

1. 서 론
2. 레이더 자료 전처리 및 연구방법
2.1 레이더 자료의 전처리
2.2 대상유역 및 입력자료
2.3 U-Net++기반의 강우 예측 모형 설계
2.4 하이퍼파라미터 및 활용된 시스템 환경 정보
3. 연구 결과
3.1 학습된 딥러닝 모델을 통한 강우예측 및 성능 평가
3.2 누적 유역면적 강수량의 비교
4. 결 론
1. 서 론
최근 이상기후로 인해 강우의 빈도와 강도가 증가하면서, 전국적으로 호우 피해가 증가하고 있다(Kim et al., 2016). 특히 2022년 8월 8~9일 서울특별시 한강 이남(강남, 동작 등)에서는 짧은 지속기간 동안 많은 양의 비가 내려 큰 피해가 발생하였다. 예상치 못한 정체전선의 발달로 강우가 짧은시간에 집중되면서 피해가 더욱 커졌고, 많은 인명피해가 발생하였다. 이러한 수재해, 특히 도시홍수와 같은 강한 강우강도에 선제적으로 대응하기 위해서는 단기 강우 예측이 중요하다. 강우 예측 방법으로는 수치 예보 모델, 통계적 방법, 그리고 레이더 기반 방법 등 다양한 방법론이 활용되고 있다. 그중에서도 레이더 강우 자료를 활용한 시공간적 강우 예측 기법은 2시간 선행시간 내에서 높은 정확도를 나타내며, 돌발 홍수와 도시 홍수의 조기 경보에 유용하게 사용되고 있다(Sun et al., 2014).
이러한 레이더 자료를 현업에서 사용하는 이유는 지상 관측소에 비해 높은 시, 공간적 해상도를 제공하기 때문이다. 지상관측소의 경우 관측 지점이 한정되어 있어 강수 현상을 전체적으로 파악하기 어려운 반면, 레이더는 지상관측소가 없는 미계측 유역에 대해서도 넓은 범위를 실시간으로 파악할 수 있기 때문에 레이더 자료를 실황예보에서 활용하고 있다(Collier, 2007). 레이더 자료를 기반으로 한 강우예측의 방법은 대표적으로 외삽 방법과 많은 양의 데이터로부터 강우패턴을 학습하는 딥러닝의 방법으로 나뉜다.
외삽 기반 강우 예측 방법은 예측 시간 동안 강우 강도가 변하지 않고 레이더 에코가 일정한 속도로 이동한다는 가정을 바탕으로 하며, 이를 통해 강수의 발달을 예측할 수 있으며, 이 방법은 Lagrangian 지속성(Lagrangian persistence)으로 알려져 있다(Laroche and Zawadzki, 1994). MAPLE (McGill Algorithm for Precipitation Nowcasting by Lagrangian) 모델은 캐나다 McGill 대학의 Bellon and Austin (1978)이 개발한 강수량 예측 기법으로, Lagrangian 연속 이류 기법을 이용하여 강우 패턴을 단기적으로 예측한다. 이 모델의 핵심 알고리즘은 레이더 합성 영상을 분석하여 강우 패턴의 이동 벡터장을 계산하는 것이다. 국내에서도 외삽을 기반으로 한 강우 예측에 대한 연구가 진행되고 있다. Kim et al. (2015)은 TREC 방법을 사용하여 산정된 강우 이동 벡터장을 이용해 예측 시간 동안 강우의 선형적인 이동을 예측하였다. Kim et al. (2015)은 레이더 자료를 활용해 이류 패턴을 고려한 강우장의 이동 및 변화를 추적하는 기법을 개발하였다.
최근 많은 양의 레이더 데이터를 활용하여 딥러닝 기법을 적용한 다양한 모델 구조를 통해 강우 예측에 대한 연구가 활발히 진행되고 있다. 대표적으로 Convolutional LSTM (Shi et al., 2015), U-Net (Ayzel et al., 2020), GAN (Ravuri et al., 2021) 등의 모델 구조가 주로 사용된다. Shi et al. (2015)은 Convolutional LSTM (ConvLSTM)을 활용하여 시계열 분석 능력과 컨볼루션 신경망의 공간적 특징 추출 능력을 결합함으로써, 레이더 자료의 시공간적 패턴을 효과적으로 학습하여 단기 강수 예측 성능을 크게 향상시켰다. Ayzel et al. (2020)은 U-Net 및 SegNet 구조를 활용하여 시공간적 해상도가 900 km×900 km인 레이더 합성장 강우 예측 모델인 RainNet을 제시하였다. 이 모델은 강우 유무에 대한 예측 성능이 뛰어난 것으로 나타났으나, 선행시간(Lead time)이 길어짐에 따라 인접한 지역들의 강우 패턴을 유사하게 만드는 공간 평활화 경향이 뚜렷해지면서 예측 정확도가 저하되는 문제가 있었다. Ravuri et al. (2021)은 영국의 기상 레이더 자료에 DGMR (Deep Generative Models)을 적용하여 다른 방법과 비교하였다. DGMR 모델 학습을 위해 Conditional GAN (CGAN) 알고리즘을 적용하였고, 이 모델은 단기간에 정확성과 유용성 측면에서 우수한 성능을 보였다. 국내의 경우, Han et al. (2023)은 인코더(encoder)-디코더(decoder) 구조와 다양한 커널 크기의 CNN을 조합한 인셉션(inception) 모듈로 구성된 SimVIP (Simpler yet Better Video Prediction) 모델을 개발하였다. Yoon et al. (2020)은 U-Net과 SegNet에 기반한 CNN 네트워크 구조인 RainNet을 활용하여 강우 예측을 진행했으며, 이 모델은 10분 간격으로 임계 강우 강도에 따른 60분까지의 강우 예측 자료를 생산했고, 기존의 이류 모델보다 전반적으로 더 나은 성능을 보였다. Yoon et al. (2023)은 영국 기상 레이더 자료를 기반으로 한 강우 예측 모델인 DGMR (Deep Generative Model of Rain)에 환경부 강우 레이더 자료를 적용하여 딥러닝 모델의 활용성을 검토하였다.
특히 U-Net과 SegNet에 기반한 CNN 네트워크 구조를 활용하여 강우를 예측할 수 있는 모델을 국내·외에서 개발되어 향상된 예측정확도를 제시하고 있다. 이는 레이더 기반 강우예측에서 심층 학습 기술이 외삽 기술의 한계를 극복할 수 있음을 확인하였다(Ayzel et al., 2020; Yoon et al., 2023). 최근 국외뿐만 아니라 국내에서도 외국에서 구축된 레이더 영상자료를 바탕으로 심층학습을 수행한 사례들이 있다. Tan et al. (2024)은 최근 레이더 자료를 바탕으로 U-Net을 활용하여 강수예측을 진행했다. 나아가 최근에는 세그멘테이션 분야에서는 기존 U-Net 보다 개선된 모형인 U-Net++모형을 활용하고 있다.
본 연구에서는 개선된 U-Net++ 모형을 활용하여 강우레이더 데이터를 활용한 단기 레이더 강우장 예측 모형을 개발하였다는 점에서 기존의 연구와 차이가 있다. 연구수행의 순서는 먼저, 입력되는 레이더 데이터의 구축 및 전처리를 진행하였다. 데이터의 전처리는 시·공간의 해상도를 조정하고, 격자 사이즈에 맞게 보간법을 활용하여 변환하는 과정을 진행하였다. 이후 U-Net++, U-Net 모형을 활용한 딥러닝 기반의 강우예측 모형을 구축하고, 정성적, 정량적인 지표에 대하여 성능평가를 진행한 후 지상에서 관측한 강우 데이터와 레이더로 관측한 강우, 딥러닝 기반의 예측 강우레이더 데이터를 소양강 유역에 대해 비교를 진행하였다.
2. 레이더 자료 전처리 및 연구방법
2.1 레이더 자료의 전처리
해당 장에서는 강우예측 모형의 입력자료로 활용하는 강우레이더 데이터를 중심으로 서술하였다. 먼저 레이더 자료의 설명 및 수집되는 데이터셋의 영역, 자료 수집의 방법 그리고 수집된 자료의 기간에 대해 서술했고, 해당 데이터를 딥러닝에 사용하기 위해 전처리의 과정을 실시했고, 학습을 진행하기 데이터셋의 구분을 진행했다.
2.1.1 데이터셋 정보
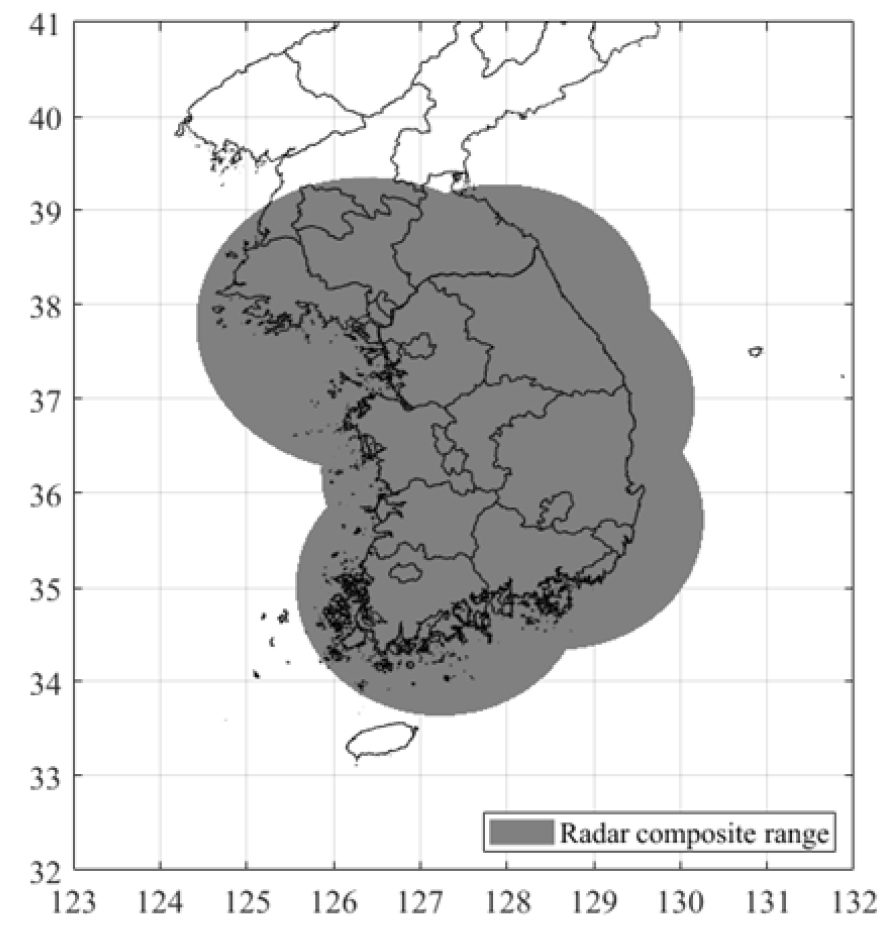
레이더(Radio Detection And Ranging, RADAR)는 전파를 사용하여 목표물의 거리, 방향, 각도, 및 속도를 측정하는 감지 시스템으로 최근에는 기상 예측과 수재해 예방에 활용된다. 기상레이더와 강우레이더는 각각 넓은 범위와 높은 공간해상도의 관측 특성을 가지며, 강우레이더는 특히 예측 강우 생성에 활용되는 격자 데이터를 제공함으로써 국지적 수재해 예방에 기여한다. 현재 환경부에서는 S밴드 이중편파 레이더(dual polarization radar) 7기 및 소형레이더 2기를 운용하고 있다(Fig. 1). 본 연구에서는 환경부 강우레이더 합성장 자료를 활용하여, 강우예측 모형의 학습 및 개발을 진행하였다.
본 연구에서는 의 강수 산정 알고리즘으로 추정된 레이더 강수량을 산정했다. 데이터를 제공받은 환경부는 3가지 강수 산정 알고리즘( , , )으로 레이더강수를 산정하고 있으며, 1분의 시간해상도와 250 m의 공간해상도를 가지고 있다.
딥러닝 강우예측 모형을 개발하기 위해서는 많은 양의 데이터가 요구된다. 특히 우리나라의 경우 주로 여름철에 강수량이 집중되어 있기 때문에 자료의 시간적 범위는 홍수기로 지정했으며, 2016년~2021년의 10분 간격의 강우레이더 자료를 데이터로 사용했다. Table 1은 본 연구에서 사용된 강우레이더 합성장 자료를 정리했다.
Table 1.
Detailed radar composite data used in the study
2.1.2 데이터셋 전처리
딥러닝 기반의 연구를 진행하기 위해서는 딥러닝에 활용될 데이터의 전처리가 필수적이다. 이러한 전처리 과정은 예측하고자 하는 새로운 데이터에도 동일하게 적용되며, 적절한 알고리즘에 맞는 전처리 과정을 거칠수록 학습 성능을 높일 수 있다. 딥러닝은 다양한 데이터를 통해 스스로 특성을 파악하는 능력을 갖추고 있지만, 그 전에 전처리 과정이 제대로 이루어져야만 올바른 학습이 가능하다(Jeon et al., 2012).
본 연구에서는 환경부의 레이더 강수량 자료를 사용하였으며, 특정 값 이상의 강우량이 존재하는 자료에 대해서만 강수량 데이터를 구축하였다. 이 자료는 250 m의 공간해상도와 2.5분 간격의 시간 해상도를 갖추고 있으며, 2500×2100 격자 크기의 NetCDF 또는 Binary 파일 형태로 제공된다. 이러한 데이터를 1km의 공간해상도와 10분의 시간 해상도로 변환하기 위해 3차 회선 보간법(cubic convolution interpolation)을 적용하였다. 3차 회선보간법은 각 픽셀의 가중치 함수를 적용하여 각 픽셀값에 가중치를 곱한 후, 행과 열에 대한 보간을 수행하는 방법이다(Keys, 1981).
모형 훈련을 위해서는 입력데이터가 유효한 값을 가져야 한다. 레이더 관측 범위 내에서 시간당 0.01 mm를 초과하는 격자의 수가 전체 격자의 1% 이상인 강우 사상(event)만을 선택하였고, 그렇지 않은 경우는 제외하였다. 이후 입력데이터의 범위를 0과 1 사이로 조정하는 정규화 과정을 수행하였다. 데이터의 크기가 크면 딥러닝 수행 시 모형의 수렴 속도와 학습 속도가 느려지기 때문에 정규화가 필요하다. 본 연구에서 사용된 데이터의 강우량 편차는 크지 않지만, 홍수와 같은 일부 극단적인 값이 존재할 수 있어 편차가 발생할 수 있다. 이를 방지하기 위해 최소-최대 변환(min-max scaling)을 사용하여 정규화를 수행하였다. 아래 Eq. (1)은 최소-최대 변환식을 나타낸다.
2.1.3 데이터셋 분리
딥러닝 모델 훈련을 위해 전체 데이터셋을 훈련셋(training set), 검증셋(validation set), 그리고 시험셋(test set)으로 나누었다. 훈련셋은 모델 학습에 사용되는 데이터이며, 검증셋은 학습된 모델의 성능을 평가하고 하이퍼파라미터(hyper-parameter) 튜닝에 사용된다. 마지막으로 시험셋은 최종 모델 평가를 위한 데이터이다. 본 연구에서 사용된 데이터는 총 28,892개로, 훈련셋을 70%, 검증셋과 시험셋을 각각 15%로 나누었다. 이렇게 분류된 데이터셋으로 딥러닝 모델을 훈련시키고 평가를 진행하였다. 검증셋은 모델의 성능을 지속적으로 평가하여 최적의 하이퍼파라미터를 찾는 데 사용되었으며, 시험셋은 훈련 과정에 포함되지 않아 모델의 객관적인 평가에 중요한 역할을 한다. Table 2는 데이터셋의 분류를 나타낸다.
Table 2.
Dataset details for model construction
2.2 대상유역 및 입력자료
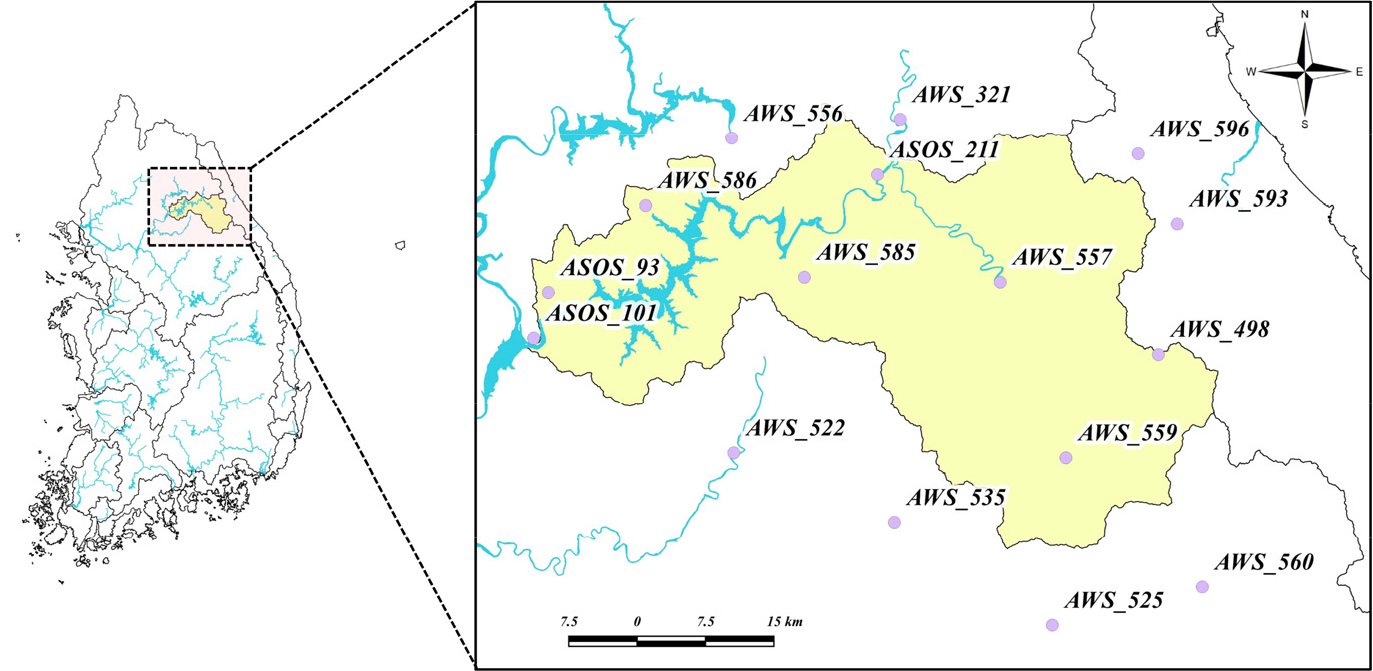
레이더 예측자료는 앞서 말한 것과 같이 환경부 강우레이더 합성장 자료를 바탕으로 한반도 전역에 대한 선행시간별 레이더 자료가 출력된다. 지상 강수량과 레이더 자료 그리고 U-NET/U-NET++모델을 활용한 예측 레이더 자료의 비교를 위해 본 연구에서는 소양강 유역을 비교 대상으로 선정하였다. 각 자료들의 선행시간별 60분까지의 유역면적에 해당하는 누적강수량을 계산했다. 지상강우의 값을 계산하기위해 소양강 유역 근처에 위치한 3개의 종관기상관측소(Automatic Synoptic Observing System, ASOS)와 13개의 방재기상관측소(Automatic Weather System, AWS)를 대상으로 티센 폴리곤(Thiessen polygon) 방법을 사용하여 지상 강우량을 산정하였다. Table 3은 각 관측소별 이름과 지점번호, 위·경도 자료를 나타낸 표이다.
지상강우(ASOS, AWS)의 경우 기상청 기상자료개방포털 사이트를 통해 수집하였고, 강우레이더 합성장 자료의 강우량은 한강 홍수통제소에서 제공받은 자료를 바탕으로 산정했다. U-Net++구조를 활용한 자료의 경우 4개의 입력데이터((30분전)~(현재))까지의 자료로 10분후의 자료()를 예측하고, 이후 예측자료를 다시 입력자료로 활용하여 선행시간 180분()까지의 예측 강우레이더 자료를 생산하는 방식으로 선행시간별 강수량을 산정했다.
Table 3.
A summary of geographical characteristics of 16 weather stations operated by KMA
2.3 U-Net++기반의 강우 예측 모형 설계
이 장에서는 강우 예측 모형을 설계하기 위해 사용된 딥러닝 모델 구조에 대해 설명하였다. 특히 기존에 많이 사용되는 U-Net 모델과의 차이점 및 U-Net++의 특징에 대해 다루었다. 또한 U-Net++ 모델의 구성층 정보와 하이퍼파라미터 설정값에 대해서도 정리하였다.
본 연구에서는 CNN (convolutional neural network, 합성곱 신경망) 구조를 기반으로 한 U-Net++를 활용하여 단기 강우 예측 모형을 설계하였다. CNN은 영상이나 이미지의 패턴을 찾기에 적합한 알고리즘으로, 이미지를 직접 학습하고 패턴을 사용하여 그 이미지를 분류하는 신경망이다. Fig. 2는 본 연구에서 사용된 CNN 구조를 대략적으로 나타낸 것이다. 본 연구에서 사용된 CNN 구조는 합성곱 계층(convolutional layer), 모델의 비선형성을 부여하여 복잡한 패턴을 학습할 수 있게 하는 활성화 함수(activation function)로 대표적으로 ReLU (Rectified Linear Unit)를 사용하였으며, 풀링 계층(Pooling layer)을 반복적으로 배치하여 깊은 층의 네트워크를 구성하고, 이를 통해 예측 결과를 생성한다.
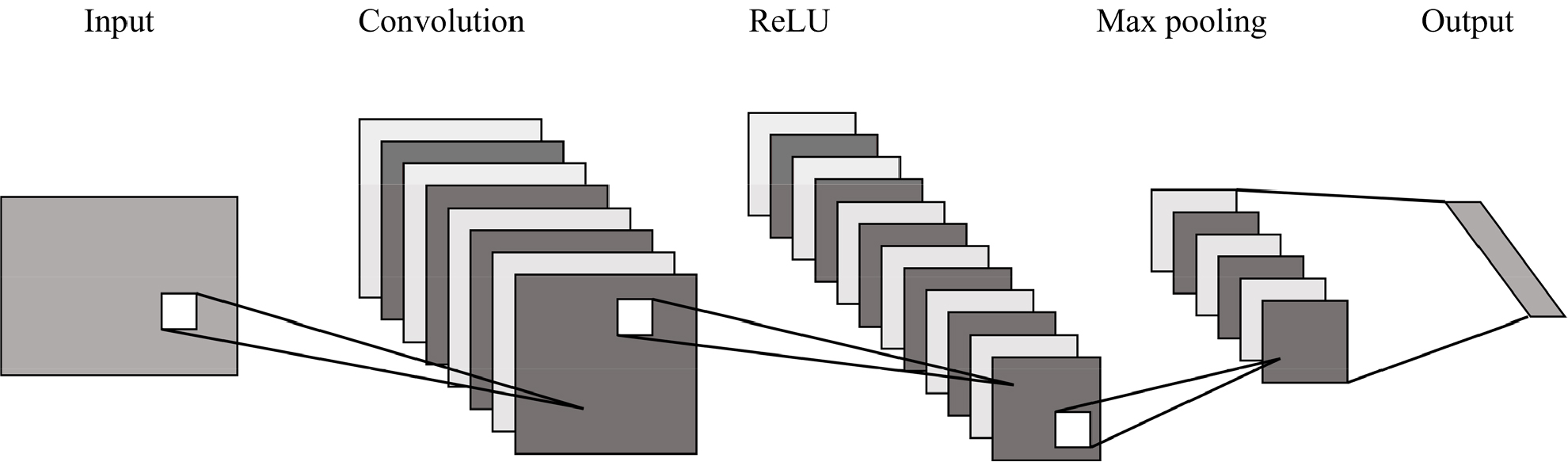
Krizhevsky et al. (2012)에 따르면, 합성곱 계층은 입력 데이터에서 특징을 추출하는 역할을 하며, 여러 개의 필터를 적용하여 다양한 특징 맵(feature map)을 생성한다. ReLU 층은 모델에 비선형성을 부여하여 복잡한 패턴을 학습할 수 있도록 하며, 풀링 계층은 Max Pooling과 Average Pooling으로 나뉜다. 본 연구에서는 Max Pooling 방법을 사용하였다.
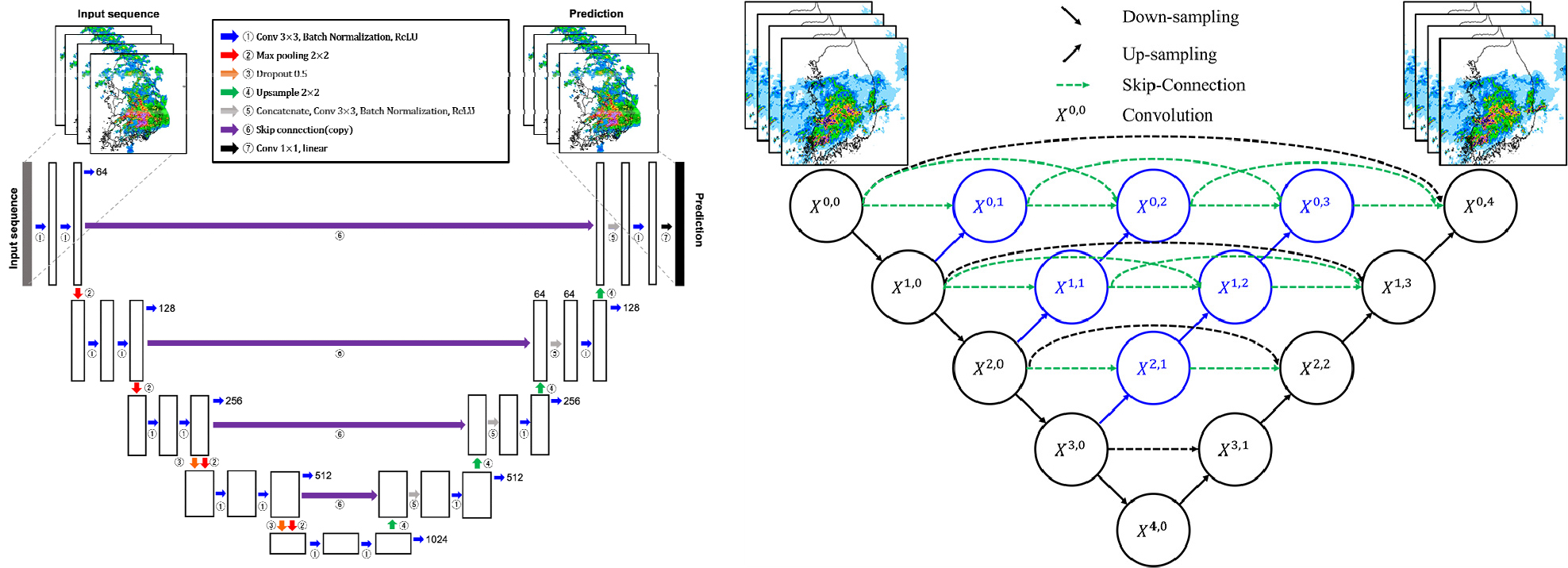
본 연구에서는 CNN 구조로 구성된 U-Net++ 모델을 활용하여 레이더 강우 예측 모형을 구축하였다. U-Net++ 구조는 기존의 U-Net 구조와 유사하게 인코더와 디코더의 구조를 가진다. 인코더는 입력 이미지의 특징을 추출하고, 디코더는 이 특징을 이용해 예측을 수행한다. 또한, 인코더에서 추출된 특징을 디코더에 직접 연결하는 스킵 연결(skip connection)의 특징을 가지며, 인코더는 연산을 통해 특징을 추출하고, 디코더에서는 업샘플링(upsampling)을 통해 공간해상도를 복원하는 특징이 있다(Ronneberger et al., 2015). 그러나 개선된 U-Net++ 구조는 기존의 스킵 연결이 더 복잡한 밀집 스킵 경로(dense skip pathways)로 연결되며, 중간 블록을 사용하여 더 많은 정보를 활용해 성능을 향상시킨다. 이러한 차이를 통해 다양한 해상도의 특징을 결합하여 더 많은 하이퍼파라미터를 계산함으로써 모형의 성능 향상에 기여할 수 있다(Zhou et al., 2018). Fig. 3의 좌측은 U-Net구조, 우측은 U-Net++ 구조를 나타낸다.
2.4 하이퍼파라미터 및 활용된 시스템 환경 정보
본 연구에서는 손실함수로 평균절대오차를 사용하고, 최적화 알고리즘으로 Adam을 적용하고 학습율은 0.0001로 설정하였다. 입력 데이터의 크기가 큰 관계로 시스템 환경에 맞춰 최대 배치 크리글 8로 조정하였고, 학습 에포크는 40으로 진행하였다. 이때 학습의 과적합을 방지하기 위해 조기종료기법을 활용하였으며 검증 데이터셋에서 손실함수값이 최소일 때 학습을 중단하도록 설정하였다. 모델 학습시간은 총 2일 10시간 14분이 소요됐다(Table 4).
Table 4.
Learning time and hyper-parameter settings for deep learning based rainfall prediction
| Type | Value | Type | Value |
| Loss function | MAE | Learning time | 2days, 10:14 |
| Optimizer | Adam | ||
| Learning rate | 0.0001 | ||
| Batch size | 8 | Activation | ReLU |
| Epochs | 40 | Dropout rate | 0.5 |
또한 딥러닝 학습을 진행하기 위하여 시스템 환경정보를 Table 5에 정리하였다. Windows OS 환경에서 학습일 진행하였으며, GPU는 NVIDIA TITAN RTX D6 (24GB)*2를 사용했고, 개발 환경은 Python 3.6.12, Tensorflow 2.1.0 버전을 활용하였다.
3. 연구 결과
본 연구에서는 U-Net++ 구조를 활용하여 특정 강우사상에 대한 선행시간별 강우 레이더 자료를 비교하였다. 강우 레이더 비교는 실제 레이더 관측값(observation), 기존 U-Net 구조로 예측한 결과, 그리고 개선된 U-Net++ 구조로 예측한 결과를 대상으로 진행하였다. 또한 시험셋에 대한 임계치별 CSI (Critical Success Index)와 RMSE (Root Mean Square Error) 값을 비교하여 학습 모델의 성능을 평가하였다. 이후 지상 관측소에서 측정한 강수량, 기존 강우 레이더, U-Net 및 U-Net++ 구조를 활용한 강우 레이더 자료를 바탕으로 소양강 유역의 누적 면적 강수량을 비교하였다.
3.1 학습된 딥러닝 모델을 통한 강우예측 및 성능 평가
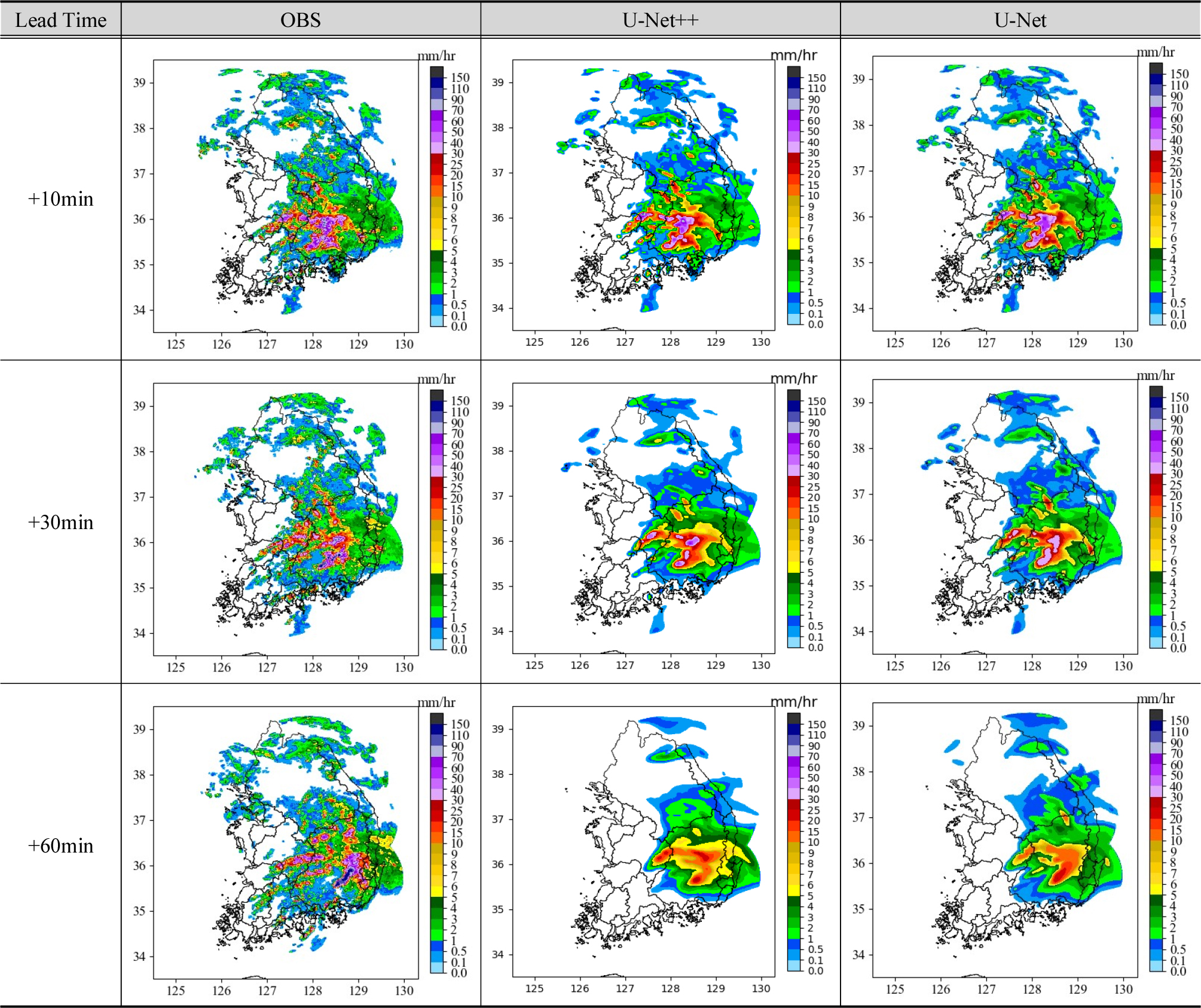
딥러닝 강우 예측 모형은 크게 데이터 구축 및 전처리, 모형 구조 설정, 하이퍼파라미터 설정, 모형 훈련, 성능 평가의 순서로 진행된다. 본 절에서는 앞서 언급한 대로 선행시간별 강우 레이더 자료를 분석하였다. 강우사상은 시험셋 자료(2021- 08-14, 01:10~2021-11-30, 21:00) 중 하나를 선택하였으며, 강우사상이 뚜렷하게 나타나는 시간대인 2021년 8월 21일 12:00와 2021년 8월 24일 10:30 자료를 선정하였다. Fig. 4는 2021년 8월 21일 12:00, Fig. 5는 2021년 8월 24일 10:30의 선행시간별 10, 30, 60분 후의 강우 레이더 예측 자료를 나타낸다.
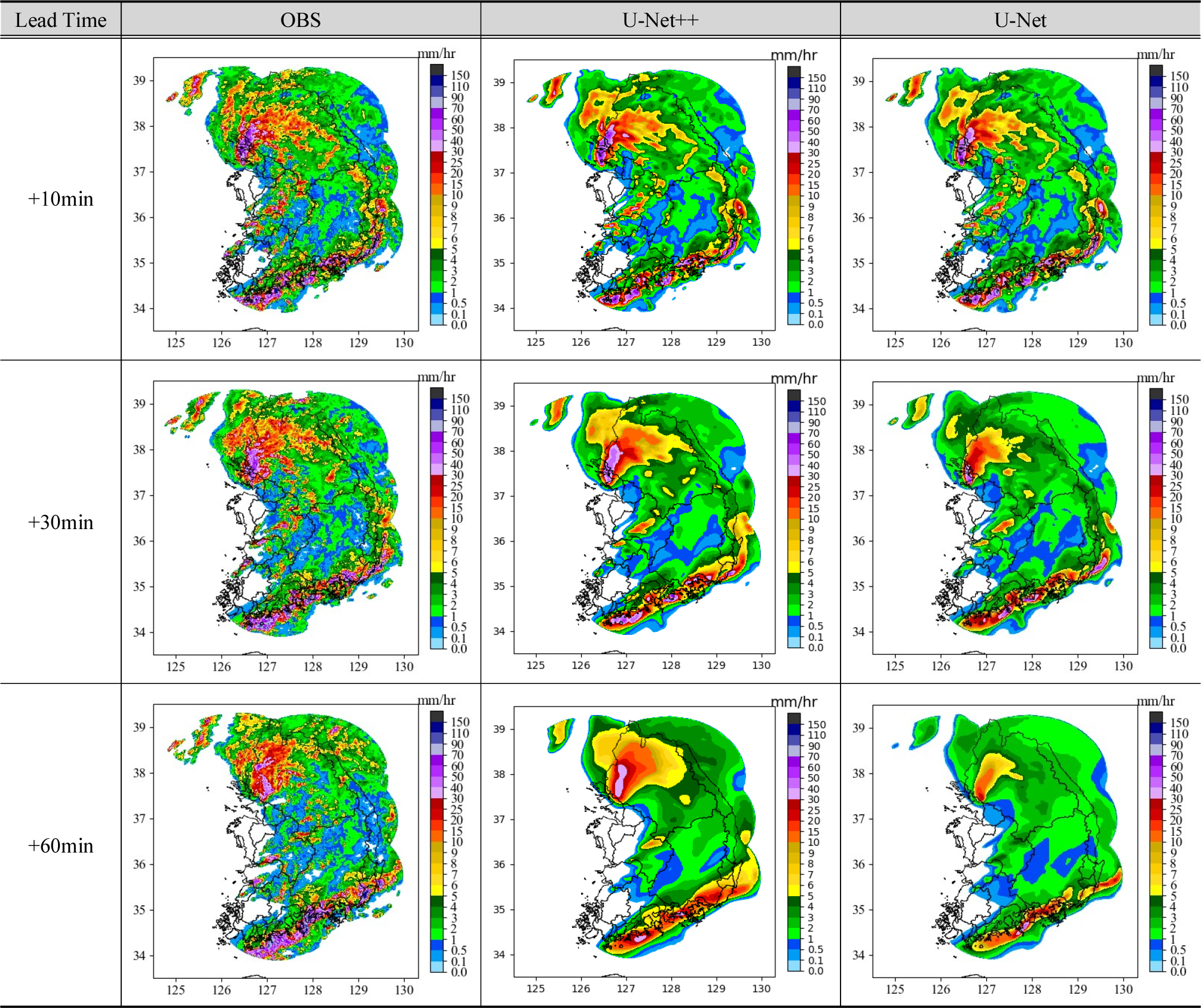
Fig. 4와 Fig. 5를 보면, 선행시간 10분 후의 예측값이 관측 레이더값과 유사함을 알 수 있다. 선행시간이 길어질수록 U-Net++ 구조의 모델이 강우 강도 예측에서 기존 모델보다 더 우수한 성능을 보였다. 또한, 전체적으로 기존 모델보다 블러링(blurring) 효과가 적은 것도 확인할 수 있었다. 이때 블러링 효과는 예측 선행시간이 길어짐에 따라 발생하며, 시간이 지남에 따라 예상되는 현상의 불확실성이 커지고, 이미지 해상도 및 세부 표현이 흐려지기 때문에 발생하는 현상이다. 그러나 두 모델 모두 선행시간이 길어짐에 따라 예측된 강우 강도가 실제 레이더의 강우 강도보다 감소하는 경향이 있었다. 또한, 시간이 지날수록 전국적으로 분포했던 강우가 우측(동해)으로 이동하는 경향이 있었고, 중부지방에서 강우 강도가 낮은 경우에는 예측 성능이 떨어지는 것을 볼 수 있었다. 시각적 검토와 함께 정량적으로 모델의 학습도를 검증하기 위하여 본 연구에서는 대표적인 평가지표인 CSI와 RMSE 값을 비교하였다.
레이더 자료를 활용하여 강우 발생을 판단하기 위해서는 임계치(threshold, T) 설정이 중요하다(Kang et al., 2016). 이 임계치를 토대로 학습 모형의 예측(simulation, S)이 관측값(observation, O)과 비교했을 때 얼마나 정확한지를 평가할 수 있다. CSI는 강수 분할표(Table 6)를 활용하여 산정되며, 관측값(O)과 예측값(S) 모두 임계치(T)를 넘는 경우는 성공(H), 예측은 했으나 관측되지 않은 경우는 오보(F), 실제 강수가 발생했으나 예측하지 못한 경우는 놓침(M), 관측과 예측 모두 강수가 발생하지 않은 경우는 없음(Z)으로 구분한다. CSI는 Eq. (2)과 같이 계산되며, 1에 가까울수록 예측 성능이 우수함을 나타낸다. 반면, RMSE는 예측한 강우레이더자료가 양적측면에서 정확히 모의되었는지를 확인할 수 있는 지표이다. RMSE는 평균의 제곱근 오차를 의미하기 때문에 작을수록 양적 측면에서 좋은 성능을 보여주며 Eq. (3)에 나타내었다.
Table 6.
Precipitation partitioning by threshold levels
| Contingency Matrix | Observation | ||
| Yes (O>T) | No (O≦T) | ||
| Simulation | Yes (S>T) | H (hit) | F (false) |
| No (S≦T) | M (miss) | Z (zero) | |
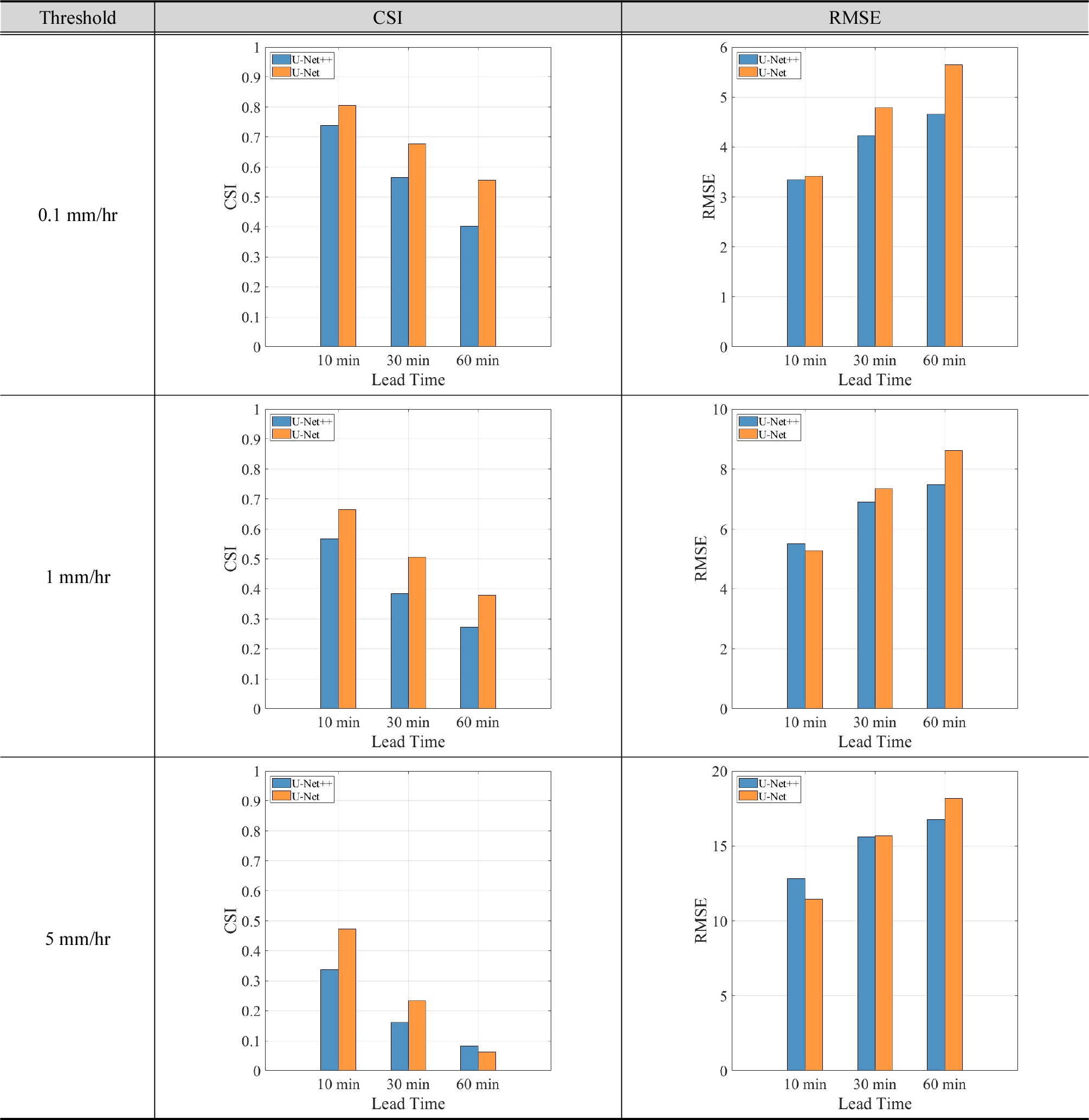
본 연구에서는 CSI와 RMSE를 이용하여 강우 임계치에 따른 선행시간별 모델 성능 평가를 진행하였다. 강우 임계치는 0.1 mm/hr, 1 mm/hr, 5 mm/hr로 나누어 선행시간별 180분까지의 CSI와 RMSE를 산정하였다. Table 7은 선행시간과 임계치별 CSI 값을, Table 8는 RMSE 값을 나타낸다. CSI의 경우, 기존 U-Net 모형의 값이 더 크게 나타나 강우 발생 여부에 대해서는 기존 모델이 상대적으로 우수함을 확인할 수 있다. 반면, RMSE는 개선된 U-Net++ 모형이 더 작은 값을 보여, 개선된 모델이 기존 모델보다 양적 예측 성능이 향상되었음을 나타낸다. 그러나 CSI와 RMSE 모두 임계치가 커지고 선행시간이 길어질수록 CSI는 작아지고 RMSE는 커지는 경향을 보인다. 이는 긴 예측 시간과 큰 강우 강도에 대한 예측 성능이 감소함을 의미한다.산정된 CSI와 RMSE는 예측 모델에 대한 선행시간별 평균값을 정리하였다. CSI의 경우, U-Net 모델이 상대적으로 우수한 성능을 보인 반면, RMSE는 일부 선행시간(임계치 1 mm/hr일 때 10분후, 5 mm/hr일 때 10, 20분후)을 제외하고는 U-Net++ 모델이 더 좋은 성능을 나타내는 것으로 확인되었다(Fig. 6).
Table 7.
Critical Success Index (CSI) by prediction lead time and precipitation threshold
Table 8.
Root Mean Square Error (RMSE) by prediction lead time and precipitation threshold
3.2 누적 유역면적 강수량의 비교
본 절에서는 지상 강우, 강우 레이더, U-Net++ 모형, 그리고 U-Net 모형을 활용하여 소양강 유역의 유역면적 강수량을 비교하였다. 지상 강우의 경우, 앞서 언급한 Table 3과 같이 기상청 기상자료개방포털 사이트에서 각 지점의 강수량을 수집한 후, Thiessen 방법을 이용하여 소양강 유역의 유역 면적 강수량을 산정하였다. 강우 레이더와 U-Net++ 모형, U-Net 모형의 경우에는 강우량이 격자 데이터 형태로 제공되며, 이를 활용하여 소양강 유역의 면적 강수량을 산정하였다. Fig. 7은 소양강 유역과 주변 16개의 지상 관측소를 나타낸 그림이다.
강우사상은 총 8개를 선정하여, 각각의 10분당 강수량을 구한 후 지상 관측, 레이더, U-Net++, 그리고 U-Net을 비교하였다. 선정한 강우사상은 Table 9와 같이 강우가 발생한 사상 중에서 선택한 8개의 강우사상이다. 지상 강우의 경우, 앞서 언급한 16개 지점에서의 10분당 강수량을 티센 폴리곤 방법을 통해 산정하였다. 강우 레이더 자료는 환경부 홍수통제소에서 제공받은 데이터를 활용하여, 강우사상에 맞는 소양강 유역에 해당하는 면적 강수량을 산정하였다. U-Net++와 U- Net 모델의 경우, 앞서 언급한 강우 레이더 자료를 바탕으로 딥러닝 학습을 진행한 후, 학습된 모델을 이용하여 선행시간 180분까지의 강우 레이더 자료를 출력하였다. 이를 통해 각각의 유역 면적 강수량을 비교할 수 있다.
Table 9.
Dates of selected rainfall events
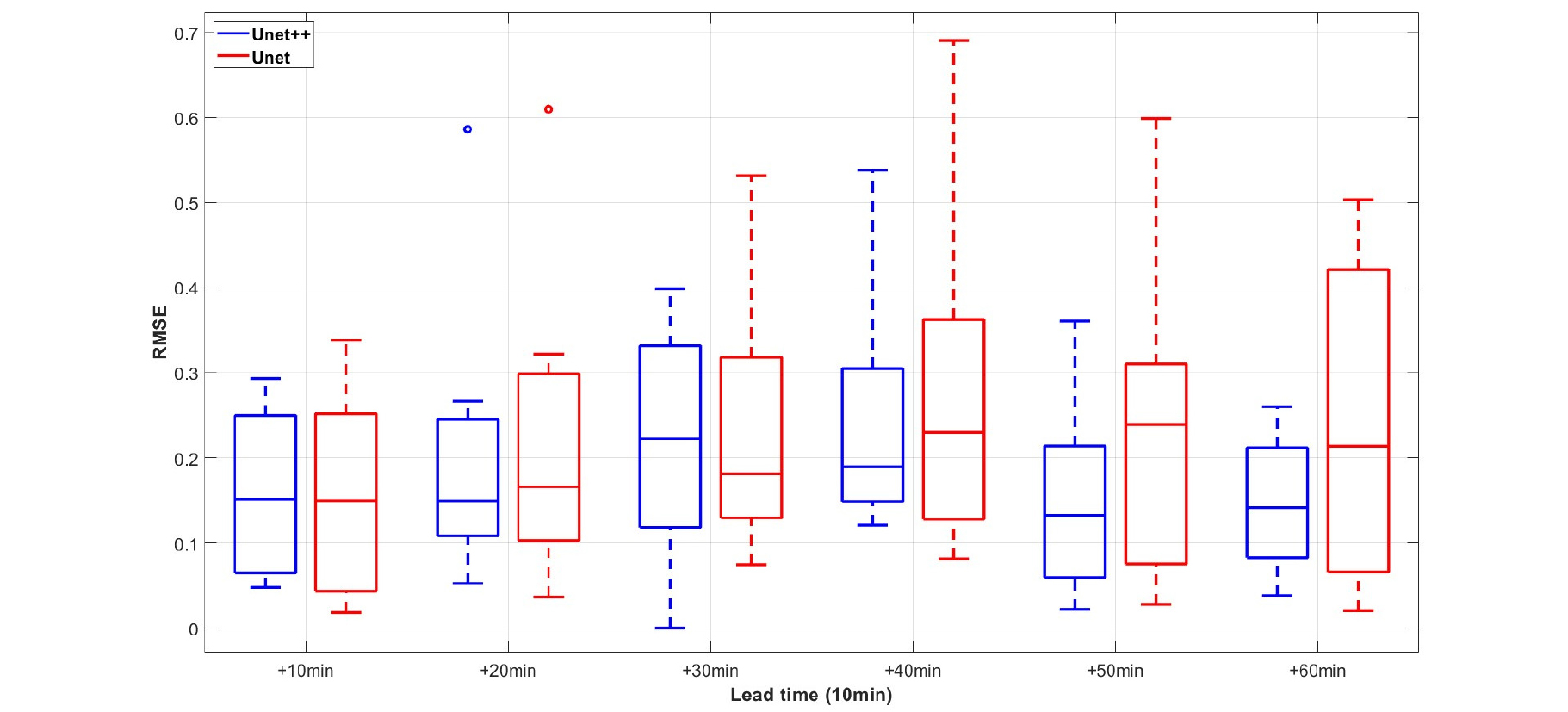
누적 유역 면적 강수량의 계산은 총 강수량을 평가하고 장기적인 수문학적 현상을 분석하는 데 필수적일 뿐만 아니라, 홍수나 가뭄 예방에 필요한 핵심적인 정보를 제공한다. 따라서 소양강 유역의 유역 면적 강수량을 산정한 후, 해당 유역의 일정 기간 누적 유역 면적 강수량을 계산하였다. Fig. 8은 각 강우 사상의 10분당 누적 유역 면적 강수량을 그래프로 나타낸 것이다. 예측 성능의 우수성은 Fig. 8의 강우 레이더 그래프(적색 부분)와 유사한 경향을 보이는 정도로 판단할 수 있다. 전반적으로 U-Net++ 모형은 선행시간이 길어짐에 따라 과대 추정되는 경향이 있지만, 60분까지의 누적 유역 면적 강수량 예측 성능이 기존 모형보다 우수하다. 특히 2021년 8월 31일, 9월 21일, 11월 8일과 같이 누적 유역 면적 강수량이 상대적으로 많은 강우사상에서 우수한 예측 성능을 보인다. 정량적인 비교를 위해 앞서 언급한 RMSE를 계산하였다. 강우 레이더 자료와 U-Net++ 모델, 그리고 강우 레이더 자료와 U-Net 모델 간의 RMSE를 계산한 후, Fig. 9에 선행시간 60분까지의 결과를 상자 그림(boxplot)으로 나타내어 성능 평가 지표의 분포를 확인하였다. 상자 그림을 볼 때 일반적으로 변동성이 적고, 예측 오차의 중앙값이 낮을수록 예측 성능이 더 좋다고 할 수 있다. 전반적으로 U-Net++ 모형이 더 낮은 사분위 범위(Interquartile Range, IQR)와 적은 이상치를 보여주며, 이는 예측 오차의 변동성이 적다는 것을 의미한다.
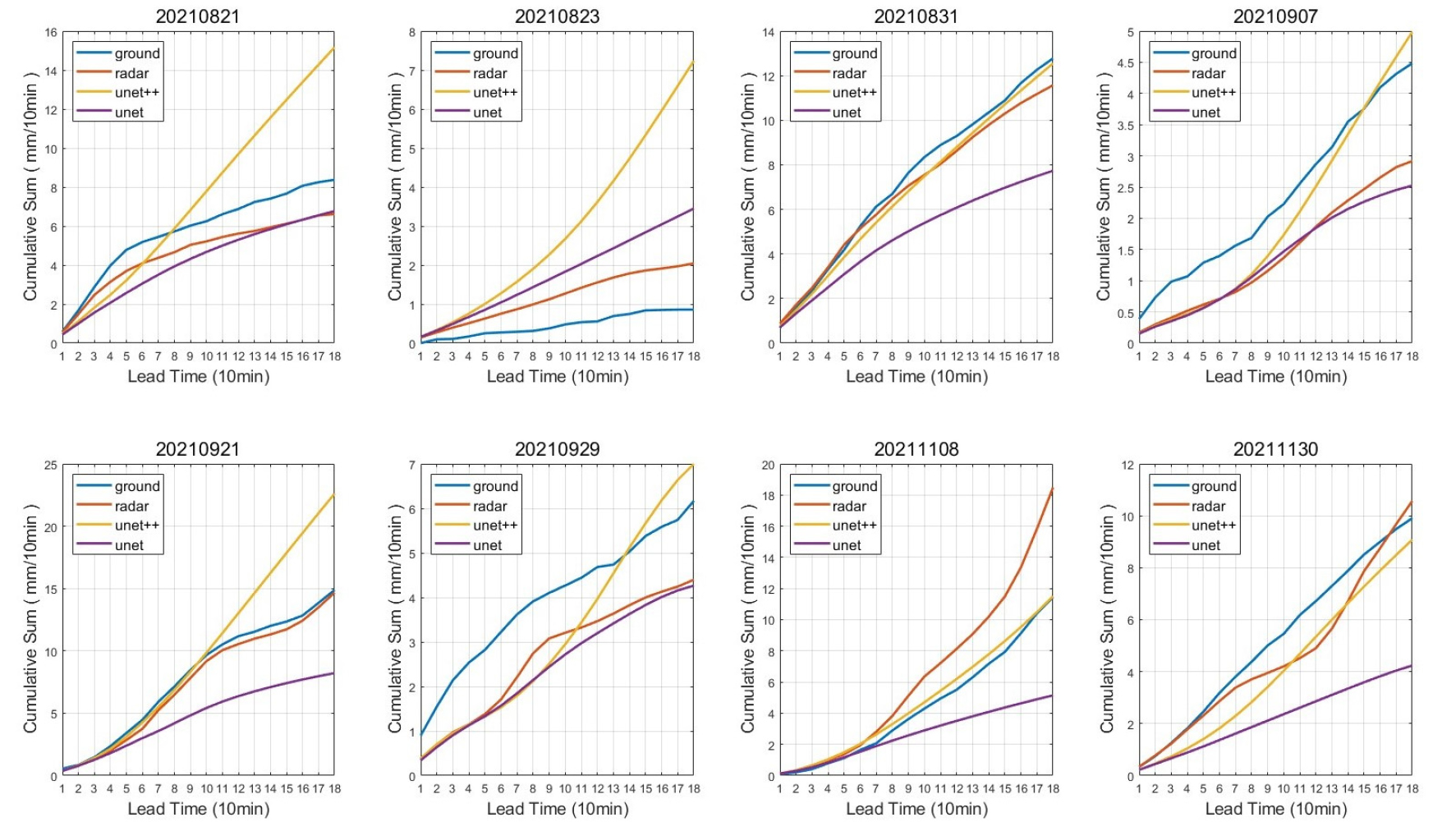
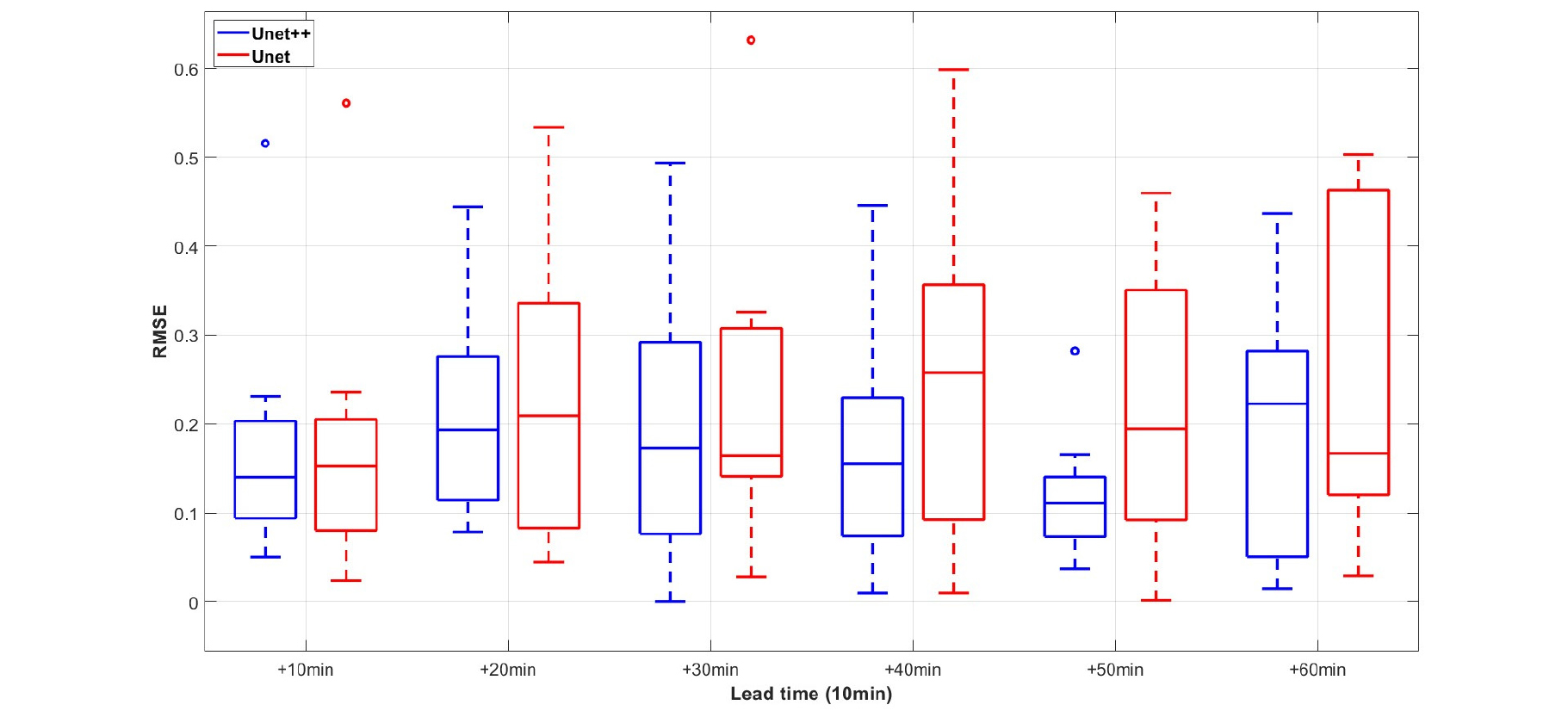
추가로, U-Net++ 모형과 U-Net 모형을 사용하여 지상 강우에 대한 누적 유역 면적 강수량을 비교하였다. Fig. 8을 보면, 전반적으로 U-Net++ 모형이 기존 U-Net 모형보다 누적 유역 면적 강수량이 지상 강우 그래프(청색 부분)와 더 유사함을 확인할 수 있다. 또한, Fig. 10의 상자 그림을 보면, 누적 유역 면적 강수량에 대해 U-Net++ 모형이 지상 강우에 대한 예측 성능이 기존 모형보다 우수함을 알 수 있다.
4. 결 론
최근 대량의 데이터와 컴퓨터 연산 기술의 비약적인 발전으로 인해 수문학 분야에서도 딥러닝 기술이 주목받고 있다. 특히 강우 레이더의 경우, 기존에는 외삽 기반의 방법이 주로 사용되고 있으나, 최근에는 대규모 데이터를 기반으로 한 딥러닝 방법이 시공간 변동성이 큰 강우 패턴을 예측하는 데 유리하다고 알려지고 있다. 선행 연구에서는 딥러닝의 방법 중 U-Net 모형을 활용한 강우예측을 진행하였다. 하지만 해당 모형은 짧은 선행시간의 강우 예측 성능은 뛰어났지만, 선행시간이 길어짐에 따라 예측 성능이 급격하게 저하되는 한계가 있었다.
따라서 본 연구에서는 기존에 사용했던 U-Net 모형보다 개선된 U-Net++ 모형을 활용하여 레이더 강우 예측 모형을 개발하였다. 이 모형을 통해 기존 모형과의 성능 평가를 진행하였다. 또한 홍수 예측 및 관리에 중요한, 수도권의 주요 수자원 공급원인 소양강 유역의 유역 면적 강수량을 계산하여 3시간 누적 강우량을 산정하였다. 이후 지상 강우, 강우 레이더, U-Net++ 모형, U-Net 모형을 활용한 비교를 수행하였다. 본 연구를 통해 얻은 주요 결과는 다음과 같다.
첫째, 성능평가 지표의 평균적인 값을 비교한 결과, U-Net++ 모형이 기존 U-Net 모형보다 개선된 것을 알 수 있었다. 개선된 모형은 기존 모형보다 공간적 성능이 향상되었으며, 합성곱 모형에서 일반적으로 발생하는 블러링 문제가 줄어들었다. 이는 U-Net++ 모형의 주요 차이점인 스킵 연결의 효과로 생각된다. 또한 모형의 성능 평가 시, 강우 임계치별 RMSE 값이 기존 모형보다 감소하는 것을 확인할 수 있었다.
둘째, 누적 유역 면적 강수량을 산정했을 때, U-Net++ 모형이 기존 모형보다 상대적으로 더 정확한 예측을 보였다. 소양강 유역의 유역 면적 강수량을 지상 강우, 강우 레이더, U-Net++ 모형, U-Net 모형을 사용하여 산정하였고, 각 강우 데이터의 누적 강우량을 비교한 결과, 개선된 모형이 기존 모형보다 누적 강우량 예측 성능이 전반적으로 우수함을 확인할 수 있었다.
향후 연구에서는 CSI 개선을 위해 다양한 손실 함수(Loss function)를 시도하여 강우 발생 여부 예측, 즉 CSI 개선을 목표로 할 수 있을 것이다. 또한, 본 연구의 결과에서 U-Net++ 모형이 전반적으로 과대 추정하는 경향이 있었는데, 이는 학습 데이터의 증가나 하이퍼파라미터 튜닝을 통해 과대 추정을 줄이면 강우 발생 및 강도 예측 성능이 더욱 향상될 것으로 기대된다.
본 연구는 Segmentation 기반에 대표적인 모형인 U-Net++ 모형을 활용하여 선행시간별 소양강 유역의 강우 예측을 수행하였으며, 이는 추후 수문학적 연구 및 수자원 관리, 특히 최근 기후 변화에 따른 단기간 홍수 예측 시스템에 적용될 수 있다. 이를 통해 조기 경보 시스템의 정확도를 높여 홍수로 인한 피해를 최소화할 수 있을 것으로 기대된다.
