

1. 서 론
2. 연구 방법
2.1 cGAN 기반 강우 예측 모델
2.2 WRF
2.3 자료 구축
2.4 성능 평가 지표
3. 모델 구축 및 결과 분석
3.1 유역 특성 및 레이더 입력자료의 시간해상도에 따른 cGAN 기반 모델 성능평가
3.2 WRF 모델 vs. cGAN 기반 모델 성능 평가
3.3 모델 별 강우 예측 성능의 정성적 평가
4. 결 론
1. 서 론
산사태, 돌발 홍수 등 시공간적 규모가 작은 기상이변의 빈도와 강도가 증가함에 따라 이러한 물 관련 재해 대응을 위해 강우 예보의 정확도를 개선해야 한다는 요구가 지속적으로 제기되고 있다(WMO, 2017). 일반적으로 여섯 시간 이내 단기 강우 예측에는 물리과정 기반 수치예모모델(Numerical Prediction Models, NWPs)과 강우 레이더 자료 기반 확률론적 외삽법이 사용되었다. 이중, 레이더 자료 기반 모델의 경우, 최근 인공지능(AI) 기술의 발전에 따라, 다양한 머신러닝 기법을 사용하여 단기 강우 예측에 뛰어난 성능을 보이는 것을 입증하고 있다(Shi et al., 2015; Agrawal et al., 2019; Ayzel et al., 2020; Trebing et al., 2021).
Shi et al. (2015)는 순환신경망(Recurrent Neural Network, RNN) 기법 중 하나인 LSTM (Long Short-Term Memory) 내부 연산 과정에 convolution을 적용하여 입력자료의 시공간적 적보를 학습할 수 있는 ConvLSTM (Convolutional LSTM)을 제안하여 그 성능을 입증하였다. 또한, LSTM과 같은 시간 정보를 학습하는 요소가 없음에도, 합성곱 신경망(Convolutional Neural Network, CNN) 기반 기법인 U-net 기반 강우예측 모델 역시 단기 강우 예측에 우수한 성능을 보이는 것을 여러 연구를 통해 확인할 수 있다(Agrawal et al., 2019; Ayzel et al., 2020; Trebing et al., 2021).
최근에는 이미지 생성 분야에서 뛰어난 성능을 보인 생성적 적대 신경망(Generative Adversarial Network, GAN) (Goodfellow et al., 2014)를 활용하여 두 시간 이내 강우 예측을 개선하는 연구가 수행되었다(Choi and Kim, 2022; Ravuri et al., 2021). Choi and Kim (2022)은 국내 소양강댐 유역에 대해 조건부 생성적 적대 신경망(conditional GAN, cGAN)을 기반으로 개발된 모델이 ConvLSTM 및 U-net 기반 모델과 비교하여 최대 90분까지 개선된 예측 강우를 생성할 수 있음을 보였다. 이와 같이 여러 연구에서 딥러닝을 활용하여 기존 레이더 자료 기반 확률론적 외삽 모델의 성능을 개선하였으나, 모델의 과소추정 경향과 예측 선행시간 증가에 따른 성능 저하는 딥러닝 기반 모델의 주요 한계점으로 지적되어왔다(Wang et al., 2016). 특히, 5분 또는 10분의 시간 해상도를 가지는 레이더 자료를 기반으로 개발되는 모델의 특성상, 두 시간 이상 선행시간에 대해 예측을 수행하는 딥러닝 기반 모델 개발 연구는 미흡한 실정이나, 홍수 조기경보 시스템 등에 예측 강우를 활용하기 위해서는 최소 세 시간에서 여섯 시간까지의 예측 강우를 생산하는 모델 개발이 필수적이다.
본 연구에서는 영산강 유역을 대상으로 최대 여섯 시간까지 예측 강우를 생산하는 머신러닝 기반 모델을 개발하여 그 성능을 평가하고자 하였다. 이를 위해 현실적인 이미지 생성에 우수한 성능을 보이는 cGAN을 활용하여 딥러닝 모델을 개발하였다. 입력자료의 시간해상도에 따른 성능 평가를 통해 최적 모델을 구축하고, 유역특성정보를 추가적인 입력자료로 구성하여 모델 성능을 개선하고자 하였다. 개발된 cGAN 기반 여섯 시간 강우 예측 결과는 기존 고해상도 기상 예보 생산에 사용되는 물리과정기반 대기모형인 Advanced Research Weather Research and Forecasting (WRF-ARW)와의 비교를 통해 선행시간 증가에 따른 예측 성능을 검토하였다.
2. 연구 방법
2.1 cGAN 기반 강우 예측 모델
본 연구에서는 머신러닝 기반 강우 예측 모델을 개발하기 위해 생성적 적대 신경망(GAN)을 기반으로 모델을 개발하였다(Fig. 1). GAN은 최근에 데이터 생성기와 판별기를 활용하여 데이터를 생성하는 구조로 주목받고 있다. 이 네트워크는 무작위 노이즈를 입력으로 받아 실제 데이터 분포를 생성하는 생성기(G)와, 생성된 데이터가 진짜인지 가짜인지를 판별하는 판별기(D)로 구성된다(Goodfellow et al., 2014). GAN의 확장형인 조건부 생성적 적대 신경망(cGAN)은 훈련 과정에서 추가적인 조건(e.g., 생성기의 입력 자료)을 포함하여 특정 조건에 적합한 결과물을 생성할 수 있는 능력을 갖추고 있어, 이미지 생성 분야에서 뛰어난 성능을 보여주고 있다(Mirza and Osindero, 2014).

cGAN은 생성기(G)와 판별기(D)로 구성되며, 무작위 노이즈(z)와 입력(x)으로부터 이미지(y)를 생성하는 생성기(G)를 훈련 시키는 것이 목적이다. 이때, 판별기(D)는 생성기(G)로부터 생성된 이미지를 실제 이미지와 구별하여, 손실 함수 을 최대화하는 방향으로 훈련되며, 반면에 생성기(G)는 판별기(D)가 구별할 수 없도록 을 최소화하는 적대적인 프로세스로 훈련이 수행된다(Eq. (1)).
Isola et al. (2017)은 이러한 cGAN 기본 학습 과정을 U-net에 적용한 Pix2Pix 모델을 제안하였으며, 특히, 픽셀단위 loss (Eq. (2))를 가중치 𝜆를 통해 에 결합(Eq. (3))하여 Pix2Pix 모델이 기존 U-Net 모델에 비해 더욱 향상된 품질의 이미지를 생성할 수 있음을 입증하였다.
최근에는 기상 예측 분야에서도 cGAN 기반 모델의 우수한 성과를 확인할 수 있다(Rüttgers et al., 2019; Ravuri et al., 2021; Choi and Kim, 2022). Rüttgers et al. (2019)은 위성 영상을 이용해 한반도 과거 태풍 궤적과 구름 패턴을 정확히 예측할 수 있음을 보였고, Ravuri et al. (2021)은 video GAN 모델(Clark et al., 2019)을 기반으로 한 강수 예측 모델을 개발하여 강우 예측 성능을 크게 향상시켜, 실제 기상 예보 관련 현업에 종사하는 실무진들에게도 긍정적인 피드백을 받은 점을 강조한 바가 있다. Choi and Kim (2022)은 cGAN의 기본 구조인 Pix2Pix 모델을 바탕으로 국내 소양강댐 유역의 강우 예측 모델을 설계하였으며, 이 모델이 U-net 및 ConvLSTM 모델에 비해 최대 90분까지 강우 예측의 정확성을 크게 향상시킬 수 있음을 보여주었다.
본 연구에서는 선행연구(Choi and Kim, 2022)에서 제안된 cGAN 기반 모델의 기본 구조를 참고하여 모델을 구축하였으며, 과거 40분 동안의 10분 간격 레이더 자료(t-30 ~ t 분)를 입력으로 하여 미래 10분 강우 예측을 수행한 선행연구와 달리 미래 1시간의 예측 강우를 생성하기 위해 입력 자료로 과거 6시간의 레이더 자료를 사용하였다. 또한, 본 연구에서 cGAN 기반 강우예측모델 개발 시 레이더 입력자료의 시간 해상도(10분, 1시간)에 따른 영향을 분석하기 위해 이에 따른 모델을 다르게 구성하였다. 각각 10분, 1시간의 시간해상도를 가지는 과거 6시간 동안의 레이더 자료(t-5 ~ t 시간)을 입력으로 하여 미래 1시간까지의 예측(t-4 ~ t+1 시간)을 수행하는 모델을 설정하였다. 이때, 10분 시간해상도를 가지는 cGAN 모델(cGAN_min (only radar))의 경우 총 31개의 time step을 가지는 입력 및 출력 시퀀스를 가지며, 1시간 시간해상도를 가지는 cGAN 모델(cGAN_hr (only radar))의 경우 총 6개의 time step을 가지는 입력 및 출력 시퀀스를 가진다. 또한, 유역 특성(지형정보, 토지피복) 적용에 따른 영향을 평가하기 위해 레이더 자료에 유역 특성 정보를 입력한 모델을 추가로 구축하였다(cGAN_min, cGAN_hr).
모든 모델은 Tensorflow를 기반으로 구축되었으며, 최적화를 위해 ADAM (Adaptive Moment Esimation) optimizer를 사용하였으며, 검증 자료를 통해 계산된 손실을 모니터링하여 조기종료하도록 설계하여 과적합을 방지할 수 있도록 하였다.
훈련이 완료된 모델에 대한 과적합 여부를 확인하기 위해 훈련 데이터에 대한 모델 성능과 성능 평가 데이터에 대한 모델 성능 평가를 수행하였다. 개발된 모델이 미래 1시간 예측을 수행함에 따라 1시간 후 예측 결과에 대해 상관계수(Correlation coefficient, R), 평균제곱근 오차(Root Mean Squared Error, RMSE) 및 0.1 mm/hr 강우 기준에서의 CSI (critical success index)를 계산하였다(Table 1). 결과를 통해, 평가 데이터를 사용한 경우보다 훈련 데이터에서 R은 약 9-12%, RMSE에서는 약 2%, CSI에서는 약 8-14% 더 좋은 성능을 보였다(Table 1). 이를 통해 모델이 훈련 데이터에 대해 더 적합하게 학습되었으며, 평가 데이터에 대한 성능 차이가 10% 내외로, 평가 데이터에 대해서도 안정적인 성능을 보여, 모델이 과적합 없이 적절히 학습된 것으로 확인하였다.
Table 1.
Average performance metrics for 1-hour lead time predictions using train and test datasets for cGAN-based models
2.2 WRF
WRF 모델은 미국 National Center for Atmospheric Research (NCAR)에서 개발된 대기모델로, 이상적인 수치모의, 기상예보 연구 등에 사용되는 비정역학 중규모 대기모델이다. 본 연구에서는 물리과정기반 고해상도 강수 예측 결과를 생성하기 위해 WRF-ARW (Advanced Research WRF) version 4.3.3(Skamarock et al., 2021)을 활용하였다.
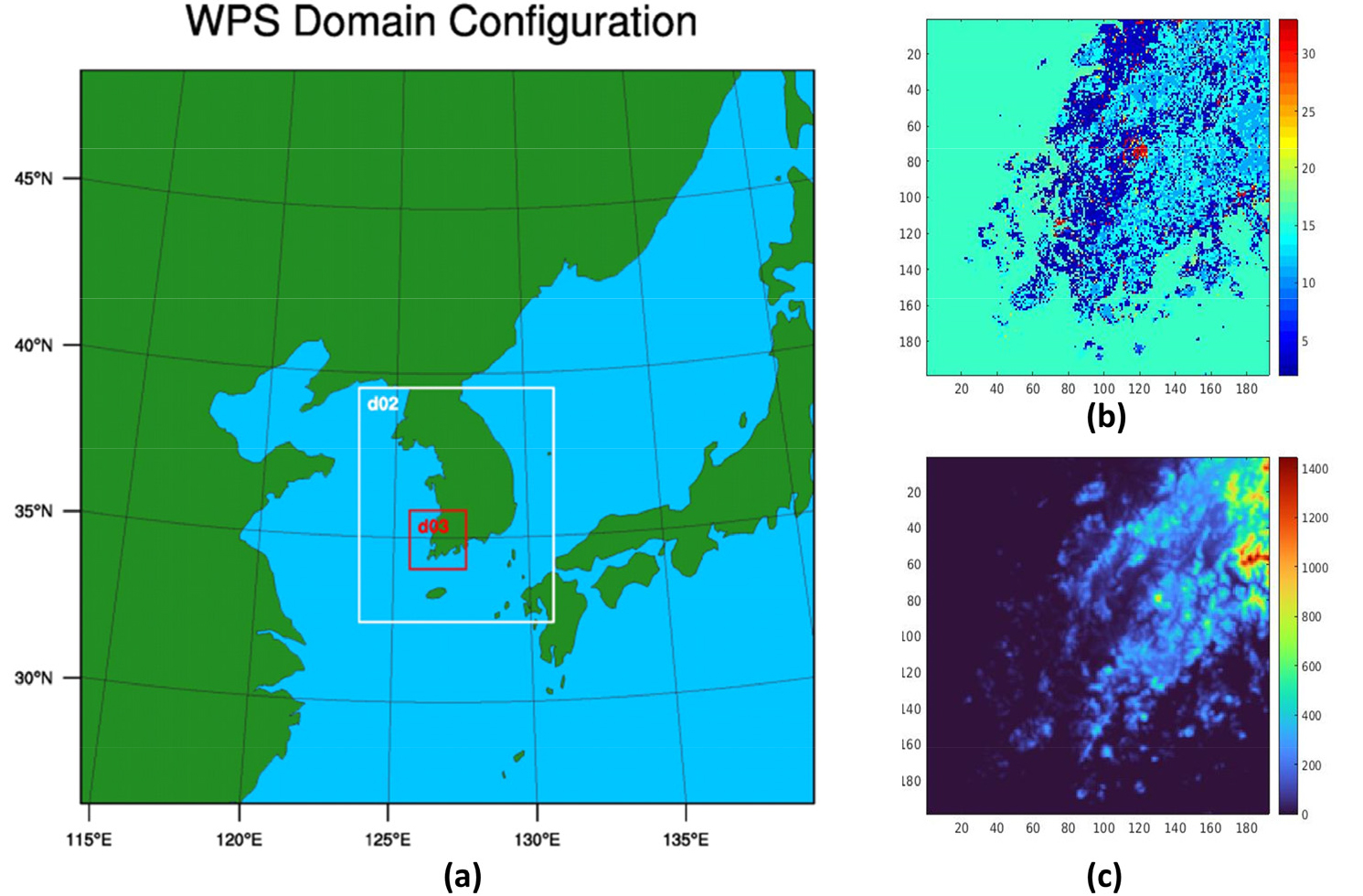
WRF 모델을 영산강 유역에 대해 구동하기 위해 공간 해상도가 각각 15, 3, 1 km인 3개의 nested 도메인을 사용하였다(Fig. 2). 또한, 연구 도메인 영산강 유역(D03)의 도시 및 산악 특성을 보다 효과적으로 반영하는 강수 예측을 생성하기 위해 single-layer urban canopy model (UCM)(Kusaka et al., 2001)을 사용하였다. UCM이 결합된 WRF-UCM의 경우, 지붕, 벽, 도로를 인한 도시 협곡에 의한 대기 프로세스를 표현할 수 있다는 장점이 있다. 모델의 초기 및 경계 조건으로는 ECMWF의 ERA5 재분석 자료(Hersbach et al., 2020)를 사용하였다.
WRF 모델은 여러 물리 파라미터 옵션을 보유하고 있으며, 특히, 미세물리(microphysics), 적운모수화(cumulus parameterization), 행성경계층(planetary boundary layer) 옵션의 경우, 모델의 강우 모의 성능에 많은 영향을 미친다(Ohara et al., 2011; Lee and Sung, 2013). 이에, 본 연구에서는 국내 지역에서 수행된 선행연구(Lee et al., 2015; Won et al., 2019; Oh et al., 2020)을 참고하여 WRF 모델의 물리 파라미터 옵션을 설정하였으며, 최적의 미세물리(microphysics) 옵션을 선정하기 위해 선행연구들에서 제안된 Stony Brook University Scheme (SBU-YLin)(Lin and Colle, 2011), WRF Single moment 3 class (WSM3)(Hong et al., 2004), WRF Double Moment 6 class (WDM6)(Lim and Hong, 2010)에 대한 실험을 수행하였다. 2018년 6-8월에 대한 레이더 기반 강수와 각 미세물리 옵션에 대한 WRF 모델의 6시간 강우 예측결과를 비교한 결과, WSM3을 사용한 경우 RMSE가 3.43 mm/hr, 0.1 mm/hr 강우 기준에서의 CSI가 0.36으로, 가장 높은 성능을 보이는 것을 확인하였다(SBU-YLIN의 RMSE 3.53 mm/hr, CSI 0.30; WDM6의 RMSE 3.56 mm/hr, CSI 0.29). 이에, 최종 물리 파라미터 옵션을 Table 2과 같이 설정하였다.
Table 2.
Physics schemes used in WRF simulations
| Domain | D01 | D02 | D03 |
| East Asia | South Korea | Yeongsangang River basin | |
| No. of grids | 166 × 166 | 220 × 265 | 144 × 144 |
| Horizontal resolution | 15 km | 3 km | 1 km |
| Parent domain | - | D01 | D02 |
| Physics options | Selected physical parameterization | ||
| Microphysics option | WRF Single-Moment 3-Class (WSM3) (Hong et al., 2004) | ||
| Radiation option (longwave) | Rapid radiative transfer Model (RRTM) radiation scheme (Mlawer et al., 1997) | ||
| Radiation option (shortwave) | Rapid radiative transfer Model (RRTM) radiation scheme (Mlawer et al., 1997) | ||
| Surface layer option | Revised MM5 surface layer scheme (Jiménez et al., 2012) | ||
| Land-surface option | Noah land surface model (Tewari et al., 2004) | ||
| Planetary Boundary Layer (PBL) options | Yonsei University planetary boundary layer scheme (YSU) (Hong et al., 2006) | ||
| Cumulus option | Kain-Fritsch cumulus scheme (only for D01) (Kain and Fritsch, 1990) | ||
WRF 모델의 예측 성능에는 물리 파라미터 옵션뿐만 아니라 스핀업(spin-up) 기간이 중요한 영향을 미친다. 긴 스핀업 기간 설정은 모델을 안정화하는 데에 효과적이나, 12시간 이내의 단기 예측에서 과도한 스핀업 시간에 따른 성능 저하 가능성이 존재한다(Düben et al., 2014; Ma et al., 2021). 또한, 6시간 단기 예측, 즉 실시간 예보 수준의 모의를 수행하는 연구 환경에 따라, 계산 자원의 효율적 사용을 고려하여 6시간 이내의 스핀업 기간 선정이 필요하다. Zhao and Xue (2009)은 수치예보모델을 활용한 단기 강우 모의 수행 시, 관측 데이터를 동화하지 않아도 초기 강수 분포가 1~2시간 이내에 신속히 형성될 수 있음을 보였으며, 이에 WRF 모델을 기반으로 6시간의 기상 예측을 생성하기 위해 초반 2시간을 스핀업 기간으로 설정하여 이후 예측된 6시간 자료를 결과분석에 활용하였다. 모든 WRF 예측 결과는 레이더 자료와 동일한 위경도 좌표 및 도메인크기(128 × 128)을 가지도록 하는 후처리 과정이 수행되었다.
2.3 자료 구축
본 연구에서는 개발된 모델의 성능 분석을 위해 국내 영산강 유역에 대한 사례 연구를 진행하였다. 특히 영산강 대권역 내의 두 중권역인 황룡강과 영산강 상류를 중심으로 연구대상지역을 설정하였다(Fig. 2). 레이더 자료는 기상청에서 제공하는 1.5 km의 constant altitude plan position indicator (CAPPI) 자료를 사용하였으며, 이는 한반도를 포함한 960 × 1,200 pixels 크기의 이미지 자료로, 1 km의 공간 해상도를 가지며, 10분 단위의 시간 해상도를 갖는다.
모델 훈련을 위해 영산강 유역 학습 도메인에서 128 × 128 pixels로 데이터를 추출하였고, 레이더 반사도 값(dBZ)은 0에서 255까지의 Grey scale로 변환하여 모델이 효과적으로 훈련할 수 있도록 하였다.
모델 훈련과 평가에 사용된 자료는 2014년부터 2018년까지 여름철(6월~8월)의 강우 발생(최대 레이더 반사도가 10 dBZ 이상(약 0.15 mm/hr)인 경우) 사례에 대한 자료를 수집하여 사용하였다. 2014년부터 2017년까지의 총 12,684개 데이터 중 10%(1,269개 자료)는 무작위로 추출하여 훈련 중 검증 자료로 활용되었으며, 모델 훈련 자료로는 검증 자료를 제외한 11,415개 자료를 사용하여 중복되는 기간이 없도록 하였다. 최종 모델 성능 평가는 2018년 여름철(6월~8월)의 데이터를 통해 이루어졌으며, WRF 모델과 동일한 강우 이벤트에 대한 성능 평가를 진행하기 위해 WRF 결과에 대응하는 레이더 자료(총 293개 자료)를 추출하여 사용하였다.
본 연구에서는 강우 예측 성능 향상을 위해 모델이 유역 특성 정보를 반영하도록 하였다(Figs. 2(b) and 2(c)). 지형정보와 토지피복 정보와 같은 유역 특성은 온도, 습도, 구름 형성 등 대기 조건에 영향을 미쳐 강우의 형성과 분포에 중요한 역할을 하기 때문에 모델의 추가입력자료로 선정되었다(Basist et al., 1994; Prudhomme and Reed, 1998). 지형 정보 자료로는 미국 지질조사국(USGS)과 미국 국토지리정보국(NGA)에서 개발한 Global Multi-resolution Terrain Elevation Data (GMTED2010)를 기반으로 생성하였고, 토지피복정보는 환경부에서 제공하는 2000~2004년도 기준의 중분류 토지피복지도와 통계지리서비스 웹페이지에서 제공한 수도권 지역 시군구 단위 인구밀도 지도를 사용하여, USGS Landuse 분류로 재산정하는 과정을 수행하였다. 각 자료는 영산강 유역 도메인에 맞게 추출되었으며, 레이더 자료와 동일한 위경도 좌표 및 공간해상도를 가지도록 보간하는 과정을 수행하였다. 모든 입력자료는 효과적인 훈련을 위해 Min-Max scaling 기법을 통해 0에서 1 사이의 값으로 조정되었다.
2.4 성능 평가 지표
본 연구에서는 cGAN 기반 모델 및 WRF 모델의 예측 성능 평가를 위해 R, RMSE 및 CSI를 평가지표로 사용하였다. 상관계수 R은 관측 강우량과 모델 예측값과의 상관관계를 설명할 수 있으며, 값이 클수록(1에 가까울수록) 강한 양의 상관 관계를 가져 모델이 우수한 예측 성능을 가지는 것을 확인할 수 있다(Eq. (4)). 또한, RMSE를 통해 각 모델과 관측값과의 오차를 분석하여 정밀도를 확인할 수 있다(Eq. (5)). 각 산출 식에서 는 관측값, 모델 예측값으로, 전체 데이터 기간 중 번째 값을 의미한다(, 는 각각 관측값과 모델 예측값의 평균).
CSI는 강우예측 모델의 성능 평가 시 주로 사용되는 범주형 예보 성능 지표로, 강수 이벤트에 대한 모델 예측 정확도를 설명할 수 있다. CSI는 실제 강우 이벤트 발생 유무와 모델이 예측한 강우 이벤트 발생 유무를 계산한 contingency table (Table 3)을 통해 구할 수 있다(Eq. (6)).
Table 3.
Contingency table
| Observation | |||
| Event detected | Event not detected | ||
| Prediction | Event detected | Hit | False alarm |
| Event not detected | Miss | Correct non-event | |
본 연구에서는 hits, false alarms, misses를 0.1 mm/hr, 1.0 mm/hr의 서로 다른 강우 강도 기준에서 산출하여, 이를 통해 계산된 CSI가 1에 가까울수록 예측 성능이 높다고 평가하였다. 개발된 cGAN 기반 모델이 미래 레이더 반사도 이미지를 생산하므로, 모든 성능 평가 지표는 모델 예측 결과 레이더 반사도를 강우량으로 변환하기 위해 Z-R 관계(Marshall and Palmer, 1948)를 사용하는 과정을 수행하였다(Eq. (7)).
여기서 Z, R은 각각 레이더 반사율 계수(mm6/m3) 및 강우량(mm/hr)을 의미한다.
3. 모델 구축 및 결과 분석
3.1 유역 특성 및 레이더 입력자료의 시간해상도에 따른 cGAN 기반 모델 성능평가
본 연구에서는 cGAN 기반 모델 개발 시, 추가적으로 입력된 유역특성 정보의 유무 및 레이더 입력자료의 시간해상도가 10분, 1시간으로 변화함에 따른 성능 평가를 진행하였다. 개발된 모델들을 통해 최대 6시간까지 강우 예측 결과를 생산하기 위해, 이전 예측 결과를 다음 예측의 입력자료로 활용하는 재귀적 프로세스를 수행하였다. 산출된 결과는 관측값과 비교하여 영산강 유역 도메인의 모든 격자에 대해 boxplot으로 표현하였다(Fig. 3). 본 연구에서는 CSI 결과에서 1/e (≈ 0.37)를 충분한 예측 성능의 임계값으로 설정하였다. 이는 Berenguer et al. (2011)에서 Germann and Zawadzki (2002)를 인용하여 제안한 강수 시스템의 예측 가능성 평가 기준에서 착안한 것으로, 강수 시스템에서 시간이 지남에 따라 점진적으로 감소하는 지표가 1/e 이하로 감소하는 시점을 예측 가능 시간의 한계로 정의한 것에 기반한다.
유역 특성을 추가한 cGAN_hour, cGAN_min과, 레이더 자료만을 사용한 cGAN_hour (only radar), cGAN_min (only radar)를 비교한 결과, R과 CSI에서 모두 유역 특성을 반영한 경우 모델 성능이 전반적으로 개선되었으며, 특히, 1.0 mm/hr 강우 기준에서의 CSI 결과(Fig. 3)에서 유역특성 적용에 따른 성능 변화가 선행시간 증가에 따라 두드러지며, 이는 CSI를 결정하는 요소에 대한 결과에서(Fig. 4) 유역 특성을 적용한 경우 맞힌 예보(hit)가 증가하며, 놓친 예보(miss)를 감소시킴으로써 전반적인 예측 성능이 개선된 것으로 확인된다. 반면, 유역 특성을 적용한 이후 거짓 알림(false alarm)이 증가하고 부의 정확(correct not-event)이 감소하는 결과를 통해, 레이더 자료만을 이용한 모델의 과소추정 경향을 유역 특성 정보 활용을 통해 개선할 수 있으나, 일부 과대추정이 발생할 가능성이 있음을 알 수 있다.
레이더 입력자료의 시간해상도를 10분(cGAN_min, cGAN_min (only radar), 1시간(cGAN_hour, cGAN_hour (only radar))으로 다르게 설정한 모델을 비교한 결과, 중심 구조가 동일한 모델이라해도 입력자료의 시간 해상도에 따라 그 성능이 다르게 나타나는 것을 확인할 수 있었다(Fig. 3). 초기 1시간의 선행시간에서는 R 결과(Fig. 3)에서 cGAN_min의 성능이 가장 우수하나, 선행시간 증가 시, cGAN_hour와 유사한 결과를 보이는 것을 확인할 수 있다. 하지만, RMSE 결과(Fig. 3)에서 cGAN_hour에 비해 cGAN_min 모델의 성능이 크게 개선된 것을 통해, 10분 단위 시간해상도의 레이더 입력자료를 사용한 경우, 1시간 시간해상도의 자료를 사용한 경우보다 모델의 과도한 오차를 줄일 수 있음을 확인할 수 있다. 또한, CSI 비교(Fig. 3)를 통해 cGAN_min 모델이 모든 선행시간에서 강우 이벤트 예측에 cGAN_hour를 능가하는 성능을 유지하는 것을 확인할 수 있다. 이는 Fig. 4에서 cGAN_hour가 맞힌 예보(hit)와 놓친 예보(miss)에서는 좀 더 좋은 성능을 보이지만, 거짓 알림(false alarm)이 두드러지게 차이나며 결과적으로 CSI가 cGAN_min보다 감소하게 되는 것을 확인할 수 있다. 이를 통해, 1시간 시간해상도의 입력자료를 사용한 경우, 모델의 과대추정 경향이 강해지며, 이는 모델에서 합성곱 연산을 수행하는 커널 사이즈(3 × 3)에 비해 입력 레이더 자료의 강수영역의 시공간적 변화가 1시간 단위에서 더 크게 나타나므로 모델이 강우의 공간 분포를 잘 학습하지 못한 것을 원인으로 해석할 수 있다(Shi et al., 2015).
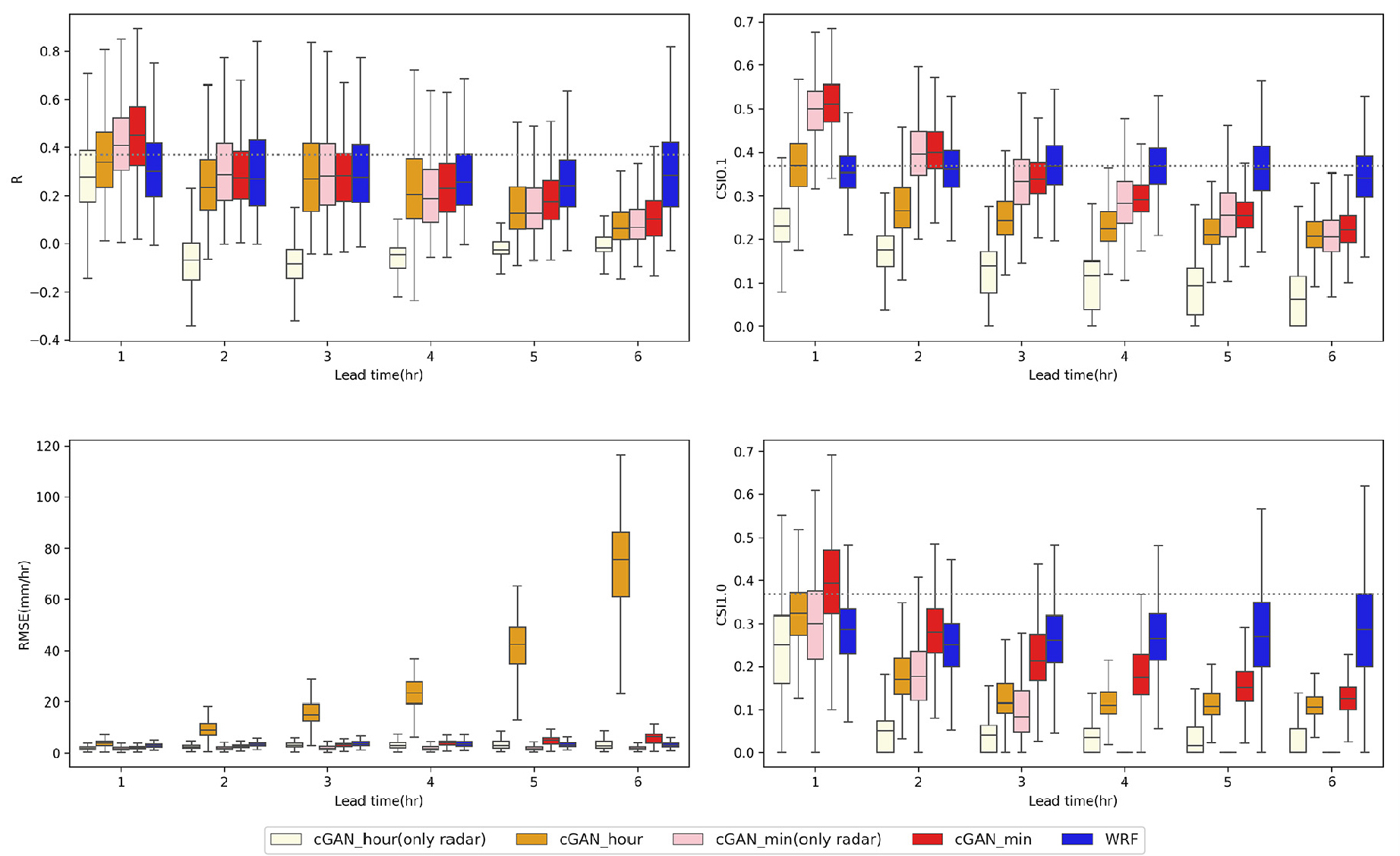
Fig. 3.
Box plot of the verification metrics of model predictions at the lead time up to 6 hours over all grid cells from the Yeongsangang River domain. From top to bottom, the left panels represent R and RMSE. and the right panels represent the CSI at intensity thresholds of 0.1, and 1.0 mm/hr. Grey dotted line represents the predictability threshold (1/e ≒ 0.37)
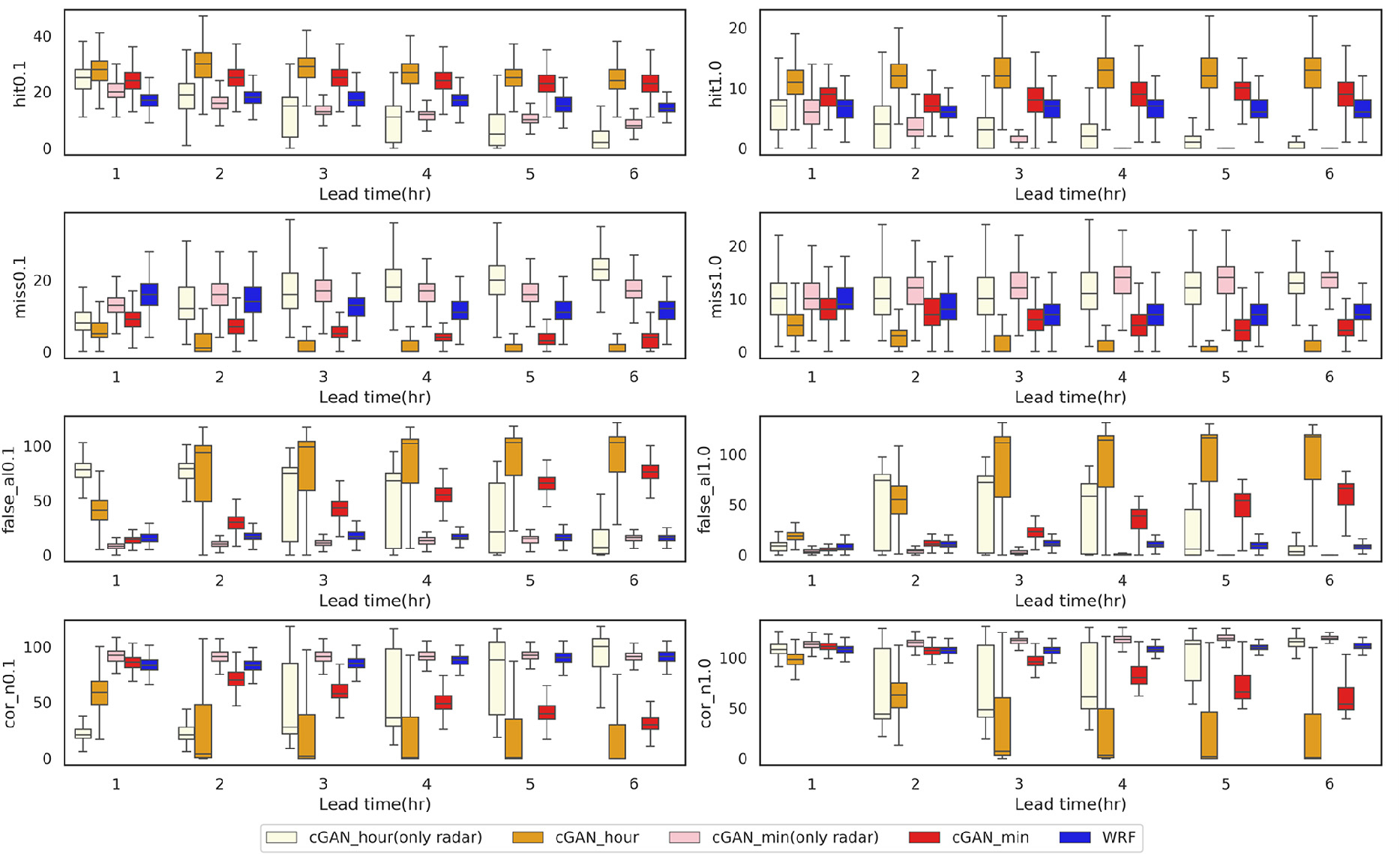
Fig. 4.
Box plot of model prediction performance across all grid cells within the Yeongsangang River domain for lead times up to 6 hours. From top to bottom, the left panels show hit (hit), miss (miss), false alarm (false_al), and correct non-event (cor_n) counts at the 0.1 mm/hr intensity threshold, while the right panels present the corresponding counts at the 1.0 mm/hr intensity threshold
3.2 WRF 모델 vs. cGAN 기반 모델 성능 평가
개발된 cGAN 기반 모델과 WRF 모델을 비교하기 위해 최대 6시간 선행시간에 대한 강우 예측을 생산하였으며, 관측값을 통해 계산된 성능평가 지표들은 영산강 유역 도메인의 모든 격자에 대해 boxplot으로 표현하였다(Fig. 3).
모든 성능 지표에서 WRF 모델은 선행시간 증가에 따른 큰 성능 변화 없이 일정한 수준을 유지하는 것을 확인할 수 있었다. 특히, R, CSI에서 초기 1~2시간 이내 선행시간에서는 cGAN 기반 모델이 WRF 모델보다 더 좋은 성능을 보이는 것에 반해, 선행시간이 3시간 이후로 늘어나는 경우, WRF의 성능이 머신러닝 기반 모델을 능가하는 것을 확인할 수 있다. 이러한 경향은 초기 3시간 선행시간에 대한 성능지표 평균과 후기 3시간 선행시간에 대한 성능지표 평균(Table 4)을 통해서도 확인할 수 있다. 초기 3시간에서는 RMSE를 제외하고 R, CSI에서 cGAN_min이 가장 좋은 성능을 보이는 것에 반해, 후기 3시간에서는 WRF 모델의 평균 성능이 cGAN 기반 모델에 비해 우수한 것을 확인할 수 있다.
Table 4.
Average performance metrics for the first and last 3-hour lead times for each model (best performance is indicated in bold)
CSI 결과(Fig. 3)에서 cGAN 기반 모델들이 예측 선행시간 2시간 이후로 median이 급격히 저하되며, 충분한 예측성능(0.37 이하)를 확보하지 못하는 것에 반해, WRF 모델은 모든 선행시간에서 적절한 수준의 예측 성능을 제공하는 것을 확인할 수 있다. 이는 모든 예측 선행시간에서 유역 특성을 적용한 cGAN_min, cGAN_hour이 맞힌 예보(hit)가 WRF에 비해 더 많지만, 선행시간이 증가하더라도 일관적인 수준의 예보 정확성을 유지하는 WRF 모델과 달리 거짓 알림(false alarm)이 선행 시간 증가에 따라 급격히 많아지며(Fig. 4), 이에 따라 초기 1~2시간 이후 전반적인 CSI 값이 WRF 모델에 비해 두드러지게 저하되는 것으로 해석할 수 있다.
이러한 결과를 통해 물리 기반 모델인 WRF는 초기 선행시간에서는 우수한 성능을 보이지 못하지만, 선행시간이 길어질수록 관측값에 가까운 정확한 예측 결과를 생산할 수 있다고 판단할 수 있다. 이는 기존 데이터 기반 모델과 물리과정 기반 모델의 선행시간 증가에 따른 성능 변화 양상과 일치하는 결과로(Berenguer et al., 2012), 머신러닝 기법을 통해 레이더 자료 기반 강우 예측 모델의 성능이 개선되더라도, 데이터 기반 모델로써의 한계점이 존재한다는 것을 시사한다.
본 연구에서는 물리과정 기반 WRF 모델과 머신러닝 기반 모델인 cGAN 기반 모델의 강우 예측 성능을 비교함과 동시에, 예측 자료 생산에 소요되는 모의 시간을 분석하여 두 모델의 시간 효율성을 평가하였다. cGAN 기반 모델은 초기 훈련 과정에서 약 90시간이 소요(NVIDIA Tesla A100 GPU 사용)되지만, 훈련이 완료된 이후에는 새로운 미래 6시간 예측을 생성하는 데 30초 이내로 매우 짧은 시간이 소요된다. 반면, WRF 모델은 물리 파라미터 보정 및 입력 자료가 준비되면 즉시 예측 자료 생산이 가능하여 별도의 훈련 과정이 필요 없으나, 물리적 과정을 기반으로 6시간 예측 자료를 생성하는 데 최대 30분이 소요(Linux HR740 SERVER, CPU 36 core 사용)된다. 이러한 결과는 실시간 예측과 같이 빠른 예측이 요구되는 상황에서, 충분히 훈련된 cGAN 모델이 시간 효율성 측면에서 더 적합하고 활용 가능성이 높음을 시사한다.
3.3 모델 별 강우 예측 성능의 정성적 평가
본 연구에서는 각 모델의 성능 평가 결과를 해석하기 위해 특정 강우 이벤트에 대한 예측 이미지를 생성하여 비교하는 과정을 수행하였다. 연구대상지역 내 강우 공간분포 시공간적 변화 예측 성능을 확인하기 위해 2018년 6월 30일 16:00을 예측 시작시간으로 하는 강우 사상을 선정하였으며(Fig. 5), 강우 이동에 따른 소멸에 대한 모델의 예측 성능을 평가하고자 2018년 8월 24일 04:00에 대한 강우 사상을 선정하여 성능을 정성적으로 평가하였다(Fig. 6).
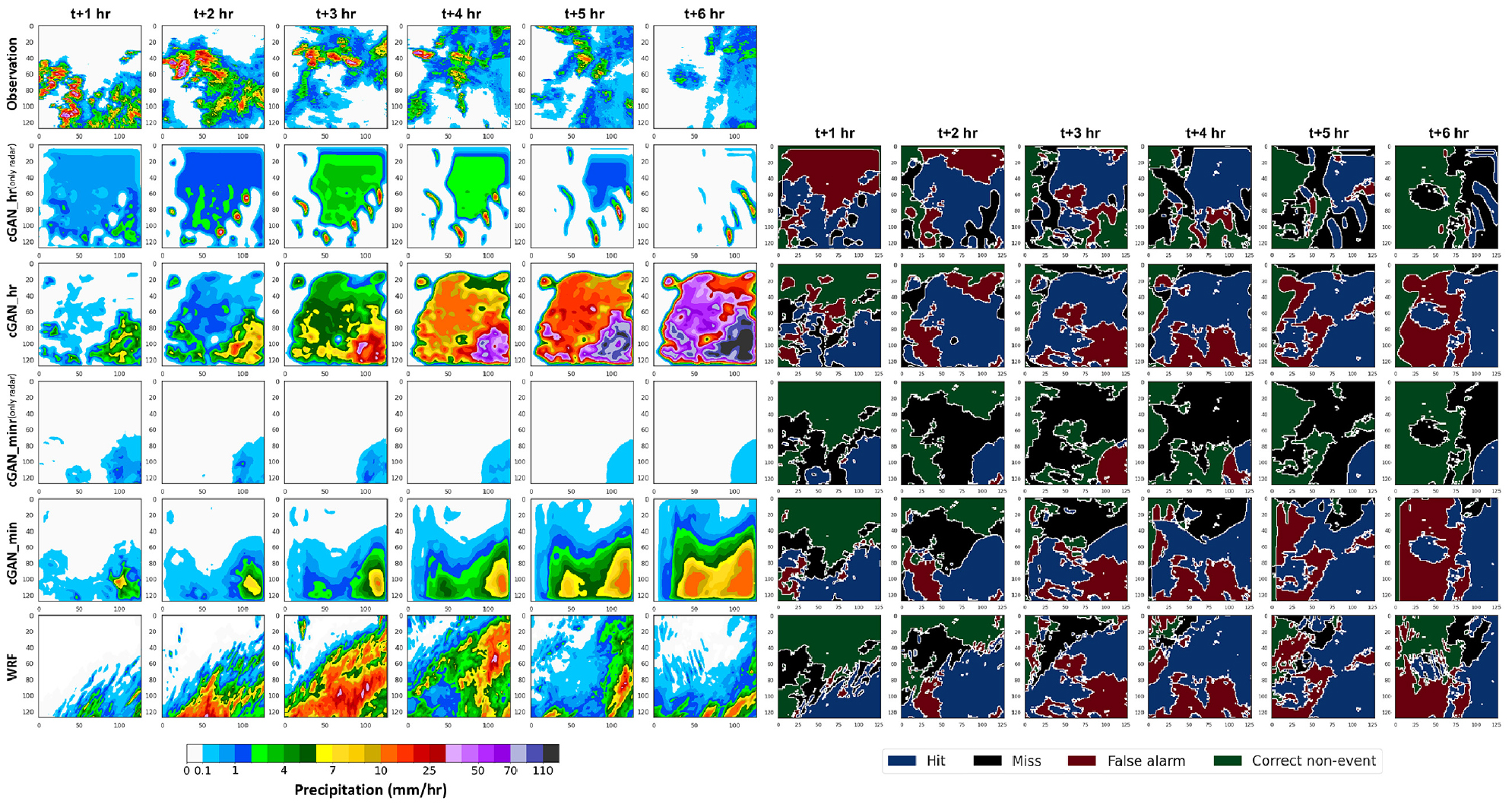
Fig. 5.
Example of precipitation at forecasting time t = 30 June 2018, 16:00, for model predictions. From top to bottom, the left panels show ground truth (OBS), predictions from cGAN-hr(only radar), cGAN-hr, cGAN-min(only radar), cGAN-min, and WRF. The right panel visualizes the spatial distribution of hit, miss, false alarm, and correct non-event pixels for each model
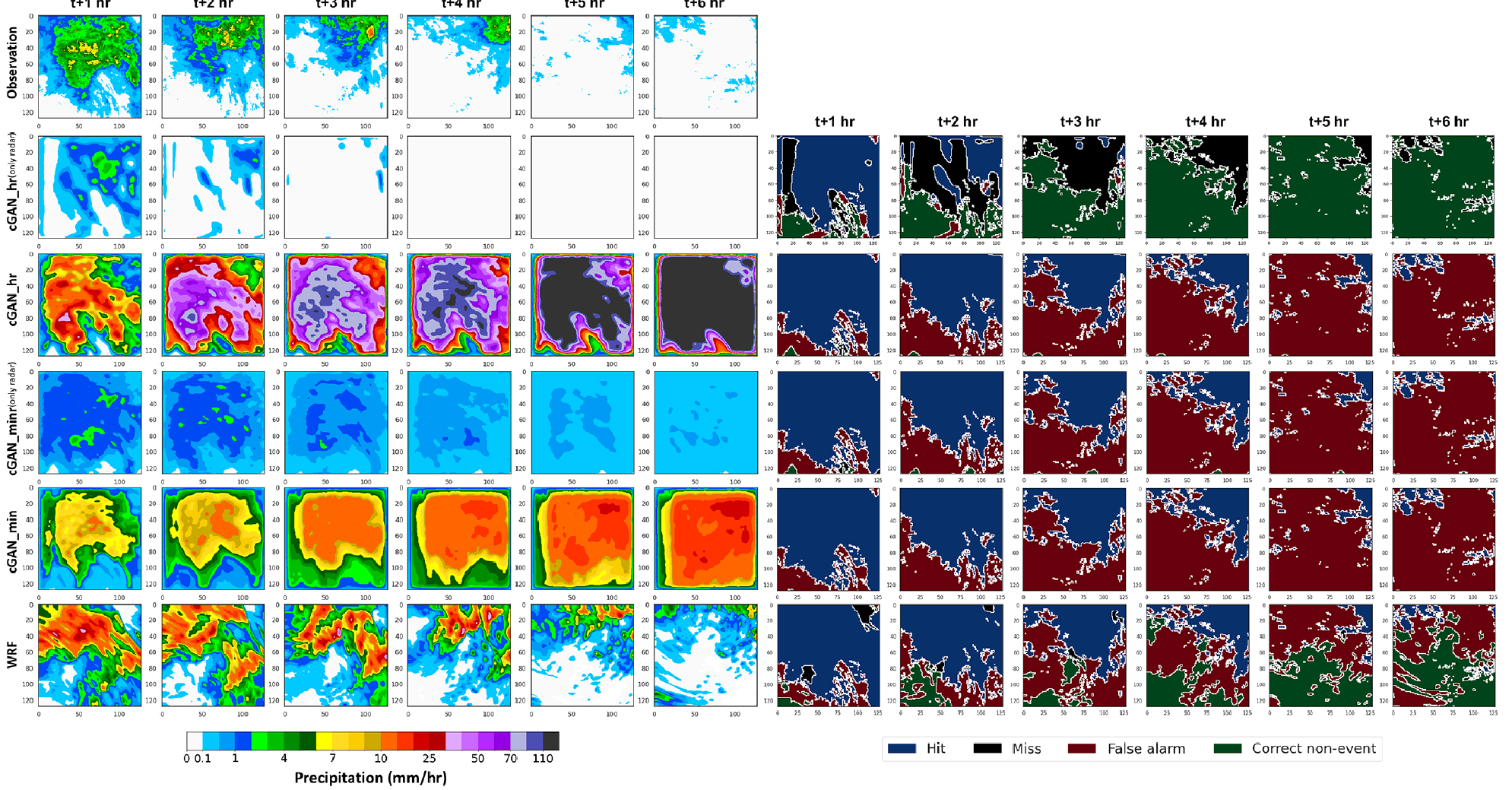
Fig. 6.
Example of precipitation at forecasting time t = 24 August 2018, 04:00, for model predictions. From top to bottom, the left panels show ground truth (OBS), predictions from cGAN-hr(only radar), cGAN-hr, cGAN-min(only radar), cGAN-min, and WRF. The right panel visualizes the spatial distribution of hit, miss, false alarm, and correct non-event pixels for each model
먼저, 유역 특성 적용에 따른 cGAN 기반 모델의 정성 비교 결과, 레이더 자료만을 사용하여 훈련된 cGAN_hour (only radar), cGAN_min (only radar)의 경우, 전반적으로 과소추정 경향이 발생하는 것을 확인할 수 있으며, 특히 선행시간 증가에 따라 그 경향이 강화된다(Figs. 5 and 6). 이로 인해, 맞힌 예보(hit)가 감소하는 것을 확인할 수 있다. 반면, 유역 특성을 적용한 cGAN_hour, cGAN_min 모델에서는 이러한 과소추정 경향을 해결하여 맞힌 예보(hit)를 개선하였으나, 선행시간 증가에 따라 과대추정 경향이 나타나 거짓 알림(false alarm)의 비율 또한 증가하는 것을 확인할 수 있다(Fig. 5, Table 5). 이러한 과대추정 경향은 입력 자료의 시간해상도가 10분(cGAN_min)으로 줄어들었을 때 다소 해소되지만, 여전히 존재하며, 이는 강우 소멸 사상(Fig. 6, Table 6)에서 두드러지게 나타나 후기 3시간 선행시간 이상의 강우가 소멸하는 사상의 경우, 거짓 알림(false alarm)이 급격히 늘어나 cGAN기반 모델의 예측 성능에 영향을 미치는 것을 확인할 수 있다.
Table 5.
Average of performance metrics at the forecast time of 30 June 2018, 16:00 (Fig. 5), including CSI at 0.1 mm/hr, and ratios of hits, misses, false alarms, and correct non-events, by lead time for each model (best performance is highlighted in bold)
Table 6.
Average of performance metrics at the forecast time of 24 August 2018, 04:00(Fig. 6), including CSI at 0.1 mm/hr, and ratios of hits, misses, false alarms, and correct non-events, by lead time for each model (best performance is highlighted in bold)
cGAN 기반 모델과 WRF 모델을 비교한 결과, WRF 모델과 달리 cGAN 기반 모델이 모든 선행 시간에서 유사한 예측을 생성하는 것을 볼 수 있다(Figs. 5 and 6). 이는 cGAN 기반 모델이 본래 1시간 예측을 수행하는 모델로, 2시간 이후 예측 결과의 경우, 관측 이미지가 아닌 앞서 예측된 결과를 사용하여 결과를 생성하는 재귀적 프로세스를 이용했기 때문에 시간이 증가할수록 블러링 효과가 강해지며, 일관적인 이미지를 산출하는 것으로 판단된다. 이로 인해, 초반 1~2시간의 강우 영역을 예측하는데에는 cGAN 기반 모델이 WRF 모델보다 관측값에 가까운 이미지를 생성하지만, WRF 모델이 시간 흐름에 따른 강우 영역의 시공간적 변화가 더 잘 반영하는 것을 볼 수 있다. 이는 Table 5에서 WRF 모델이 모든 선행시간에서 일관적인 예보 정확성을 보이는 결과를 뒷받침한다. 또한, 강우 소멸 사상(Fig. 6)에서 WRF 모델은 강수 영역이 오른쪽 위로 이동함에 따른 소멸 경향을 잘 예측하며, 이에 따라, 거짓 알림(false alarm)을 효과적으로 줄임으로써, 전반적인 CSI 결과가 cGAN 모델에 비해 우수한 것을 확인할 수 있다. 이러한 결과는 앞서 성능 지표에서도 확인하였듯 WRF 모델이 R 및 CSI에서 예측력 기준인 0.37을 전반적으로 유지하는 현상과 일관적인 결과로, 선행시간이 길어질수록 순수 데이터 기반 모델의 성능을 개선하기 위해서는 물리과정을 반영하는 과정이 필요하다는 것을 시사한다.
4. 결 론
본 연구에서는 물리과정 기반 기상 모델과 머신러닝 기반 강우 예측 모델을 구축하고, 예측 선행시간 증가에 따른 강우 예측 성능 변화를 분석하였다. 영산강 유역에 대해 최대 6시간까지 강우예측 결과를 생성하기 위해 cGAN 기반 모델을 개발하고, 고해상도 대기 시뮬레이션 및 기상 예보 등에 사용되는 WRF 모델을 통해 머신러닝 기반 모델 성능을 비교 및 평가하고자 하였다.
cGAN 모델은 입력 자료로부터 타겟 이미지를 생성하는 생성자와, 생성된 이미지를 실제 이미지와 비교하는 판별자로 구성되어 있으며, 생성자는 합성곱 신경망을 기반으로 구축되었다. 본 연구에서는 연구대상지역인 영산강 유역의 특성 정보(지형, 토지피복) 자료의 영향과, 레이더 입력자료의 시간해상도(10분, 1시간)에 따라 cGAN 모델을 개발 하여 성능 평가를 진행하였다. 유역 특성 정보를 추가로 입력함에 따라 레이더 기반 cGAN 모델의 과소추정 경향을 해결할 수 있음을 보였으며, 모델이 레이더 반사도 영역의 시공간적 변화의 크기에 따라 다른 성능을 보였다. 특히, 더 작은 10분 시간해상도의 레이더 입력 자료를 사용하였을 때, 1시간 시간해상도의 자료를 사용한 경우의 과대추정 경향을 해결하여, 전반적으로 더 좋은 성능을 보이는 것을 확인하였다. 하지만 유역특성 자료와 10분 시간해상도의 레이더 자료를 적용한 최적의 cGAN 기반 모델에서도 선행시간 증가 시 이전 예측 결과와 유사한 결과를 생성하며, 전반적으로 블러링 효과가 발생하였고, 과대추정 경향이 존재하였다. 이에 반해 WRF 모델은 초기 1~2시간 선행시간에서는 cGAN 모델보다 낮은 성능을 보였으나, 강우 영역의 시공간적 변화를 잘 반영하여, 3시간 이후 선행시간에 대해 고품질의 예측 결과를 산출하는 데 더 효과적임을 확인하였다.
본 연구에서는 국내 영산강 유역을 대상으로 cGAN 모델을 구축하고 WRF 모델과 비교 평가하여, 선행시간 증가에 따른 각 모델의 성능 변화를 분석하였다. 다만, 강우 레이더 반사도를 강우 강도로 변환하는 과정에서 단일 Z-R 관계식을 사용하였으며, 이는 다양한 강우 사상을 충분히 반영하지 못해 오차를 유발할 가능성이 있다. 이러한 한계는 기상청에서 제공된 레이더 반사도 원자료를 기반으로 개발된 cGAN 모델의 특성상, 추후 반사도 예측 결과에 다양한 Z-R 관계식을 적용함으로써 개선될 수 있을 것으로 기대된다.
최근 빅데이터 및 인공지능 기술의 발달로 강우 레이더 자료 기반 예측 모델의 성능을 개선하는 데에 머신러닝 기법이 활발하게 이용되며 그 효과를 입증하고 있으나, 선행시간 증가에 따른 성능 감소는 여전히 머신러닝 기반 모델이 해결해야 할 주요과제로 지목되고 있다. 본 연구에서는 6시간 강우 예측시 모든 선행시간에서 충분한 성능을 확보하기 위해서는 머신러닝 기반 모델뿐만 아니라 대기의 복잡한 물리적 프로세스를 반영하는 물리과정 기반 모델을 결합하여 장단점을 보완할 필요성을 제시한다. 이는 물리적 복잡성을 반영하는 동시에 머신러닝의 데이터 활용 효율성을 극대화하는 융합적 접근의 중요성을 보여주며, 향후 강우 예측 성능 향상을 위한 물리과정-인공지능 융합적 방법론의 발전에 기여할 수 있는 토대가 될 것으로 기대한다.
