

1. 서 론
2. 연구방법
2.1 대상지역
2.2 초분광 정보 측정 기기
2.3 대기 보정 및 수변공간 분류 기법
3. 연구결과
3.1 수변공간의 분류를 위한 분광정보
3.2 수변공간 분류 기법 및 적용
4. 결 론
1. 서 론
최근 드론 기술의 발전과 더불어 이에 탑재되는 초분광 센서를 이용하는 연구가 증가하고 있다. 이러한 연구는 원격탐사(Remote Sensing)의 분야로, 지상의 대상물을 촬영하거나, 취득된 데이터를 분석하는 학문이다. 이러한 촬영 기술 및 데이터 취득은 자연하천에도 적용된 바 있으며, 기존의 연구대로 직접 채집을 하거나 직접식 계측 방식에 의존한 방식과 비교하여 시공간적으로 효율적인 고해상도 자료의 취득이 가능해졌다(Marcus and Fonstad, 2010).
원격 탐사로 취득한 이미지에 분류 기법을 사용하는 연구는 토지 피복도 데이터 취득에 사용되어 왔다(Schmid et al., 2004). 촬영 이미지를 픽셀 단위로 구분 한 후 각 픽셀의 개별적인 정보를 이용하여 피복도를 구분하게 되었다. 이러한 종류의 연구는 다분광 이미지 및 초분광 이미지를 활용하여 각 픽셀에서 취득할 수 있는 분광 데이터를 다른 유사한 분광 데이터와 비교하여 분류하는 방식을 사용하게 된다. 그리고 토지 피복도 데이터 분류 시에는 의사결정 트리, 신경망, 기계학습 등의 분류 기법이 사용되기도 하였다(Pal and Mather, 2006). 추가적으로 도형 인식 기법들이 사용되었는데, 이 중 비지도 학습인 K-means, fuzzy 분류 기법들과, 지도 학습인 최대 가능성 분류기의 방식으로도 피복도 분류가 이루어졌다(Mather and Tso, 2016).
위성에 탑재된 다분광 센서를 이용한 이미지 취득으로 공간 분류를 하는 연구도 있었으나, 초기 위성 자료의 경우 낮은 해상도를 가지고 있어 상세한 수변 공간 분류가 어려운 점을 가지고 있었다. 이후 공간 해상도가 1 m 내외까지 향상된 고해상도 센서가 등장하면서 상세한 데이터 취득이 가능해졌으나 여전히 다중분광 센서가 가지고 있는 파장대의 개수의 제한점으로 대상물에 대한 분광특성 정보를 취득하는 데 한계가 있었다. 그러므로 본 연구에서는 상세한 수변공간 분류용 데이터 취득을 위하여 다분광 센서가 아닌 초분광 센서를 드론에 탑재하여 수변공간의 재료를 분류하고 그 특성을 비교하였다.
초분광 영상은 수많은 연속적인 밴드로 이루어져 있으며 높은 분광해상도를 지니고 있다(Van der Meer et al., 2012). 다분광 영상에 비해서 반사특성이 자세히 드러나기 때문에 촬영 대상의 특성을 확인할 수 있다. 일반 카메라의 경우 가시광선 영역의 적녹청 파장대의 취득으로 한정되어 있으나, 초분광 카메라의 경우 가시광선 영역 외에도 근적외선 영역의 파장대를 수 십, 수 백 개로 세분화하여 촬영하게 되어 다양한 스펙트럼의 빛을 감지할 수 있게 된다(Asner and Martin, 2009). 이러한 측정 방식을 이용하여 항공 측량을 통한 식생 및 토양 측정이 이루어졌다(Drake et al., 1999; Goetz, 2009). 특히 근적외선 영역은 가시광선 영역보다 파장대가 더욱 길면서 일반 사람의 눈보다 많은 정보를 담을 수 있어 데이터 취득과 계측에 사용된다. 특히 기존에는 특정 분광 밴드의 반사율이나 분광 밴드 반사율의 비율을 변수로 사용하여 회귀식을 산정하는 방식의 연구가 이루어지기도 하였다(Peterson et al., 1988; Kokaly et al., 2009; Stratoulias et al., 2015). 이러한 기법을 사용하는 경우 식을 산정하는 특정 지역별로 지역 특성이 각각 다르기 때문에 취득하는 데이터의 다양성과 더불어 필요 구역 별 데이터 확보가 중요하다. 특정 밴드를 사용하는 경우 계산 속도를 증가시킬 수 있어 효율적인 하천 분류를 할 수 있었으며, 이후에는 전체 초분광 밴드를 활용하여 공간 분류를 한 기법도 발전하였고 연구에 적용되어 왔다.
이러한 종류의 연구는 기존에는 위성을 사용한 원격탐사 연구로부터 주로 발전하였으며(Kwon et al., 2021) 넓은 영역을 대상으로 하였기 때문에 해양 및 연안환경 구역에 수행되었다. 상대적으로 아직 초분광 영상을 이용한 연구는 다분광 센서보다는 적으나, 기술의 발전으로 고해상도 초분광 영상의 취득 용이성이 증가하면서 점차 하천 및 수변공간을 대상으로 재료 분류 연구가 진행되었다(Kang et al., 2019). 특히 최근에는 초분광 영상을 이용한 수질항목의 농도 및 부유물질(Umar et al., 2018), 수심(Legleiter and Harrison, 2019) 등의 다양한 정보 계측이 이루어지고 있다.
계측 분야 중 본 연구에서는 이미지의 분류 기법을 이용하여 수변 공간의 구성 재료를 구분하고자 하였다. 기존의 초분광을 이용한 공간 분류 연구는 회귀식을 이용하여 지역에 부합되는 특성 데이터를 구축하여 공간 분류를 구성하였는데, 본 연구에서는 비지도 학습 및 지도학습 분류 기법을 사용하여 수변 공간을 분류하고자 하였다. 기존 연구에서는 지상 분광 측정기를 이용한 직접 측정 방식과 비교가 이루어지지 않은 점을 고려하여 본 연구에서는 드론 탑재 초분광 센서를 이용한 수변 재료 분광 정보를 취득하고, 이를 지상 분광 측정기를 통해 취득한 재료 분광 정보와 비교하여 검증하였다. 이후 검증된 드론 취득 초분광 이미지를 활용하여 수변 공간 재료 구분을 수행하였다.
2. 연구방법
2.1 대상지역
본 연구의 대상지역은 Fig. 1과 같이 4대강의 남한강 유역으로 강천보 상류 1 km 의 연양지구공원 주변에 위치해 있다. 해당 지역의 본류는 강천보에 의해 관리 수위가 유지되고 있으며, 강우 시 상류에 위치한 여주보의 방류를 통해 일정한 유량을 유지하고 있다. 연구지역의 수변 공간에는 도로, 건물 등의 인공구조물, 토양, 식생 등의 다양한 하천환경 인자로 구성되어 있다.

2.2 초분광 정보 측정 기기
본 연구에서 활용된 초분광 센서는 Corning MicroHSI 410 Shark로 150 개의 밴드로 파장대를 구분할 수 있어 상세한 데이터 취득에 용이하면서 GPS가 기본 탑재되고 0.68 kg의 경량화가 이루어져서 드론에 설치가 가능하다. 활용한 드론은 DJI 의 Matrix 200으로 최대 탑재 중량 2 kg의 사양으로 약 25분간 비행이 가능하다. 지상 측정을 위해 활용된 휴대용 지상분광 측정기 센서는 SE 2030 VNIR로 1950개의 밴드로 상세한 파장대 구분이 가능하여 드론 탑재 초분광 센서 데이터를 검증하기 위해 사용하였다. 각 센서의 정보는 다음 표와 같다(Table 1).
Table 1.
Sensor specifications
| Sensor | Corning MicroHSI 410 Shark | SE 2030 VNIR |
| Number of Bands | 150 | 1950 |
| Range of Wavelength | 400~1000 nm | 350~1020 nm |
| Weight | 0.68 kg | 0.50 kg |
| Resolution | 704 × 155 | 1 × 1 (point) |
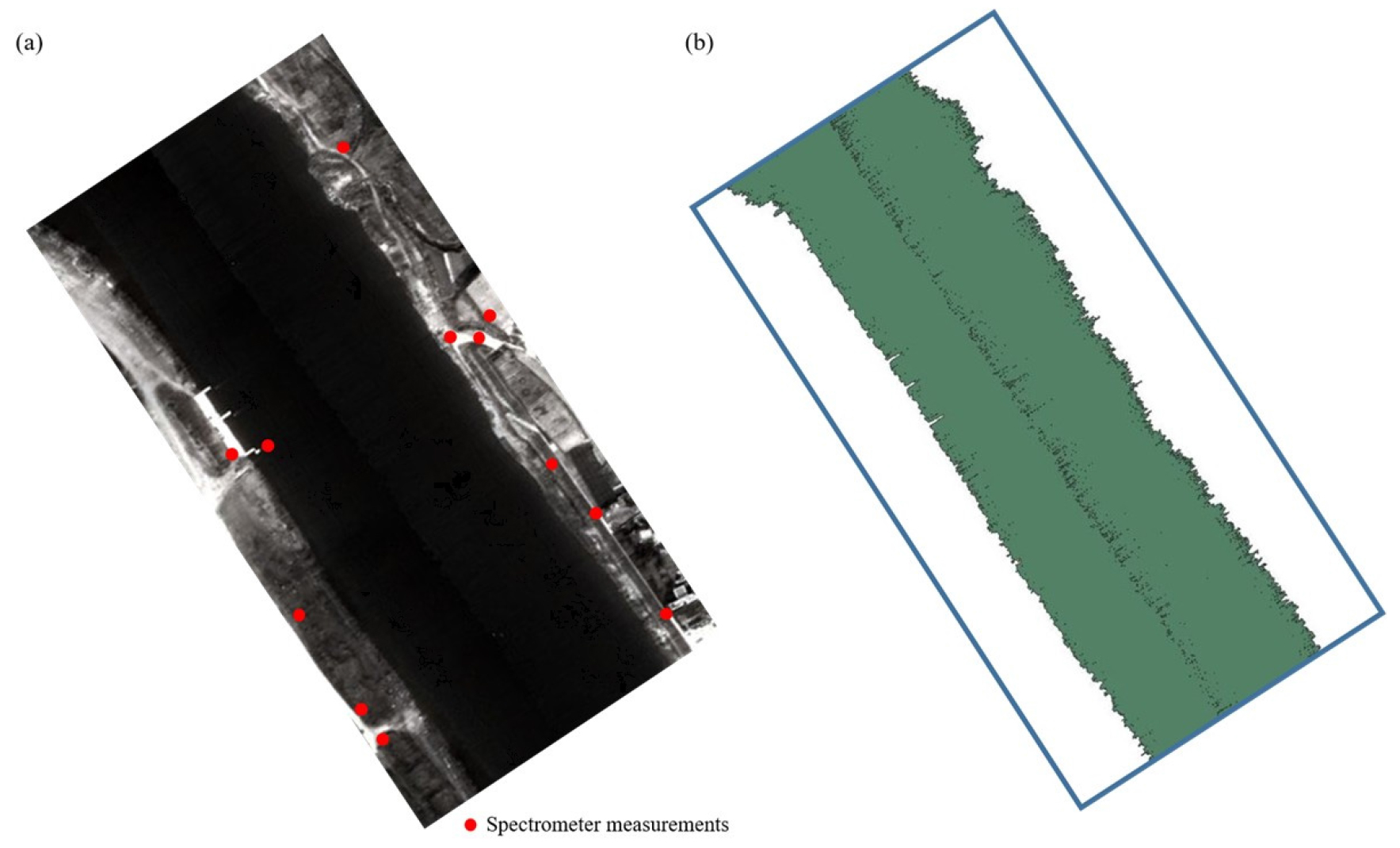
초분광 이미지 초기 분석은 QGIS 3.1 버전 및 Harris Geospatial Solutions 사의 ENVI 5.6를 사용하였다. SE 2030 VNIR 지상분광 측정기를 통하여 현장 지점 계측을 수행한 부분은 Fig. 2(a)에 표기하였다. 수변공간의 분광 정보를 분석하고 분류하기 위해서 식생, 콘크리트, 흙 등의 초분광 영상촬영을 실시하고 경로별로 형성된 복수의 초분광 영상의 합성 결과는 Fig. 2(b)와 같다.
2.3 대기 보정 및 수변공간 분류 기법
초분광 영상에 적용이 가능한 대기 보정 알고리즘 프로그램으로 ATCOR-4를 사용하였다. 후처리 과정에서 드론의 초분광센서로부터 700~800 nm 파장대의 수증기 자료 및 기상청의 자료를 입력하여 보정 영상을 생성하였다. 이후 측정된 구역의 이미지를 활용하여 ENVI 프로그램으로 각 재료의 고유 파장대를 식별하기 위하여 픽셀별로 파장대를 정리하였다. 각 측정 지점별로 5개의 측정값의 평균값을 사용하였으며 백색판을 이용한 방사보정을 통하여 초분광영상의 화소값을 반사율(reflectance)로 변환하여 값을 산정하였다.
본 연구 구역의 수변공간 재료 구분을 위한 분류 기법 중 클러스터링 방식을 도입하였다. 클러스터링 기법은 K-means, spectral clustering 등 여러 가지 기법이 있으며, 사용되는 알고리즘이나 데이터의 형태에 따라서 구분 속도나 성능에 차이가 존재한다. 이러한 클러스터링 기법 중 K-means 군집화 알고리즘의 경우 분할 기법 중의 하나로, 주어진 데이터를 여러 개의 군집으로 나누는 방법이다. 우선 n 개의 중심점을 선정한 후, 각 중심점에서 개별 데이터의 거리를 산정한 다음 그 거리의 합이 가장 최소화되는 n의 위치를 발견하면서 각 중심점으로부터 가까운 점들을 묶는 알고리즘이다. 결과적으로 구분된 각 군집의 데이터의 평균값이 중심점이 되기 때문에 평균값(means) 알고리즘으로 불린다. 이 알고리즘에서 사용하는 공식은 다음과 같다.
여기서 는 관찰된 데이터, 는 각 군집의 중심점, 는 개별 군집을 의미한다. 중심점으로부터 데이터 값과의 거리가 최소화되는 중심점을 구하는 것을 확인할 수 있다.
이와 같이 비지도학습으로 K-means 군집화를 진행한 경우 데이터의 훈련 없이도 수변 공간의 신속한 분류가 가능하나, 처음에 분류한 표본을 지정한 후 공간분류가 진행되는 것이 아니라. 공간 분류 후 해당 표본과 연결하여 확인하는 부분이 단점이 될 수 있는 점을 확인할 수 있었다. 이에 표본을 지정한 후 지도 학습 방식인 SVM (Support Vector Machine) 의 기법도 사용하여 이를 통한 수변 공간 분류도 수행하였다.
SVM은 분류 기법 중 기계 학습을 이용한 방식으로, 데이터 모집 집단을 구분할 수 있는 최적의 평면을 찾는 알고리즘이다(Vapnik et al., 1997). 기존의 패턴 인식 문제를 해결하기 위한 구분 기법으로 개발되었으며, 차원공간에서 분류되는 데이터들을 구분할 수 있는 기준 평면인 초평면(hyperplane)을 찾는 기법이다(Jeong and Youn, 2020). 이러한 기준 평면을 찾기 위해서 구분 기준 평면을 분류 데이터로부터 가장 거리가 먼 곳으로 결정하여 적합한 구분 기준을 구성한다. SV의 Support Vector는 이러한 구분 기준으로부터 가장 가까이 있는 데이터를 의미하며 이 데이터들이 구분 기준을 정의하는 역할을 하게 된다. SVM 의 결정 함수는 다음과 같다.
여기서 는 초평면의 법선 벡터이며, 는 데이터의 집합, 는 원점과의 거리이다.
선형 형태의 SVM의 경우 선을 활용하여 데이터를 분류하지만, 본 연구에는 선형으로 분리되지 않는 데이터 군집들이 많이 존재하기 때문에 SVM을 비선형 형태로 구현하기 위하여 커널 함수를 도입하였다. 공식은 다음과 같으며, 커널 함수로는 RBF (Radial Basis Function)을 사용하였다(Ishida et al. 2018).
여기서 는 비선형 형태로 구현하기 위한 표준편차의 크기를 결정하는 매개변수이다.
3. 연구결과
3.1 수변공간의 분류를 위한 분광정보
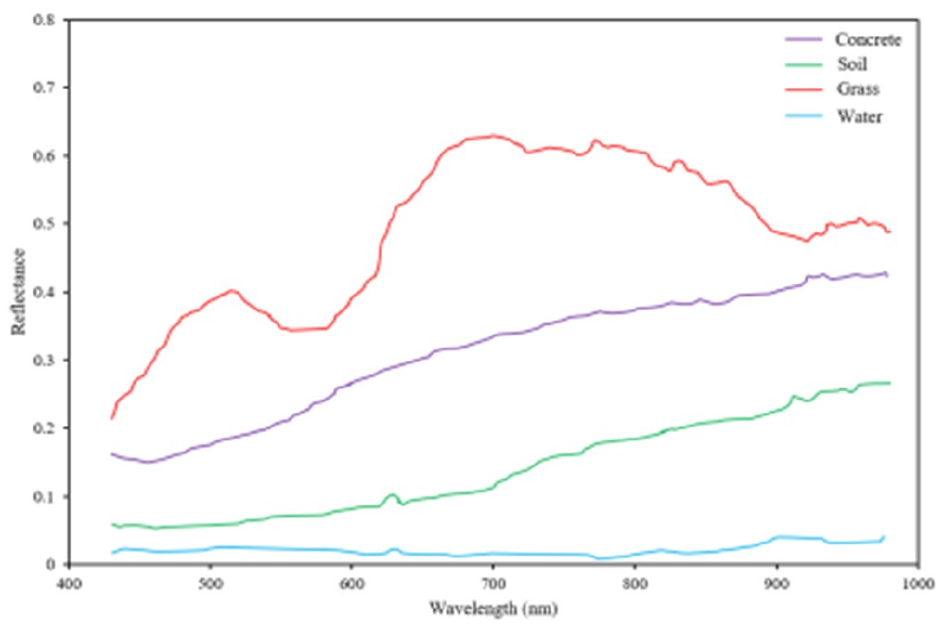
본 연구의 대상지역에서 아래와 같은 수변 공간재료의 분광 정보 분석을 수행하고 이를 기존 연구 자료와 비교하고자 하였다. 수변 공간 재료의 분광 정보 위주로 분석하였으며 드론 측정 시 재료의 크기는 직접 고려하지 않았다. 본 연구에서 사용한 MicroHSI 410 초분광 센서는 150 여개의 분광 밴드를 가지고 있었으며 측정 자료를 이동 평균하여 사용하였다. 구분 가능한 수변 공간 재료는 4 가지의 재료(식생, 콘크리트, 흙, 물)로 분류하였으며, 각 재료의 파장대를 우선 분석하였다. 분류 결과에 영향을 줄 수 있는 정합 구역은 하천 중앙 부분이며 이 부분을 제외하여 분석하였다. 측정 지역의 표본을 각각 분류하여 나타낸 분광 반사 결과는 다음과 같다(Fig. 3).
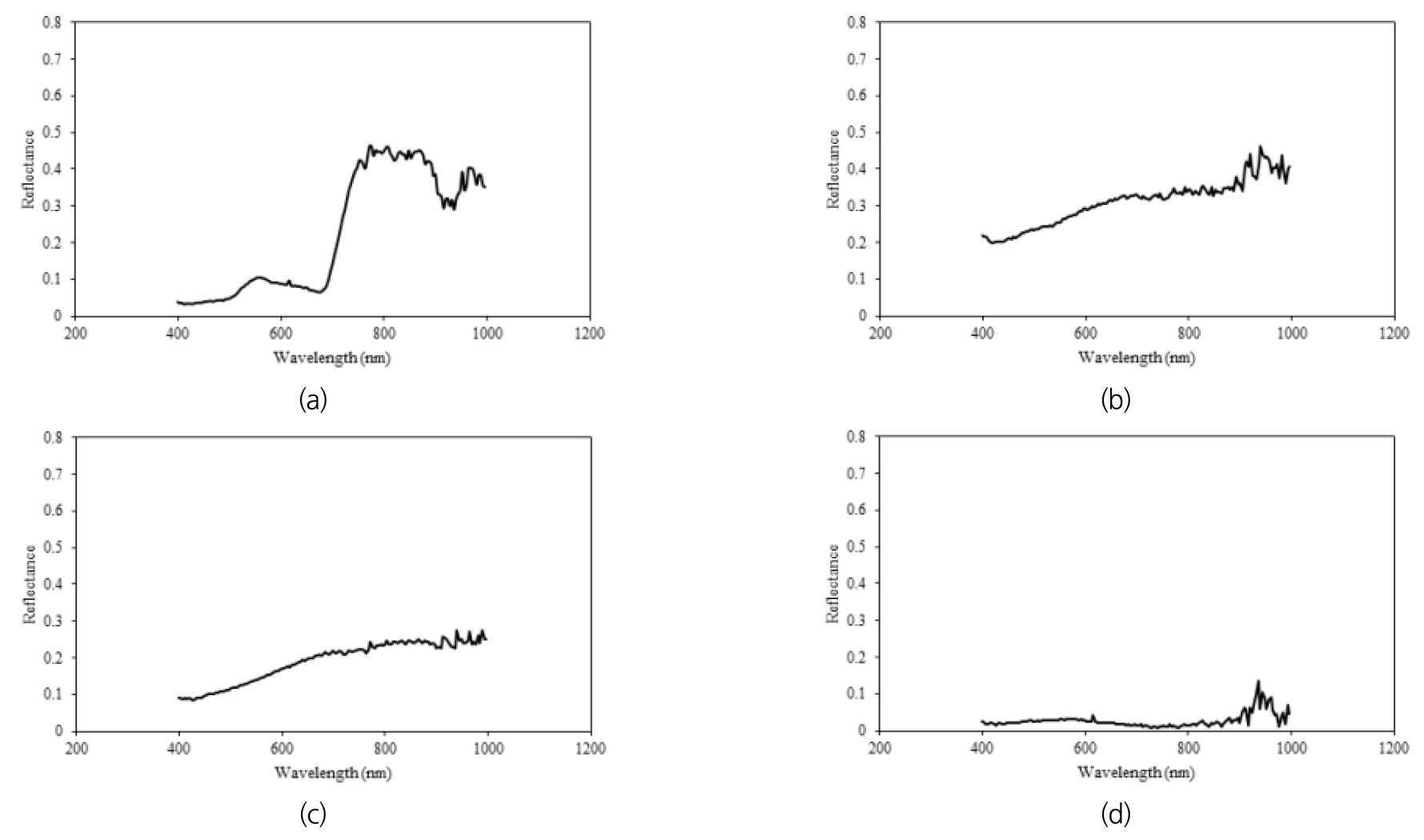
분광정보를 분석하면 식생의 경우 400 nm 에서 600 nm 대의 반사율이 낮고 700 nm 이상의 파장대에서 큰 변화를 보이고 있었다. 식생의 경우 엽록소가 녹색과 근적외선 파장대를 반사하고 파랑색과 빨간색의 파장대를 흡수하여 위와 같이 550 nm 대의 반사율이 다소 증가하는 형태가 나타남을 확인할 수 있었다. 그 결과로 가시광선 대에서는 낮은 반사율이 나타나며, 대신 근적외선 영역에서는 상대적으로 높은 값이 관찰되었다. 물의 경우, 녹색 파장대인 500 nm 이상 600 nm 부근에서 반사율이 상승하다가 다시 하강하는데, 이는 물의 특성으로 인하여 녹색 파장대를 반사하고 나머지 가시광선 영역은 흡수해서 나타나는 현상으로 판단된다. 콘크리트의 경우 파장대가 600 nm 까지는 높아질수록 반사율이 상승하는 형태를 보이고 있었으며, 700 nm 의 반사율부터는 상승폭이 정체되었다. 흙의 경우 콘크리트와 형태가 유사한 반사율을 보였으나, 반사율 값은 콘크리트보다 낮게 형성되었다. 표본을 각각 분류한 이후 이 결과를 USGS의 분광 라이브러리 자료와 비교하였다(Clark et al., 2007). 비교 결과는 다음과 같다(Fig. 4).
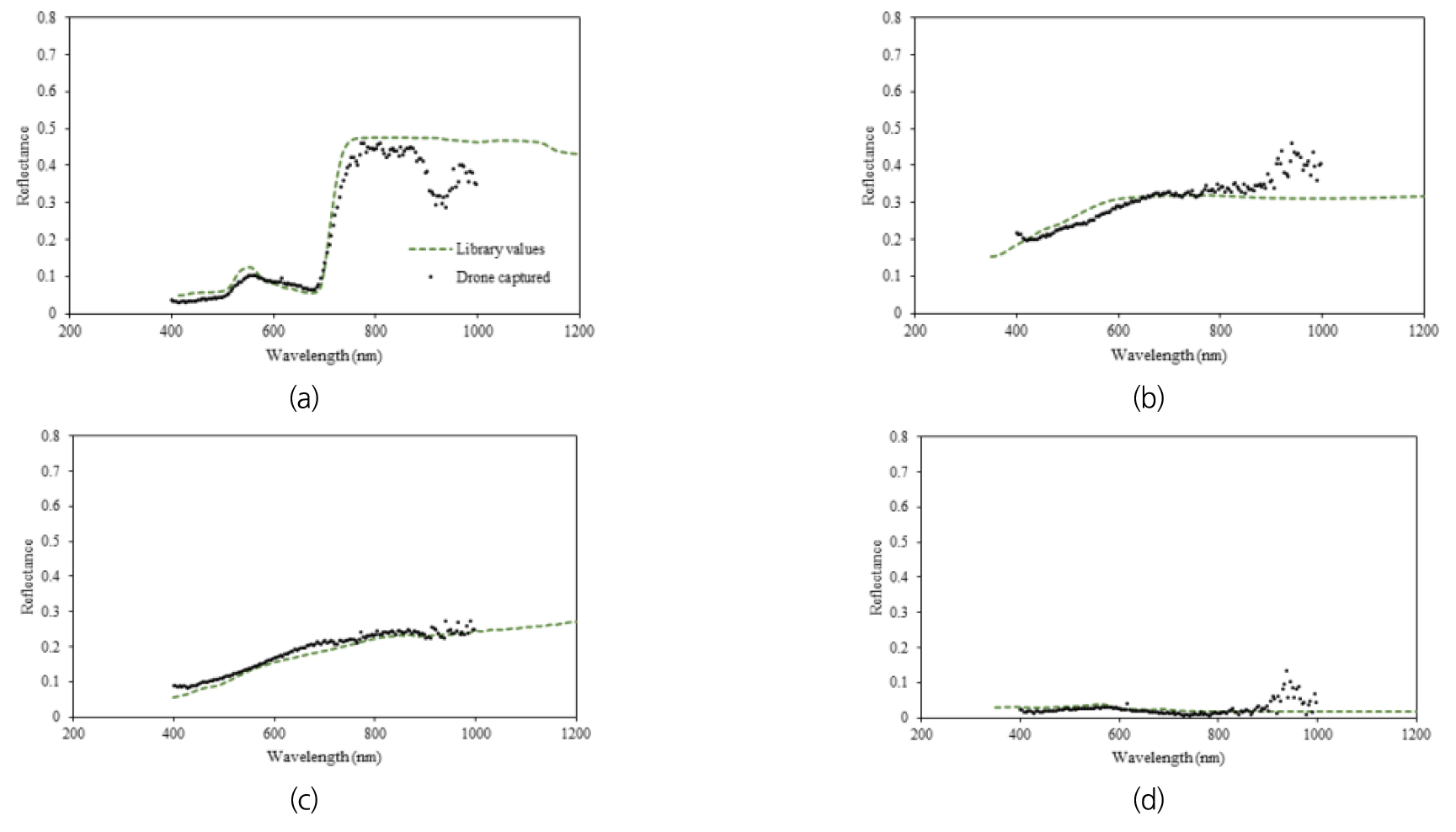
분광 라이브러리 비교 결과, 기존 문헌을 통하여 제시된 분광 특성과 측정된 초분광 데이터가 유사하다는 것을 확인할 수 있었다. 추가적인 검증을 위해 지상 측정용 휴대용 분광기를 사용하여 지점별 초분광 정보를 측정하여 정리하였다. 연구 대상 지역의 14개 지점을 현장 측정하였으며 재료별로 각 3번 측정 후 결과를 평균하여 자료를 정리하였다. 결과적으로 분광기를 사용할 때의 초분광 측정 결과와 드론에 장착된 카메라를 이용한 초분광 이미지 획득 자료의 초분광 측정 결과를 비교하여 유사한 점을 확인할 수 있었으며, 드론 장착 초분광 센서로 계측된 분광 정보의 정확도를 검증할 수 있었다(Fig. 5).
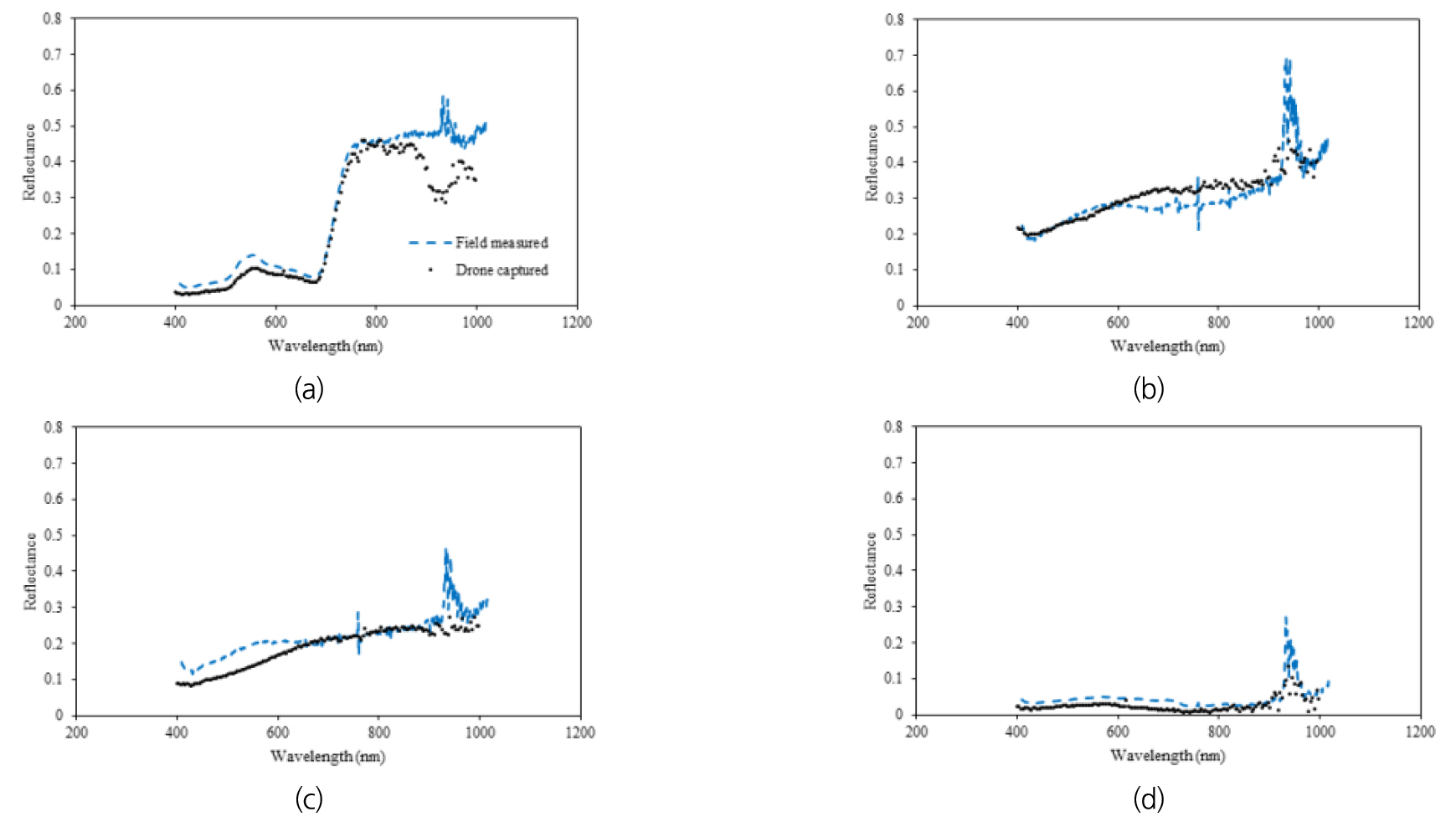
검증 결과를 정량적으로 분석하기 위하여 각 재료별 측정 기법간의 상관성을 분석하였으며 피어슨의 곱 모멘트 상관 계수의 제곱값을 사용하였다.
여기서 는 드론 탑재 센서 활용 측정값, 는 지상분광기 활용 측정값이다. 각 방식을 활용한 측정값의 상관성 분석 결과는 Table 2와 같다. 식생과 물에서 상대적으로 높은 상관성을 확인할 수 있었으며, 콘크리트 및 흙의 경우 상관성이 낮은 현상을 확인하였다. 이는 지상 분광측정기의 경우 측정되는 지점의 범위가 초분광 센서의 픽셀보다 크기가 작아 콘크리트 및 흙의 구성 성분의 일관성이 적어서 발생하는 결과로 판단된다.
Table 2.
Correlation between measurement methods by materials
| Material Type | Grass | Concrete | Sand | Water |
| Correlation coefficient | 0.86 | 0.64 | 0.65 | 0.73 |
3.2 수변공간 분류 기법 및 적용
위에서 제시된 K-means 군집화 알고리즘을 이용하여 수변 공간의 분류를 진행하였다. 비지도 학습 군집화 방식으로 훈련 데이터 없이 데이터의 특징 요약과 군집을 수행하도록 하였다. 비지도 학습의 경우 목표 값을 정하지 않고 데이터끼리 묶어서 데이터의 평균값을 구하는 방식으로 속도가 빠른 장점이 있다.
수변공간의 분류를 위하여 연구 대상 지역의 픽셀 당 파장대를 추출하여 분류를 진행하도록 하였다. 연구 대상 지역은 3470 × 4219 개의 픽셀로 이루어져 있었으며, 각 픽셀당 150개의 초분광 밴드 데이터로 이루어져 있었다. 우선 USGS의 분광 라이브러리를 이용하여 측정값과 밴드 반사율의 상관관계를 이용하여 기초 분류를 실시하였다(Fig. 6).
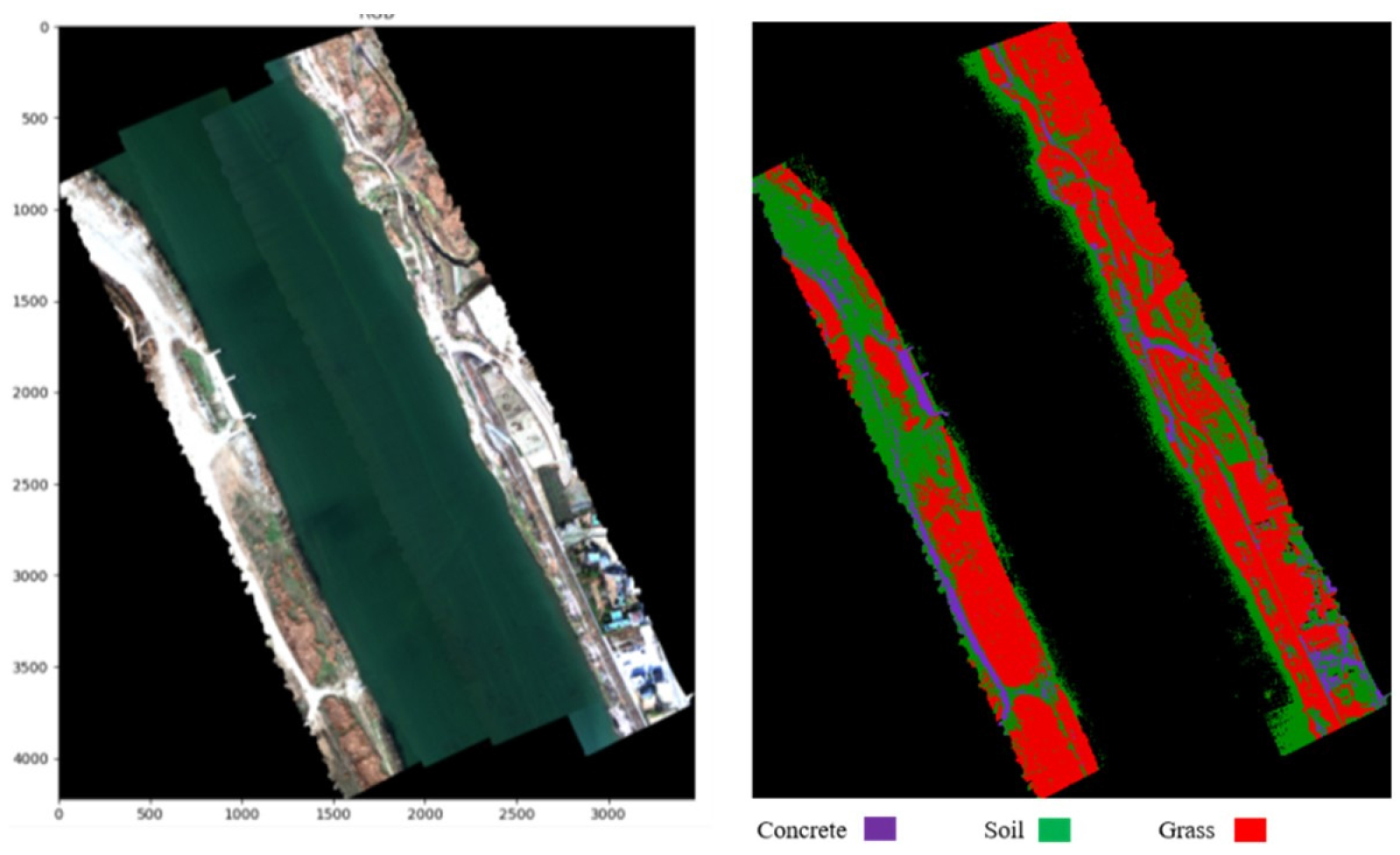
다음으로 초분광 촬영 구간을 토대로 K-means 군집화를 진행하였다. 우선 공간의 각 픽셀 당 분광 정보를 취득하여 이를 물을 제외한 분광 특성을 지닌 3개의 형태로 군집화 하였다. 초분광 밴드의 반사 특성을 기반으로 K-means 군집화를 수행한 결과, 각 재료별로 구분된 고유 파장대를 확인할 수 있었으나, 식생 분광대의 경우 위에서 측정된 분광 스펙트럼을 정확하게 구현하지는 못하였다(Fig. 7).
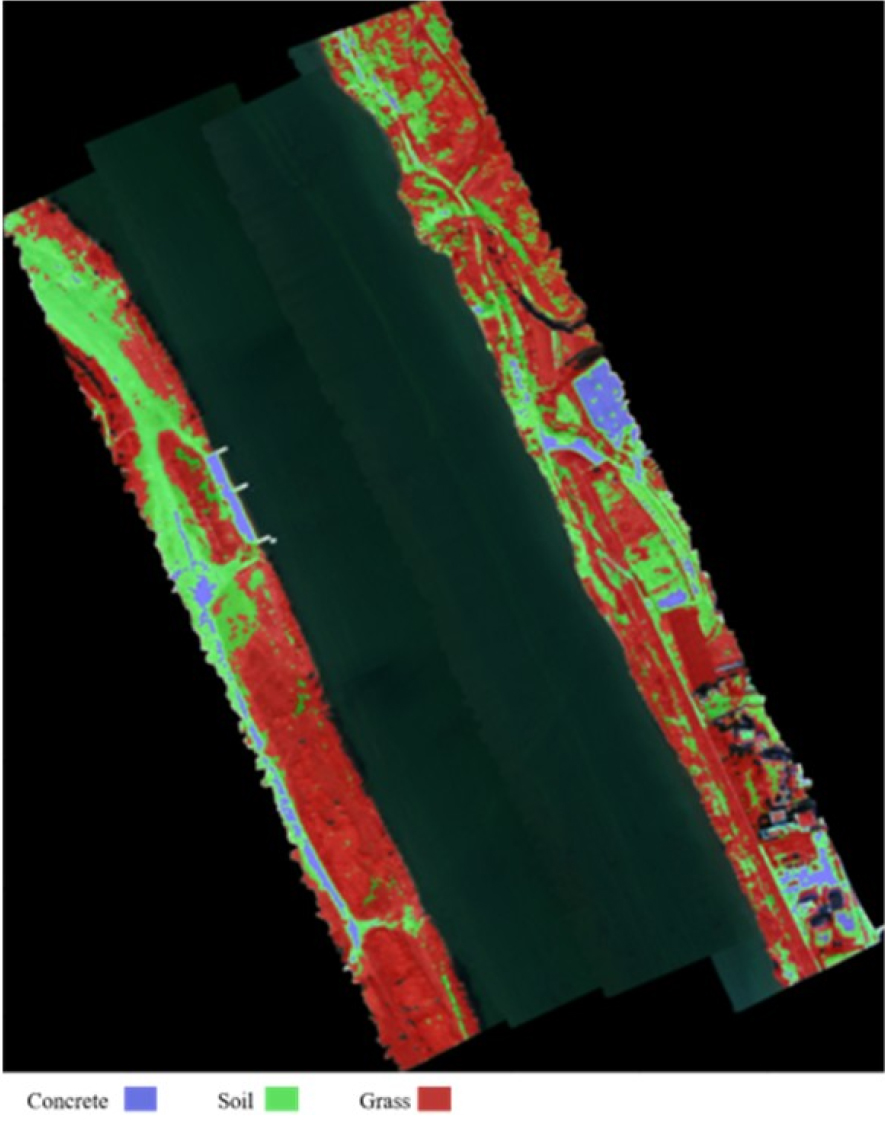
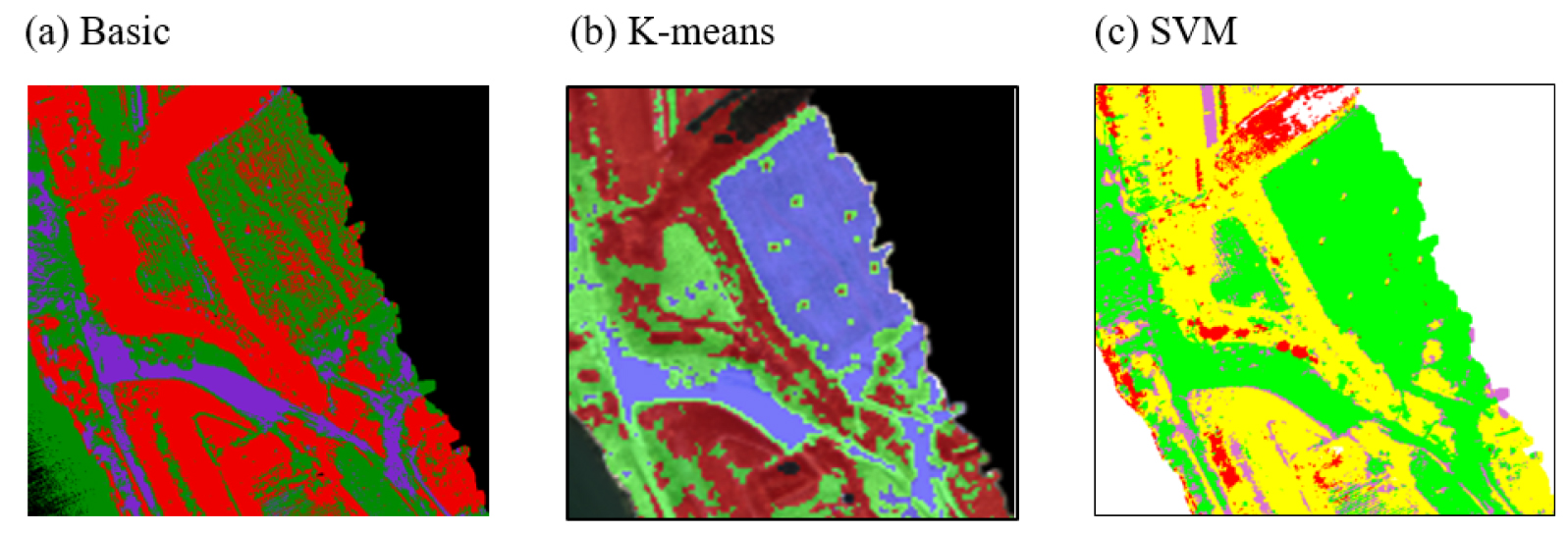
이어서 파장대 별로 분할한 수변공간의 분류를 수행하였다(Fig. 8). 제시된 식생, 흙, 콘크리트 구분이 어느 정도 이루어진 것을 확인할 수 있어 기초 수준의 수변 공간 구분이 완성되었다. 식생은 다른 종류의 표본보다 비교적 높은 분류 정확도를 보였으나, 건물과 같은 인공구조물의 경우 분류가 수행되지 않는 구역이 발생하였으며, 지역별로 흙과 콘크리트의 구분도 제대로 이루어지지 않아 자연물이 아닌 경우 분류 정확도가 낮은 경향을 보이고 있었다. 또한 그림자 영역의 경우에도 다른 군집으로 분류되는 경우가 있어서 정확도에 영향이 있다는 것을 확인할 수 있었다. 흙과 콘크리트의 상세한 구분을 위하여 4 개의 군집을 이용한 수분 공간 분류도 시도하였으나 부정확한 값이 발생하여 수변공간 구분 재료는 3개로 정리하였다.
Fig. 8과 같이 비지도학습으로 K-means 군집화를 진행한 경우 데이터의 훈련 없이도 수변 공간의 신속한 분류가 가능하였으나, 처음에 분류한 표본을 지정한 후 공간분류가 진행되는 것이 아니라. 공간 분류 후 해당 표본과 연결하여 확인하는 부분이 단점이 될 수 있는 점을 확인할 수 있었다. 이러한 단점을 극복하기 위하여 다음으로 지도 학습 방식인 SVM의 기법을 사용하여 수변공간 분류를 수행하였다. K-means 기법에서 발생한 흙과 콘크리트 구분 문제를 해결하기 위하여 흙과 콘크리트가 혼재하는 구역도 학습하였다. Fig. 2의 지상 분광기 측정 지점과 동일한 드론 측정 초분광 이미지 지점을 SVM의 학습 대상으로 선정하고 흙과 콘크리트가 혼재하는 구역이 포함된 4 가지의 재료 특성을 학습시켰다. SVM에서 실측자료 선택을 통해 분류군 별로 관심 영역(Region of Interest, ROI)를 지정하고, 이에 대한 학습을 통하여 분류 기준을 선정한 다음, 전체 공간에 대한 분류를 진행하였다. 커널 함수의 상수 는 0.5로 지정하였다(Ishida et al., 2018). SVM을 비선형 형태로 구현하기 위하여 커널 함수로 RBF를 도입하여 진행하였으며, 이를 통해 구분된 수변 공간은 Fig. 9와 같다.
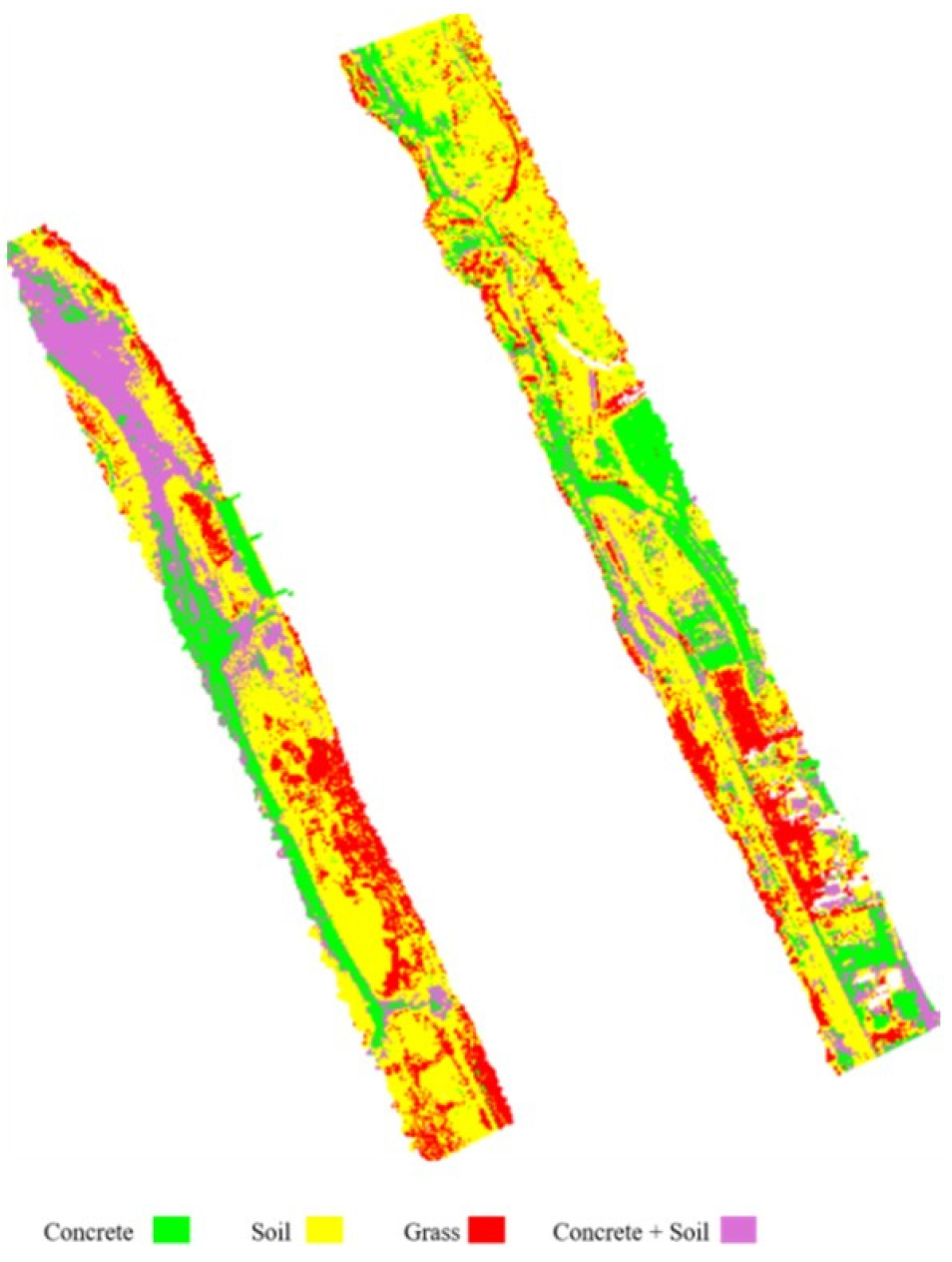
지도학습으로 SVM 기법을 이용한 수변공간 분류를 진행한 경우 K-means 기법에 비하여 상대적으로 흙과 콘크리트 구별을 명확하게 할 수 있었으며, 이는 초기에 표본을 지정한 지도학습을 통해 분광특성의 공통점이 많은 수변공간의 구분이 가능하게 되어 높은 분류 정확도가 나타남을 알 수 있었다. 특히 수변공간에서 콘크리트로 이루어진 도로 및 시설이 흙으로 덮여 있는 공간의 경우 비지도 학습 방식으로 구분의 한계점이 있는 지역을 표본 지정 지도학습으로 정확한 분류가 이루어짐을 확인하였다. 인공구조물의 경우도 비지도학습에 비해서 더 명확한 구분이 수행된 것을 발견하였다. 분광기를 이용한 측정구역의 일부분 지역의 토양 분류와 비교하여, 라이브러리를 이용한 기초 분류, K-means 분류 기법, 그리고 SVM 기법을 이용한 재료 분류 결과는 Table 3 및 Fig. 10과 같다.
Table 3.
Comparisons between classification methods to ground classification in selected area
| Class | Basic (%) | K-means (%) | SVM (%) |
| Concrete | 74 | 79 | 88 |
| Soil | 70 | 73 | 81 |
| Grass | 39 | 49 | 65 |
정량적인 비교 결과에서도 SVM기법이 단순 상관관계를 이용한 분류 방식과, K-means 분류 기법보다 더 정확한 결과를 보여주었다. 그러나 SVM의 경우 지도학습의 단점으로 높은 계산 시간이 소요되었으며, 이는 향후 연구를 통하여 주성분 분석 및 주요 밴드 선택 연구를 진행하여 학습되는 밴드 수를 줄임으로써 해결될 것으로 판단된다. 결론적으로 본 연구를 통하여 지도학습의 장점을 확인할 수 있었으며, 향후 수변공간 분석 및 평가의 방법론으로 활용할 수 있다는 결과를 얻을 수 있었다. 추가 연구로 시간 단축을 위한 밴드 수 선택 및 토지피복지도의 활용을 통한 수변공간 구분 방식을 적용하고, 다른 지도학습 구분 방식도 적용하면 연구의 활용성을 증대하고 분류 기법을 정확히 평가할 수 있을 것으로 판단된다.
4. 결 론
본 연구에서는 하천 주변의 수변공간에서 다양한 관찰 및 탐색 대상(흙, 식생, 물, 콘크리트)의 분광 특성을 분석하고 이를 분류하고자 하였다. 강천보 하류 남한강에서 드론에 탑재된 초분광 센서 및 지상측정 분광기를 활용하여 수변공간을 측정한 후, 초분광 분석을 통하여 재료를 구분하였다. 각각 재료의 분광 특성을 비교 및 분석하고, 초분광 밴드의 형태대로 대상을 분류하였다. 분석 비교 결과, 수변공간 재료 구분의 경우 각 재료별로 고유한 유형의 파장대가 발생하는 것을 확인하였다. 이후 드론 탑재 초분광 센서 측정 자료와 지상 측정 분광기 측정 자료를 비교하여 초분광 센서로 측정한 원격 탐사 자료를 검증하였다. 다음으로 분류와 군집 분석 기법을 활용하여 각 수변공간 재료의 고유 분광 특성을 활용하여 초분광 이미지의 각 데이터를 K-means 기법과 SVM 기법으로 분류하였다. 분광기로 측정된 지역을 바탕으로 선택 지역에서 재료 구분을 진행한 후, 이를 라이브러리를 이용한 기초적인 분류, K-means 기법을 이용한 분류, SVM 기법을 이용한 분류 기법과 비교하였다.
분류 결과 SVM의 경우 기존 측정 분광 자료를 이용한 표본 지정 지도학습으로 K-means 기법에서 분류가 어려운 지역의 재료 구분까지 수행되었음을 확인할 수 있었다. 이 같은 본 연구의 결과는 향후 하천 수변공간 분석 및 평가의 초기 자료로 활용될 수 있을 것으로 기대되며, 추가적인 분류 기법의 적용이 이루어지면 더 정확한 수변공간 특성 분류가 가능할 것으로 판단된다.
