

1. 서 론
2. 연구방법
2.1 Mean Field Bias 보정기법
2.2 Generalized Linear Model Bias 보정기법
2.3 Bayesian Markov Chain Monte Carlo 기법
3. 분석자료
3.1 오성산 기상레이더 및 지상관측소 강수자료
4. 연구결과
4.1 편의보정 매개변수 산정 및 불확실성 평가결과
4.2 지형학적 특성을 고려한 편의보정 매개변수 변동성 분석
5. 결 론
1. 서 론
수문기상학 분야에서 가장 큰 비중을 차지하는 입력자료인 강수정보는 일반적으로 지상에 관측소를 통하여 획득하고 있다. 그러나 기상상태 및 운영관리의 제한성으로 인하여 지상관측소 공백 지역에서 국지적으로 발생하는 집중호우의 경우 효과적으로 관측이 어려운 상황이다(Choi and Lee, 2000; Bae et al., 2008). 특히, 우리나라는 지형학적 특성상 정확한 홍수예보를 위하여 해양에서 발달하여 유입되는 강수장 및 태풍의 강수분포를 사전에 명확하게 인지해야만 한다. 특히 산악지형이 많은 지역의 경우 지상관측소의 설치 및 유지관리가 불리하며 대부분 미계측 유역으로 관리되고 있다(Lee and Heo, 2011; Yoon and Bae, 2013).
가장 이상적인 강수관측 방안은 지상에 관측소를 최대한 조밀하게 설치하는 것이지만, 비용 및 유지관리의 한계점으로 효율적인 방안이라 할 수 없다. 따라서 지상관측소 설치의 한계점을 보완하고 고해상도의 시공간적 강수정보의 수요증가를 해결하고자 기상선진국에서는 레이더 기술을 응용한 강수관측이 시작되었으며 다양한 관련 연구가 활발하게 진행되고 있다(Seo et al., 1999; Adeyewa and Nakamura, 2003; Carpenter and Georgakakos, 2004; Chumchean et al., 2006; Dai et al., 2015). 레이더는 대기 중 강수현상의 입체적 특성 및 이동속도 등을 관측하여 강수현상의 다양한 정보를 제공한다. 특히, 우리나라는 지형학적으로 육지의 약 70% 이상이 산악지역이며 중위도에 위치하여 몬순기후의 영향을 받아 대부분의 강수현상은 서쪽에서 발달하여 동쪽으로 진행하는 빈도가 높아 해상에서의 강수발달 과정의 사전탐지가 필수적으로 요구된다.
수문기상학 분야에서 레이더 활용은 궁극적으로 집중호우 및 폭설 등의 위험기상 탐지와 초단기예보를 위한 시공간적으로 고해상도의 강수량 제공을 목적으로 운용되고 있다. 하지만 레이더를 이용한 강수현상의 관측과정에서 필연적으로 발생할 수 있는 불확실성 요인을 정량적으로 규명하는 것이 필요하며 이를 통해 레이더 강수량의 수문기상학적 활용가치를 확보할 수 있다(Delrieu et al., 2009; Kang et al., 2017). 레이더 강수량을 활용하는 단계에서 레이더 강수량의 편의보정(bias correction)을 포함한 정량적 추정단계를 QPE (quantitative precipitation estimation)라고 하며 본 연구에서는 QPE를 중심으로 연구를 진행하였다.
수문기상학 분야에서 레이더 강수량을 활용하고자 하는 경우 사용자의 편리성을 증대하기 위하여 레이더 강수량에 포함된 편의(bias)를 보정하는 절차는 레이더와 가장 근접한 지상관측소 강수량과의 비율(ratio)을 산정하여 레이더 강수량에 반영하는 편의보정 방법이 활용되고 있다(Smith and Krajewski, 1991; Krajewski and Smith, 2002; Villarini and Krajewski, 2010; Lee et al., 2015). 세부적으로는 결정론적(deterministic)으로 특정 비율을 반영하는 기법과 공간적 보간법에 따른 가중치를 반영하여 반영하는 기법으로 구분된다(Goovaerts, 2000; Sinclair and Pegram, 2005; Haberlandt, 2007; Kim et al., 2014; Kim et al., 2017). 또한, 레이더 강수량 편의보정 과정에서 발생하는 불확실성 요인은 다양하며 수문기상학 분야에서 레이더 강수량의 불확실성을 정량적으로 규명하고 평가하는 연구가 다양한 관점으로 진행되고 있다(Krajewski et al., 2010; Lee, 2018; Kim et al., 2018; Cecinati et al., 2018). 이러한 배경을 근간으로 본 연구의 목적은 불확실성 정량화 기법으로 활용되고 있는 Bayesian 기법을 적용하여 레이더 강수량 편의보정 매개변수의 불확실성을 정량적으로 평가하고 고도 및 이격거리와 같은 지형학적 특성과 레이더 강수량 편의보정 계수와의 연관성을 평가하고자 한다.
본 연구의 구성은 다음과 같다. 1장에서는 연구의 배경 및 목적에서 요약하였으며, 2장에서는 레이더 강수량 편의보정 매개변수 산정기법의 연구방법론을 서술하였다. 3장에서는 분석자료를 설명하였으며, 4장에서는 레이더 강수량 매개변수의 변동성 및 불확실성 분석결과에 대하여 정리하였다. 최종적으로 5장에서는 본 연구의 결론 및 활용방안에 관하여 서술하였다.
2. 연구방법
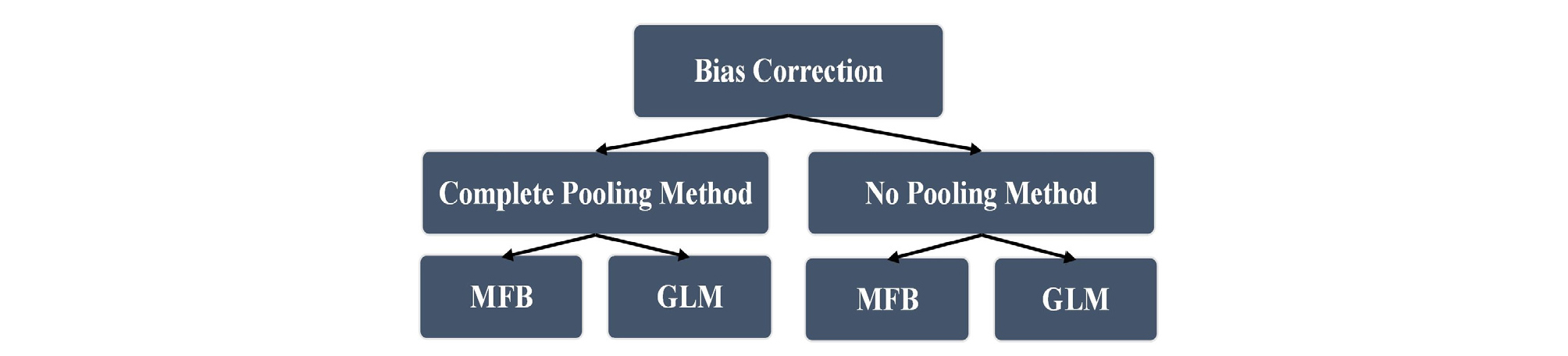
본 연구는 레이더 강수량 편의보정을 위하여 Mean Field Bias 보정기법과 Generalized Linear Model 기반의 Bias 보정기법을 활용하였으며, 자료통합기법의 적용 여부에 따라서 세부적인 연구절차는 Fig. 1과 같다.
2.1 Mean Field Bias 보정기법
기존 레이더 반사도-강수강도(reflectivity (Z) and rainfall intensity (R), 이하 Z-R) 관계식을 통하여 산출된 레이더 강수량은 정확도 확보에 제한이 있으며 수문모형에 입력자료로 곧바로 적용하는 데 한계가 있다. 레이더 강수량에 포함된 오차를 보정하기 위하여 다양한 수문기상학적 연구가 진행되고 있다. 그중에서도 적용방법이 비교적 간단하여 가장 널리 사용되고 있는 방법론은 Mean Field Bias(이하, MFB) 보정기법이다. 본 연구에서 활용한 MFB 보정기법은 Eq. (1)과 같으며 레이더 강수정보를 주제로 하는 다양한 연구에서 널리 사용되고 있으므로 간략하게 재정리하여 서술하였다(Yoo et al., 2011).
| $$G/R\;Ration\;=\;\sum_{t=1}^mR_t/\sum_{\mathrm t=1}^{\mathrm m}RE_t$$ | (1) |
여기서, G/R Ratio는 레이더 강수량과 지상강수량의 무게중심과 원점의 추세선의 기울기이다. 일반적으로 레이더 강수량은 과소 추정되는 경향이 있으므로 G/R Ratio는 1.0 이상의 값을 나타내며 일부 과대 추정되는 경우에는 1.0 이하의 값을 가지게 된다. R은 지상관측소 강수량(mm/hr)이며 RE는 Z-R 관계식으로 산정된 레이더 강수량(mm/hr)이다. RE는 레이더 반사도 인자 Z (mm6 /m3)와 레이더 강수강도 R (mm/hr)의 경험적인 관계식으로 Z =α․ Rβ로 표현하며, α와 β는 강수특성에 따라 경험적으로 결정되는 상수이다. 본 연구에서 언급하는 RE는 Marshall and Palmer (1948)에 의하여 제시된 층운형 강우형태 관계식 Z = 200 ․ R1.6(이하 M-P 관계식)으로 산정된 레이더 강수량을 의미한다.
2.2 Generalized Linear Model Bias 보정기법
레이더로부터 발사되어 대기수상체와 부딪혀 후방산란되는 반사도와 지상관측소의 지점강수량와의 관계를 멱함수 형태의 식을 Z-R 관계식이라 하며, 강수유형에 따른 다양한 Z-R 관계식이 제시되고 있다. 본 연구에서는 레이더 강수량 편의보정 매개변수를 산정하기 위하여 Z-R 관계식과 같은 멱함수 형태의 일반화 선형모형(generalized linear model, 이하 GLM)을 Eq. (2)와 같이 정의하였다. GLM 모형을 Z-R 관계식과 같이 멱함수 형태로 가정하는 사유는 일반적으로 레이더 반사도를 입력자료로 활용하여 Z-R 관계식을 사용하여 레이더 강수량을 산정과정으로 확장성을 고려하기 위함이다.
| $$Y_t=\alpha\cdot RE_t^\beta$$ | (2) |
여기서, Y는 지상관측소 강수량이며 RE는 기존 M-P 관계식으로부터 산정된 레이더 강수량이다. 결론적으로 레이더 강수량 편의보정 매개변수 α와 β을 추정함으로써 레이더 강수량에 포함된 편의를 보정을 할 수 있다. 레이더 강수량 편의보정 매개변수 산정의 효율성을 높이기 위하여 Eq. (2)에 로그변환(log transform)을 적용하였다(Kim et al., 2018). 즉, 레이더 강수량 편의보정 매개변수 α와 β는 선형회귀 식의 절편(intercept)과 기울기(slope)로 귀결된다.
| $$\log(Y_t)=\log(\alpha)+RE_t\cdot\beta$$ | (3) |
Eq. (3)은 Bayesian 기법의 연결함수(link function)로서 다변량 정규분포(multivariate normal distribution)의 평균(µ)을 의미하며 Eq. (3)를 재정리하면 Eq. (4)와 같다.
| $$Y_t\;\sim\;MVN(\alpha+\beta\cdot RE_t,{\textstyle\sum_\varepsilon})$$ | (4) |
여기서, Yt는 시간 t의 편의보정된 레이더 강수량, MVN은 다변량 정규분포를 의미한다. 다변량 정규분포의 공분산행렬()의 크기는 분석 지점의 수 S (S×S)로 결정된다.
세부적으로 본 연구에서는 레이더 강수량 편의보정 매개변수 산정과정은 유역단위 분석 및 지점단위 분석으로 구분하였다. 즉, 대상유역을 대표할 수 있는 레이더 강수량 편의보정 매개변수를 산정하기 위하여 강수자료를 통합(pooling, 이하 PM)하는 기법과 지점의 강수자료를 독립적(no pooling 이하 NPM)으로 고려하는 기법으로 구분하였으며, 각 기법의 레이더 강수량 편의보정 매개변수 산정은 MFB 기법과 GLM을 적용하였다. 각 모형의 연결함수는 Eqs. (5a)~(5d)와 같이 정리될 수 있다.
· Link Function of the PM Base Mean Field Bias Correction
| $$Y_{s,t}\;\sim\;MVN(\beta_{basin}\cdot RE_{s,t},{\textstyle\sum_\varepsilon})\;s=1,\dots,\;n$$ | (5a) |
· Link Function of the NPM Base Mean Field Bias Correction
| $$Y_{s,t}\;\sim\;MVN(\beta_s\cdot RE_{s,t},{\textstyle\sum_\varepsilon})\;s=1,\dots,\;n$$ | (5b) |
· Link Function of the PM base GLM Bias Correction
| $$Y_{s,t}\;\sim\;MVN(\alpha_{ba\mathit{sin}}+\beta_{basin}\cdot RE_{s,t},{\textstyle\sum_\varepsilon})\;s=1,\dots,\;n$$ | (5c) |
· Link Function of the NPM base GLM Bias Correction
| $$Y_{s,t}\;\sim\;MVN(\alpha_s+\beta_s\cdot RE_{s,t},{\textstyle\sum_\varepsilon})\;s=1,\dots,\;n$$ | (5d) |
Eqs. (5a)~(5d)에서 Yt는 시간 t의 편의보정된 레이더 강수량이며 RE는 기존 M-P 관계식으로부터 산정된 레이더 강수량을 의미한다. MVN은 다변량 정규분포를 의미한다. 다변량 정규분포의 공분산행렬()의 크기는 분석 지점의 수 S (S×S)로 결정된다.
2.3 Bayesian Markov Chain Monte Carlo 기법
수문통계학 분야에서 매개변수의 추정 및 매개변수의 불확실성 평가를 위하여 다양한 이론이 제시되고 있다. 이러한 매개변수의 추정 및 불확실성 분석으로 Bayesian 기법이 활용되고 있으며 다수의 연구를 통하여 우수성이 입증되었다(Todini, 2001; Kwon and Lall, 2016; Meira Neto et al., 2018; Bracken et al., 2018). Bayesian 기법은 사전정보를 근거로 사전분포(prior distribution)를 설정하고 무작위변수를 반복적으로 모의하는 과정으로 수행된다. 즉, 자료의 증가에 따라 추론정보가 연속적으로 증대하는 과정에서 사건의 발생가중치를 의미하는 우도(likelihood)를 활용하여 확률변수들의 조건부로 변동되는 사후분포(posterior distribution)를 추론하는 과정이다. 이를 수식으로 정리하면 Eq. (6)과 같다(Gelman, 2004).
| $$p(\theta\vert y)=\frac{p(\theta)p(y\vert\theta)}{p(y)}$$ | (6) |
Eq. (6)에서 는 매개변수, y는 관측자료이다. 즉, 는 사전분포, 는 가 주어졌을 때 y의 조건부 확률을 의미하는 우도, 는 y가 주어졌을 때 의 조건부 확률을 의미하는 사후분포이다.
Bayesian 추론과정에서 매개변수의 사전분포 선택은 매개변수의 특성파악으로 결정될 수 있지만 본 연구에서는 사전정보가 없는 경우 및 매개변수 추정을 위한 자료의 양이 충분하며 우도추정과정에서 사전분포에 크게 의존하지 않으면서 매개변수 추정이 가능하므로 무정보(non-informative) 사전분포를 사용하였다. 즉, 매개변수가 서로 독립이며 연속확률변수가 특정 구간에 대하여 동일한 확률을 가지며 분산 값이 매우 큰 균등분포(uniform distribution)형태의 무정보 사전분포를 만족한다고 가정하였다(Gelman, 2006; Gelman et al., 2015; Lima et al., 2016).
Bayesian 추론기법을 활용한 본 연구에서 레이더 강수량 편의보정 매개변수는 확률분포형으로 표현할 수 있다. 구체적으로는 Eqs. (7a)~(7b)과 같이 확률분포형으로 레이더 강수량 편의보정 매개변수의 사전분포를 가정하였으며 본 연구에서 제안하는 레이더 강수량 편의보정 매개변수 추정을 위한 사후분포는 Eqs. (8a)~(8d)로 정리할 수 있다.
· Prior distribution of Radar Bias Correction Factor
| $$\alpha_{s\;}\sim\;N(0,0.01)\;\;\;\;\;s=1,\dots,n$$ | (7a) |
| $$\beta_{s\;}\sim\;N(0,0.01)\;\;\;\;\;s=1,\dots,n$$ | (7b) |
· Posterior distribution of the PM Base Mean Field Bias Correction Factor
· Posterior distribution of the NPM Base Mean Field Bias Correction Factor
· Posterior distribution of the PM base GLM Bias Correction Factor
· Posterior distribution of the NPM base GLM Bias Correction Factor
Eqs. (8a)~(8d)에서 Inv-Wishart은 다변량 정규분포 조건에서 표본의 분산-공분산 행렬을 위한 확률분포로 본 연구에서는 레이더 편의보정 매개변수 추정의 수학적 편리성을 위하여 MVN 공분산행렬의 자유도()와 규모행렬()로 정의되는 Inverse Wishart 분포를 사용하였다.
본 연구에서 다변량 조건이며 직접 표본생성이 불가능한 상태에서 원하는 분포에 수렴하는 표본을 생성하는데 사용되는 Markov Chain Monte Carlo (MCMC) 기법의 Gibbs 표본법을 활용하여 매개변수를 추정하였다. MCMC 기법은 복잡한 다변량 확률분포 및 매개변수의 추정을 요구하는 상황에서 일반적으로 사용되며 Bayesian 추론기법에서 사후분포의 추론에 널리 활용되고 있다. 구체적으로 본 연구에서는 표본이 효과적으로 혼합되어 추출되도록 3개의 병렬체인을 이용하여 추적곡선을 사용하여 매개변수의 안정적인 수렴을 확인하였고 10,000개의 표본을 반복생성한 후, 초기 난수의 영향을 최소화하기 위하여 초기의 5,000개의 난수를 제거하였다.
본 연구에서 다변량 조건이며 직접 표본생성이 불가능한 상태에서 원하는 분포에 수렴하는 표본을 생성하는데 사용되는 Markov Chain Monte Carlo (MCMC) 기법의 Gibbs 표본법을 활용하여 매개변수를 추정하였다. MCMC 기법은 복잡한 다변량 확률분포 및 매개변수의 추정을 요구하는 상황에서 일반적으로 사용되며 Bayesian 추론기법에서 사후분포의 추론에 널리 활용되고 있다. 구체적으로 본 연구에서는 표본이 효과적으로 혼합되어 추출되도록 3개의 병렬체인을 이용하여 추적곡선을 사용하여 매개변수의 안정적인 수렴을 확인하였고 10,000개의 표본을 반복생성한 후, 초기 난수의 영향을 최소화하기 위하여 초기의 5,000개의 난수를 제거하였다.
3. 분석자료
3.1 오성산 기상레이더 및 지상관측소 강수자료
전라북도 군산시 오성산에 설치되어 운영 중인 오성산 기상레이더는 우리나라 서부지역과 남해상의 기상현상을 조기에 탐지하기 위하여 1992년 C-band 기상레이더를 도입하였다. 설치 후 기상관측을 시작하여 노후 레이더 교체보강 사업계획에 의하여 2007년에 S-band 기상레이더로 교체되어 운영되었으며 2018년 5월부터 S-band 이중편파 레이더로 교체를 진행하여 현재는 교체를 완료하였다. 본 연구에서는 오성산 기상레이더가 안정적으로 운용되어 양질의 자료 확보가 가능한 2008년부터 2017년의 기상레이더 자료를 활용하였다.
일반적으로 수문기상학 분야에서 레이더 강수량을 평가하기 위하여 특정 강수사상이나 태풍사상을 선정하여 분석하는 경우가 대부분이다. 수문기상학적으로 레이더 강수량을 활용하는 데 있어 강우-유출 모형을 통한 지상강수량과의 유출해석에 초점을 맞추어 특정 강수사상으로 사례검증을 수행하는 연구를 진행되고 있다. 이러한 사유는 전자파 신호의 레이더 자료처리 과정이 간단하지 않아 장기간의 레이더 강수자료를 축적하는 데 어려움이 있다. 특히, 우리나라의 초창기 기상레이더 관측은 장비의 설치와 안정화에 주안점을 두고 진행되어 품질관리가 수행된 장기간의 레이더 자료를 활용하는 데 한계가 있었다. 하지만 본 연구에서는 중장기적으로 레이더 강수량을 평가하고 레이더 강수량의 신뢰도를 확보하고자 장기간의 레이더 강수량을 범정부 레이더 자료제공 시스템(download.kma.go.kr)에서 취득하여 활용하였다.
본 연구에서는 관측된 레이더 자료에 포함된 비강수에코 제거를 위하여 ORPG 품질관리 과정을 적용하여 특정 고도에서 레이더 자료를 수평으로 표출하는 CAPPI (constant altitude plan position indicator) 자료를 활용하였다. 상세하게는 고도 1.5km 10분 단위 CAPPI 자료를 활용하여 1시간 단위 레이더 강수량 자료를 구축하였다. Tables 1 and 2 및 Fig. 2는 오성산 기상레이더 제원 및 주변 관측소의 정보를 정리한 것이다. 오성산 기상레이더는 WSR -88D 레이더로서 1988년부터 미국에서 움직이는 목표물에 전파가 부딪히면 반사파의 주파수가 목표물의 속도에 따라 변동하는 도플러 효과를 응용하여 기상감시용으로 활용하는 레이더의 일종이다.
Table 1. Specification of the Oseongsan radar
Table 2. Weather stations used in this study and their geomorphological informations
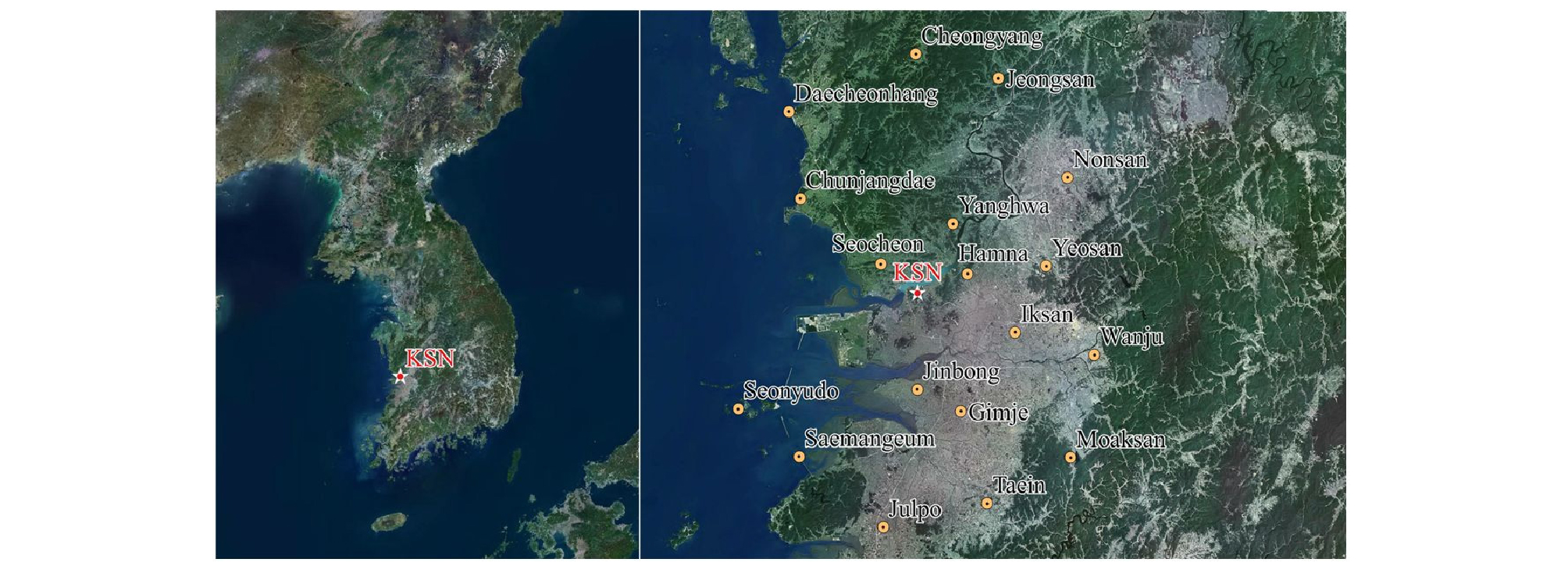
오성산 기상레이더를 중심으로 반경 50 km 이내의 기상청 자동기상관측장비(automatic weather station, AWS) 및 종관기상관측장비(automated surface observing system, ASOS)는 총 25개 지점으로 ASOS 5개 지점 및 AWS 20개 지점이다. 이 중에서 군산산단(No. 886) 및 군산레이더(No. 144)의 관측소의 유지관리로 인한 관측자료의 손실기간이 발생하여 해당 관측소를 사용하는 경우 레이더 강수량 편의보정 매개변수를 추정하는 과정에서 불확실한 자료를 제공할 가능성이 고려되어 분석에서 제외하였다. 추가로 지상관측소 강수관측 과정의 통일성을 고려하여 본 연구에서는 AWS 지점의 강수자료를 대상으로 레이더 강수량 편의보정 매개변수 추정을 수행하였다.
4. 연구결과
4.1 편의보정 매개변수 산정 및 불확실성 평가결과
강수량을 직접 계측하지 않고 전파신호를 가공하여 강수량으로 환산하는 레이더 강수량의 불확실성을 정량화하는 것은 현재까지도 많은 어려움이 따른다. 예를 들어, 품질관리 과정에서 발생할 수 있는 불확실성과 레이더 강수량 추정과정에서 발생할 수 있는 불확실성 및 레이더 강수량 보정과정에서 발생할 수 있는 불확실성 등이 있다.
Z-R 관계식을 활용하는 레이더 강수량 추정과정은 층운형 및 대류형에 적합한 Z-R 관계식을 일괄적으로 적용하여 레이더 강수량을 산정하게 된다. 이러한 과정은 레이더 강수량에 상당한 오차와 불확실성을 유발하게 되어 부정확한 해석 결과를 도출하는 문제점이 있다. 본 연구에서는 레이더 강수량의 신뢰도를 높이고자 레이더 강수량 편의보정 과정의 불확실성을 정량적으로 평가하는 데 초점을 맞추어 결과를 제시하였다.
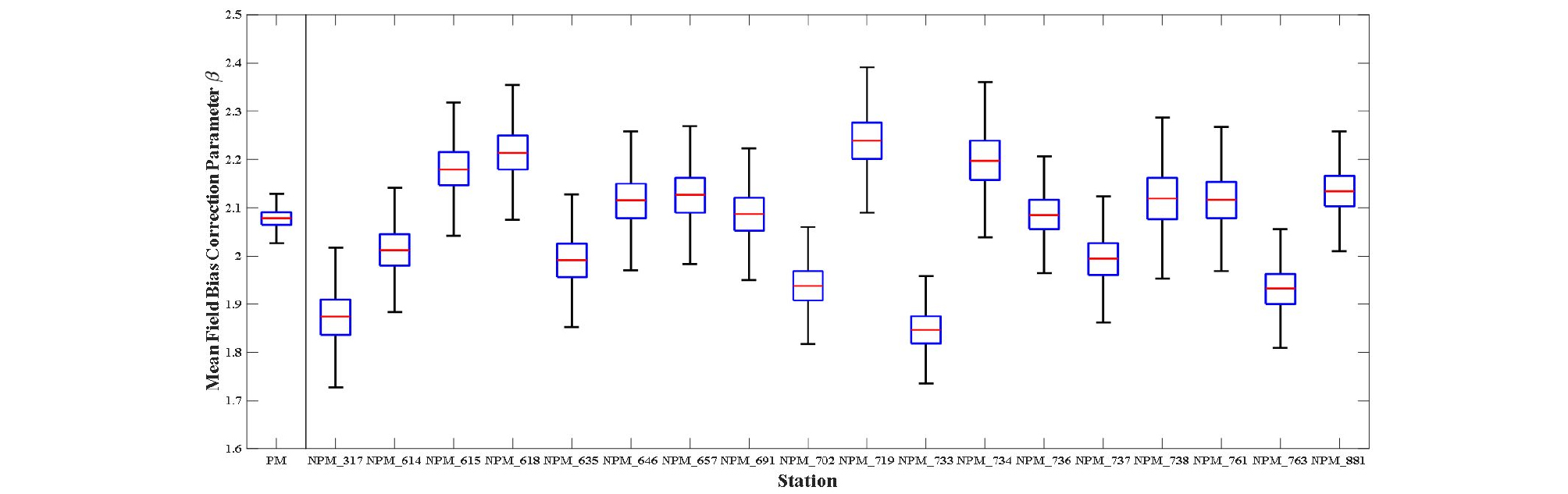
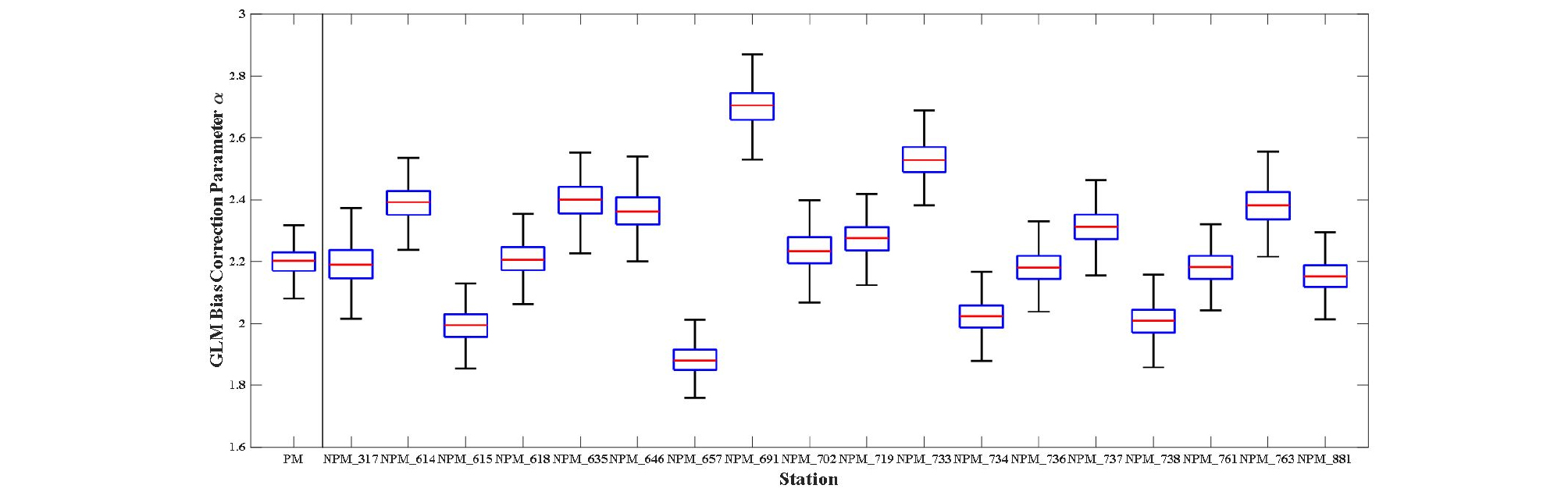
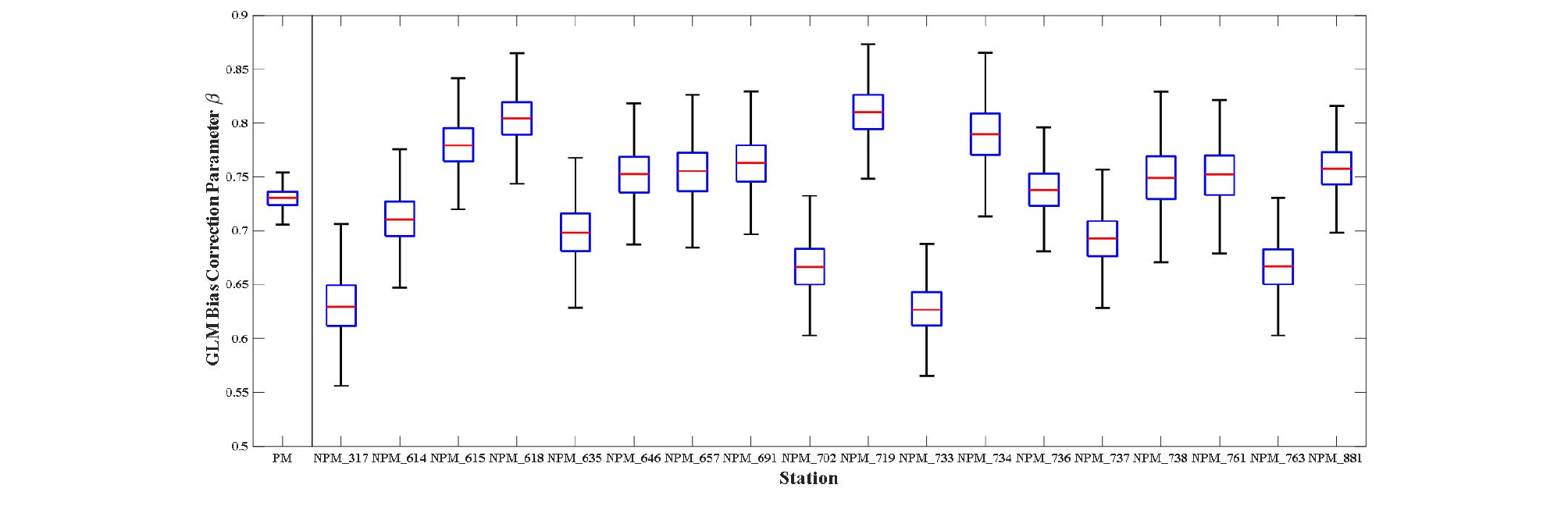
Figs. 3, 4 and 5는 Bayesian MCMC 기법을 기반으로 추론된 레이더 강수량 편의보정 매개변수 사후분포의 사분위수 범위(interquartile range)를 도시한 결과로 ‘PM’는 PM 기법으로 산정된 편의보정 매개변수를 의미하며 ‘NPM_No.’은 해당 지상관측소를 의미한다. 세부적으로는 Fig. 3은 MFB 기법을 PM 기법과 NPM 기법으로 적용하여 산정된 편의보정 매개변수의 사후분포를 도시한 결과로 PM 기법으로 산정된 편의보정 매개변수 β의 중앙값은 약 2.08로 18개 지점의 편의보정 매개변수의 사후분포 구간에 있는 것을 확인할 수 있다. Figs. 4 and 5은 Bayesian MCMC 기법을 기반으로 구축된 GLM 편의보정기법을 PM 기법과 NPM 기법으로 적용하여 산정된 편의보정 매개변수의 사후분포를 도시한 결과이다. PM 기법으로 산정된 편의보정 매개변수 α의 중앙값은 약 2.19이며 편의보정 매개변수 β의 중앙값은 약 0.73이다. MFB 기법과 유사하게 PM 기법으로 산정된 편의보정 매개변수는 18개 지점의 편의보정 매개변수의 사후분포 구간에 있는 것을 확인할 수 있다.
수문기상학 분야에서 모형의 적합성 여부 및 성능을 확인하기 위하여 통계적 효율 기준(efficiency criteria)을 사용하고 있다. 앞서 서술한 레이더 강수량 편의보정 방법론의 적합성 여부를 평가하기 위하여 기초통계분석을 수행하였다. 본 연구에서 사용한 통계지표는 상관계수(Correlation coefficient, CC), 일치계수(Index of Agreement, IoA), 평균제곱근오차(Root Mean Square Error, RMSE), 평균절대오차(Mean Absolute Error, MAE) 및 편의 등 5가지이다. 상관계수 및 일치계수는 무차원 지표로서 최적값은 1이며, 평균제곱근오차, 평균절대오차 및 편의의 단위는 mm / hr이며 최적값은 0이다.
Bayesian MCMC 기법으로 산정된 매개변수의 평균값을 활용하여 통계지표를 산정하였다. Table 3에서 확인할 수 있듯이 M-P 관계식으로 산정된 레이더 강수량과 지상강수량의 유역평균 통계지표는 상관계수 0.728 및 일치계수 0.586으로 레이더 강수량과 지상강수량의 상관특성이 비교적 높은 것을 확인할 수 있다. 하지만 MAE, RMSE 및 Bias 등과 같은 변량 간의 양적 특성을 평가하는 통계분석 결과는 M-P 관계식으로 산정된 레이더 강수량의 지상강수량 복원성에서 정량적 오차가 상당한 부분 포함되어 있음을 확인할 수 있다.
Table 3. Evaluation of model efficiency criteria
Table 3. Evaluation of model efficiency criteria (Continue)
유역에서 강수현상이 발생하는 경우 다양한 강수특성이 존재하고 있으므로 MFB 기법을 적용하여 평균적 특성으로 보정된 레이더 강수량을 활용하는 경우 부정확한 강수정보 생산으로 수문해석에 오차를 유발할 수 있다. 특히, 국지적 특성을 가지는 강수현상의 경우 이러한 오차는 증대될 수 있다. 현재 레이더 강수량 편의보정 과정에서 널리 사용되고 있는 MFB 기법으로 산정된 통계지표에 비하여 GLM 기법을 활용한 편의보정 레이더 강수량의 통계지표 우수성을 확인하였다. 기존에 단일 값으로 유역에 동일한 편의보정 매개변수를 적용하는 PM 기법의 매개변수 산정결과와 비교하여 Bayesian MCMC 기법으로 산정된 각 지점 매개변수의 불확실성 구간에 PM 기법의 매개변수가 포함되는 것을 확인하였다. NPM 기법으로 산정된 지점별 편의보정 매개변수를 적용하여 레이더 강수량 편의보정을 수행한다면 현실적인 강수량 복원성을 제시할 것으로 사료된다.
PM 기법으로 산정된 편의보정 매개변수의 불확실성 구간이 상대적으로 작은 것을 확인할 수 있으며 NPM 기법보다 상대적으로 분석자료의 수가 많은 이유로 사료된다. 정리하면, 편의보정 매개변수의 불확실성을 평가한 결과는 실질적으로 유역에 평균적 특성을 가지는 보정계수를 일괄적으로 적용하여 편의를 보정하는 PM 기법은 레이더 강수량의 정량적인 재현능력에 현실성이 부족할 것으로 판단된다.
4.2 지형학적 특성을 고려한 편의보정 매개변수 변동성 분석
본 연구에서는 편의보정 매개변수의 지형학적 특성을 고려하기 위하여 MFB 기법과 GLM 기법으로 산정된 편의보정 매개변수를 대상으로 지상관측소의 고도와 레이더 지점으로부터의 이격거리에 따른 변동성 분석을 수행하였다. Fig. 6은 고도에 따른 편의보정 매개변수의 변동성 분석결과이다. 오성산 레이더 반경 50 km에 있는 지상관측소의 고도에 따른 매개변수는 대략적으로 3개의 군집으로 분류될 수 있는 것을 확인하였다. 추가로 레이더 강수량 편의보정 매개변수 β는 고도가 증가함에 따라 감소하는 추세를 확인하였다.
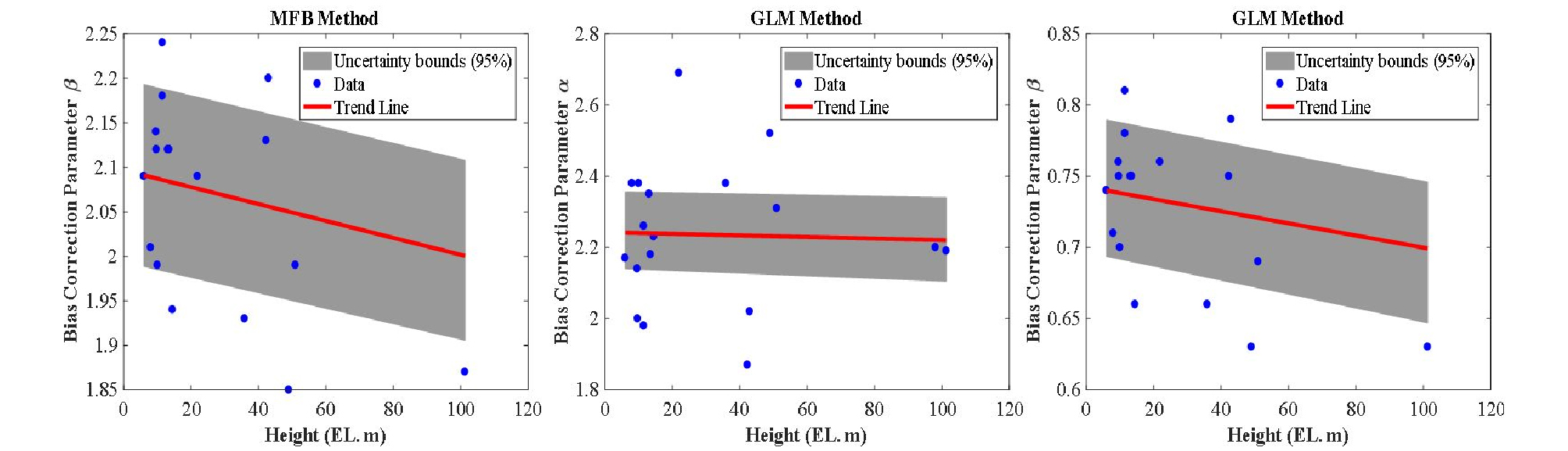
Fig. 7은 이격거리에 따른 편의보정 매개변수의 변동성을 분석한 결과이다. 이격거리가 증가할수록 군집되어 있는 편의보정 매개변수가 증가하는 것을 확인할 수 있다. 고도에 따른 분석결과와는 상반되게 이격거리에 따른 편의보정 매개변수 α는 감소하는 추세이며 편의보정 매개변수 β는 증가하는 추세를 확인하였다.
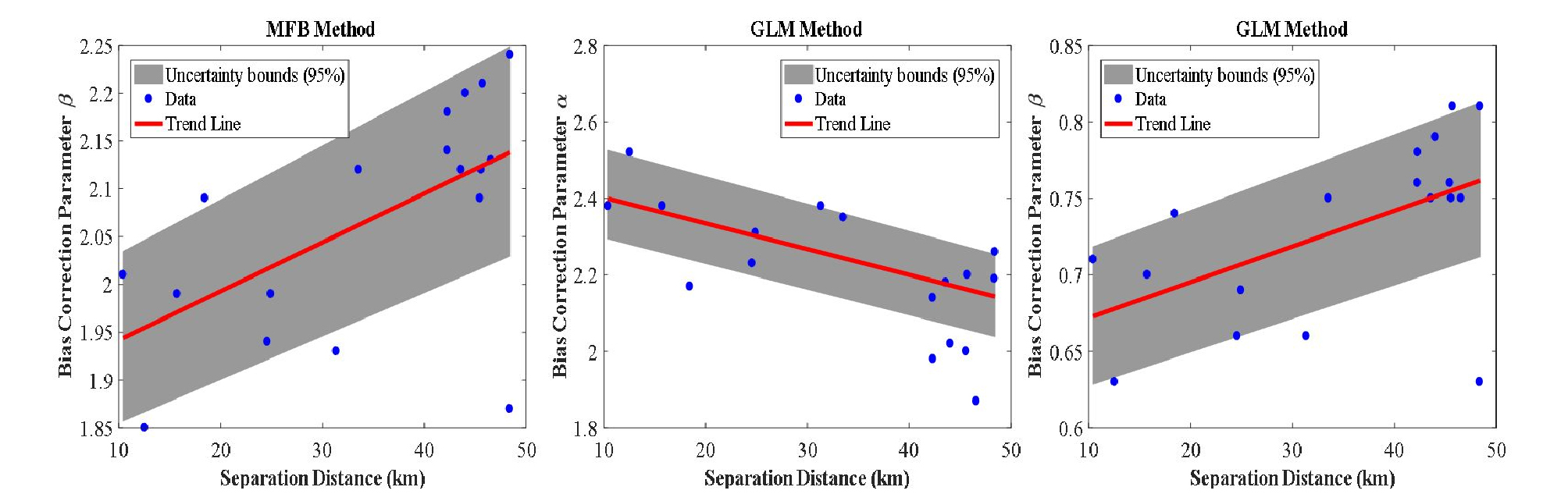
세부적으로 편의보정 매개변수 α는 지상강수량과 레이더 강수량의 평균 오차(mean bias)로 고려될 수 있으며 레이더와 이격거리가 증가할수록 레이더 강수량의 평균 오차가 감소하지만 고도의 영향력은 미비한 것으로 사료된다. 정리하면, 레이더 강수량의 평균 오차는 지상관측소의 고도에 비하여 이격거리에 대한 종속성이 강한 것으로 판단된다. 이와 같은 사유는 레이더로부터 발사된 전자파가 강수입자에 부딪혀 후방산란 되어 돌아오는 과정에서 이격거리가 증가할수록 레이더 반사도 자료의 감쇠, 바람효과 및 빔 교란 등의 영향력의 원인으로 사료된다.
두 개 이상의 독립변수와 하나의 종속변수를 추정하는 다중 회귀분석을 활용하여 편의보정 매개변수의 지역화 분석을 수행하였다. 세부적으로 연구결과를 바탕으로 고도와 이격거리를 독립변수로 설정하고 레이더 강수량 편의보정 매개변수를 종속변수로 설정하여 다중 회귀분석을 수행하였다.
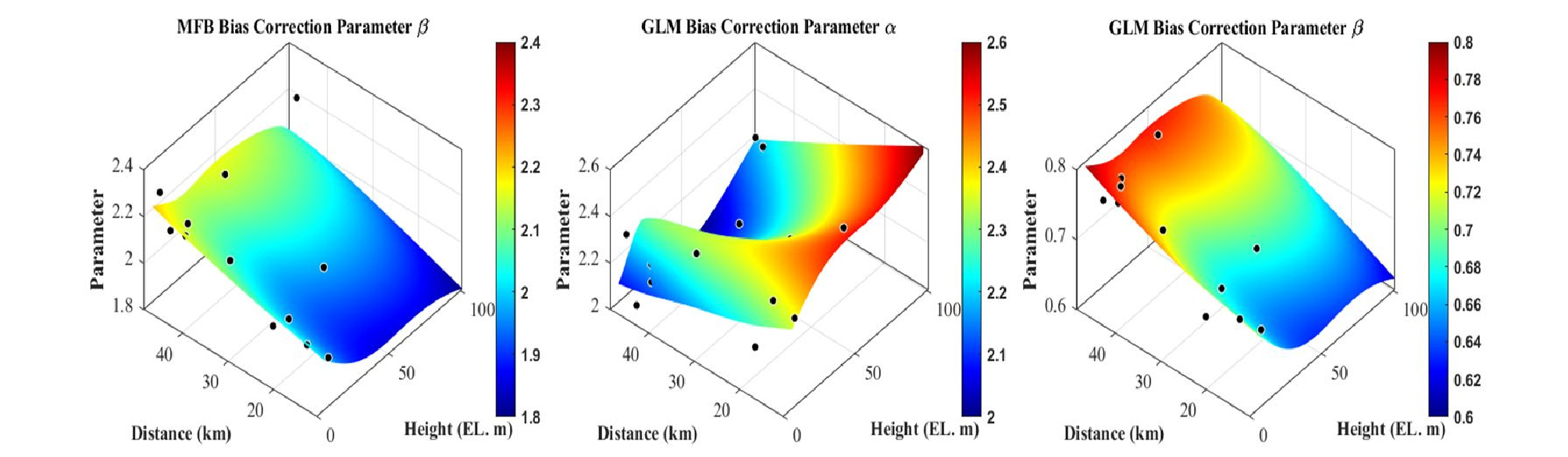
Fig. 8은 Table 4의 다중회귀 분석으로 산정한 지역화 레이더 강수량 편의보정 매개변수의 지역화 결과이다. MFB 기법과 GLM 기법의 레이더 강수량 편의보정 매개변수 β는 유사한 특성을 나타내고 있음을 확인할 수 있으며 GLM 기법의 레이더 강수량 편의보정 매개변수 α는 β와 상반되는 특성을 확인하였다. 통계학적으로 Bayesian MCMC 기법 산정결과와 MFB 기법 레이더 강수량 편의보정 매개변수 β의 지역화 결과의 상관성은 0.71이며 GLM 기법 레이더 강수량 편의보정 매개변수의 지역화 결과의 상관성은 각각 0.46 및 0.67로 산정되었다.
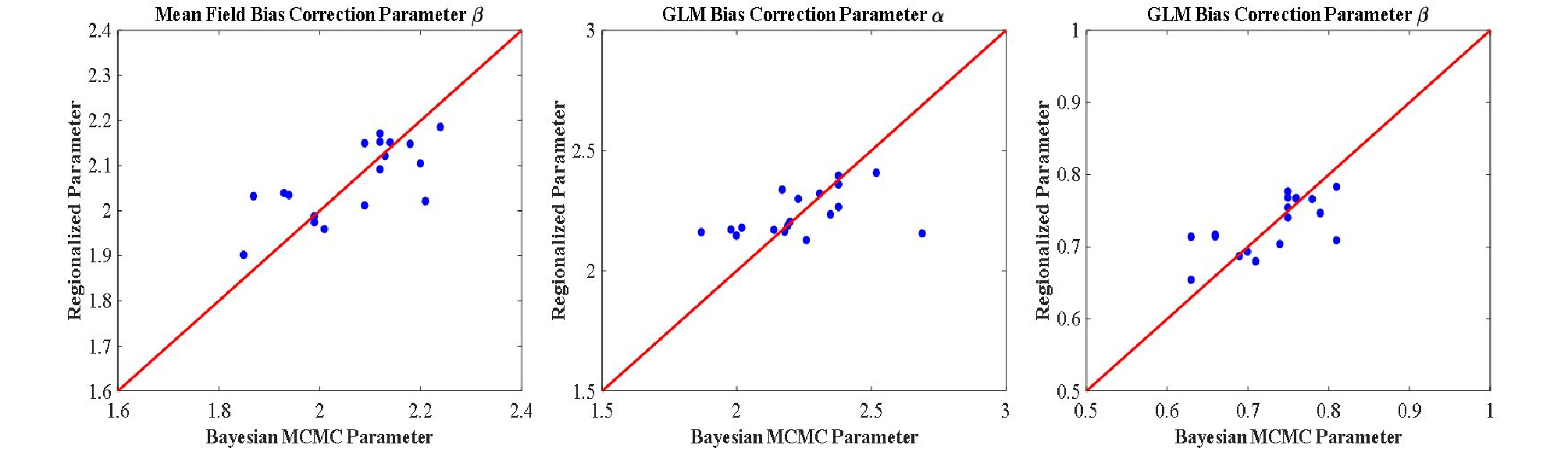
Table 4. Regression equation of the bias correction parameters using geomorphological characteristics
Fig. 9는 지형학적 특성을 고려한 레이더 강수량 편의보정 매개변수의 공간분포 결과이다. 이 결과는 향후 첨단기상관측장비에 의존성이 증가하여 기상레이더 위치를 기준으로 지상관측소의 추가설치과정에서 설치위치 결정 및 레이더 강수량 생산의 참고자료로 활용이 가능한 것으로 사료된다.
5. 결 론
최근 기후 변동성으로 유발되는 불안정한 기상상태를 효율적으로 관측하고 기상이변으로 인해 발생하는 국지성 호우와 그로 인한 풍수해 피해를 저감하고자 다양한 분야에서 레이더가 도입되고 있다. 레이더로부터 도출된 강수정보는 강수유무 및 대상유역에 대한 공간적 강수분포를 제공함으로써 지상관측소에서 측정된 점 강우량에 비하여 강수의 시공간적 분석 효율성이 우수하다. 우리나라의 강수는 대부분 해양에서 발달하여 육지로 유입되며 산악지형의 존재로 인하여 레이더를 이용한 강수시스템의 감시와 정량적 강수량 추정 방법의 개발이 필수적으로 요구된다. 실제적으로 접근이 용이한 지역에 있는 지상관측소의 정보만을 이용하는 경우 해양 및 산악지형에서 급속도로 변화하는 강수정보를 획득하는 데 한계가 있다. 따라서 시공간적인 강수의 변동성 관측이 가능한 레이더의 활용은 수문기상학적 연구에 필수적이다. 하지만 레이더 원시자료는 전기적 신호인 반사파를 수문기상학적으로 사용하기 위해서는 경험적인 공식을 이용하여 강우강도로 변환해야 한다. 레이더 강수량은 Z-R 관계식으로 산정되므로 레이더 강수량은 필연적으로 실제 지상에 도달하는 강수량과는 정량적으로 오차가 발생하여 직접적으로 수문기상학적 해석의 활용도는 낮아 지상강수량과 보정작업이 필수적으로 선행되어야 한다.
현재 외국에서 개발된 Z-R 관계식을 사용하여 결정적인 값으로 제공되는 레이더 강수량은 추정과정에 다양한 불확실성이 내포되어 있다. 따라서 본 연구는 시공간적으로 고해상도의 강수정보를 제공하고는 레이더 강수량의 정확도 향상을 위하여 레이더 강수량 편의보정 기법을 개발하고 지형학적 특성을 고려하여 편의보정 매개변수의 변동성을 평가하였다. 세부적으로는 MFB 기법과 GLM 기법을 적용하여 레이더 강수량 편의보정 매개변수를 산정하였으며 Bayesian MCMC 기법을 활용하여 레이더 강수량 편의보정 매개변수의 불확실성을 정량적으로 검토하였다. 본 연구를 통해 얻은 결론은 다음과 같이 요약할 수 있으며 이를 기반으로 수문기상학적 측면에서 고품질의 레이더 강수량의 활용이 가능할 것으로 사료된다.
첫째, 관측영역에 고정된 Z-R 관계식을 적용할 경우 강수유형의 특성이 고려되지 않아 정확한 레이더 강수량을 추정하는 데 어려움이 있다. 본 연구에서 제안하는 레이더 강수량 편의보정 기법과 GIS를 활용한 보간법을 연계하여 산지 등과 같은 지상 관측소 공백지역의 레이더 강수량의 생산이 가능하므로 지상우량 관측시스템의 한계를 보완할 수 있다. 즉, 집중호우 감시 및 수치예보 자료의 초기조건으로 활용될 수 있으며 추가적으로 기상관측 인프라 확충계획 및 수문예측 및 돌발홍수 모니터링 지원 등 다양한 분야에 활용이 가능할 것으로 판단된다.
둘째, 본 연구에서는 Bayesian MCMC 기법을 도입하여 레이더 강수량 편의보정 매개변수의 사후분포를 도출하였다. 즉, 사후분포를 활용하여 레이더 강수량을 앙상블 형태로 생산이 가능하다. 수문기상학적으로 앙상블의 사용은 다양한 모멘트를 활용할 수 있는 장점이 있다. 즉, 레이더 강수량 편의보정을 수행하는 과정에서 본 연구에서 제시하는 연구기법을 적용하여 유역단위 및 지점단위 분석의 목적에 맞추어 레이더 강수량의 불확실성을 정량적으로 고려한다면 신뢰성을 확보한 수문기상학적 분석이 가능할 것으로 판단된다.
셋째, 최근 빈번히 발생하는 돌발홍수에 효과적으로 대응하기 위해서는 시공간적으로 고분해능 관측이 가능한 레이더 지점을 기준으로 기상관측전략을 체계적으로 수립할 필요가 있다. 관측반경이 긴 대형레이더의 경우 저고도 관측영역에서의 음영지역이 발생하여 자료의 불확실성이 증가하는 것을 보완하고자 최근에는 상대적으로 짧은 관측반경을 갖는 소형레이더 및 이동식 레이더를 활용하여 국소지역의 기상현상을 감시하고 있다. 본 연구결과를 활용하여 소형레이더의 신설 및 이동식 레이더 운영에 따른 레이더 강수량 추정에 활용한다면 레이더 강수량의 불확실성을 규명하고 정확도가 확보된 레이더 강수량을 제시하여 수문해석의 정확도 향상에 기여할 것으로 판단된다.
