 성능을 보였다. 듀얼칼만필터로 예측된 G/R비를 이용한 편의보정을 통해 레이더 강우강도의 편의가 개선됨을 확인하였다. 추가적으로 누적시간 60분이 듀얼칼만필터를 이용한 G/R비의 실시간 예측에 가장 적절한 것으로 나타났다.
결과적으로, 듀얼칼만필터는 이중편파 레이더 강우강도의 실시간 편의보정에 매우 적합한 기법인 것으로 나타났다. 본 연구를 통해 강우의 변동성이 크고, 지속시간이 긴 호우사상에 대해 그 적합성이 검증되었다. 강우가 집중되다가 강도가 약해지는 경우, 이와 반대로 강우가 적게 발생하다가 증가되는 경우에 대해서 모두 적절한 보정계수 예측 결과가 나타났다. 전통적인 칼만필터로 예측하기 어려운 부분을 듀얼칼만필터로는 적절히 예측할 수 있음을 확인하였다. 변동이 큰 호우사상은 돌발홍수를 유발하기도 하는데, 듀얼칼만필터로 실시간 편의보정된 강우를 이용한다면 예경보의 오차를 줄이는 데에도 많은 도움이 될 수 있을 것이다. 다만, 본 연구에 적용된 기법은 필터링기법의 특성상 분산의 초기치, 자료를 설명하는 시계열 모형 등이 적절히 결정되었는지에 대한 검토가 반드시 이루어져야 한다. 또한, 이중편파 레이더 강우추정관계식의 강우 추정 정확도에 따라서도 예측 및 편의보정 결과의 차이가 나타날 것으로 판단된다.
