

1. 서 론
2. 연구지역 및 데이터
2.1 연구지역
2.2 데이터
3. 방법론
3.1 비지도학습 기법: K-means clustering
3.2 검증 도구
4. 연구 결과 및 토의
4.1 광학/SAR 위성 밴드 별 데이터 분포 특성
4.2 단일영상 클러스터링 기법의 효율성 검토
4.3 영상 융합을 통한 정확도 향상 정도 평가
5. 결론 및 요약
1. 서 론
기후변화가 가속화됨에 따라, 전세계적으로 수자원에 대한 불확실성이 증가하고 가용수량은 부족해지고 있다(Vicente- Serrano et al., 2020). 특히 한반도에서는 강수량의 대부분이 여름철 집중되어 있어 수자원의 계절적 편중이 심하며, 이를 효과적으로 유지, 관리하기 위한 수단이 필수적이다. 농업용수가 전체 물 수요의 48%가량을 차지하고 있는 우리나라에서 농업용 저수지는 여름철 확보된 수량을 이듬해 봄까지 사용할 수 있도록 저장하는 핵심 구조물로서(Jeung et al., 2021), 효율적인 용수 관리를 위한 연속적인 모니터링이 필요하다. 농업용 저수지의 수량은 일반적으로 자동수위관측기를 설치하여 측정되나, 국내 약 17,000개소의 저수지 중 자동수위관측기가 설치된 저수지는 1,700여개에 그친다.
이처럼 국내 농업용 저수지의 역할이 중요함에도, 그 관리는 면밀히 수행되고 있지 않다. 특히 중소규모 저수지의 경우 자동수위관측기를 이용해 관측되는 저수지를 제외하면 실측자료가 미비한 실정이며, 이로 인해 최근 원격탐사 자료를 활용한 저수지 수체면적 및 수량 산정에 관한 연구가 국내외에서 활발히 수행되고 있다(Busker et al., 2019; Gao et al., 2012; Jang et al., 2011; Lee et al., 2019, 2020). 저수지 관측에 활용되는 위성자료는 크게 광학 위성 자료와 레이더 위성 자료로 나뉜다. 광학위성을 활용한 수체 탐지는 초기 가시영역대 영상과 근적외 영상을 활용한 Normalized Difference Water Index (NDWI) 지수를 활용하여 이루어져 왔으며(McFeeters, 1996), Xu (2005)의 연구에서는 단파 적외 영상을 이용한 Modified NDWI (MNDWI)를 제시하기도 하였다. 이후, Feyisa et al. (2014)는 수체 영역에 대한 보다 정밀한 관측을 위해 초분광 센서의 다양한 밴드를 활용하는 Automated Water Extraction Index (AWEI)를 제시하였다. 최근에는 고해상도의 광학위성과 초고해상도 드론 영상이 가용하여 수체와 지표면 간의 경계를 더욱 정확하게 구분하기 위한 연구가 수행되고 있다(Borse et al., 2021; Zhu et al., 2021). 2021년 3월 차세대중형위성 1호가 발사되어 고해상도 광학 영상에 대한 접근성이 높아짐에 따라 국내에서도 고해상도 영상에 대한 활용이 큰 관심사가 되고 있으나, 저수지 관측을 위한 연구는 제한적으로 이루어지고 있다.
광학위성자료 기반 지수(NDWI, MNDWI, AWEI 등)는 수체 영역 내 미탐지율이 매우 낮다는 강점이 있으나(Kaplan and Avdan, 2017), 구름을 포함한 기상 현상에 의한 간섭이 심하다는 한계점이 있다. 또한 초분광 센서와 같은 정교한 광학 센서를 탑재한 위성은 동일한 저수지를 관측하는 주기가 불규칙하여 연속적인 모니터링에 어려움이 있다. 이러한 한계점을 극복하기 위해 지표면, 수표면에 대한 전천후 관측이 가능한 Synthetic Aperture Radar (SAR) 영상을 활용한 연구 또한 다수 진행되어 왔다(Ferrentino et al., 2020; Jeong et al., 2021; Lee et al., 2022). SAR 영상 기반 수체 탐지는 수표면에서 발생하는 정반사에 의해 레이더로 복귀하는 산란 신호가 감쇠하는 물리적 특성을 이용한다(Martinis et al., 2015). SAR 영상은 비교적 연속적인 저수지 모니터링을 가능케 하나, 저수지 인근 짙은 수목에 의해 다중 산란이 일어날 시 복귀 신호의 감쇠로 인해 수체와 비수체의 경계에서 오탐지 및 미탐지가 발생하기 쉽다(Lee et al., 2022).
광학영상과 SAR 영상의 장단점을 상호 보완하기 위해 최근에는 두 종류의 영상을 함께 사용하는 연구들이 진행되고 있으나(Irwin et al., 2017; Kseňak et al., 2022), Boolean 연산자를 활용하여 단순히 수체 탐지 결과를 합성하거나(Bangira et al., 2019) 블랙박스 모형을 사용하여(Foroughnia et al., 2022) 보완적 작용에 대한 정량적 분석이 제한적으로 이루어졌다. 이에 본 연구에서는 광학위성 기반 NDWI 영상 및 SAR 단일 영상에 비지도학습 기법인 K-means 클러스터링 기법을 적용하여 수체를 탐지하고 NDWI-SAR 후방산란계수로 이루어진 2-D grid space에 동일 기법을 활용하여 정확도의 향상 정도를 정량적으로 파악하고자 하였으며, 이를 위해 국내 고해상도 위성인 차세대중형위성 1호(Compact Advanced Satellite 500-1, 이하 CAS500)와 다목적실용위성 3호 및 3A호(Kompsat-3/3A, 이하 K3/K3A), 그리고 유럽우주국(European Space Agency, ESA)의 Sentinel-2(이하 S2), SAR 탑재 위성인 Sentinel-1(이하 S1) 위성자료를 활용하였다.
2. 연구지역 및 데이터
2.1 연구지역
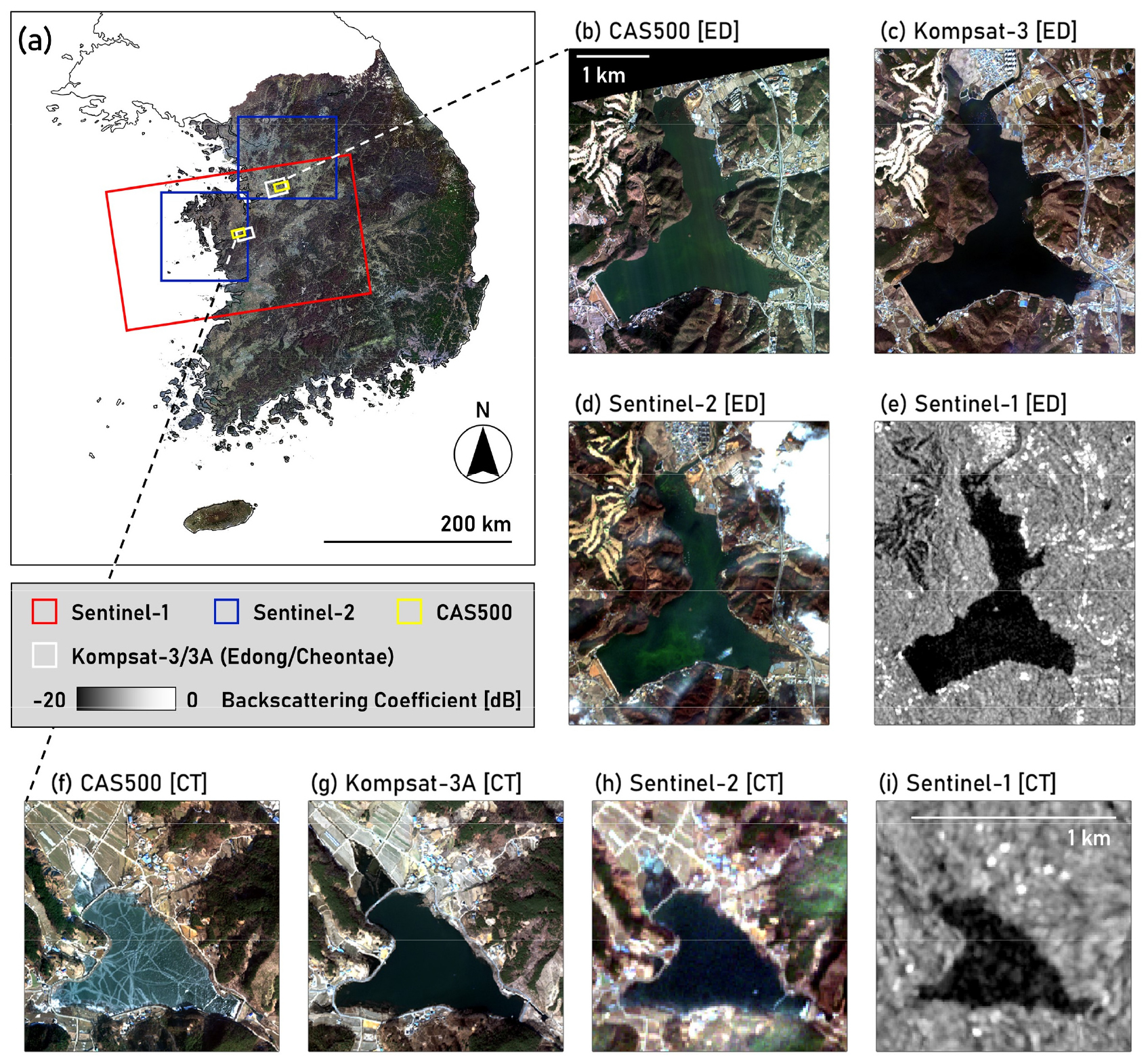
본 연구는 경기도 용인시의 이동저수지와 충청남도 홍성군의 천태저수지를 대상으로 이루어졌다. 이동저수지는 유효저수량 2천만 톤 이상의 대규모 저수지로, 만수면적 3.05 km2 대비 만수위(43 EL. m)가 낮아 저수량의 증감에 따른 수표면적의 변화가 매우 크게 나타나는 저수지이며, 천태저수지는 유효저수량 약 150만 톤 급, 만수면적 0.36 km2의 저수지이다(Table 1, 농림축산식품 공공데이터 포털; https://data.mafra.go.kr/). 수체 탐지를 위한 연구지역의 공간적 범위는 이동저수지의 경우 37.102°N-37.140°N, 127.180°E-127.221°E, 천태저수지는 36.514°N-36.525°N, 126.740°E-126.754°E으로 설정하여 수체와 비수체의 신호가 위성영상 내 균형적으로 분포하도록 하였다(Ahmad and Kim, 2019). 이동저수지는 산지(44.7%), 농지(19.3%) 및 위성영상 좌측 상단의 초지(9.8%)로 둘러싸여 있으며, 천태저수지의 주변에는 농지(38.9%) 및 산지(36.2%)가 주로 분포하고 있다(Fig. 1).
Table 1.
Target reservoir's specifications
| Reservoir name | Full water level (EL. m) | Lowest water level (EL. m) | Full surface area (100 m2) | Capacity (1,000 m3) |
| Edong (ED) | 43.0 | 31.3 | 30,540 | 20,949 |
| Cheontae (CT) | 52.0 | 45.0 | 3,553 | 1,477 |
2.2 데이터
본 연구에는 CAS500, K3/K3A, S2 총 네 가지의 광학위성과 SAR 탑재 위성인 S1 자료가 사용되었다(Table 2). 수체 및 비수체에서 나타나는 밴드 별 특성을 살펴보기 위해 각 광학위성의 적(red), 녹(green), 청(blue), 근적외(Near Infrared, NIR) 밴드 자료가 사용되었으며, 수체 탐지 정확도 향상을 위해 S1 SAR의 VV편파(VV-polarized) 후방산란계수(backscattering coefficient) 자료가 사용되었다. 2022년 12월 1일, 2023년 1월 30일 이동, 천태 저수지에서 CAS500의 청천 영상이 가용했으며, 이를 기준으로 가능한 가까운 날짜에 확보된 Sentinel-2 및 S1 영상이 활용되었다. K3/3A의 경우 2019년 2월 26일, 2021년 2월 21일 청천 영상을 확보하여 이를 사용하였다. 자료 처리와 결과 비교에 용이하도록, 모든 위성영상은 EPSG:4326 (WGS84) 좌표계로 재투영(reprojection)하였다.
Table 2.
Data used in the study
2.2.1 차세대중형위성 1호(CAS500)
CAS500은 우주개발 중장기 계획(MSIP, 2014)에 따라 인공위성 독자 개발을 목표로 개발된 위성으로, 국토 및 자원관리, 재난재해 대응 및 국가공간정보 활용을 목적으로 2021년 3월 22일 발사되었다. 0.5 m 급 해상도의 흑백 영상과 2.0 m 급의 칼라(R, G, B, NIR) 영상을 제공할 수 있는 전자광학 탑재체(Advanced Earth Imaging Sensor System-Compact, AEISS-C)가 탑재되어 있으며, 약 12 km의 촬영폭을 가지고 있다. 한반도를 촬영한 영상은 전국에 구축된 기준점과 수치표고모형을 활용한 정밀기하/정사보정을 거친 후 국토정보플랫폼(http://map.ngii.go.kr/)을 통해 제공되고 있으며, 2023년 3월 기준 약 1,300장의 남한지역 영상이 구축되어 있다. CAS500 운영 기간, 이동저수지와 천태저수지를 관측한 영상은 각 1장이었으며, 해당 영상의 RGB 영상은 Figs. 1(b) and 1(f)와 같다.
2.2.2 다목적실용위성 3/3A호(Kompsat-3/3A)
K3와 K3A는 국내 위성 개발 기술의 확보와 공공 수요를 위한 위성영상 획득을 목표로 개발된 위성으로, 각각 2012년 5월 18일, 2015년 3월 26일 발사되었다. K3에는 0.7 m 급의 흑백 영상과 2.8 m 급의 칼라 영상을 제공하는 AEISS가 탑재되어 있으며, K3A에는 각 0.55 m, 2.2 m 급의 영상을 제공하고 적외 영역 관측이 가능한 AEISS-A가 탑재되어 있다. 두 위성영상은 모두 한국항공우주연구원의 아리랑 위성영상 공공배포 홈페이지(https://ksatdb.kari.re.kr/)를 통해 제공되고 있다. 2014년~2021년 간 이동저수지 지역의 청천 영상은 K3 10장, K3A 3장이며, 천태저수지의 경우 K3 16장, K3A 7장의 청천 영상이 가용하여, 저수지별 1장씩 영상을 구축하였다(Figs. 1(c) and 1(g)).
2.2.3 Sentinel-2
S2는 ESA에서 운영하는 위성으로, 약 5일의 시간해상도를 가진다. 약 10 m 급 해상도의 가시영역 밴드와 NIR 밴드 데이터를 포함, 총 13개의 분광대역 관측이 가능한 다분광 촬영장비(Multi-Spectral Instrument, MSI)를 탑재하고 있으며(Drusch et al., 2012), 본 연구에서는 2, 3, 4, 8번 밴드에 해당되는 B, G, R, 그리고 NIR 영상을 사용하였다. Google Earth Engine (GEE)에서 제공되고 있는 Level-2A 자료를 활용하였으며, 영상 내 구름이 적은 날짜 중 CAS500의 날짜와 가장 가까운 2022년 11월 23일(이동저수지), 2023년 2월 1일(천태저수지)의 영상이 사용되었다(Figs. 1(d) and 1(h)).
2.2.4 Sentinel-1
S1은 C-band SAR (5.405 GHz) 탑재 위성으로, 지표면에 대한 위상(phase)과 진폭(amplitude) 정보를 수신한다. S1 데이터는 크게 수신 정보에 따라 Single Look Complex (SLC)와 Ground Range Detected (GRD)로 나뉘며, 편파에 따라 총 네 가지(VV-, HH-, VH-, HV-polarization), 획득 방식에 따라 세 가지(Stripmap, SM; Interferometric Wide swath, IW; Extra wide swath, EW)로 나뉜다. 한국에서는 VV, VH 편파 데이터만 제공되며, 본 연구에서는 GEE 플랫폼을 통해 10 m 해상도를 가지는 IW 모드 GRD 데이터, 그 중에서도 수체 탐지에 유리한 것으로 알려진 VV 편파 영상을 사용하였다(Grimaldi et al., 2020; Pierdicca et al., 2013)(Figs. 1(e) and 1(i)). GEE 플랫폼 내 S1 데이터는 열 노이즈 제거(thermal noise removal), 복사보정(radiometric calibration), 지형보정(terrain correction) 전처리 단계를 거친 후 제공되고 있다.
3. 방법론
3.1 비지도학습 기법: K-means clustering
클러스터링(Clustering) 알고리즘은 데이터의 특성에 따라 비슷한 데이터들을 여러 개의 클러스터로 분류해주는 Artificial Intelligence (AI) 기반 비지도 학습 기법이다(Hartigan and Wong, 1979). K-means 클러스터링 기법의 경우 가장 일반적으로 사용되고 있는 클러스터링 알고리즘으로 데이터를 k개의 그룹으로 구분한다. 그룹의 개수인 k는 사용자가 사전에 정의하며, 동일한 그룹에 속한 데이터들은 유사한 속성을 갖고 서로 다른 그룹에 속한 데이터들은 상이한 속성을 갖도록 군집화가 이루어진다. K-means 클러스터링은 k 개의 초기 중심점을 임의로 선택한 후 각 클러스터 내 데이터와 중심점 사이 유클리디언(Euclidean) 거리의 합이 최소가 되는 중심점을 찾는 계산을 반복적으로 수행하여 최적의 군집화를 수행한다(Likas et al., 2003). 클러스터 내 중심점의 재설정은 Eq. (1)을 이용하여 이루어진다.
여기서, μi는 클러스터의 중심, ω는 클러스터에 속한 집합, x는 j번째 클러스터에 속한 값을 의미하며, 클러스터의 중심점의 변경이 없을 때까지 재설정 과정을 반복한다. K-means 클러스터링 기법은 기존의 1차원(히스토그램)에 한정되는 임계값 기반 수체 탐지 기법과 달리 다차원 데이터의 분류가 가능하다는 장점을 가지고 있다. 이에 본 연구에서는 광학영상의 분광특성 기반 NDWI와 SAR 영상의 VV 편파 후방산란계수에 K-means 클러스터링 기법을 적용하여 수체/비수체 이진 분류를 수행하였다.
3.2 검증 도구
본 연구는 저수지별 단일 영상만을 이용하였기 때문에 각 위성자료의 수체 탐지 성능에 대한 정량적 평가만 이루어졌다. 수체 탐지 결과의 오탐지(False Positive, FP) 및 미탐지(False Negative, FN) 정도를 파악하기 위해 혼동 행렬(confusion matrix)이 사용되었으며(Table 3), 정량적 정확도 평가를 위해 네가지 지표(정확도, Accuracy; 정밀도, Precision; 재현율, Recall; Mean Intersection over Union, mIoU)를 계산하였다. 네 지표는 Eqs. (2)~(5)으로 표현되며, 모두 0 부터 1 사이의 값으로 정의된다. 정밀도는 오탐지에 대한 척도, 재현율은 미탐지 정도에 대한 척도로서 해석된다. 평가 및 검증을 위한 참값(수체 라벨)은 CAS500과 K3/K3A 데이터로부터 계산된 NDWI 영상을 디지타이징(digitizing)하여 생산되었다(Feyisa et al., 2014).
4. 연구 결과 및 토의
4.1 광학/SAR 위성 밴드 별 데이터 분포 특성
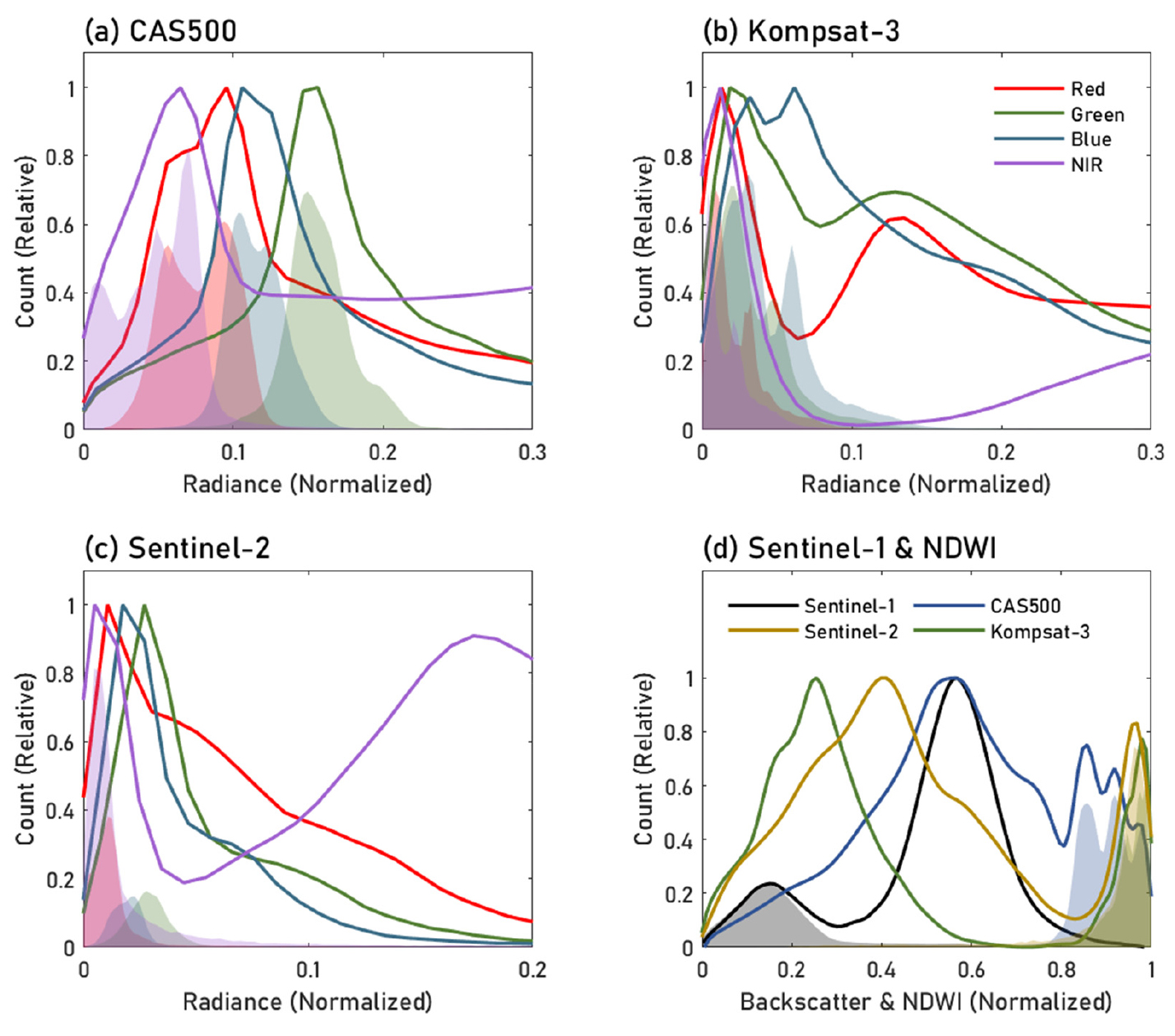
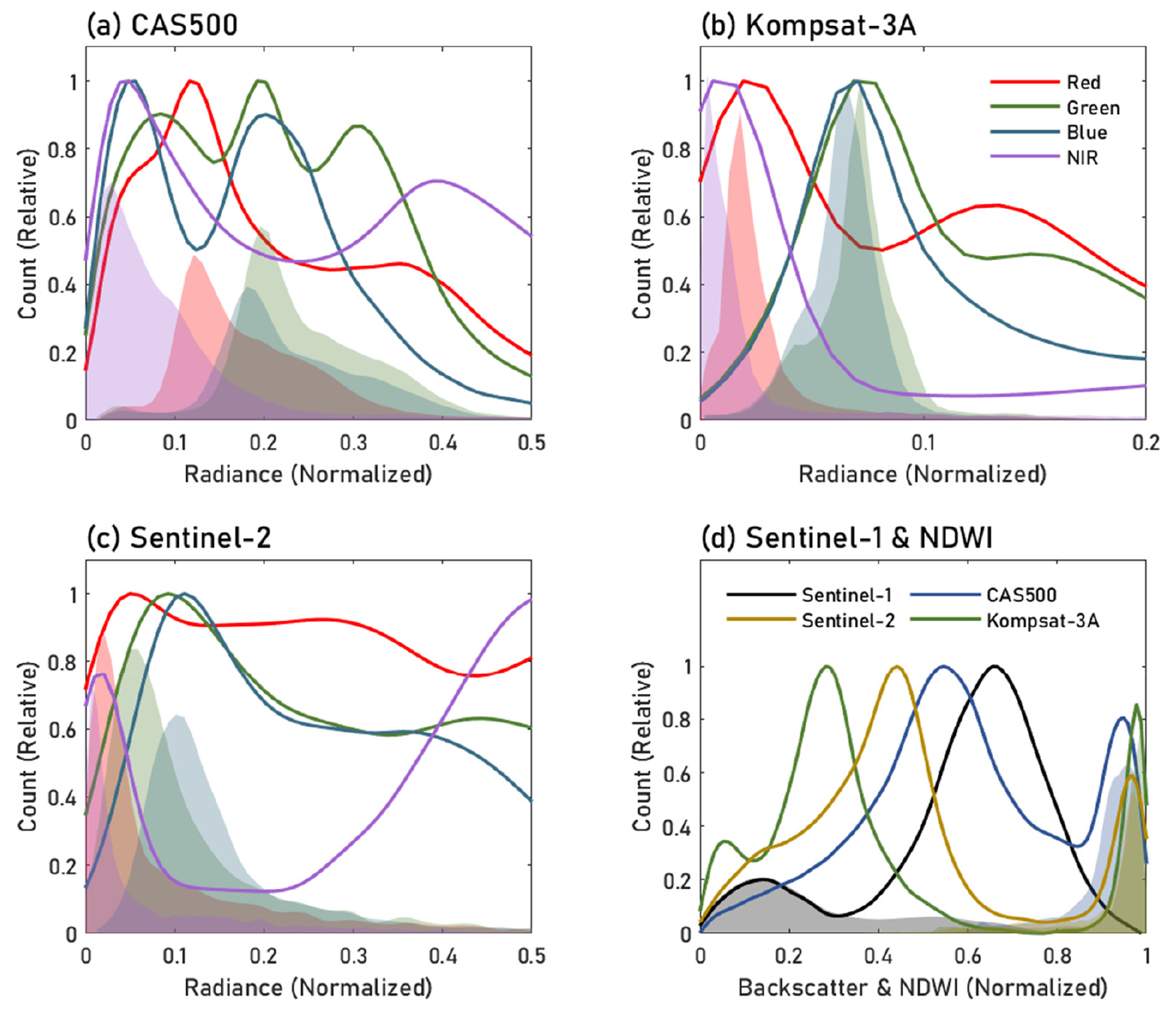
Figs. 2 and 3은 각각 이동저수지, 천태저수지에서 관측된 밴드별 데이터 분포와 NDWI 및 후방산란계수의 분포를 나타낸다. 음영으로 나타낸 분포는 NDWI 영상을 디지타이징 하여 제작한 검증 영상 내 수체에 해당되는 픽셀의 분포를 나타낸다. 모든 영상은 서로 직관적인 비교를 위해 정규화(normalize) 하여 나타내었으며, y축(빈도) 또한 최대값을 기준으로 정규화 하였다. 일반적으로 R, G, B, NIR 밴드 데이터는 단일분포(unimodal distribution) 또는 쌍봉분포(bimodal distribution) 형태를 보이며, 가시, 적외 전 영역에 걸쳐 낮은 반사율을 가지는 수체 특성상, 수체에 해당하는 픽셀들은 주로 낮은 값을 가지는 것을 확인할 수 있다(Zhuge et al., 2017). 대부분의 경우 수체 픽셀은 전체 데이터 분포의 첫 번째 극댓값 이하의 최대값을 가지는 정규분포 또는 감마분포 형태로 나타났으나, 천태저수지에서 CAS500 데이터는 다른 분포 양상을 보였다(Fig. 3(a)). 이는 해당 영상 관측 시간에 1) 저수지의 수표면이 얼어 있었고, 2) 영상 내 그림자가 상당히 분포해 있기 때문이다(Fig. 1(f)). 얼어 있는 수표면은 일반적인 수체보다 높은 가시영역 반사율과 낮은 근적외영역 반사율을 가지며(Warren, 1982), 영상 내 존재하는 그림자에서는 수체와 비교할 수 없을 정도로 낮은 값이 관측될 수 있다(Bangira et al., 2019). CAS500의 관측 시간은 오전 약 11시로, 영상 내 능선의 서쪽에 그림자가 상당히 분포하는 것을 확인할 수 있다. 이에 따라 G, B 밴드 데이터는 다봉분포 형태를 보였고, 수체 픽셀들은 그림자 픽셀보다 높은 값을 가지는 것을 확인하였다. NDWI와 후방산란계수는 수체와 비수체의 특징을 가진 두 분포로 나뉠 수 있는 쌍봉분포 형태로 나타났으며, 수체 픽셀은 높은 NDWI, 낮은 후방산란계수 영역에 분포하였다(Figs. 2(d) and 3(d)). 영상 전체와 수체에 해당하는 데이터 분포의 차이는 앞선 결과(R, G, B, NIR) 대비 매우 작은 것으로 나타났다.
4.2 단일영상 클러스터링 기법의 효율성 검토
단일 영상에 K-means 기법을 적용할 경우 히스토그램 기반 임계값 기법과 동일한 논리로 수체/비수체 구분이 이루어진다. 따라서 임계값이 잘못 설정될 경우 상당한 오탐지 및 미탐지의 위험이 존재한다(Xu, 2006). Fig. 4는 Figs. 2(d) and 3(d)의 1차원 분포에 대해 0 부터 1 사이 임의의 임계값을 적용한 결과와 K-means 기법에 의해 산정된 임계값을 나타내며, Table 4에는 K-means 기법을 적용한 결과를 기재하였다. NDWI의 경우 정확도는 약 0.2에서부터 증가하여 0.6-0.8 사이 임계값 적용 시 1에 가까운 최대값을 갖고 이후 감소하는 것으로 확인되었으며, 정밀도는 증가하는 형태, 재현율은 감소하는 형태를 보였다. 후방산란계수의 경우 값이 작은 영역에 수체가 분포하므로 NDWI와 반대의 양상을 보이는 것을 확인할 수 있다. 전체적인 정확도는 K3/K3A에서 가장 높게 나타났으며, 일정 정확도가 보장되는 임계값 산정 범위 또한 가장 넓다. 반면 CAS500은 약 0.8 내외의 임계값을 적용할 경우 최대 0.96의 정확도를 가질 수 있으나 임계값이 잘못 설정될 경우 정확도가 낮아질 위험이 가장 크다. S1과 S2는 K3/K3A와 CAS500의 중간 정도의 정확도, 정밀도 분포를 보였다.
K-means 기법 적용 결과 이동저수지에서는 Fig. 4에 나타낸 정확도의 최대값 기준 약 72%, 99%, 86%, 97%(CAS500, K3, S2, S1)의 정확도를 갖는 임계값이 산정되었으며, 천태저수지에서는 약 82%, 99%, 100%, 97%의 정확도를 갖는 임계값이 산정되었다(Table 4). 또한, 앞서 언급한 그림자에 의한 영향으로 CAS500에서 가장 낮은 정밀도(약 30%의 높은 오탐지율, Table A1)를 가지는 임계값이 산정되었고, S1, S2에서 가장 낮은 재현율(최대 약 5%의 미탐지율, Table A1)을 가지는 임계값이 산정되었다. 이에 따라 정확도 및 정밀도는 K3/K3A에서 가장 높았으며, CAS500에서 가장 낮은 것으로 나타났다. 세 광학위성 모두 재현율이 정밀도보다 높은 것을 확인할 수 있는데, 이는 NDWI의 특성상 수표면에서는 미탐지가 거의 발생하지 않으며(Kaplan and Avdan, 2017) 비수체에서 나타나는 오탐지에 의한 영향이 지배적임을 의미한다. 한편, S1의 경우 재현율이 비교적 낮은데, 이는 광학위성에 비해 미탐지로 판별된 픽셀이 많다는 것, 결과적으로 저수지의 경계를 정확하게 모의하는 데 한계가 있다는 것을 의미한다. 픽셀 단위 혼동 행렬 요소의 개수를 나타낸 Table A1에서 또한 이러한 현상을 정량적으로 파악할 수 있다. 이는 주로 수체-비수체 경계 픽셀들이 수체 중앙 픽셀 대비 높은 값을 가지기 때문이며, S1 SAR의 이러한 특성은 타 저수지를 대상으로 한 연구에서도 언급된 바 있다(Lee et al., 2022).
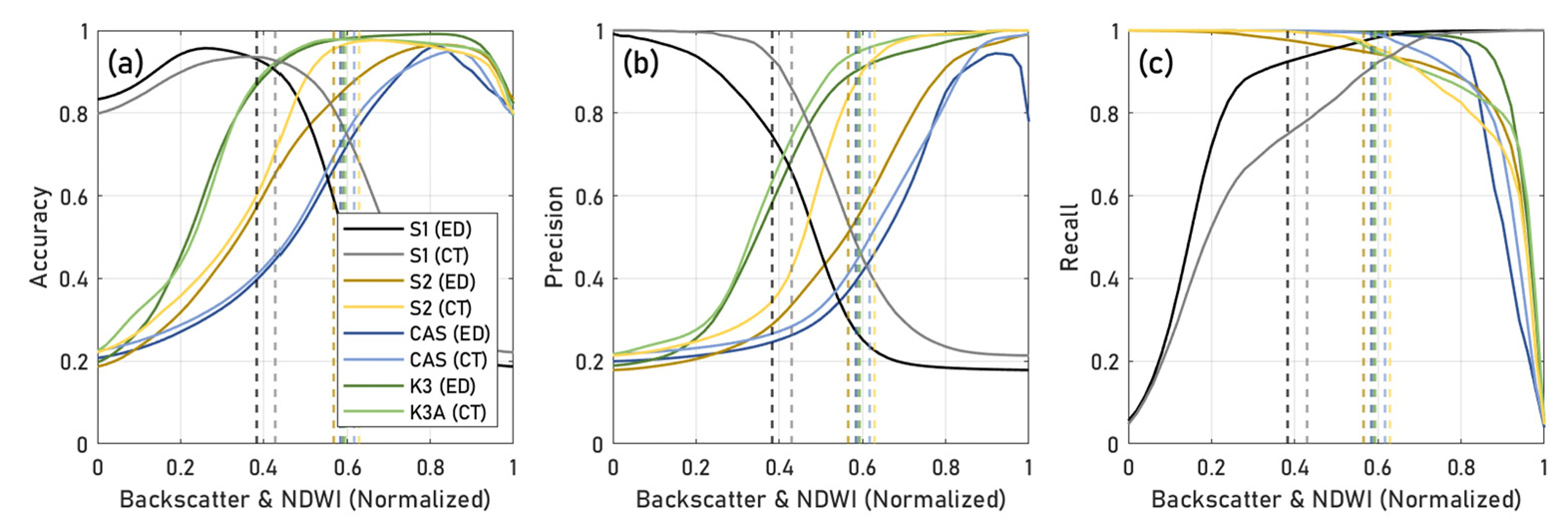
Table 4.
Threshold and performance metrics of detection results using K-means clustering
4.3 영상 융합을 통한 정확도 향상 정도 평가
앞선 4.2절에서는 광학영상과 SAR 영상이 서로 상반되는 한계점을 나타내는 것을 확인하였다. 따라서 본 절에서는 NDWI와 후방산란계수 영상을 함께 사용하여 동일한 방법론(K-means 클러스터링)을 적용하였을 때 단일 영상을 사용한 경우보다 정확도의 향상이 있는지 살펴보고자 하였다. Fig. 5는 천태저수지에서의 NDWI와 후방산란계수 데이터로 이루어진 2-D grid space heat scatter와 K-means 기법을 적용한 결과를 나타낸다. 세 조합 모두 수체(높은 NDWI, 낮은 후방산란계수)와 비수체(낮은 NDWI, 높은 후방산란계수)에 의한 두 가지 분포가 뚜렷하게 나타났다. 시각적으로, 수체와 비수체로부터 수신한 신호의 구분 능력은 K3A와 S2가 매우 우수하며, S1의 경우도 준수한 능력을 가지고 있음을 확인할 수 있다. 2-D K-means 기법을 적용한 결과는 단일 임계값이 아닌 2-D grid space 상의 직선(임계선)으로 나타난다. 여기서, 직선의 기울기가 각 데이터의 수체/비수체 구분 능력을 반영한다고 가정한다면, K3A와 Sentinel-2의 구분 능력은 S1보다 우수(Figs. 5(b) and (c), slope=1.54, 1.24)하고, CAS500의 구분 능력은 상대적으로 낮다는 것(Fig. 5(a), slope=0.94)을 알 수 있다. 임계선에 따라 이진분류를 할 경우 단일 영상만을 사용한 결과에 나타난 오탐지(Fig. 5(a)의 붉은 영역 1, 2, 3 내 존재)와 미탐지(Fig. 5(a)의 푸른 영역 4, 5 내 존재)가 상당히 개선될 것을 예상할 수 있다.
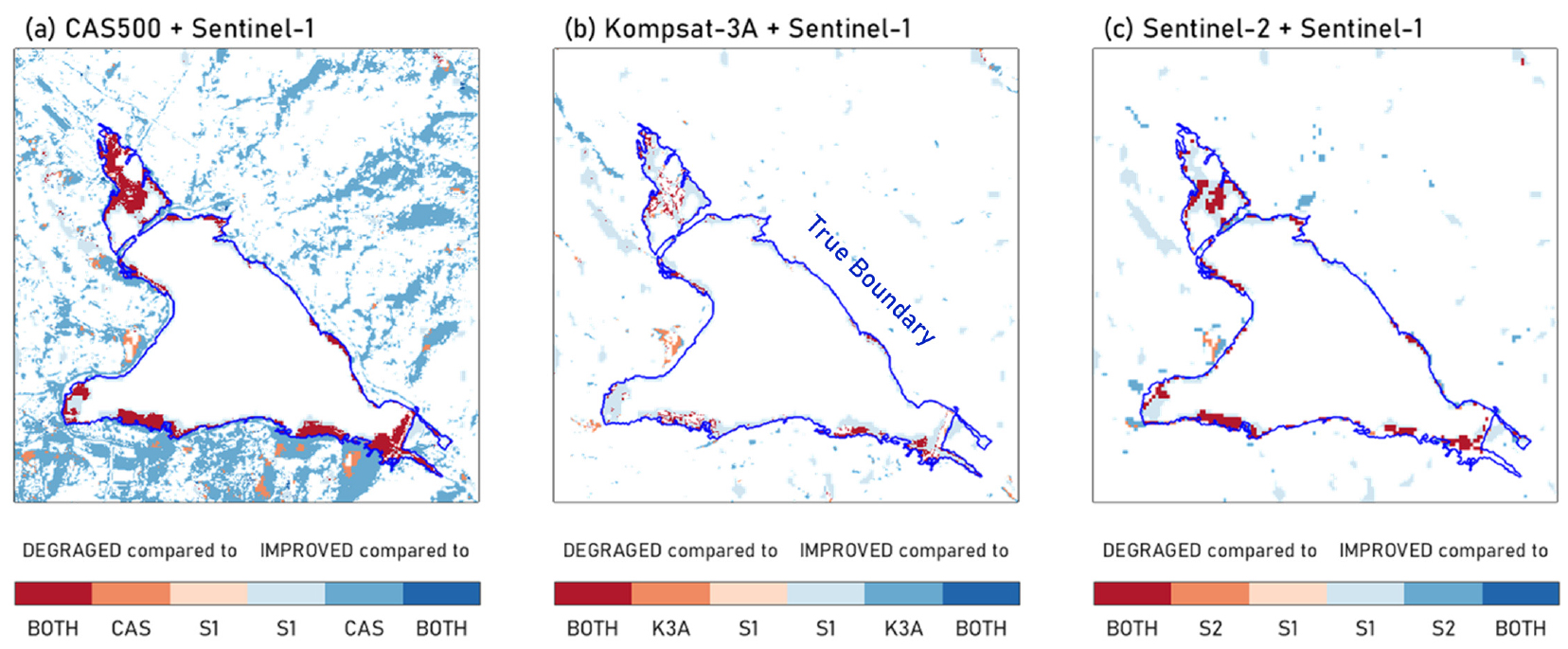
Table 5는 임계선을 적용한 이진분류 결과 지표와 향상 정도를 나타내며, Fig. 6은 단일 영상을 사용한 결과와 비교하였을 때 픽셀단위 이진분류 정확도의 향상 또는 감소 정도를 나타낸다. CAS500의 경우 S1과 융합한 결과 비수체에서 발생한 오탐지가 크게 감소하였으며(20% 감소, Table A2), 주로 그림자 또는 농경지 픽셀에서 발생하였다(Fig. 6(a)). 이는 Fig. 5(a)의 영역 1에 비수체 픽셀이 많이 분포해 있음을 의미하며, 영역 2에 존재하는 S1의 오탐지 픽셀 또한 상당수 보정되었다. 한편, 수체 영역 내부에는 단일 영상을 사용하였을 때는 CAS500과 S1 모두 수체로 판단하였으나 융합 이후 비수체로 분류한 픽셀이 일부 확인되었는데, 이는 영역 3 내 존재하는 수체 픽셀에 해당된다. 결과적으로, CAS500 수체 탐지 결과의 정확도는 정밀도의 매우 큰 향상(85%), 재현율의 일부 감소(-14%)와 함께 약 22% 향상되었으며, mIOU 또한 약 43% 향상되었다(Table 5). K3A와 S1의 융합은 주로 S1의 정확도가 향상되는 결과를 보였으며(Fig. 6(b)), 이는 Fig. 5(b)의 영역 1보다 영역 2에 비수체 픽셀이 더 많이 분포해 있음을 의미한다. 영역 4 내부 수체 픽셀이 보정되어 S1을 단독으로 사용한 경우보다 저수지의 경계를 정확하게 모의하는 결과 또한 확인할 수 있다. 결과적으로, K3A는 단독으로 사용한 경우보다 오탐지(미탐지) 약 1%의 작은 감소(증가)와 함께 정밀도(재현율) 약 3% (-4%)의 작은 향상(감소)이 있었고, 전체적인 정확도의 변화는 없었으며, mIOU는 약 1% 감소하였다(Table 5, Table A2). S2의 경우 또한 유사한 결과가 나타나는 것을 확인할 수 있다(Fig. 6(c)).
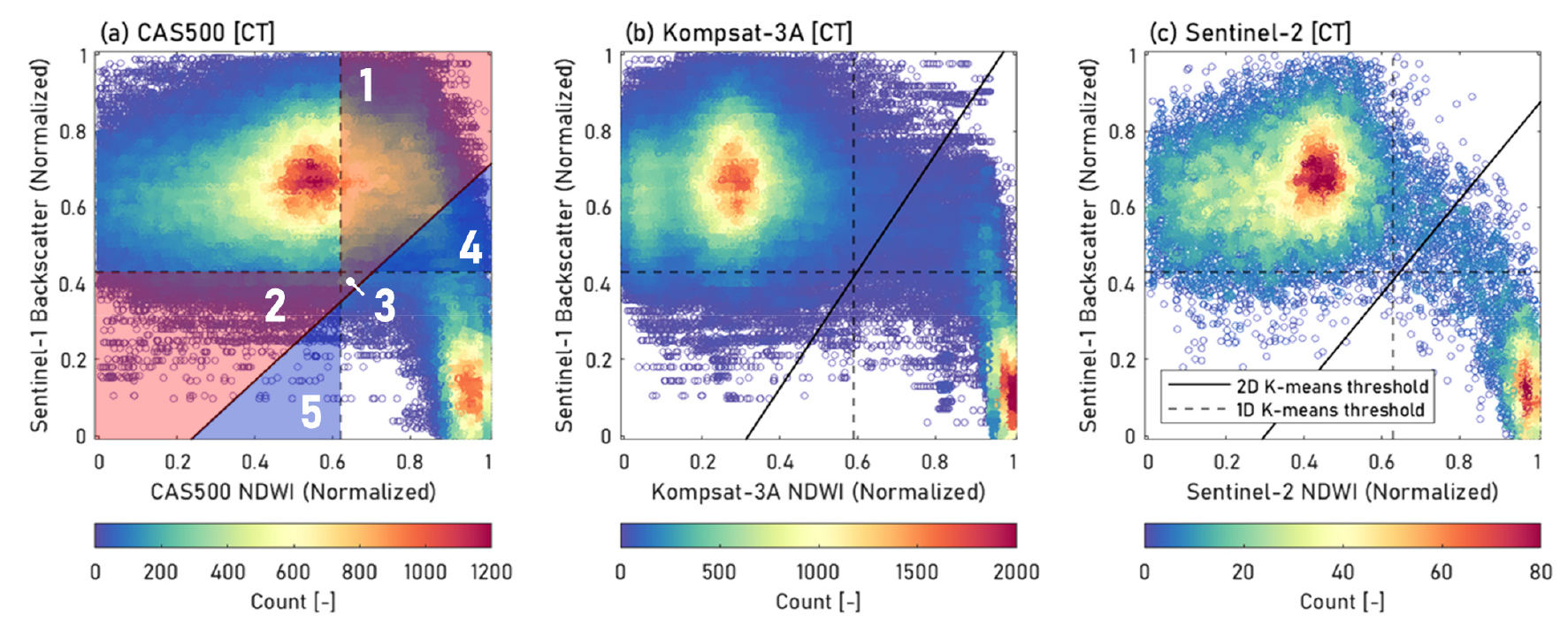
Fig. 5.
Heat scatters between (a) CAS500, (b) K3A, (c) Sentinel-2 derived NDWI and backscatter, and thresholds using 1-dimensional and 2-dimensional K-means clustering at Cheontae reservoir. Dashed lines represent 1-dimensional threshold from Fig. 4, and the bold line represents 2-dimensional threshold
Table 5.
Performance metrics of detection results using 2-dimensional K-means clustering (sources combined with Sentinel-1 backscatter data) at Cheontae reservoir (numbers in brackets indicate improvements or degradations compared to the results using single source)
5. 결론 및 요약
본 연구에서는 국내위성인 차세대중형위성 1호(CAS500), 다목적실용위성 3호 및 3A호(Kompsat-3/3A)와 유럽의 S2 광학위성, S1 SAR 위성자료가 수체 및 비수체 지역에서 가지고 있는 특성을 살펴보고 이를 바탕으로 수체를 정확하게 탐지하고자 하였다. 산지와 농지를 포함, 이동저수지와 천태저수지 지역에 대한 밴드별 신호와 NDWI, 후방산란계수의 분포를 파악하였고, 단일 영상 및 다중 영상에 K-means 클러스터링 기법을 적용하여 수체 탐지 성능을 정량적으로 평가하였다. 짧은 운용 기간으로 인해 국내 수자원 모니터링을 위한 활용성이 충분히 연구되지 않은 CAS500의 수체 탐지 성능을 평가하고 SAR 위성과의 융합을 통해 활용 가능한 수준의 정확도를 확보하였다는 점에 본 연구의 의의가 있으며, 그 결과는 다음과 같이 요약할 수 있다.
1) CAS500, K3/K3A, S2 기반 NDWI와 S1 SAR 후방산란계수의 분포는 전반적으로 수체와 비수체를 뚜렷하게 구분하는 쌍봉분포 형태로 나타났으나 CAS500의 경우 관측 시간(2023년 1월 30일, 오전 약 11시)에 의한 영향(수표면 동결, 그림자)을 확인할 수 있었다.
2) 단일 영상(NDWI, 후방산란계수)에 K-means 기법을 적용한 결과, 각 영상에서 나타날 수 있는 최대 정확도보다 낮은 정확도를 갖는 임계값이 산출되었으며, 그 수준은 CAS500에서 가장 낮고(이동저수지: 72%, 천태저수지: 82%), K3/K3A에서 가장 높았다(두 저수지 모두 99%).
3) 광학위성의 수체 탐지 성능은 비수체 지역에서 나타나는 오탐지에 의한 영향이 지배적이었으며(상대적으로 낮은 정밀도), SAR의 경우 미탐지에 의한 영향이 상대적으로 큰 것으로 나타났다(낮은 재현율).
4) 2-D K-means 기법 적용을 통한 임계선 산출 결과, 위성별 수체/비수체 구분 능력은 K3A가 가장 높고, 이후 S2, S1, CAS500 순서대로 감소하였다.
5) 단일 영상만을 사용한 결과와 비교시, NDWI 영상에서 발생한 오탐지가 대부분 개선되어(특히 CAS500의 경우 정밀도 약 85% 향상) 모든 결과의 정확도가 0.95 이상으로 나타났으나, 저수지 경계 픽셀에서 미탐지가 증가하기도 하였다.
최근 CAS500을 포함한 고해상도 신규 위성들이 증가하여 이를 활용한 연구의 중요성이 강조되고 있다. 특히, 수자원 분야에서는 가용한 밴드의 수가 많은 광학위성 데이터와 딥러닝 기법을 활용하여 수체를 정밀하게 구분하는 연구가 다수 이루어지고 있다(Abid et al., 2021; Duan and Hu, 2019; Li et al., 2022). 그러나, 광학위성은 기상 조건(구름, 강수 등)에 크게 영향을 받아 장기간 수자원을 연속적으로 모니터링하는 데 어려움이 있다. 한편, SAR 위성은 전천후 관측이 가능하여 연속적 관측이 가능하지만 수체 내/외부적으로 오탐지 및 미탐지가 비교적 발생하기 쉽다는 한계점이 존재한다(Pappas et al., 2018). 본 연구에서는 두 종류의 위성을 함께 사용할 경우 상호보완적으로 작용하여 비교적 간단한 기법을 적용했음에도 수체 탐지 정확도가 크게 향상될 수 있는 것을 확인하였다. 그러나, 동일한 저수지를 동일한 날짜에 관측한 광학 영상과 레이더 영상을 동시에 확보하는 것은 아직까지 다소 제한적이다. 추후 차세대중형위성 2호, 초소형 위성 등 고해상도 광학 위성의 추가적인 개발, 차세대중형위성 5호인 수자원위성 등 국내 고해상도 SAR 위성의 개발과 함께 영상 융합기술, 딥러닝 기반 고도화된 수체 탐지 모델이 개발된다면, 국내 수자원에 대한 매우 정확한 모니터링이 가능할 것으로 기대된다.
