

1. 서 론
2. 연구방법
2.1 시공간 초분광영상 획득
2.2 초분광영상을 이용한 추적자 농도 산출
2.3 초분광영상을 이용한 RGB영상 제작 및 추적자 농도 산출
2.4 분산계수 산정방법
2.5 추적자 실험 개요
3. 연구결과
3.1 획득된 초분광 영상
3.2 연구대상지 수리량 측정 결과
3.3 추적자 농도 산출 결과
3.4 분산계수 산정 결과
4. 결론 및 향후연구
1. 서 론
하천 주변 친수구역 조성 사업, 4대강 사업 등과 같은 하천정비 사업으로 인해 하천의 흐름특성이 계속적으로 변동하고 있으며, 각종 오염물질 유입으로 수질사고의 위험이 높아지고 있다. 수질사고가 발생했을 경우, 하천의 흐름특성을 고려해 오염물질의 농도 및 도달시간을 예측하여 신속한 방재작업으로 하류로의 영향을 최소화해야한다. 수계로 유입되는 오염물질은 하천의 흐름에 따라 이송(advection), 확산(diffusion), 분산(dispersion)의 물리적 혼합이 이루어진다. 이송은 유속에 의한 물질의 이동으로 수리조건 중 평균유속에 의존적이며, 확산은 물질의 퍼짐현상으로 난류성분에 의해 농도가 높은 곳에서 낮은 주변으로 퍼지는 현상을 말한다. 분산이란 전단흐름과 확산의 결합에 의한 퍼짐현상이다. 오염물질의 거동을 추적하기 위해서는 확산계수와 분산계수 산정이 필요하며, 난류확산계수는 난류성분의 평균과정에서 유도되어 3차원 이송-확산거동 또는 수표면 및 연직방향 확산 거동 해석에 사용되고, 분산계수는 수심, 폭, 단면 등의 공간적인 평균과정에서 유도되므로 용존성 오염물질의 확산범위 해석에 사용된다. 수계로 유입되는 오염물질의 거동을 연구한 사례는 방사선 동위원소를 이용한 횡혼합 추적실험(Seo et al., 2002), 실내 수로에서 동수역학적인 영향이 혼합에 미치는 영향 연구(Baek et al., 2005), 실규모 실험수로에서 GPS 부자와 Rhodamine WT를 이용해 확산계수와 분산계수를 산정(Han et al., 2019)한 실험 사례가 있다. 이러한 부유성 혹은 용존성 물질을 이용한 추적자 실험은 측정 단면을 정밀하게 직접 계측해 많은 인력과 비용이 소요되며, 고정식으로 설치한 소수의 계측장비로부터 수집한 농도자료만을 이용해 분석하기 때문에 공간적으로 높은 해상도의 자료 취득은 어렵다는 한계가 있다. 이러한 한계를 보완하기 위해 최근에는 소형 드론을 이용해 촬영한 항공영상을 이용해 하천에 유입된 오염물질의 시공간적 분포를 분석한 연구(Baek et al., 2019)도 수행되었지만, 한정적인 분광정보를 이용한 연구였다.
이처럼 현장계측의 한계를 극복하기 위해 최근에는 드론을 이용한 하천원격탐사가 활발히 이루어지고 있다. 원격탐사는 광원으로부터 발생한 빛, 방사선 등의 전자기파신호가 대상체의 표면에서 반사되거나 방출하는 정도를 측정하여 대상체의 특성을 파악하는 기술이며, 대상체와 센서 사이에 발생하는 상호작용의 형태에 제한을 두지 않고, 물리적으로 접촉하지 않은 상태에서 센서를 통해 개체의 상태나 정보를 수집할 수 있다(Chuvieco and Huete, 2009). 하천원격탐사의 경우 지표면 원격탐사와는 다르게 계속적인 하천의 움직임으로 인해 시간적 변화가 빠르고, 공간적으로는 종방향의 규모가 횡방향의 규모보다 압도적으로 크므로 면보다는 선에 가깝다. 따라서 다양한 원격탐사 플랫폼 중 낮은 고도에서도 운용이 가능하고, 빈도 높은 자료를 수집할 수 있는 드론이 많이 이용되고 있다. 드론은 항공기나 위성에 비해 촬영 고도가 낮기 때문에 공간해상도가 크고, 운용이 편리해 작은 단위의 하천을 간편하게 조사할 수 있다. 또한 항공기나 위성 플랫폼에 비해 짧은 주기의 자료수집이 가능하다. 또한, 현장조사시 직접 접근하기 어렵거나 위험한 지역에서의 활용도도 높아 하천환경조사나 지형측량, 그리고 홍수범람도 작성 등 다양한 하천원격탐사 분야 뿐만 아니라 식생, 농업, 임업, 수질 모니터링 등에 이용되고 있다. 드론을 이용한 하천원격탐사에 가장 널리 사용되어온 RGB영상은 정성적·정량적으로 기록이 어려운 한계가 있어 최근에는 다중분광센서 또는 초분광센서를 이용한 기술이 주목받으며 연구가 활발히 이루어지고 있다. Klemas (2011)는 초분광영상을 활용하여 하천생태에 영향을 끼칠 수 있는 조류를 감지하는 연구를 하였으며, Legleiter et al. (2004)는 항공기를 활용하여 촬영된 초분광영상으로 수심을 측정하는 연구를 수행하였다. 국내에서도 초분광 스펙트로미터를 활용하여 수집한 분광특성을 활용하여 수심 측정 기법의 적용성을 검토한 연구(You et al., 2020)가 수행되었으며, 초분광영상을 활용하여 하천수에 혼합된 유해화학물질의 분광라이브러리를 구축한 연구(Gwon et al., 2020)도 수행되었다.
하천의 오염물질을 모니터링하기 위해서는 공간을 이동하는 입자의 관점에서 물리량을 표현하는 Lagrangian 방식보다 특정 위치에서의 물리량의 변화를 표현하는 Eulerian 방식이 적합하다. 그러나 대부분의 초분광센서를 활용한 연구는 드론에 탑재하거나, 지상이나 보트의 이동식 플랫폼에 탑재하여 초분광영상을 획득하기 때문에 동일시간에 공간적 분광특성의 분포를 파악할 수 없으며, 동일 지점에서의 분광특성을 지속적으로 파악할 수 없다. 따라서 본 연구에서는 기존의 면단위를 측정하는 이동식 플랫폼의 한계를 극복하고 하천 모니터링에 적합한 Eulerian 방식을 적용하기 위하여 고정식 초분광영상 촬영방식을 적용하였다. 초분광센서를 고정식으로 운용하면 공간적으로는 선단위의 영상을 획득할 수 있고, 특정 공간(선)에서의 시계열영상을 촬영할 수 있기 때문에 시공간(Spatio-temporal) 초분광영상을 획득 할 수 있다. 고정식으로 촬영한 초분광영상을 획득할 경우 특정 공간(선단위)에서 오염물질의 탐지가 가능하고, 시간당 통과하는 물질의 양을 추정할 수 있게 된다.
본 연구에서는 하천으로 유입되는 오염물질의 거동을 분석하기 위해 형광성물질인 Rhodamine WT를 이용하여 연구를 수행하였다. 기존에 수행된 추적자 실험은 점측정으로 공간해상도가 매우 낮거나, 한정적인 파장대의 자료를 수집한 원격탐사가 수행되었기 때문에 이러한 한계를 극복하기 위하여 접촉식 센서를 활용한 농도측정과 동시에 드론과 초분광센서를 활용하여 시공간 초분광영상을 획득하였다. 촬영된 초분광영상으로부터 도출된 농도장으로 분산계수를 산정하여 오염물질 거동 추적에 시공간 초분광영상의 활용 가능성을 검토하였다.
2. 연구방법
2.1 시공간 초분광영상 획득
분광자료를 수집하는 장비에는 분광계(Spectrometer), 분광복사계(Spectroradiometer), 초분광센서(Hyperspectral Sensor)가 있다. 이 중 본 연구에 사용한 초분광센서는 Corning사의 microHSI 410 SHARK (Corning, 2017)로 물체에서 반사되는 빛의 정보를 400~1,000 nm의 VNIR (Visible and near-infrared) 파장대에서 4 nm 간격으로 수집한다. 센서 크기는 렌즈포함 13.6 cm × 8.7 cm × 7.0 cm이며, 중량은 0.68 kg로 초분광장비 중 경량으로 드론에 탑재되어 운용되기 용이하여 실무 활용도가 높은 장비이다. microHSI 410 SHARK의 분광정보 수집 방식은 라인스캐닝(Line Scanning) 방식 중 푸시 브룸(Push Broom) 방식으로 다수의 광학 센서를 선형으로 배치해 프리즘을 통해 들어오는 빛을 공간적으로 기록한다(Fowler, 2014). 본 장비는 GPS 및 IMU가 내장되어 드론 장착시 공간적 경로 추적을 용이하게 하였으며, Kalman 필터로 측정값의 오차를 제거한다. 촬영 각도는 29.5도로 주사선 당 682개 화소를 120 Hz의 측정빈도로 수집이 가능하다.
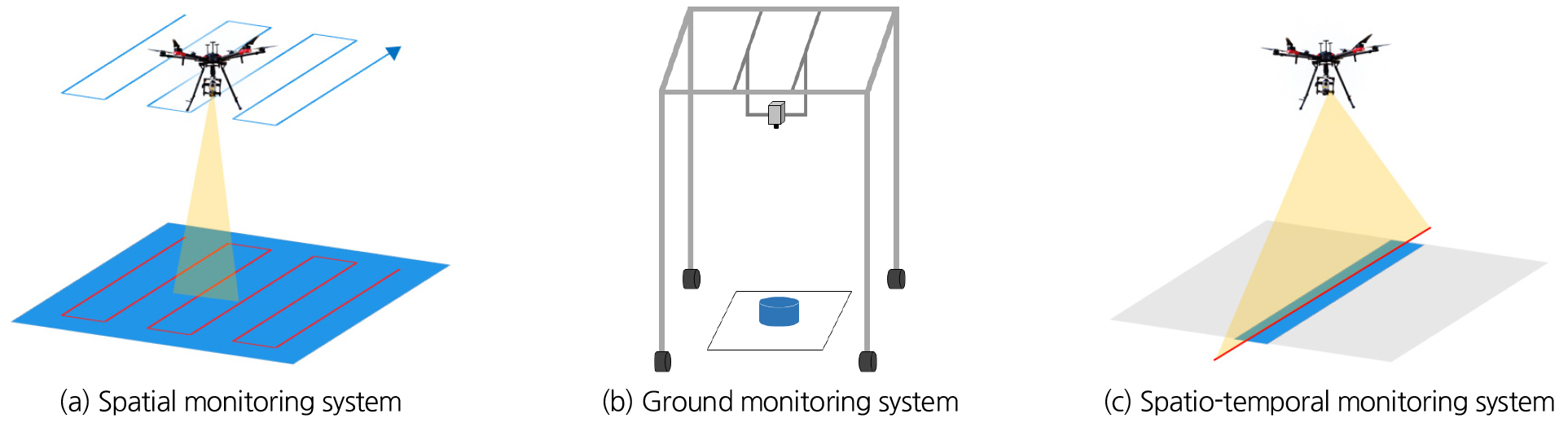
초분광센서를 하천에서 활용하기 위해 DJI사의 Matrice 600 pro 드론을 이용하였으며, 드론과 초분광센서의 장착과 흔들림 보정 및 촬영각도 조절을 위해 DJI사의 Ronin-mx 짐벌을 이용하였다. 일반적으로 하천원격탐사를 위한 드론운용은 하천의 흐름방향을 따라 모니터링 영상을 촬영하거나 드론 플랫폼이 이동하는 경로의 분광특성을 공간적으로 선형으로 저장하고 이를 면단위의 영상으로 정합하여 공간을 측정할 수 있게 된다(Fig. 1(a)). 고도 120 m에서 운용할 경우 지상 약 65 m 길이의 라인에서 9.5 cm 크기 682개 화소로 150개 파장의 분광 스펙트럼 정보를 얻을 수 있으며, 일정한 속도로 움직이는 드론 경로를 따를 경우 공간해상도 9.5 cm 크기 2차원 공간에서의 초분광 데이터큐브를 얻을 수 있다. 또한, 분광라이브러리를 구축하거나, 특정 시료의 분광 정보를 초분광센서로 수집할 때는 Fig. 1(b)와 같이 이동식 거치대에 초분광센서를 고정하여 거치대를 이동시키며 초분광영상을 수집한다. 이 경우에는 매우 좁은 면적에서 고해상도의 초분광영상을 수집 할 수 있다. Fig. 1(c)는 드론에 초분광센서를 탑재하여 특정 위치에서 호버링해 초분광영상을 수집하는 모습이다. 이 때, 라인스캐닝 방식으로 분광정보를 수집하기 때문에, 특정 지점의 물리량을 계측하는 접촉식 센서들과는 다르게 매시간 마다 선단위의 공간적 분광정보를 수집할 수 있다. 본 연구에서는 하천의 오염물질로 가정한 추적자(Rhodamine WT) 물질의 농도변화를 감지하기 위하여 하천의 단면 중심부에서 약 10분간 드론을 호버링해 선단위의 공간에 대한 시계열 초분광영상을 수집하였다.
일반적으로 하천에서 초분광영상을 수집할 때는, 하천을 중심으로 횡방향으로 좌·우안을 왕복하며 촬영하기 때문에(Fig. 1(a)) 이러한 형태의 영상을 처리하기 위해서는 영상에 좌표를 부여하여 공간정보화 하는 지리참조(Georeferencing)를 포함한 기하보정(Geometric Calibration)과 영상을 결합하는 영상정합(Image Registration), 측정된 초분광 영상의 DN값을 반사도 값으로 변환시키는 방사보정(Radiometric Calibration) 등의 후처리 기술이 필요하다(You, 2018). 그러나 본 연구에서 수집한 시공간 초분광영상은 면단위의 영상을 제작할 필요가 없기 때문에 기하보정과 영상정합의 과정이 불필요하다. 또한, 특정 지점의 물리량변화를 감지하기 위한 목적이고, 추적자로 사용한 형광성물질인 Rhodamine WT는 빛을 방출, 흡수하는 파장이 뚜렷한 고유의 분광특징을 가지기 때문에 방사보정 또한 불필요하다.
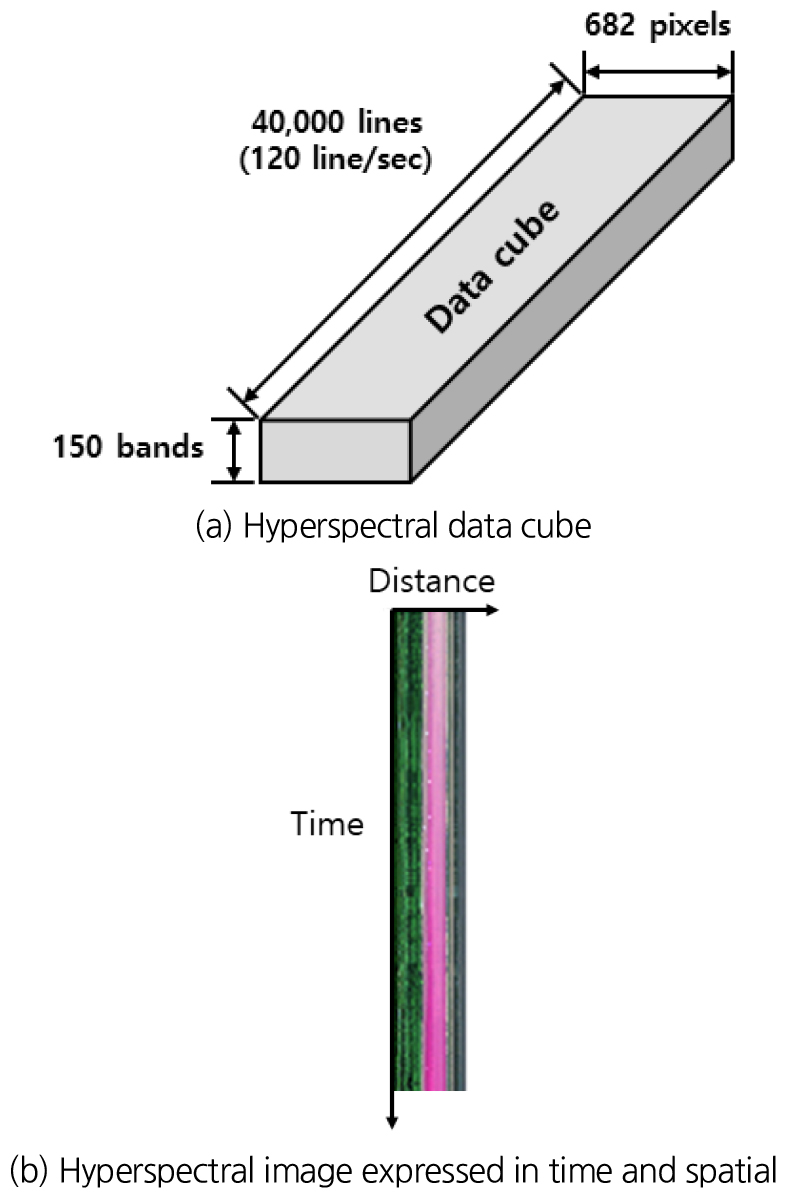
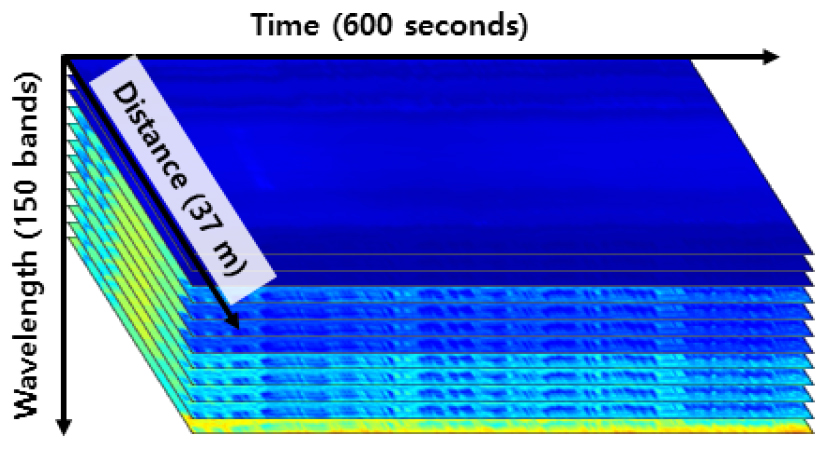
Fig. 1(c)의 방법으로 촬영된 시공간 초분광영상은 Fig. 2(a)의 형태의 초분광 데이터큐브로 저장된다. 공간적으로는 하폭이 682 화소 내에 촬영되며, 초분광센서의 고도에 따라 공간해상도가 결정된다. 시간적으로는 초당 120 line이 촬영되며, 분광해상도는 150 band로 400~1,000 nm 구간에서 약 4 nm 간격으로 150개 파장의 분광정보가 획득된다. 촬영된 초분광영상을 RGB영상의 형태로 표출한 결과는 Fig. 2(b)이며, 시간의 흐름에 따른 추적자의 농도 변화를 확인할 수 있다. 초분광영상은 대상 하천의 하폭 전체를 촬영 할 수 있는 120 m 고도에서 촬영하였으며, 드론비행이 가능한 약 10분간 촬영하였다.
2.2 초분광영상을 이용한 추적자 농도 산출
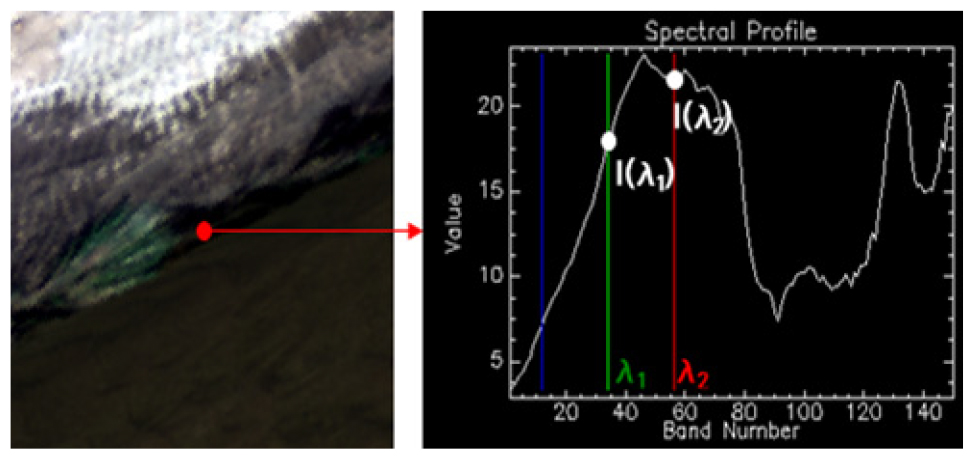
초분광영상의 분광정보는 영상의 각 화소별로 빛의 세기인 방사휘도(radiance)로 저장 되는데, 이를 추적자의 농도로 변환을 해주어야 한다. 본 연구에서는 수집된 분광 정보 중 추적자의 특성을 반영하는 최적 파장대를 찾기 위해 최적 밴드 탐색 기법(Optimal Band Ratio Analysis, OBRA)을 적용하였다(You, 2018). Fig. 3은 일반적인 초분광영상으로부터 관측값이 존재하는 위치에 대해 분광특성을 추출하는 방법을 도시화 한 것으로, 분광특성은 Eq. (1)과 같이 두가지 밴드의 빛의 세기의 비를 이용하는 밴드비 혹은 Eq. (2)와 같은 지수형태로 정의한다. 본 연구에서는 Eq. (1)의 밴드비를 활용하여 추적자의 분광특성을 정의하였다. 여기서, I는 특정 파장()에서의, 빛의 세기이다.
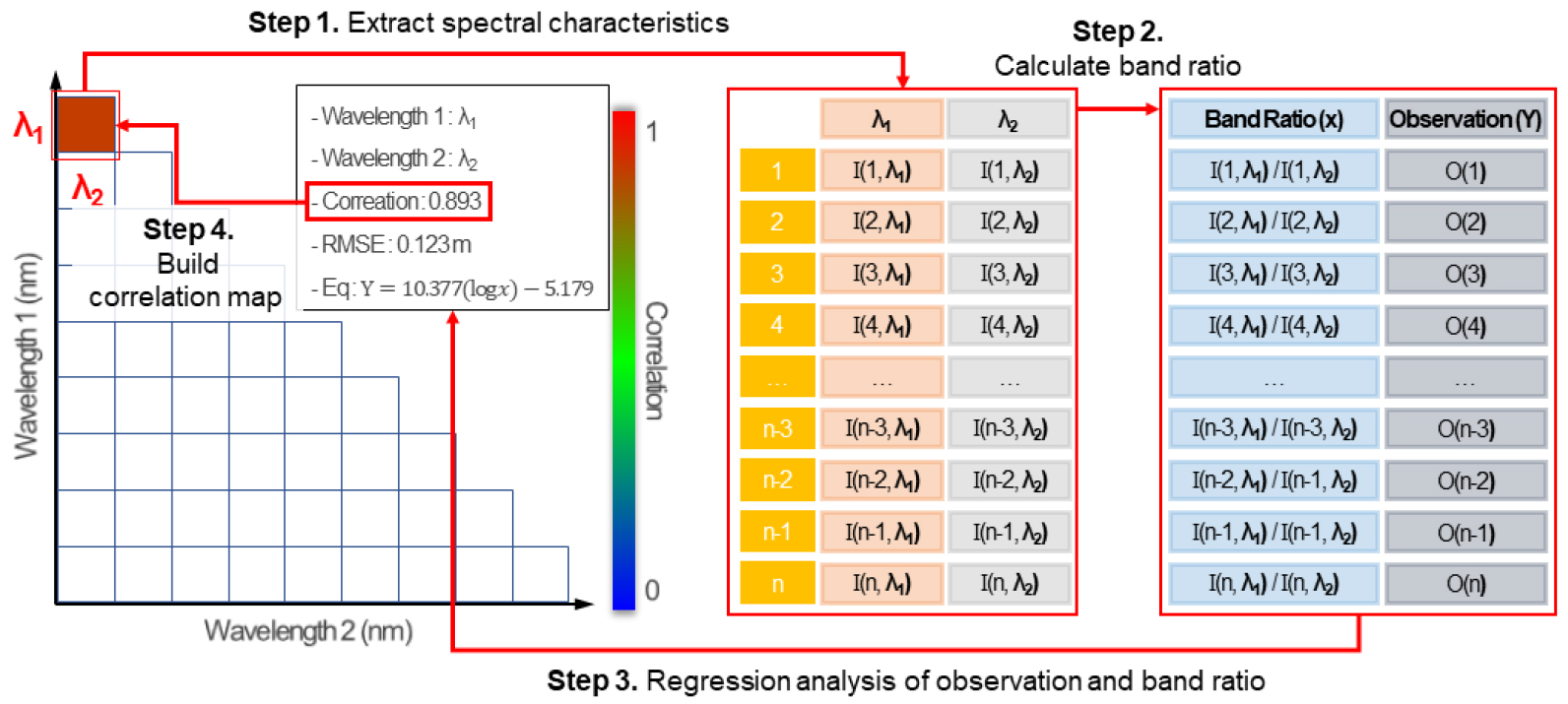
최적 밴드 탐색 기법은 초분광 영상을 구성하는 전체 파장의 수에 대해, 1) 두 파장을 선택하는 모든 경우의 수를 고려하여 선택된 두 파장 와 에 대한 분광특성을 추출하고, 2) 분광특성의 정의에 따라 밴드비를 산정, 3) 관측값과 밴드비(분광특성)의 회귀분석을 통해 상관계수를 산출한다. 4) 파장 와 의 순서쌍의 위치에 상관계수의 크기를 색으로 저장하여 상관계수 맵을 구축한다(Fig. 4). 구축된 상관계수 맵을 통해서 관측값과 상관관계가 높은 두 파장으로 이루어진 순서쌍을 확인 할 수 있으며, 가장 높은 상관계수를 보이는 순서쌍을 이용하여 관측값을 도출하는 회귀식을 산정한다.
2.3 초분광영상을 이용한 RGB영상 제작 및 추적자 농도 산출
일반 광학영상과 초분광영상에서 각각 추적자 농도를 산출한 후 비교하기 위해 초분광영상으로부터 Red 밴드(650 nm)에 인접한 649.72 nm, Green 밴드(560 nm)에 인접한 561.62 nm, Blue 밴드(450 nm)에 인접한 449.5 nm의 3개 밴드의 복사휘도를 추출해 RGB영상으로 제작하였다. 초분광영상에서 수집되는 분광정보는 복사휘도(Radiance)로 실수형태로 기록되며 의 단위를 갖지만 RGB영상의 분광정보는 0~255의 한정된 값의 정수형태의 Digital Number로 기록되기 때문에 단위를 갖지 않는다. 따라서, 각 밴드별로 기록된 방사휘도 값 중 가장 낮은 값을 0, 가장 높은 값을 255로 linear stretch하여 RGB영상으로 제작해 추적자 농도 산출에 이용하였다. 제작된 RGB영상은 2.2절의 초분광영상을 이용해 산출된 추적자 농도와 비교하기 위하여 최적 밴드비 탐색 기법을 동일하게 적용하여 분석을 진행하였다.
2.4 분산계수 산정방법
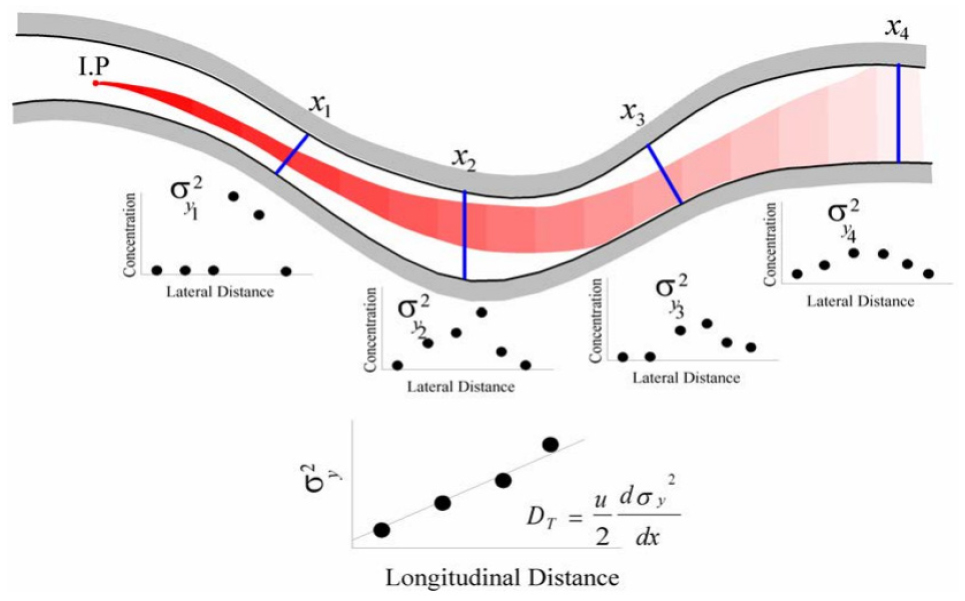
분산계수는 추적자의 실측값을 이용하여 산정법을 통해 결정할 수 있다. 산정법으로는 모멘트법과 추적법이 있으며, 본 연구에서는 추적자를 순간주입하였기 때문에, 단순모멘트법(Simple Moment Method, SMM)을 활용하여 분산계수를 산정하였다(Fig. 5). 단순모멘트법은 임의의 지점에서 농도의 횡분포를 통해 얻을 수 있는 2차 모멘트의 종방향 변화율이 횡분산계수와 비례한다는 원리를 이용한 방법이다. Beltaos (1975)는 단순모멘트법을 적용하기 위해 추적자의 주입량을 이용해 농도의 시간변화율을 vanish 했다.
이때, 는 추적자의 주입량이고, C는 추적자의 수심평균농도 이며, t는 시간이다. 유속과 수심이 일정하고 횡방향 유속도 무시할 정도로 작다고 가정하면 2차원 이송-분산방정식은 다음과 같이 표현된다.
Eq. (4)의 양변에 을 곱하고 횡방향 양안의 경계 에서 까지 적분하면 Eq. (5)와 같다.
마지막으로 부분적분을 하고 정리하면 Eq. (6)이 된다.
Eq. (6)을 시간-적분된 횡방향 농도 분포의 횡방향 분산(variance), 이며 Beltaos (1975)의 제안에 따라 변형시키면 횡방향 분산은 다음과 같이 표현된다.
여기서, i지점에서의 농도는 , 유속은 ui, 수심은 hi로 표시되며, 는 임의의 지점으로부터의 거리, 는 횡구간의 폭이다. Eq. (6)을 에 대해 정리하면 Eq. (8)과 같으며 2DT/U는 종방향 거리와 통계적 분산에 대한 기울기이므로 도해법을 통해 횡분산계수를 도출할 수 있다.
2.5 추적자 실험 개요
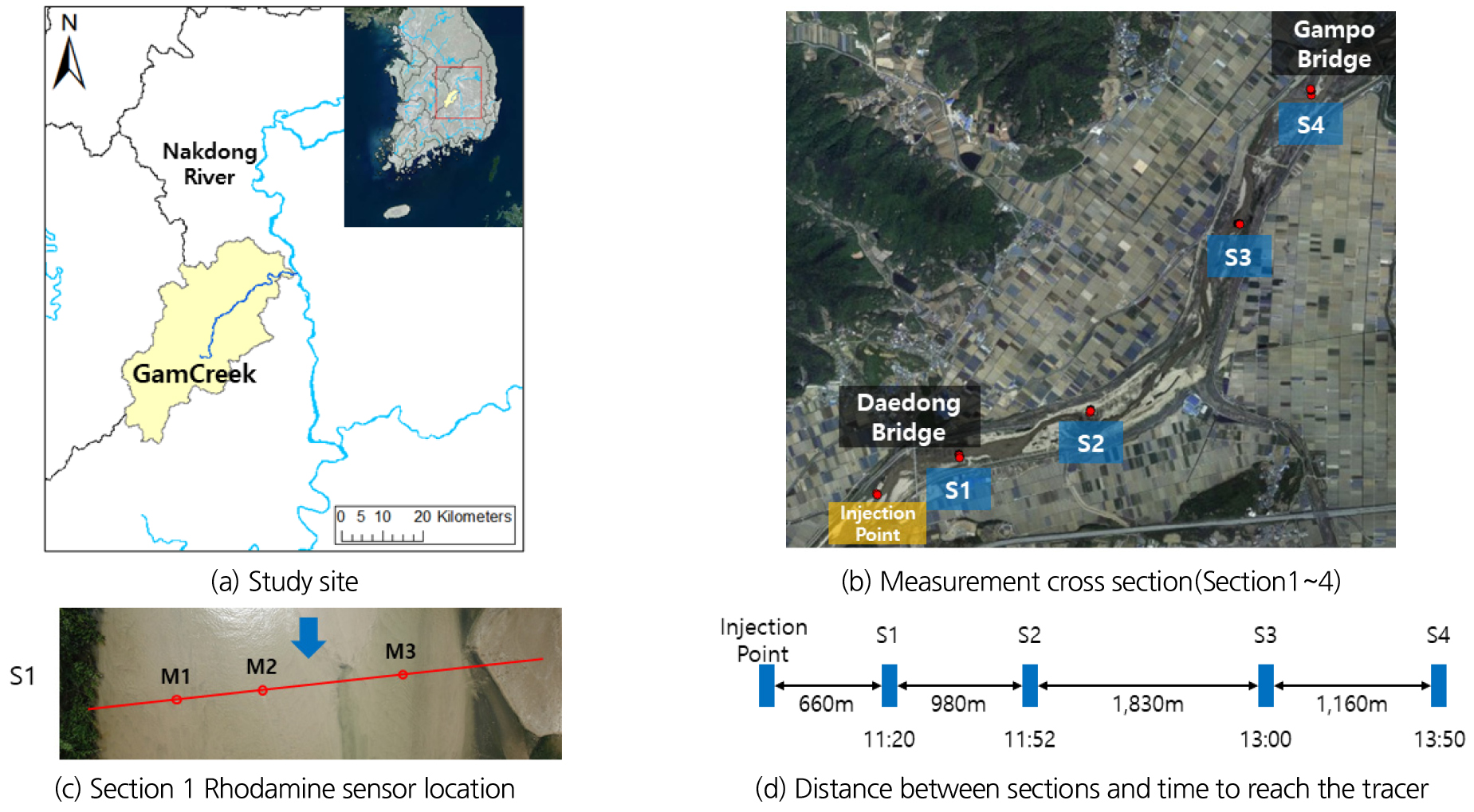
추적자 실험은 경상북도 김천에 위치한 낙동강 수계의 국가하천인 감천에서 수행하였다(Fig. 6(a)). 감천은 길이 69 km, 유역면적 1,022.13 km2이며, 경남 거창군과 경북 김천시 경계의 수도산에서 발원하여 구미시 선산읍 남쪽 낙동강 상류에 합류되는 하천이다. 감천 상류에는 공단 및 산업단지가 조성되어 있으며, 2006년 7월 낙동강 주요 취수장에서 페클로레이트가 검출되고, 2008년 3월 김천 코오롱 유화 화재사고로 페놀이 유출되어 구미광역정수장에서 페놀 검출로 인한 일시적인 취수 중단이 발생되는 등의 유해화학물질 유출 사례가 있었다. 따라서 감천은 실제 유해화학물질로 인한 수질오염사고발생이 우려되는 지역이므로 본 연구의 대상하천으로 선정하였다. 대상 구간은 대동교 상류 약 320 m 지점을 Injection Point로 설정하고 추적자를 주입하였고, 주입지점으로부터 하류 약 660 m 지점에 Section 1을 설치하였으며, Section 1에서부터 약 900 m 하류 지점에 Section 2를 설치하였다(Figs. 6(b) and 6(d)). Section 1~4의 단면에는 각각 추적자의 실제 농도를 확인하기 위하여 YSI-6000MS 센서를 각 단면에 3개씩 설치하였으며(Fig. 6(c)), 4초 간격으로 추적자의 농도를 수집하였다. 초분광영상은 Section 1과 2에서는 추적자가 유하되기 시작하는 고농도 유입시점, Section 3에서는 추적자의 농도가 감소하는 시점, Section 4에서는 확산이 모두 이루어져 육안으로 추적자의 유무를 확인하기 어려운 시점의 영상을 획득하였다. 하지만, 드론 비행시간의 한계로 인해 Section 2~4에서 수집된 초분광영상으로부터 산정가능한 추적자의 농도는 전체 추적자의 질량 중에 극히 일부라고 판단하여, 주입점에서 Section 1까지의 구간에서만 분산계수를 산정하였다.
3. 연구결과
3.1 획득된 초분광 영상
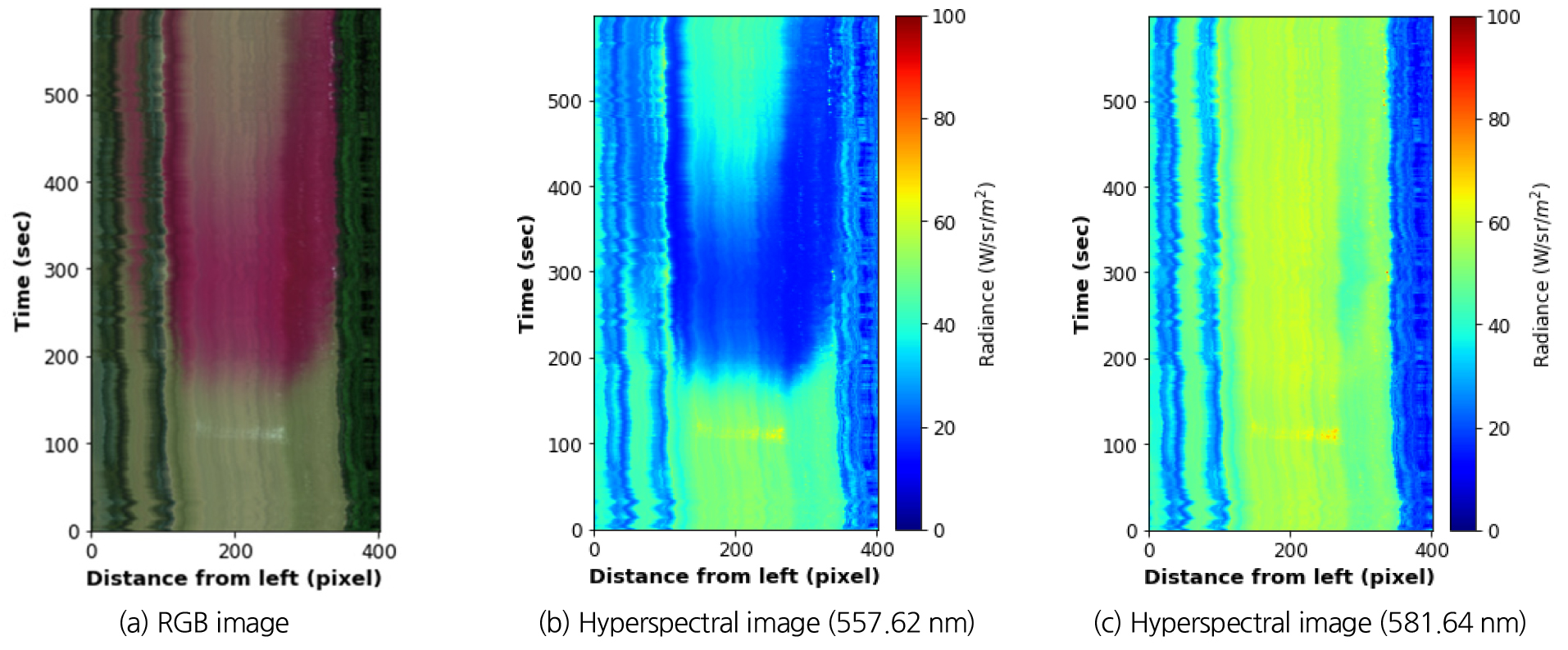
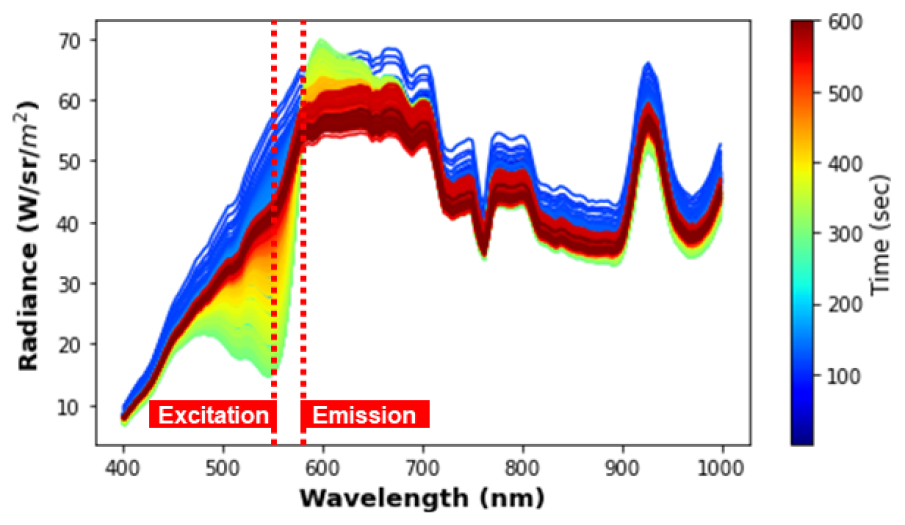
본 연구에서 제시한 방법에 따라 획득된 초분광영상은 0.093 m/pixel의 해상도로 촬영되었으며, 횡방향으로 총 682 pixel이 촬영되어 총 63.2 m가 촬영되었다. 그 중 하천을 제외한 불필요한 부분을 삭제하여 1 pixel (좌안)에서부터 400 pixel (우안)까지로 분석영역을 확정하였으며, 주 흐름이 발생하는 하천구간은 약 250 pixel에서 수집되었다. 약 10분 동안 촬영된 영상을 Red, Green, Blue 세가지 밴드의 조합으로 나타냈다(Fig. 7(a)). Figs. 7(b) and 7(c)는 특정 파장대의 초분광영상을 의 단위를 가지는 복사휘도(Radiance)의 값으로 표출한 영상이며, 총 150개 파장의 영상이 모여 데이터큐브가 생성된다(Fig. 8). Fig. 7(b)는 추적자인 Rhodamine WT가 에너지를 여기(excitation)한다고 알려진 파장 558 nm 와 인접한 557.62 nm의 초분광영상으로 Rhodamine WT의 농도가 높을수록 Rhodamine WT 입자가 많은 양의 빛을 흡수해 방출하는 빛의 양이 적기 때문에 낮은 복사휘도 값이 나타나고, 농도가 낮을수록 적은 양의 빛을 흡수하고 많은 양의 빛을 방출하기 때문에 높은 복사휘도 값이 나타난다. Fig. 7(c)는 Rhodamine WT가 빛을 방출(Emission)하는 파장인 582 nm와 인접한 581.64 nm의 초분광영상이며, 557.62 nm에서 보다 상대적으로 557.62 nm에서보다 많은 양의 빛을 방출하지만 Rhodamine WT가 없는 수체에서 방출되는 빛에너지와는 큰 차이가 없기 때문에 Rhodamine WT의 영역이 구분되지 않는다. 촬영된 초분광영상에서 하천 중앙부에 해당하는 특정 지점의 시계열 분광자료를 추출한 결과, Fig. 9에서 보이는것과 같이 Rhodamine WT가 아직 유하하기 전인 약 150초까지의 분광스펙트럼은 하천에서 관측되는 일반적인 형태를 보이지만, Rhodamine WT가 고농도로 측선을 지나가는 200~400초까지의 분광스펙트럼에서는 558 nm 부근의 파장에서 복사휘도가 낮아지고, 582 nm 부근의 파장에서는 복사휘도가 높아지는 것을 확인 할 수 있다.
3.2 연구대상지 수리량 측정 결과
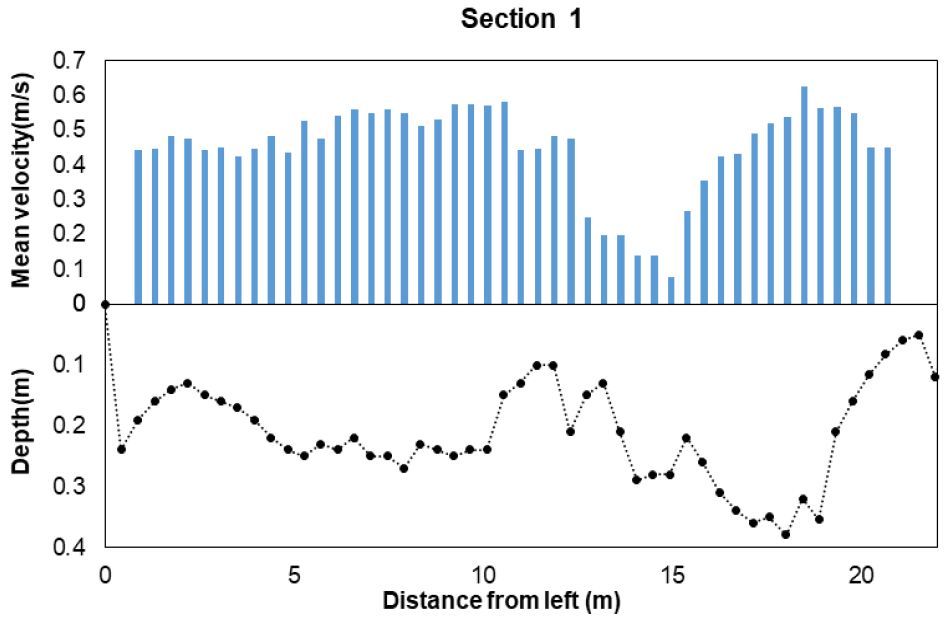
수리량 계측을 위해 음향 도플러 유속계(Sontek Flowtracker)를 이용하여 유속 및 수심을 측정하였으며, 측선 위치 및 하상 경사 등 지형 측량은 RTK-GPS (SokkiaGRX 1)를 사용하였다. 대상 하천의 전체 구간에 대한 수리량 측정결과는 Table 1과 같으며, 본 연구의 분석구간인 Section 1에서의 하폭은 22.4 m, 평균 수심은 0.2 m, 유속은 0.4 m/s, 유량은 2.36 m3/s로 측정되었으며 상세 하상형상은 Fig. 10과 같다. 본 연구를 수행한 시기는 2020년 6월로 갈수기에 해당하며, 사구가 많은 다지하천이므로 수심이 낮고 유속이 느린 흐름이 관측되었다.
Table 1.
Surveyed hydraulic data in each section
| Section 1 | Section 2 | Section 3 | Section 4 | |
| W (m) | 22.4 | 19.1 | 11.8 | 21.7 |
| H (m) | 0.20 | 0.41 | 0.37 | 0.42 |
| U (m/s) | 0.40 | 0.24 | 0.39 | 0.24 |
| Q (m3/s) | 2.36 | 2.27 | 1.87 | 2.18 |
| A (m2) | 4.58 | 7.75 | 4.37 | 9.11 |
3.3 추적자 농도 산출 결과
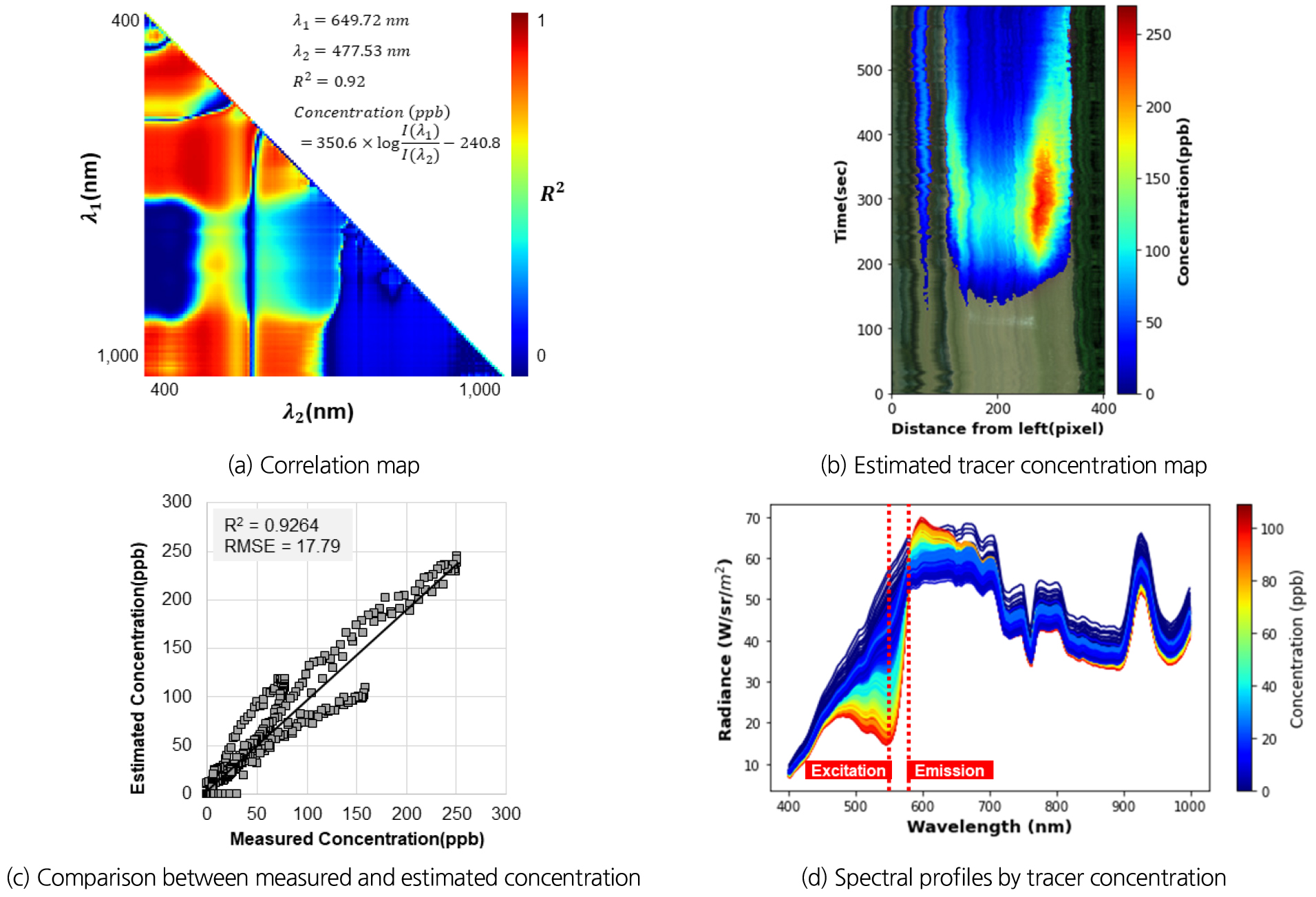
초분광영상을 활용하여 추적자의 농도를 산출하기 위해서는 추적자 측정센서가 설치된 위치의 초분광영상 pixel의 분광정보를 추출하여 추적자농도(ppb)로 환산해주어야하며, 본 연구에서는 2.2절에서 기술한 최적 밴드 탐색 기법을 적용하여 수행했다. 추적자농도와 전체 150개 파장대 간의 관계를 분석한 결과, Fig. 11(a)의 상관계수 맵이 도출되었으며, 전체 파장의 모든 순서쌍 중 추적자농도와 상관계수가 높은 순서쌍은 붉은색, 상관계수가 낮은 순서쌍은 푸른색으로 나타냈다. OBRA 결과 추적자 농도와 가장 상관관계가 높은 파장대는 = 649.72 nm, = 477.53 nm로 도출되었으며, 이때 결정계수는 R2 = 0.92였다. 이 두 밴드를 활용해 추적자농도를 도출하는 식은 Eq. (9)와 같이 산정되었으며, 초분광영상 전체에 적용한 결과는 Fig. 11(b)와 같으며, Fig. 9의 시계열 분광자료를 Fig. 11(b)에서 산정된 추적자의 농도로 정렬해본 결과(Fig. 11(d)) 추적자의 농도가 클수록 470~610 nm의 파장대에서 복사휘도 값의 변화폭이 큰 것을 확인할 수 있었다. 실측 추적자농도와 초분광영상으로부터 산출된 추적자농도는 Fig. 11(c)와 같이 비교할 수 있으며, 산출된 추적자농도의 RMSE는 17.79 ppb 이다.
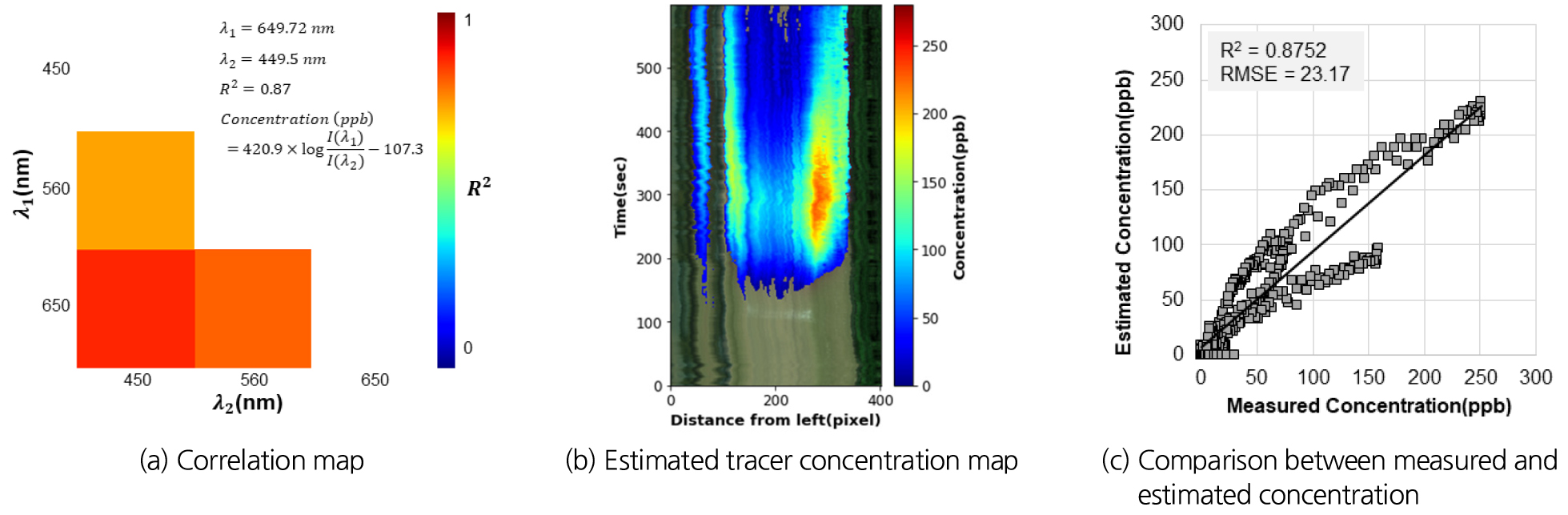
RGB영상도 초분광영상과 마찬가지로 최적 밴드 탐색 기법을 적용하여 추적자농도를 산출하였다. RGB영상은 3개의 파장대 밖에 존재하지 않으므로, 조합 가능한 3개의 순서쌍의 관계를 분석한 결과, Fig. 12(a)의 상관계수 맵이 도출되었으며, 추적자 농도와 가장 상관관계가 높은 파장대는 = 649.72 nm, = 449.5 nm로 도출되었으며, 이때 결정계수는 R2 = 0.87이였다. 이 두 밴드를 활용해 추적자농도를 도출하는 식은 Eq. (10)과 같이 산정되었으며, RGB영상 전체에 적용한 결과는 Fig. 12(b)와 같다. 실측 추적자농도와 초분광영상으로부터 산출된 추적자농도는 Fig. 12(c)와 같이 비교할 수 있으며, 산출된 추적자농도의 RMSE는 23.17 ppb 이다.
초분광영상과 RGB영상에서 각각 산출된 추적자 농도맵(Figs. 11(b) and 12(b))과 RGB영상(Fig. 7(a))을 함께 보면 약 200~380초의 우안에서 세 영상 모두 고농도의 추적자가 관측이 되지만, RGB영상을 활용한 맵핑 결과는 초분광영상을 활용한 맵핑 결과보다 다소 낮은 농도를 보였으며, 이로인해 농도곡선의 꼬리 부분의 농도가 산출되지 않는 문제점이 있었다.
Fig. 13는 추적자 실측 지점에서의 각 계측장비별 추적자 농도를 시간에 따라 도시화한 것이다. 실측 추적자 농도는 4초 간격으로 수집되어 측점별로 각각 150개의 자료가 수집되었으며, 영상을 활용해 산출된 추적자의 농도는 1초 단위의 영상을 촬영하여, 측점별로 각 600개의 농도가 산출되었다. 추적자의 실측 지점은 Fig. 6(c)에 나타낸 것과 같이 좌안의 M3지점, 하천 중앙의 M2지점, 우안의 M1지점에서의 실측 추적자 농도는 그래프의 In-situ로 도시하였으며, 초분광영상으로 산출된 추적자의 농도는 Estimated (HSI), RGB영상으로 산출된 추적자의 농도는 Estimated (RGB)로 도시하였다. 좌안의 경우(Fig. 13(a)) 실측된 추적자의 농도보다 영상으로부터 산출된 추적자 농도가 다소 낮게 나타났으며, 하천 중앙의 경우(Fig. 13(b)) 좌안과는 반대로 실측된 추적자의 농도가 다른 두 산출 농도보다 다소 높게 나타났다. 또한, 하상형태(Fig. 10)의 특성에 따라 주흐름이 발생하는 우안은 M1, M2, M3 세 지점 중 추적자농도가 가장 높게 나타났으며, 이 경우에는 산출된 농도의 정확도가 높게 나타났다. 추적자가 고농도로 유하된 우안의 경우 RGB영상에서 추적자의 농도 산출 정확도가 떨어지는 것을 확인 할 수 있다. 측점과 농도에 따라 측정값과 산출된 농도의 편차가 있는 것으로 보이지만, 산출된 농도장의 형태는 측정 농도장의 형태와 유사하게 나타났다.
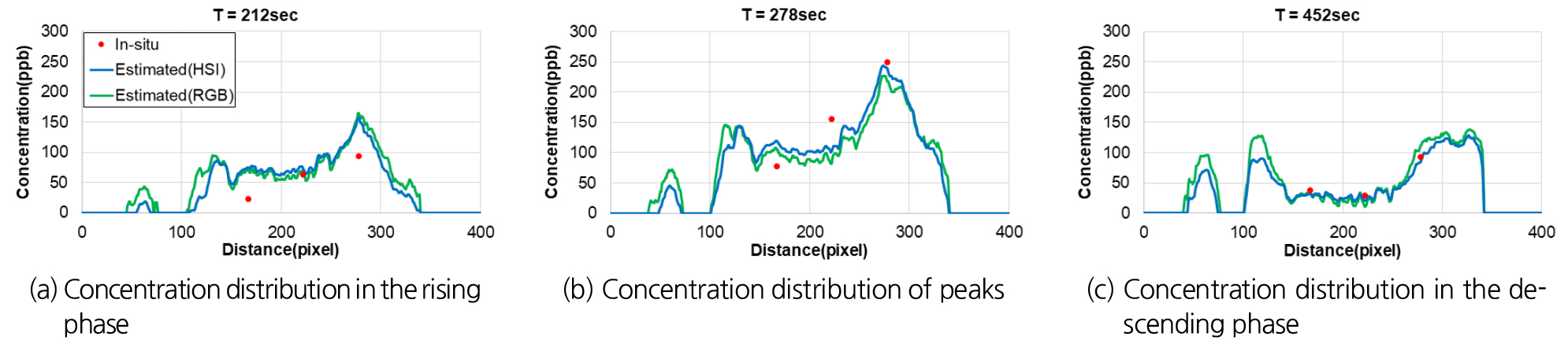
횡단면에서 시기별 농도 분포를 살펴보면, 추적자 농도 실측은 3지점에서 이루어졌으며, 초분광영상과 RGB영상을 통한 추적자 농도 산출은 약 250 지점(pixel)에서 이루어졌다. 농도곡선의 상승기에 해당하는 212초(Fig. 14(a)), 피크에 해당하는 278초(Fig. 14(b)), 하강기에 해당하는 482초(Fig. 14(c))의 횡단면 농도장을 함께 살펴보면, 상승기와 피크에서 실측 추적자 농도와 산출된 추적자 농도 간의 격차가 있지만, 그 분포의 형태는 유사한 것으로 확인이 되었으며, 특히 RGB영상으로 산출한 추적자의 농도 보다 초분광영상으로 산출한 추적자의 농도가 실측 농도와 더 정확도가 높은 것으로 나타났다.
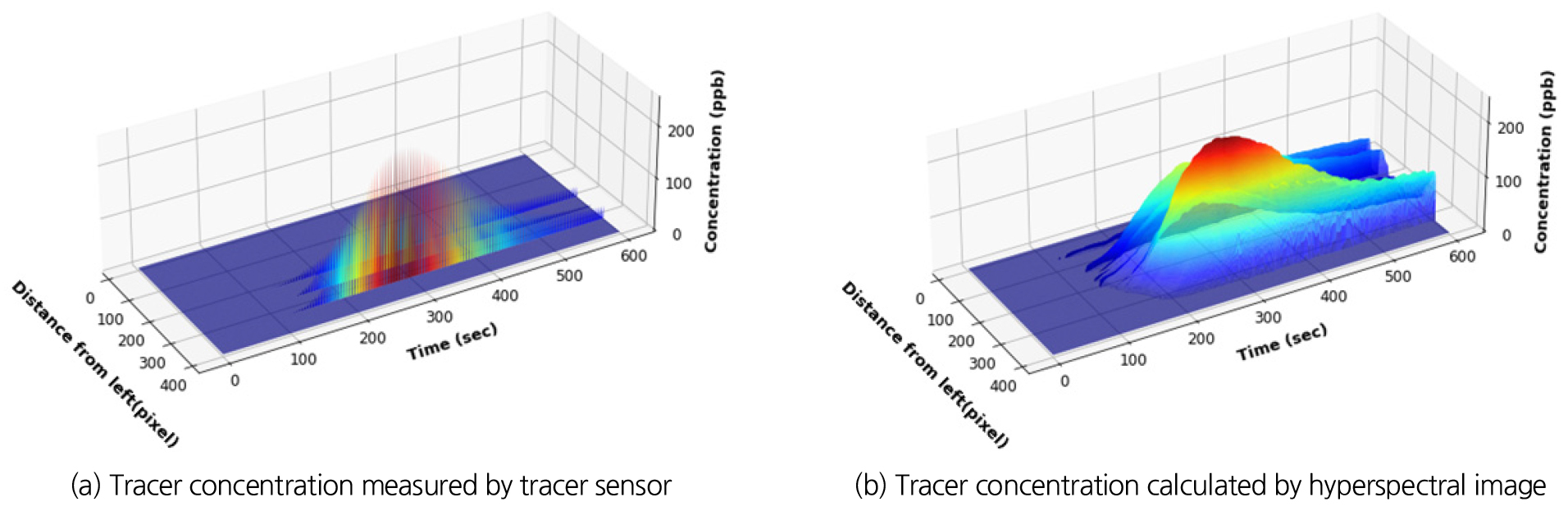
상기 도시된 실측 추적자 농도곡선과 초분광영상으로부터 산출된 추적자 농도곡선을 3차원으로 도시화한 결과(Fig. 15), 실측 농도는 4초 간격, 3지점 측정, 초분광영상은 1초 간격, 약 250지점 측정으로 시간적, 공간적 해상도를 대폭 상승시킬 수 있었으며 초분광영상의 경우 미계측 시점, 지점의 추적자 농도까지 산출해 낼 수 있었다.

3.4 분산계수 산정 결과
본 연구에서는 초분광영상 촬영 플랫폼인 드론의 비행시간 및 가용수량의 한계로 인해 모든 측선에 대한 전체 농도장을 확보하는 것이 어려워 주입점에서부터 Section 1까지의 분산계수만 산정이 가능했다. 단순모멘트법의 산정법에 따라 추적자 농도 실측 분산계수는 농도 측정 지점을 기준으로 3지점, 4구간으로 계산하였으며, 초분광영상 및 RGB영상으로 산출한 분산계수는 산출 가능한 농도장이 횡단면 전구간이기 때문에, 계산에 필요한 실측 수리량 자료가 있는 50지점, 51구간으로 계산하였다. 횡분산계수의 무차원화를 위해 를 적용하였으며, 계산된 무차원 횡분산계수 DT/HU*는 추적자 센서로 측정된 농도를 사용한 경우 0.55, RGB영상을 이용해 산출한 농도를 사용한 경우 0.60, 초분광영상을 이용해 산출한 농도를 사용한 경우 0.61로 계산되었다(Table 2).
4. 결론 및 향후연구
본 연구에서는 현 기술수준에서 가장 많이 사용되고 있는 라인스캐닝 방식의 초분광센서를 기존 사용법인 특정 시점의 초분광맵을 구축하는 방식에서 벗어나 특정 측선을 지속적으로 측정하는 시공간 초분광영상을 구축하여 특정 인자의 물리량 변화를 확인하고자 하였다. 기존의 초분광맵 구축은 비교적 광범위한 범위의 초분광 데이터큐브를 생성할 수 있는 장점이 있지만, 라인스캐닝 센서의 특성상 기하보정 및 영상정합의 과정을 거쳐야 하는 단점이 있다. 반면, 본 연구에서 적용한 시공간 초분광영상은 공간적으로 매우 좁은 지역을 모니터링 한다는 단점이 있지만, 영상촬영 후보정 작업이 필요없다는 점, 기존 점계측 센서와는 달리 한 측선에서 다수의 자료를 지속적으로 취득할 수 있다는 장점이 있다. 따라서 본 연구에서 기존 점계측 방법으로는 접촉식 센서로 횡단면 중 3점에서 계측이 가능했지만, 초분광영상을 활용한 경우 총 250점에서 계측이 가능해 하폭방향으로 월등히 높은 해상도의 농도장을 취득할 수 있어 수치분석시 오차를 줄여 더 정확한 분산계수 산정이 가능한 것으로 판단했다. 추적자 실험 수행시 본 연구의 대상단면인 Section 1 외에 Section 2~4에서도 동일하게 단면별로 3지점에 센서를 설치했었지만 그 중 2개의 센서의 오작동으로 농도장 획득이 불가하였고, 실측 농도의 공간해상도는 더 축소되었다. 반면 초분광센서의 경우 모든 단면에서 200지점 이상의 농도장을 구축할 수 있었지만, 운용플랫폼인 드론 비행시간의 제한으로 추적자가 유하하는 전체시간의 초분광영상을 획득하지 못한 한계가 있었다. 촬영된 초분광영상을 이용해 추적자 농도를 산출한 결과, 초분광영상으로부터 산출한 추적자 농도는 R2 = 0.9264, RMSE = 17.79, RGB영상으로부터 산출한 추적자 농도는 R2 = 0.8799, RMSE = 23.27를 나타내 초분광영상을 활용한 추적자 농도산출이 더 높은 정확도를 보였다. RGB영상을 활용한 추적자농도 산출은 기존연구(Baek et al., 2019)와 유사한 수준의 결정계수를 나타냈으며, 초분광영상의 경우 그보다 더 나은 결정계수를 나타냈다. 또한, 각 농도장 산출법을 이용한 무차원 횡분산계수 산정 결과는 Table 2와 같이 나타나 Rutherford (1994)의 횡분산계수 범위 0.3~3.0을 만족하였다.
본 연구에서는 수계에 영향이 없으며, 육안으로 뚜렷히 구분이 가능하여 추적자로 널리 사용되어온 Rhodamine WT를 이용했지만, 시공간 초분광영상에서 부유사 농도의 변화를 감지한 사례(Kwon et al., 2022)를 활용해 부유사를 자연추적자로 이용하여 분산계수 산정이 가능할 것으로 보인다. 또한, 추적자의 농도 뿐만 아니라 분산계수 산정에 필요한 수심 역시 현재 기술로 초분광영상을 활용한 산정이 가능하며, 유속산정 기술까지 개발된다면 본 연구보다 더 정확도 높은 분산계수 산정이 가능할 것으로 기대된다.
시공간 초분광영상 촬영 시스템에서 드론 플랫폼의 한계를 극복하기 위해서는 교량과 같은 하천구조물에 초분광센서를 고정식으로 설치하고 지속적으로 전력을 공급하여 CCTV 형식으로 활용하는 방법이 있으며, 이러한 방식을 이용해 공단, 하·폐수 처리장과 같은 점오염원 밀집지역에 적용하여 수계로 유출되는 각종 오염물질의 감지가 가능할 것으로 판단되며, 오염물질 뿐만 아니라 조류, 부유사 등의 다양한 수질항목의 농도 변화와 수심조사 기법의 적용으로 하상변동 감지가 가능할 것으로 판단된다.
