

1. 서 론
2. 연구 지역 및 연구 자료
2.1 연구 지역
2.2 연구 자료
3. 연구 방법
3.1 수체탐지 및 성능평가
3.2 수위 산정 알고리즘
4. 연구 결과 및 고찰
4.1 Confusion matrix 기반 수체 탐지 성능 결과
4.2 현장 관측 자료 기반 수체 탐지 성능 결과
4.3 수체 탐지 기반 저수위 및 저수량 산정 알고리즘
5. 결 론
1. 서 론
홍수와 가뭄은 수문 순환 불균형, 특히 강우의 시·공간적 편중에 의해 발생하는 대표적인 극한 사상이다(Yang et al., 2021). 홍수는 단기간의 집중 강우로 유역의 저류 용량이 초과되면서 유출량이 급증할 때 발생하며, 가뭄은 장기간 강수 결핍에 의해 유역 저류량이 감소함에 따라 발생한다(Zhang et al., 2021). 두 극한 수문 사상은 모두 강우 분포 특성과 지속성에 의존한다. 최근 기후 변화로 인한 강우 패턴의 변동성 증가는 국지성 집중호우 및 장기 가뭄의 발생 빈도를 증가시키고 있으며(Brunner, 2023), 국내에서도 2022년 광주·전남 지역의 장기 가뭄, 2023년 충청북도 괴산댐 월류, 2025년 강원도 강릉 지역의 상수 공급 제한 사례 등은 극한 수문 사상 대응을 위한 보다 정밀하고 체계적인 수문 모니터링 체계의 필요성이 요구된다.
댐은 홍수기 방류량 조절을 통해 하류 지역 홍수 위험을 저감하고, 갈수기에는 저장된 수자원을 활용하여 안정적인 용수 공급을 담당하는 중요한 역할을 수행한다(Nakamura and Shimatani, 2021). 이러한 기능을 효과적으로 수행하기 위해서는 댐 호소의 수체 및 수위 변동을 지속적이고 정확하게 파악하는 것이 필수적이며, 이는 저수지 수문 상태에 대한 신뢰성 있는 모니터링과 효율적인 댐 운영의 기반이 되기 때문이다(Yang et al., 2017). 그러나 현재 국내 댐의 수위 관측 및 모니터링 체계는 주로 수문 인근에 설치된 지점 관측소의 계측 자료에 의존하고 있어, 호소 전역의 공간적 수문 변동성을 충분히 반영하는 데 한계가 있다(Hayes et al., 2012). 특히 호소의 면적이 광범위하거나 수체 경계가 복잡한 경우, 단일 지점 수위 정보만으로 호소 전반의 수체 분포 및 면적 변화를 정밀하게 파악하기 어렵다. 이로 인해 수체 면적 변화의 정량적 분석이 제한되며, 저수지 수문 특성을 공간적으로 종합 분석하는데 어려움이 발생한다(Bonnema et al., 2022).
이러한 지점 기반 관측의 공간적 한계를 극복하기 위한 대안으로 위성 기반 원격탐사 기술이 수자원 모니터링 분야에서 주목받고 있다(Khan et al., 2024). 원격탐사는 광범위한 지역을 주기적으로 관측할 수 있어 지점 관측이 가지는 공간적 제약을 효과적으로 완화할 수 있다(Sharma et al., 2024). 다양한 위성 중 광학 위성은 다중 분광 정보를 활용한 수체 탐지에 유리하나, 구름 및 기상 조건에 민감하다는 제약이 있다. 반면, 전자기파 위성 중 능동형 센서를 탑재한 레이더는 주·야간 및 기상 조건과 무관하게 관측이 가능하므로 안정적인 시계열 기반 수문 모니터링에 적합하다(Räsänen et al., 2022; Panda et al., 2024). 이러한 특성에 기반하여 최근 Sentinel-1 Synthetic Aperture Radar (SAR) 영상을 활용한 수체 탐지 및 수문 모니터링 연구가 활발히 수행되고 있다(Alonso-Sarria et al., 2025; Breznik et al., 2025).
Shen et al. (2022)은 중국의 Poyang호를 대상으로 Sentinel -1 장기 시계열(2014-2021) 자료를 구축하고, U-Net 기반 수체 분류를 통해 10 m 해상도의 수체 지도를 산정하여 홍수기·갈수기 수체 면적의 변동을 정량화하였다. 또한 수체 면적-수위 관계에서 높은 상관관계(R = 0.92)를 보여주며, 경험식을 이용한 수위 추정 가능성을 제시하였다. Lee et al. (2024)은 Sentinel-1 SAR에서 수체 경계를 검출한 후, 신뢰도가 높은 경계 픽셀의 고도를 가중 평균하여 수위 변화를 정밀하게 추정하는 모델을 제안하였으며, 다수의 국내 저수지·하천에서 현장 수위와의 비교 검증을 통해 약 0.5 m 수준의 Mean Absolute Error (MAE)를 보고하였다. 이러한 선행연구들은 SAR 기반 수체 탐지 기법이 광범위한 수문 환경에서 수체 변동성을 효과적으로 포착할 수 있으며, 수체 면적-수위 관계를 활용한 수위 산정이 실질적으로 가능함을 제시하였다. 그러나 기존 선행 연구들은 다중 댐 호소에 대한 구체적인 분석이 충분히 이루어지지 않아, 제안된 방법의 댐 호소 전반에 대한 적용성을 충분히 검증하는 데 한계가 있다. 또한, 다수의 저수지를 대상으로 한 연구의 경우에도, 제한된 기간의 검증에 초점을 두어 장기 시계열적 분석의 안정성 및 일관성 평가가 부족하였다. 더 나아가, 선행 연구들은 수위 산정 및 평가에 초점을 두었으며, 수체 탐지 및 수위 산정의 유기적인 결합이 대체적으로 결여되어 있다.
이에 본 연구에서는 기존 선행연구의 한계와 단점을 보완하기 위해 다음 사항을 고려하여 연구를 수행하였다. 첫째, 영산강 유역 내 다수의 댐 호소를 대상으로 동일한 분석 절차를 적용하여 Sentinel-1 SAR 위성 기반 수체 탐지 및 저수위 산정을 수행하였다. 둘째, Sentinel-1 장기 시계열 자료와 실측 저수위 자료를 연계하여 장기간 저수위 변동의 지속적인 모니터링 가능성을 평가하였다. 셋째, 수체 탐지 결과가 저수위 산정 정확도에 미치는 영향을 함께 고려하기 위해, K-means Clustering과 Otsu Thresholding 기법 기반 수체 탐지 성능과 Random Forest 기반 저수위 추정 성능을 연계하여 분석함으로써 두 인자 간의 관계를 정량적으로 규명하고자 하였다.
2. 연구 지역 및 연구 자료
2.1 연구 지역
본 연구는 한반도 서남부에 위치한 영산강 유역(34.70-35.50°N, 126.40-127.10°E)을 대상으로 수행되었다(Fig. 1). 영산강 유역의 면적은 약 3,468 km2로, 광주광역시를 포함한 인구 밀집 지역과 농업·산업 지역이 혼재된 유역이다. 유역의 평균 고도는 약 119 m로 전반적으로 지형 경사가 완만하며, 상류에는 산림지역, 중류에는 농업지역, 하류에는 도시화 지역이 주로 분포한다. 토지피복은 산림지역(53.83%)과 농업지역(31.27%)이 유역의 85% 이상을 차지하고, 시가화지역은 7.78%로 나타났다(Lee et al., 2021). 이러한 토지이용 및 토지피복 특성은 강우 시 유출 특성과 저수지 수체 면적 변화에 주요한 결정 요인 중 하나로 작용한다.
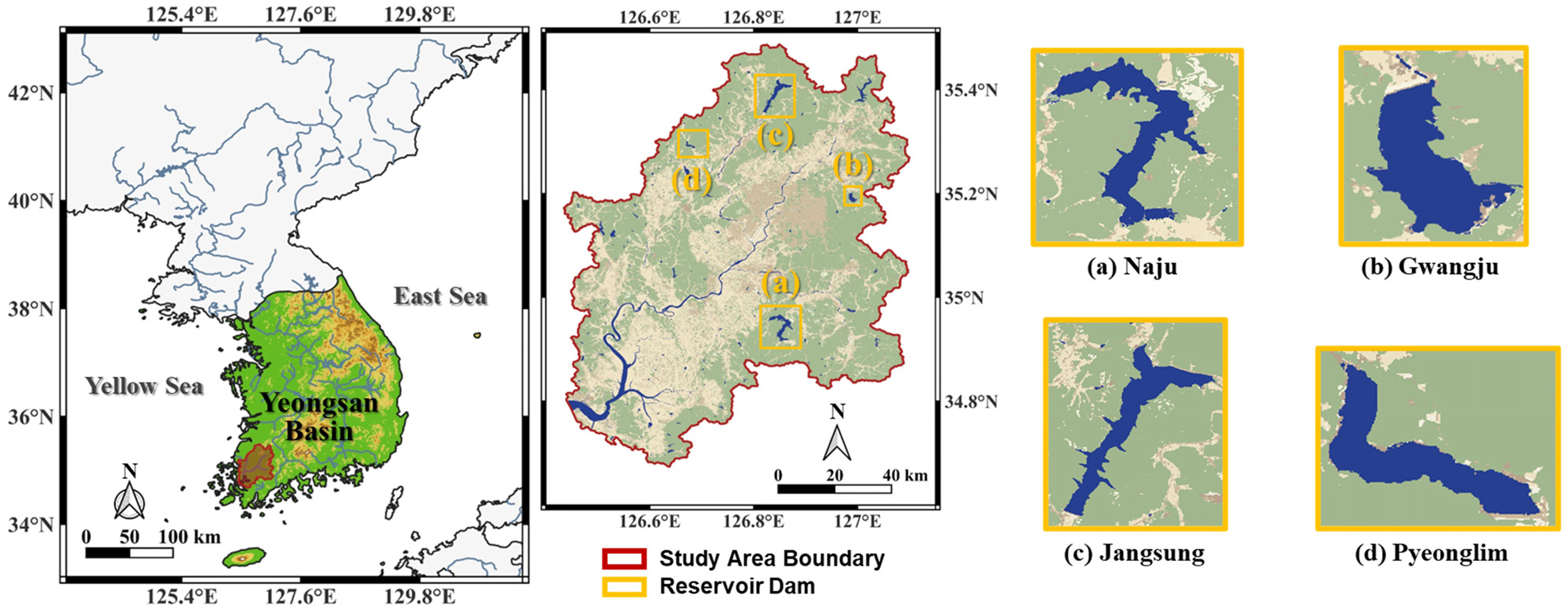
영산강 유역은 온대 몬순 기후권에 위치하며, 2020년 기준 연평균 강수량은 약 1,300-1,400 mm로, 연강수량의 약 70-80%가 5-10월(홍수기)에 집중되어 여름철 집중호우 및 태풍의 영향을 빈번히 받는다(ME, 2020). 유역 내에는 광주댐, 나주댐, 장성댐 및 평림댐이 분포하고 있으며, 이들 댐은 유역 내 생활·농업·공업용수 공급을 주요 기능으로 수행한다. 본 연구에서는 Sentinel-1 SAR 기반 수체 탐지 및 저수위 산정 기법의 적용 가능성을 평가하기 위해, 영산강 유역 내 주요 댐 호소 중 분석 기간 동안 실측 저수위 및 저수량 자료가 연속적으로 확보된 지점을 대상으로 하였다. 또한 저수면적 규모 차이에 따른 모델 성능 비교가 가능하도록, 저수면적이 상대적으로 큰 나주댐과 장성댐, 그리고 저수면적이 작은 광주댐과 평림댐을 연구 대상으로 선정하였다(Table 1, Fig. 1).
Table 1.
List of Reservoir observation stations in the study area
2.2 연구 자료
본 연구에서는 Sentinel-1 SAR 영상, HLS 광학 위성 자료, Esri Sentinel-2 Land Cover 자료, 그리고 RAWRIS 실측 저수위·저수량 자료를 활용하여 수체 탐지 및 저수위·저수량 산정 기법을 구축하였다. Sentinel-1 SAR 자료는 수체 탐지 및 수체면적 산정에 사용되었으며, HLS 광학 자료와 Esri Sentinel-2 Land Cover 자료는 SAR 기반 수체 탐지 결과의 검증을 위한 참조 자료로 활용되었다. 또한 RAWRIS 수위 실측 자료는 모델 학습 및 성능 평가를 위한 기준 자료로 사용되었다. 각 자료의 주요 특성은 Table 2에 요약하였다.
Table 2.
Summary of datasets used in this study
2.2.1 댐 호소의 저수위 및 저수량 자료
본 연구에서는 위성 기반 수체 탐지 및 저수위 산정 기법의 검증을 위해 농촌용수종합관리시스템(Rural Agricultural Water Resource Information System; RAWRIS, https://rawris.ekr.or.kr)에서 제공하는 실측 저수위 및 저수량 자료를 활용하였다. 연구 대상 지역인 나주댐, 광주댐, 장성댐, 평림댐에 대해 2021년부터 2024년까지의 일 단위 저수위 및 저수량 시계열 자료를 수집하였으며, 수집된 실측 저수위 및 저수량 자료는 Sentinel-1 SAR 영상으로부터 산정된 수체 면적과의 비교·분석에 활용되었다. 이를 통해 위성 기반 수체 탐지 결과가 실제 댐 호소의 저수 변동 특성을 어느 정도 반영하는지를 정량적으로 평가하였다. 또한 해당 자료는 본 연구에서 구축한 머신러닝 기반 저수위 산정 모델의 학습 및 성능 검증을 위한 참조 자료로 활용되었다. 실측 저수위 및 저수량 자료에 대해서는 interquartile range (IQR) 기반 이상치 검출을 적용하여 이를 제거한 후의 분석을 수행하였다.
2.2.2 Sentinel-1A/B
Sentinel-1A와 Sentinel-1B는 유럽우주국(European Space Agency, ESA)에서 각각 2014년과 2016년에 발사된 C-band SAR 위성으로, 중심 주파수는 5.405 GHz이며 Interferometric Wide Swath (IW) 모드에서 약 10 × 10 m 공간해상도의 Level-1 Ground Range Detected (GRD) 영상을 제공한다(Potin et al., 2022a). 두 위성은 약 180°의 궤도 위상차를 두고 운용되어 약 6일 간격의 재방문 주기를 제공하였으나, 2021년 말 Sentinel-1B의 전력 공급 문제로 임무가 중단되면서 Sentinel-1A 단독 운영 체계로 전환되었고, 이에 따라 재방문 주기는 약 12일로 증가하였다(Potin et al., 2022b). 이후 2024년 12월 Sentinel-1C가 발사되어 Sentinel-1A와의 병행 운용이 가능해짐에 따라 재방문 주기는 다시 약 6일 수준으로 회복되었다.
본 연구에서는 2021년부터 2024년까지 취득된 Sentinel-1A 및 Sentinel-1B SAR 영상을 수집하였으며, 연구 대상 유역을 포함하는 총 142장의 SAR 영상을 분석에 활용하였다. Sentinel-1 SAR 자료는 VV (Vertical-Vertical) 및 VH (Vertical-Horizontal) 이중 편파 후방산란계수(σ0)를 제공하며, 본 연구에서는 수체 탐지 및 수위 변동 분석을 위해 두 편파 자료를 모두 활용하였다. 또한, 본 연구에서 사용한 Sentinel-1 SAR 자료는 NASA Alaska Satellite Facility Distributed Active Archive Center (ASF DAAC)(https://search.asf.alaska.edu)을 통해 수득하였다.
SAR 영상의 전처리는 ESA에서 제공하는 Sentinel Application Platform (SNAP)을 이용하여 수행하였다. 전처리 과정은 궤도 보정(orbit correction), 열잡음 제거(thermal noise removal), 방사 보정(radiometric calibration), 스펙클 필터링(5×5 Lee filter; Lee et al., 1994), 지형 보정(terrain correction; SRTM 3 arc-second DEM), dB 단위 변환 순으로 진행하였다(Filipponi, 2019). 이러한 전처리 과정을 통해 SAR 영상의 기하학적 왜곡과 잡음을 최소화하고, 수체 면적 산정 및 시계열 수위 분석 결과의 신뢰성을 확보하고자 하였다(Navacchi et al., 2022).
2.2.3 Harmonized Landsat and Sentinel-2(HLS)
본 연구에서는 Sentinel-1 SAR 기반 수체 탐지 결과의 공간 분포를 검증하기 위한 참조자료로 Harmonized Landsat and Sentinel-2(HLS) Version 2.0 광학 위성 자료를 활용하였다. HLS 자료는 미국 항공우주국(National Aeronautics and Space Administration, NASA)과 유럽우주국이 공동으로 개발한 통합 광학 자료로, Landsat-8/9의 Operational Land Imager (OLI)와 Sentinel-2A/B의 Multi-Spectral Instrument (MSI) 관측 영상을 분광 및 기하학적으로 보정·정합하여 약 30m의 공간해상도와 3-5일 수준의 시간 해상도를 제공한다(Wulder et al., 2021).
본 연구에서는 2021년부터 2024년까지의 HLS 자료를 NASA Application for Extracting and Exploring Analysis Ready Samples (AppEEARS, https://appeears.earthdatacloud.nasa.gov) 플랫폼을 통해 획득하였다. 분석에는 Sentinel-1 SAR 영상과 관측 시점이 일치하며, cloud cover가 0%인 영상만을 선별하여 사용하였으며, 구름 조건에 따라 확보 가능한 자료 수는 지역별로 상이하였다. 그 결과 나주댐 33개, 광주댐 78개, 장성댐 25개, 평림댐 90개의 자료를 각각 분석에 사용하였다. 수체 탐지를 위해 Normalized Difference Water Index (NDWI; McFeeters, 1996)와 Modified Normalized Difference Water Index (MNDWI; Xu, 2006)를 적용하였다(Eqs. (1) and (2)). 이때 NDWI는 HLS 자료의 녹색 영역과 근적외선 영역(Near-Infrared, NIR) 밴드를 사용하였으며, MNDWI는 녹색 영역과 단파적외선 영역(Short-Wave Infrared, SWIR) 밴드를 활용하여 산정하였다(Mahmood et al., 2025; Tassew et al., 2025).
2.2.4 Esri Sentinel-2 Land Cover
본 연구에서는 Sentinel-1 및 HLS 위성 자료 기반 수체 탐지 성능을 검토하기 위한 참조 자료로 Esri Sentinel-2 Land Cover 자료를 활용하였다. 해당 자료는 ESA의 Sentinel-2 다중분광 위성 영상을 기반으로 제작된 전 지구적 LULC (Land Use/ Land Cover) 자료이며, 딥러닝 기반 분류 모델을 적용하고 연중 누적된 Sentinel-2 관측 자료를 활용하여 10 m 공간해상도로 제공한다(Karra et al., 2021). Esri Sentinel-2 Land Cover 데이터는 수체(Water), 산림(Trees), 침수 식생(Flooded vegetation), 농경지(Crops), 시가화 지역(Built area), 나지(Bare ground), 적설·빙하(Snow/Ice), 구름(Clouds), 초지(Rangeland) 등 총 9개의 피복으로 분류한다(Kovačić, 2025). 이 중 수체(Water)는 연중 지속적으로 수체가 존재하는 지역을 대상으로 정의하였으며, 일시적ㆍ계절적 침수 지역은 포함하지 않는 특성을 갖는다.
3. 연구 방법
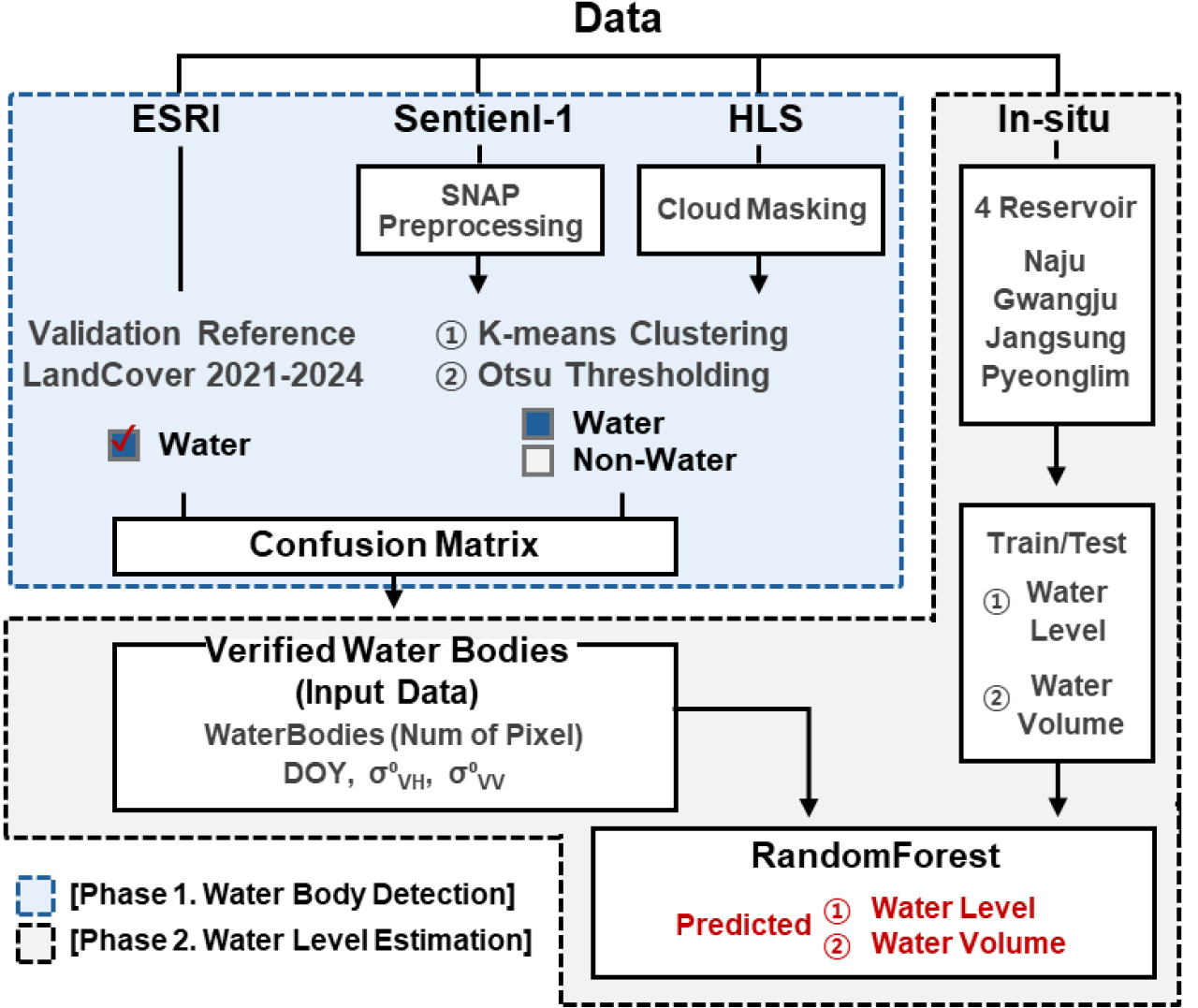
본 연구에서는 영산강 유역 내 주요 댐 호소를 대상으로 Sentinel-1 SAR 및 HLS 위성 자료를 활용하여 수체 탐지 및 수체 산출 정확도 검증을 수행한 후, 검증된 수체 정보를 핵심 입력 변수로 활용하여 저수위 및 저수량 산정 모델을 구축하였다. 본 연구 전반의 분석 절차는 Fig. 2에 제시하였다.
3.1 수체탐지 및 성능평가
3.1.1 수체 탐지 알고리즘
본 연구에서는 비지도 학습 기반의 군집 분류 알고리즘인 K-means clustering (MacQueen, 1967)과 히스토그램 기반의 이진 분류 기법인 Otsu thresholding (Otsu, 1979)을 적용하여 영산강 유역 내 4개 댐 호소의 수체 탐지를 수행하였다. K-means clustering은 데이터 간 유사성에 따라 전체 데이터를 K개의 군집으로 분류하는 비지도 학습 기반 알고리즘이며, Otsu thresholding은 영상 히스토그램 분포로부터 클래스 간 차이가 가장 뚜렷한 지점을 자동으로 산정하는 이진 분류 기법이다(MacQueen, 1967; Otsu, 1979).
이에 본 연구에서는 수체 탐지를 위해 SAR 영상에서 산출된 σ0VV 및 σ0VH 후방산란계수와 HLS 영상에서 산출된 NDWI 및 MNDWI 지수를 활용하였다. 일반적으로 σ0VV 및 σ0VH 후방산란계수는 수체에서 상대적으로 낮은 값을, 비수체에서 높은 값을 보이는 경향이 있으며, NDWI와 MNDWI는 -1에서 1의 범위를 갖는 정규화 지수로 수체에서 상대적으로 높은 값을 나타낸다. 이러한 특성을 고려하여 본 연구에서는 σ0VV 및 σ0VH, NDWI 및 MNDWI 각각에 대해 K-means clustering과 Otsu thresholding을 적용함으로써, 위성 자료별 데이터 분포 특성에 기반한 수체-비수체 이진 분류 결과를 도출하였다. 또한, HLS 위성과의 공간적 분포 비교 및 검증을 위해 Sentinel-1 SAR 및 Esri Sentinel-2 Land Cover 자료를 최근접이웃법(nearest neighbor interpolation) 방식을 통해 30 m의 공간해상도로 업스케일링(upscaling)하였다.
3.1.2 Confusion Matrix 기반 수체 탐지 성능 평가
수체 탐지 결과의 정량적 성능 비교를 수행하기 위해 Esri Sentinel-2 Land Cover의 수체(Water) 클래스를 참조자료로 사용하였다. 수체 탐지 성능 평가 confusion matrix 기반으로 수행하였으며, 이를 통해 Sentinel-1 및 HLS 자료 기반 수체 탐지 결과의 성능을 비교·분석하였다. Confusion matrix에서 True Positive (TP)는 두 자료 모두에서 해당 픽셀을 수체로 올바르게 분류한 경우를 의미하며, True Negative (TN)는 두 자료 모두에서 비수체로 올바르게 분류한 경우를 의미한다. False Positive (FP)는 탐지 결과가 실제 비수체 픽셀을 수체로 오분류된 사례를 의미하며, False Negative (FN)는 실제 수체 픽셀을 비수체로 잘못 분류한 경우로 정의된다. 또한, 수체 탐지의 결과는 정확도(Accuracy), 정밀도(Precision), 재현율(Recall), IoU (Intersection over Union)를 정량적 성능 평가 지표로 활용하였다(Eqs. (3), (4), (5), (6)). 이러한 지표는 참조 수체 영역 대비 탐지 수체 영역의 일치 정도와 함께 미탐지 및 오탐지 특성을 종합적으로 평가할 수 있다.
3.2 수위 산정 알고리즘
3.2.1 Random Forest (RF)
RF (Random Forest)는 무작위 표본과 특성 하위집합을 이용해 다수의 결정트리를 독립적으로 학습시키고, 이들의 예측 결과를 집계하여 최종 예측값을 산출하는 앙상블 학습 기법이다(Breiman, 2001). 이러한 구조를 통해 모델 변수들 사이의 복잡하고 비선형적인 상호작용을 효과적으로 학습함과 동시에, 과적합을 완화하고 이상치가 존재하더라도 안정적인 성능을 유지할 수 있어 수문·기상·환경 분야의 복잡한 예측 문제에 널리 활용되고 있다(Becker et al., 2023; Salman et al., 2024). 이에 본 연구에서는 수체 면적 기반 수위 산정을 목적으로 RF 회귀 모델을 구성하였으며, 입력 변수로는 Sentinel-1 위성 영상에서 추출한 후방산란계수(σ0VV, σ0VH)와 수체 면적(픽셀 단위) 및 관측일에 대한 연중일(Day of Year, DOY)을 사용하였다. 또한, Sentinel-1과 달리 관측 시차 및 결측 발생에 민감한 HLS 자료 기반 변수는 본 수위 산정 모델의 입력 변수에서 제외하였다. 본 모델의 종속 변수로는 RAWRIS에서 제공하는 일 단위 저수위 관측 자료를 활용하였다. 모델 학습에는 전체 데이터에서 학습(70%), 검증(10%), 테스트(20 %)로 분할하여 사용하였으며, 예측 모델의 성능을 평가하였다. RF 모델의 초매개변수(hyperparameter) 최적화에는 베이지안 최적화(Bayesian Optimization) 알고리즘을 사용하였으며 최대 200회의 반복 과정을 수행하였다. 최적화 과정에서 교차검증 기반 오차 값이 점진적으로 감소한 후 안정적으로 수렴하는 것을 확인하였다. 각 댐별 저수위 및 저수량 모델에 대해 최종 선정된 하이퍼파라미터는 Table 3에 정리하여 제시하였다.
Table 3.
Optimized hyperparameters of Random Forest models for water level and storage estimation
3.2.2 모델 평가 분석
RF 기반 수위 예측 모델의 예측 성능을 정량적으로 평가하고, 관측 수위와 예측 수위 간의 시계열적 경향성 및 모델의 신뢰성을 다각적으로 분석하기 위해 상관계수(Correlation Coefficient, R), 평균제곱근오차(Root Mean Square Error, RMSE), 평균절대오차(Mean Absolute Error, MAE), Index of Agreement (IOA)을 활용하였다(Eqs. (7), (8), (9), (10)). 이러한 지표들은 수문 및 환경 모델의 성능 검증에 널리 활용되는 지표로서, 모델의 예측 정확도뿐만 아니라 모델의 오차 및 데이터의 분포 특성을 종합적으로 평가할 수 있다. 여기서 O와 S는 각각 관측값(Observed value)과 모델 예측값(Simulated value)을 의미하며, 와 는 각각 관측값과 예측값의 평균을 나타낸다.
4. 연구 결과 및 고찰
4.1 Confusion matrix 기반 수체 탐지 성능 결과
Tables 4 and 5는 각각 Sentinel-1 SAR 및 HLS 자료에 대해 K-means Clustering과 Otsu Thresholding 기법을 적용한 수체 탐지 성능 평가 결과를 나타내며, 2021-2024년 기간 동안 4개 댐을 대상으로 산출된 평균 성능 지표를 함께 제시한다.
SAR 위성 기반 수체 탐지 결과, K-means clustering 기법이 Otsu thresholding 기법에 비해 대부분의 연구 지역에서 더 우수한 탐지 성능을 보였다. 나주, 광주, 평림 지역에서는 두 기법 모두 0.95 이상의 높은 Accuracy를 나타냈으나, K-means clustering은 Recall과 IoU 측면에서 일관되게 더 높은 값을 기록하였다. 특히 장성 지역의 경우, Otsu thresholding 기법은 낮은 정밀도와 재현율을 보이며 수체 탐지 성능이 현저히 저하된 반면, K-means clustering은 정확도 0.97, 재현율 0.85, IoU 0.79로 크게 향상된 성능을 나타냈다(Table 4).
Table 4.
Water body detection performance of Sentinel-1 SAR evaluated using Esri Sentinel-2 land cover (2021–2024)
HLS 기반 수체 탐지에서도 K-means clustering 기법이 Otsu thresholding 기법에 비해 모든 연구 지역에서 현저히 우수한 성능을 보였다. 나주 지역에서는 두 기법 모두 높은 Accuracy를 보였으나, K-means Clustering은 Recall과 IoU에서 상대적으로 더 안정적인 성능을 나타냈다(Table 5). 또한, 광주, 장성, 평림 지역에서는 두 기법 간 성능 차이가 더욱 두드러졌다. Otsu thresholding 기법은 높은 Recall (0.86-0.88)을 보이는 반면, Precision이 0.13-0.63 수준으로 오탐지가 다수 나타나는 경향을 보였다. 이로 인해 IoU 역시 0.11-0.57 수준으로 제한되었다. 반면, K-means clustering은 모든 지역에서 높은 Accuracy, Precision, Recall을 동시에 보였으며, IoU 또한 0.69-0.86 범위로 크게 향상되었다(Table 5). 특히 장성 지역에서는 Otsu thresholding 대비 IoU가 약 6배 이상 증가하였다.
Table 5.
Water body detection performance of HLS evaluated using Esri Sentinel-2 land cover (2021–2024)
두 위성 자료에 대한 수체 탐지 기법을 비교한 결과, 전반적으로 K-means clustering 기법이 Otsu thresholding 기법보다 우수한 탐지 성능을 보였다. 이러한 성능 차이는 각 댐 호소의 수체 분포 특성뿐만 아니라, 수체 주변 토지피복 구성의 차이에서 기인한 것으로 판단된다. 2021-2024년 동안 연구 대상 4개 댐의 토지피복 구성 비율을 분석한 결과, 각 지역은 수체 비율뿐만 아니라 산림, 시가화 지역 등 주변 토지피복의 구성에서 뚜렷한 차이를 나타냈으며, 이러한 토지피복 구조적 차이는 Sentinel-1 SAR 및 HLS 기반 수체 탐지 성능 변화에 크게 기여하는 요인으로 작용하였다.
나주와 광주 지역은 수체 비율이 각각 약 17-21%와 29-30%로 비교적 높은 토지피복 구조를 보였다. 이로 인해 영상 내에서 수체 픽셀의 통계적 특성이 명확하게 형성되었으며, 수체와 주변 비수체 간의 물리적 특성 대비 또한 비교적 뚜렷하게 나타났다. SAR 자료에서는 수체 표면의 낮은 후방산란(σ0VV = -17 ~ -26 dB, σ0VH = -22 ~ -29 dB) 특성과 비수체의 상대적으로 높은 후방산란(σ0VV = -7 ~ -15 dB, σ0VH = -11 ~ -20 dB) 특성 간의 대비가 명확하게 형성되었고, HLS 자료에서는 수체가 NIR 및 SWIR 영역에서 강한 흡수 특성을 보임에 따라, NDWI는 -0.9 ~ -0.5, MNDWI는 -0.7 ~ -0.2 범위에 주로 분포하였다. 반면 비수체는 NDWI -0.6 ~ 0, MNDWI -0.6 ~ 0.1 범위를 나타내어 수체와 비수체 간 분광 대비가 명확하게 유지되었다. 이러한 조건에서는 단일 임계값 기반의 Otsu thresholding 기법 역시 안정적인 수체 탐지가 가능하여, 두 기법 모두 높은 정확도를 확보하였다.
그러나 산림 비율이 높은 장성 및 평림 지역에서는 수체 비율이 각각 약 11-12% 및 15-19%로 낮고, 산림 비율은 약 66-72% 이상을 차지하여 수체 주변 식생에 의한 혼합 픽셀 증가와 비수체 클래스의 분광·산란 특성 분산이 두드러졌다(Fig. 3). 이로 인해 단일 임계값 기반의 Otsu thresholding 기법은 장성 지역에서 정밀도 0.13, 재현율 0.26으로 매우 낮은 성능을 보였으며, 평림 지역에서도 오탐지가 증가하는 경향을 나타냈다. 반면 K-means clustering은 다차원 특성을 고려한 군집화를 통해 식생 혼재 환경에서도 수체를 안정적으로 분리하여 두 지역 모두에서 보다 안정적이고 일관된 탐지 성능을 확보하였다.
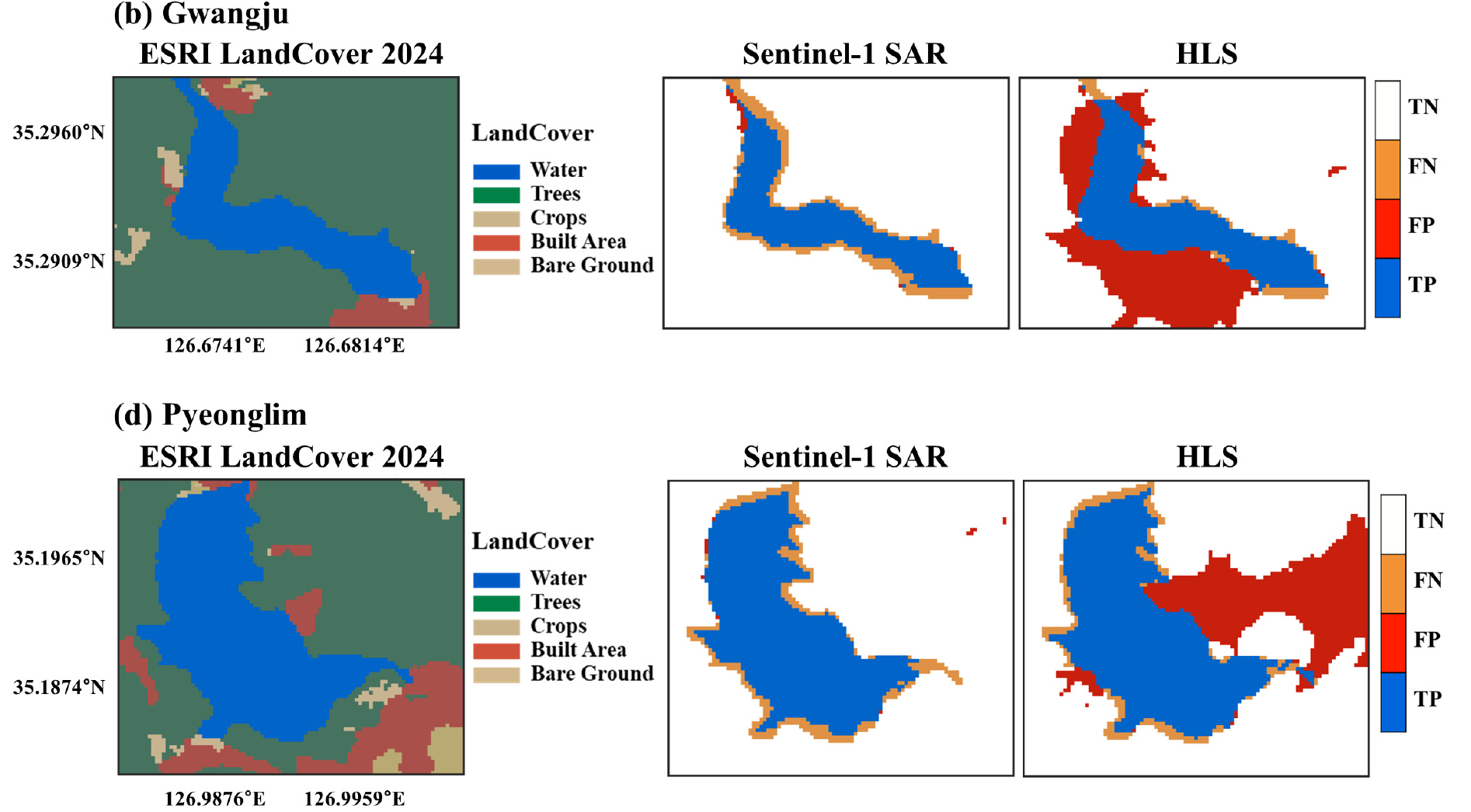
또한 두 위성 간 공간적 수체 탐지 성능을 비교하기 위해 Sentinel-1 SAR 및 HLS 자료로부터 도출된 수체 분포를 동일한 공간 범위에서 시각적으로 분석하였다(Fig. 3). 2024년 광주댐과 평림댐을 대상으로 Otsu thresholding 기법을 적용한 결과, Sentinel-1 SAR과 HLS 자료 간에 뚜렷한 수체 탐지 성능 차이가 확인되었다. SAR 기반 Otsu thresholding 결과는 두 지역 모두에서 수체와 비수체 간 대비가 뚜렷하게 나타나 수체의 핵심 영역과 경계부를 비교적 안정적으로 분류하였다. 다만 SAR 결과에서는 시가지, 경작지, 및 나지에서 수체가 비수체로 분류되는 미탐지가 상대적으로 빈번하게 나타났는데, 이는 해당 토지 피복에서의 표면 거칠기·산란 특성 및 수체-비수체 혼합 픽셀로 인해 후방산란 대비가 약화되었기 때문으로 해석된다. 반면, HLS 기반 결과에서는 수체 주변의 산림 및 나지 영역이 수체로 과대 탐지되는 현상이 빈번하게 관찰되었다. 이는 HLS 자료에서 수체와 산림 간 분광 특성이 부분적으로 중첩되고, 수체 경계부에서 혼합 픽셀 효과가 발생함에 따라 단일 임계값 기반 분류 기법의 한계가 두드러지기 때문으로 해석된다(Feyisa et al., 2014). 또한, 일반적으로 수체는 근적외선 및 단파적외선 영역에서 강한 흡수 특성을 보여 매우 낮은 반사도를 나타내지만, 산림 지역에서는 수관 구조에 따른 그림자 및 음영 효과로 인해 NIR 및 SWIR 반사도가 국지적으로 감소할 수 있다. 이로 인해 산림 내 일부 영역이 수체와 유사한 분광 특성을 나타내며, 결과적으로 HLS 기반 Otsu Thresholding에서 수체 오탐지가 증가하는 것으로 판단된다(Xu, 2006).
4.2 현장 관측 자료 기반 수체 탐지 성능 결과
본 절에서는 SAR 위성 기반 수체 탐지의 신뢰성을 보다 정량적으로 검증하기 위해, 앞선 산정된 Sentinel-1 SAR 기반 수체 면적(픽셀 수)을 실제 댐 호소의 현장 관측 자료(저수위, 저수량, 저수율)와 비교·분석하였다(Table 6). 또한, 각 변수들의 경향성을 직접적으로 비교하기 위해 정규화를 진행하였다.
Table 6.
R between SAR-derived water area and observed reservoir parameters
검증 결과, 모든 댐 호소에서 K-means Clustering 기법이 Otsu thresholding 기법보다 관측 자료와의 상관성이 전반적으로 높게 나타났다. 나주 지역에서는 K-means clustering 기반 수체 면적과 저수위 및 저수량 간 상관계수가 각각 0.97과 0.98로 매우 높은 값을 기록하였으며, Otsu thresholding 역시 높은 상관성을 보였으나 전반적으로 K-means clustering 대비 다소 낮은 값을 나타냈다. 광주 지역에서는 두 기법 모두 수체 면적과 수문 변수 간의 양의 상관관계를 보였으며, K-means clustering의 상관계수는 저수위 0.81, 저수량 0.84로 Otsu thresholding보다 상대적으로 높은 값을 기록하였다. 장성 지역에서도 K-means clustering 기반 수체 면적은 저수위 및 저수량과 각각 0.86, 0.89의 상관계수를 보여, Otsu thresholding 대비 향상된 성능을 나타냈다. 평림 지역에서는 K-means clustering 기법이 저수위 0.90, 저수량 0.91의 높은 상관계수를 기록하였으며, Otsu thresholding보다 전반적으로 우수한 결과를 보였다. 종합적으로, K-means clustering 기법은 모든 연구 지역에서 수체 면적과 수문 관측 자료 간의 상관성이 일관되게 높게 나타났다.
추가 분석을 위해, 각 지점별 저수위, 저수량, 저수율과 Sentinel-1 기반 수체 면적을 동일한 기간에 대해 시계열 그래프로 비교·분석하였다. Sentinel-1 SAR 기반 수체 면적 시계열과 지점 관측 자료를 비교한 결과, 모든 연구 지역에서 수체 면적 변화가 저수위 및 저수량의 장기적 변동 패턴을 안정적으로 따르는 것으로 나타났다(Fig. 4). 특히 갈수기와 홍수기 전환 시기에 나타나는 급격한 수위 저하 및 회복 구간이 SAR 기반 수체 면적 시계열에서도 명확하게 재현되었다.
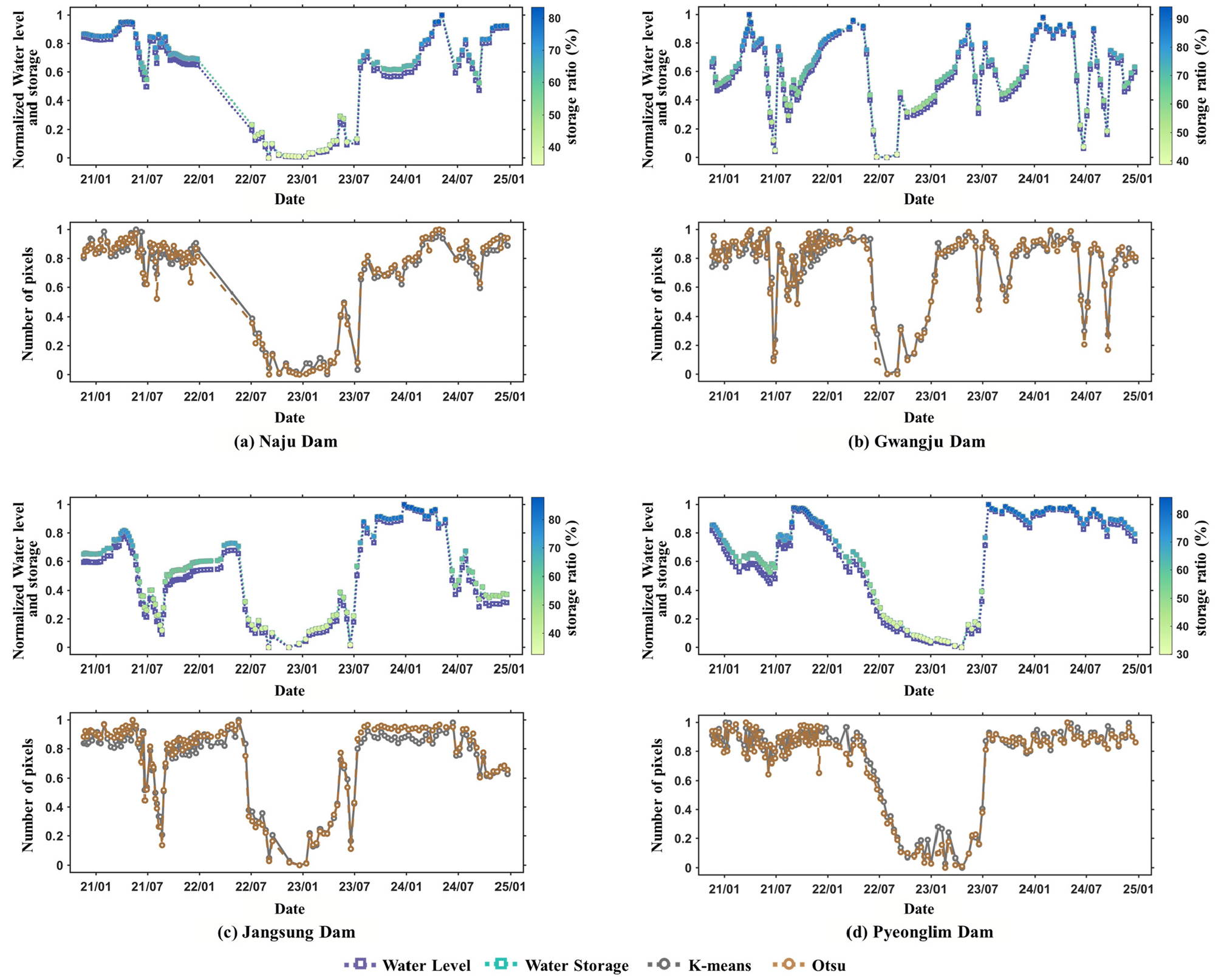
나주댐의 경우, Sentinel-1 SAR 기반 수체 면적은 저수위 및 저수량 변화와 매우 유사한 시계열 패턴을 보였으며, 전반적인 증감뿐만 아니라 단기적인 변동 또한 일관되게 반영되었다. 반면 광주댐과 장성댐에서는 수위 변동 폭이 큰 구간에서는 수체 면적이 유사한 증감 패턴을 보였으나, 수위가 소폭으로 증감하는 구간에서는 수체 면적 변화가 둔감하게 나타나 수위의 미세 변동에 따른 면적 변화 추적 성능이 상대적으로 저하되는 경향이 관찰되었다(Fig. 4(a)). 이는 수위의 미세 변동 구간에서는 실제 수체의 변동이 SAR 영상의 공간 해상도 수준보다 작아, 면적 변화가 영상 내에서 유의미하게 구분되지 못해 수체 면적 산정의 정확도가 저하된 것으로 해석된다. 그럼에도 수체 면적 시계열은 장기적인 증감 추세와 주요 전환 시점에서는 실측 수위 자료와 전반적으로 일치하는 양상을 보였다. 평림댐 역시 Sentinel-1 SAR 기반 수체 면적 시계열이 저수위 및 저수량의 장기 변화와 높은 일관성을 나타냈다(Fig 4(d)). 갈수기에는 수체 면적이 지속적으로 감소하고, 홍수기 진입 시 급격히 증가하는 패턴이 명확하게 관찰되었으며, 이러한 시계열적 특성은 실측 수문 자료와 거의 동일한 형태로 재현되었다. 따라서 Sentinel-1 기반 수체 면적 시계열은 실제 저수 변동의 장기 추세 및 계절 전환을 반영하는 유용한 지표로 활용될 수 있다.
4.3 수체 탐지 기반 저수위 및 저수량 산정 알고리즘
본 연구에서는 수체 탐지 결과로부터 산정된 수체 면적 정보를 핵심 입력 변수로 활용하고, Sentinel-1 SAR의 후방산란계수 특성을 함께 고려한 수체 탐지 기반 저수위 및 저수량 산정 알고리즘을 구축하여 저수위 및 저수량 산정 가능성을 평가하였다.
Table 7은 수체 탐지 기반 수위 산정 알고리즘의 성능을 각 댐별로 저수위 및 저수량에 대해 평가한 결과를 나타낸다. 수행된 분석에 따르면, 전체 연구 지역에서 저수위 및 저수량 추정에 대해 높은 상관계수(R = 0.85-0.97)와 낮은 오차 지표(RMSE 및 MAE)를 동시에 확보하여, 전반적으로 안정적인 추정 성능을 보였다. 특히 IOA는 모든 경우에서 0.91 이상으로 나타나, 위성 기반 추정 결과가 실측 수문 관측 자료와 높은 일치도를 보임을 확인하였다. 저수위 추정에서는 모든 댐에서 R 값이 0.85 이상으로 나타났으며 RMSE는 0.64-1.02 m 범위로 비교적 낮은 수준을 유지하였다. 저수량 추정 또한 높은 상관성을 보였으며(R = 0.88-0.96), 각 댐의 규모 차이를 고려하였을 때 RMSE 및 MAE 역시 안정적인 범위 내에서 분포하였다. 이러한 결과는 수체 면적을 핵심 변수로 활용한 Random Forest 기반 접근법이 다양한 저수지 조건에서 저수위 및 저수량을 신뢰성 있게 도출할 수 있을 것으로 판단된다.
Table 7.
Performance statistics of Random Forest based water level and storage estimates
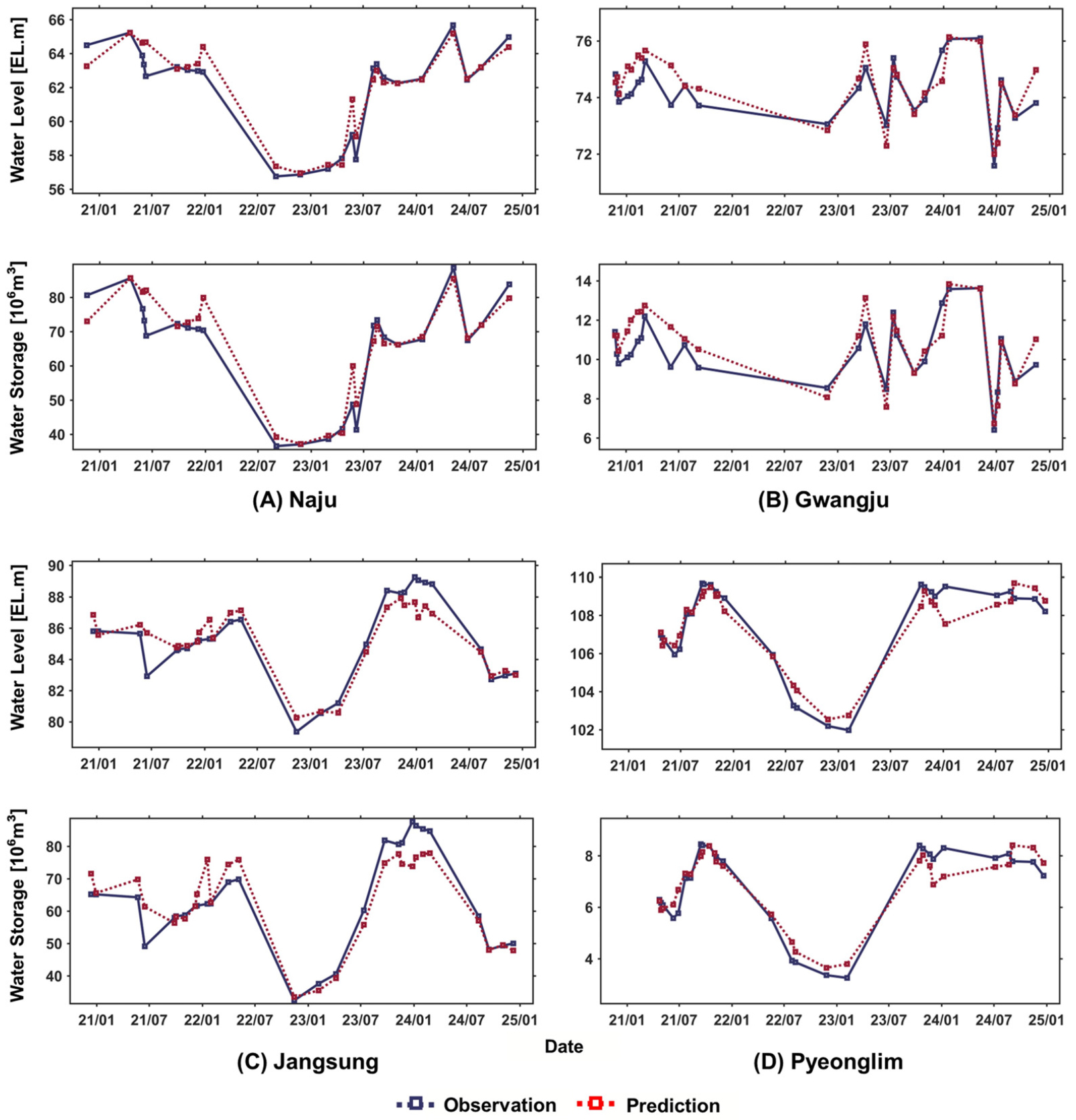
모델 예측 성능을 보다 직관적으로 평가하기 위해 실측값과 예측값의 시계열 비교 그래프를 제시하였다(Fig. 5).나주댐과 장성댐 모두 수위와 저수량에서 높은 상관성을 보였다(Figs. 5(a) and 5(c)). 나주댐의 RMSE는 수위 0.87 m, 저수량 5.33 m³로 낮았고, 장성댐의 수위 RMSE도 약 1.0 m, 저수량 6.03 m³수준으로 분석되어 예측 오차가 제한적이었다. 시계열 그래프에서도 예측값은 실측값의 증감 경향을 전반적으로 잘 모의하여, 두 댐의 수문 변동 특성이 안정적으로 재현됨을 확인하였다. 또한, 평림댐은 연구 대상 댐 중 가장 높은 예측 성능을 보였다(Fig. 5(d)). RMSE와 MAE 또한 가장 낮은 값을 나타내어, 수위 및 저수량의 시계열 변화를 매우 정확하게 재현하는 것으로 확인되었다. 반면, 광주댐은 다른 대상지에 비해 예측 결과의 정확성이 제한적인 성능을 보였다(Fig. 5(b)). 전반적인 수위 및 저수량의 장기적 변동 경향은 비교적 잘 재현되었으나, 2021년 1-7월 기간에는 단기적인 수위 및 저수량 변동을 충분히 반영하지 못하는 구간이 확인되었다. 이는 광주댐에서 수위가 소폭으로 빈번하게 증감하는 반면, 해당 기간 동안 실제 수체 면적 변화는 제한적이어서 Sentinel-1 기반 수체 면적 변화가 둔감하게 나타났기 때문으로 해석된다.
5. 결 론
본 연구는 Sentinel-1 SAR 및 HLS 위성 자료를 활용하여 수체 탐지 성능을 비교·분석하고, SAR 기반 수체 탐지 결과를 핵심 입력 변수로 활용한 Random Forest 기반 저수위 및 저수량 산정 알고리즘을 제안하였다. 이를 위해 2021-2024년 기간 동안 나주댐, 광주댐, 장성댐, 평림댐을 대상으로 다양한 토지피복 조건에서의 수체 탐지 정확도와 수문 변수 추정 성능을 종합적으로 평가하였다.
전반적인 수체탐지 결과, Sentinel-1 및 HLS 자료 모두 K-means clustering 기법이 Otsu thresholding 기법에 비해 전반적으로 우수한 수체 탐지 성능을 나타냈다. 특히 토지피복이 복잡하고 산림 비율이 높은 장성댐과 평림댐에서는 Otsu thresholding 기법의 한계가 뚜렷하게 나타난 반면, K-means clustering은 높은 정확도, 정밀도, 재현율 및 IoU를 동시에 확보하였다. 이는 단일 임계값 기반 기법이 혼합 픽셀과 분광·산란 특성 분산이 큰 환경에서 취약한 반면, 군집 기반 기법은 다차원 특성을 고려함으로써 보다 안정적인 수체 분리가 가능함을 시사한다.
또한, 위성 자료 간 비교에서는 Sentinel-1 SAR 자료가 HLS 자료에 비해 전반적으로 더 안정적이고 일관된 수체 탐지 성능을 보였다. SAR 자료는 기상 조건과 무관한 관측이 가능하며, 수체의 낮은 후방산란 특성으로 인해 수체-비수체 간 대비가 명확하게 유지되는 장점을 가진다. 반면, HLS 기반 Otsu thresholding 결과에서는 산림 음영 및 혼합 픽셀 영향으로 수체 오탐지가 증가하는 경향이 확인되었다. 이러한 결과는 복잡한 토지피복 환경에서 SAR 자료의 활용 가능성과 신뢰성을 뒷받침한다. Sentinel-1 SAR 기반 수체 면적 시계열을 통한 추가 검증을 수행한 결과 모든 연구 지역에서 저수위 및 저수량의 장기적 변동성과 계절적 패턴을 안정적으로 재현하였다. 특히 K-means clustering 기반 수체 면적은 모든 댐에서 저수위 및 저수량과 높은 상관성을 보였으며(R = 0.81-0.98), 이는 SAR 기반 수체 탐지 결과가 실제 저수 상태 변화를 효과적으로 반영할 수 있음을 의미한다.
수체 면적과 SAR 후방산란 특성을 결합한 Random Forest 기반 저수위 및 저수량 산정 알고리즘은 모든 연구 대상 댐에서 높은 예측 성능을 보였다(R = 0.85-0.97, IOA ≥ 0.91). 특히 나주댐과 평림댐에서는 수위 및 저수량 모두에서 매우 높은 상관성과 낮은 오차를 보였으며, 시계열 분석 결과에서도 모델 예측값이 실측값의 장기적 추세와 단기 변동을 안정적으로 추정하는 것으로 확인되었다. 반면 광주댐에서는 일부 시기에 예측 정확도가 다소 저하되었으나, 전반적인 장기 추세 재현 가능성을 확인하였다.
종합적으로 본 연구는 (1) Sentinel-1 위성 기반 수체 탐지의 신뢰성과 토지피복 복잡성에 따른 기법별 성능 차이를 정량적으로 규명하였으며, (2) Sentinel-1 기반 수체 면적 시계열이 저수지 수문 변동을 효과적으로 반영할 수 있음을 입증하고, (3) SAR 기반 수체 탐지 정보와 머신러닝 기법을 결합하여 저수위 및 저수량을 동시에 안정적으로 추정할 수 있는 방법론을 제시하였다. 다만, 본 연구에서 제안한 방법론은 Sentinel-1 SAR의 공간 해상도 및 시간 해상도의 제약으로 인해 급격한 수위 변동이나 단기적인 수문 변화를 정밀하게 포착하는 데에는 한계점이 존재한다. 또한, 수체-비수체 간 경계에서 발생하는 혼합 픽셀의 영향으로 인해, 저수면적이 매우 작은 저수지나 호소에 대해서는 적용성이 제한될 가능성이 있다.
이에 향후 연구에서는 Sentinel-1 SAR 자료와 더불어 추가적인 위성 자료를 도입함으로써 관측 주기에 따른 단기 수문 변화에 대한 대응력을 향상시키고, 수체-비수체 분류의 신뢰성 향상을 위해 Sentinel-1 SAR 자료 외 다양한 입력 변수(하천정보, 유역별 평균 강우량, 토양수분량, 증발산량 등)로 확장하고 분류 기법의 고도화를 모의하고자 한다. 또한 녹조 및 부유물질의 조건에 따른 SAR 기반 수체 탐지 성능을 정량적으로 평가하고, 다중 광학 위성 영상과의 비교를 통해 센서별 불확실성을 고려한 오탐지를 보완함으로써 위성 기반 댐 호소 및 저수지 수문 모니터링의 정확성과 신뢰성을 보다 효율적으로 개선할 수 있을 것으로 판단된다.
